A Real-Time Robust Method to Detect BeiDou GEO/IGSO Orbital Maneuvers

Abstract
:1. Introduction
2. Materials and Methods
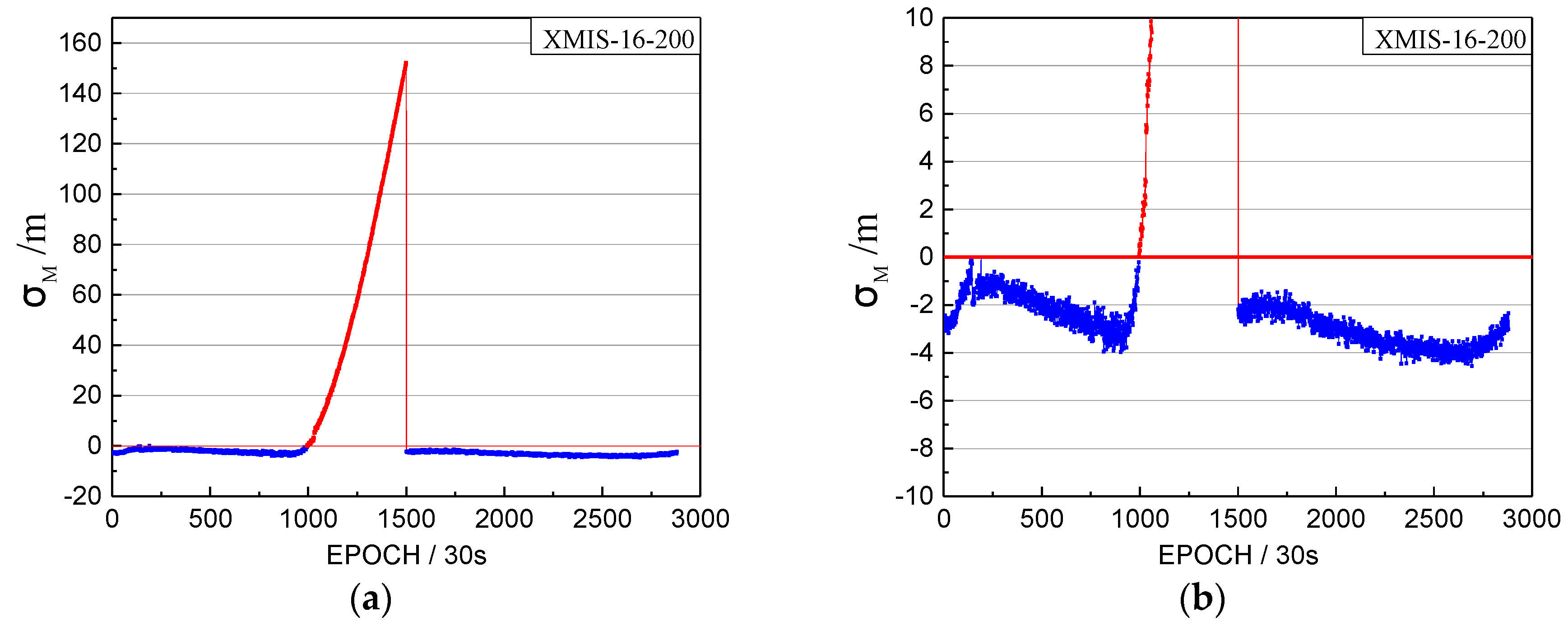
2.1. Time Discriminant Factor of Satellite Orbit Maneuver
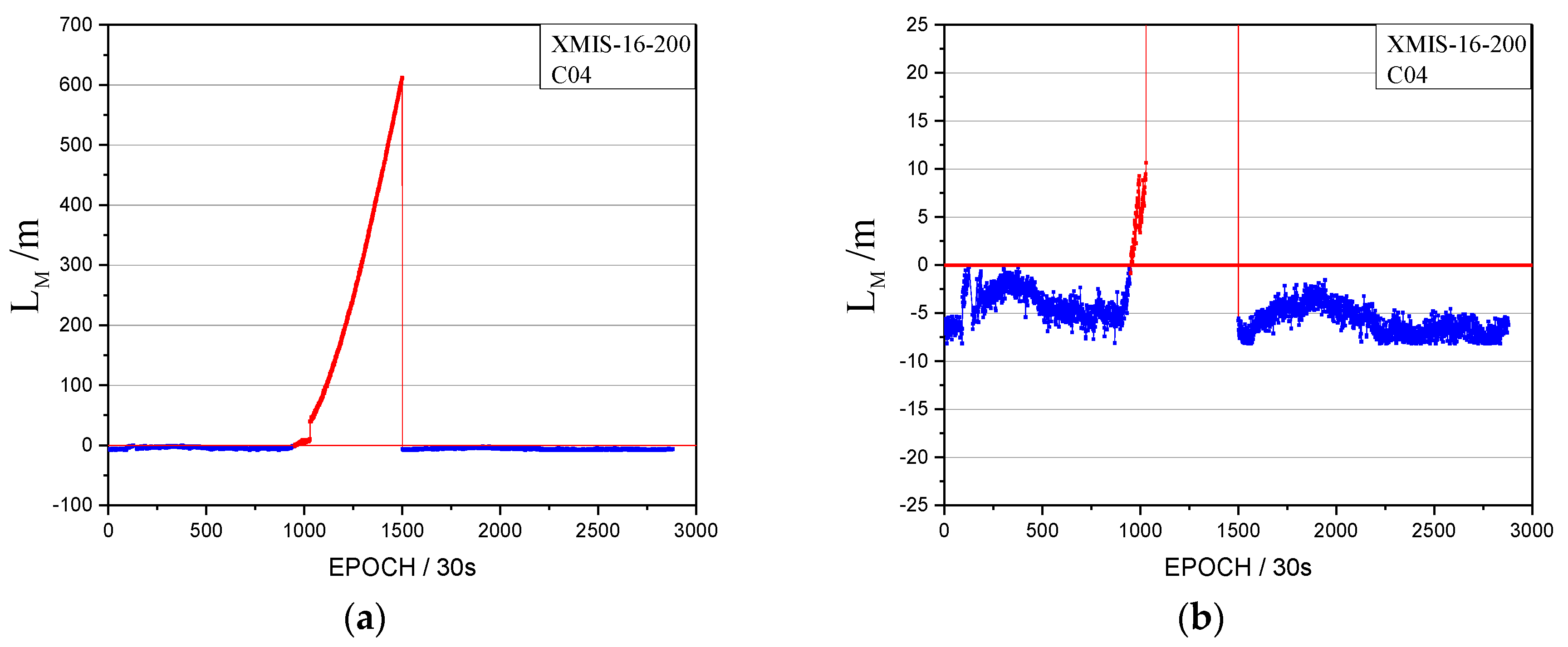
2.2. The Satellite Identification Factor of Satellite Orbital Maneuver
2.3. Robust Equivalent Weight Matrix of the Observations
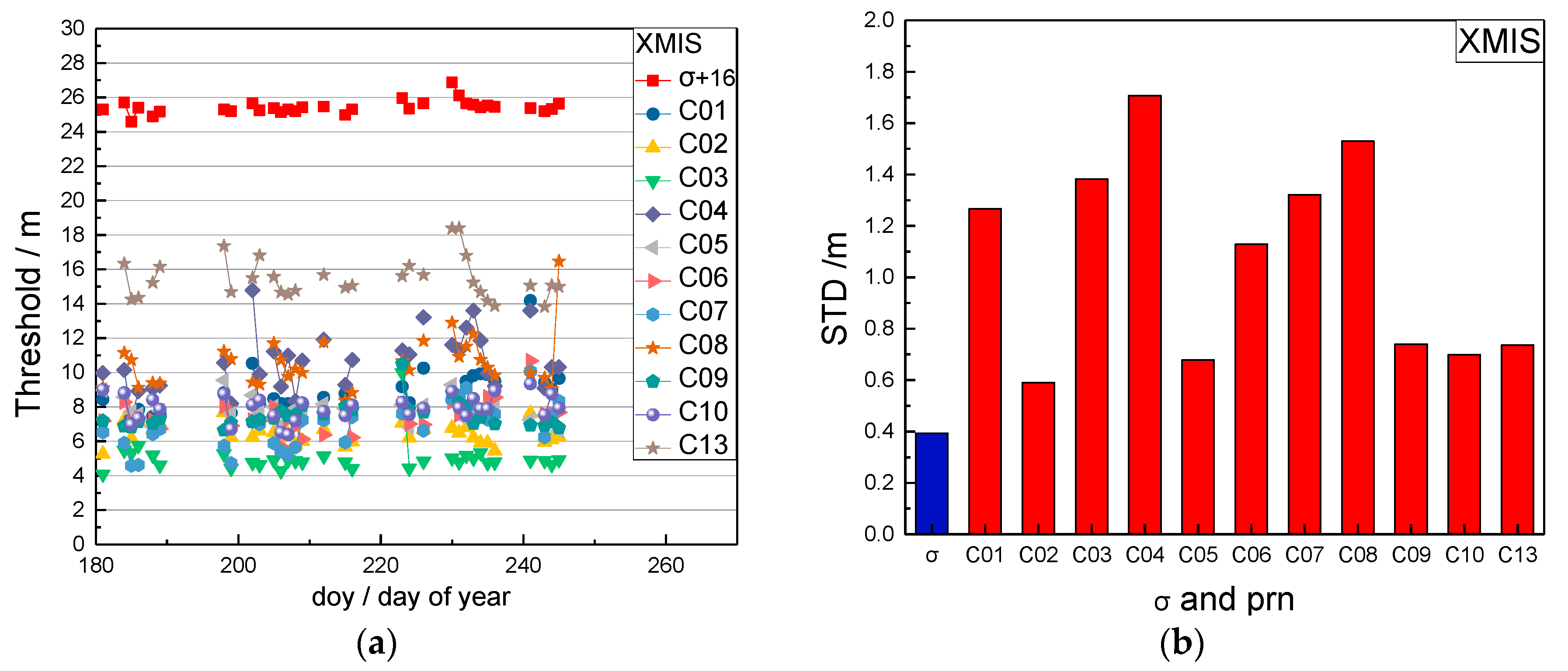
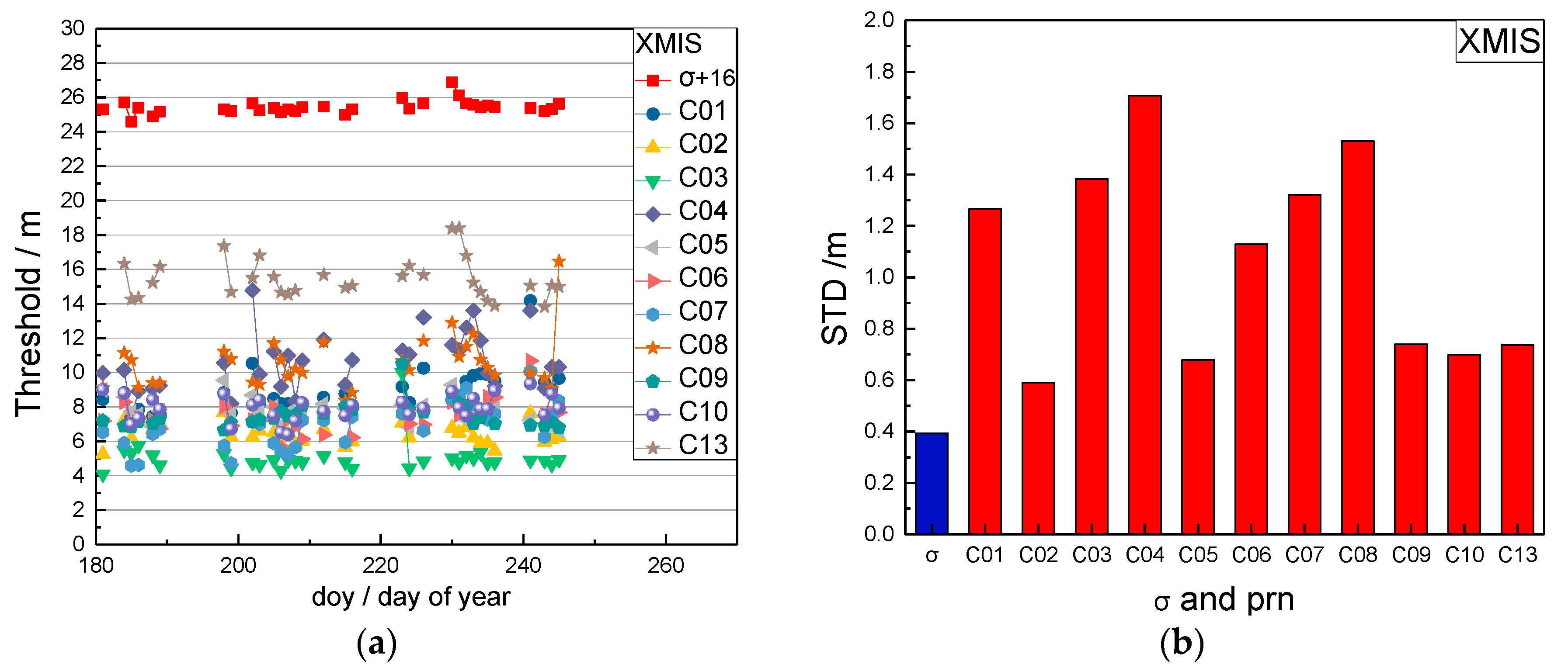
2.4. The Selection of Empirical Threshold
- (1)
- The thresholds of the time factor and the satellite factor should be achieved by the above method in Section 2.1, Section 2.2 and Section 2.3
- (2)
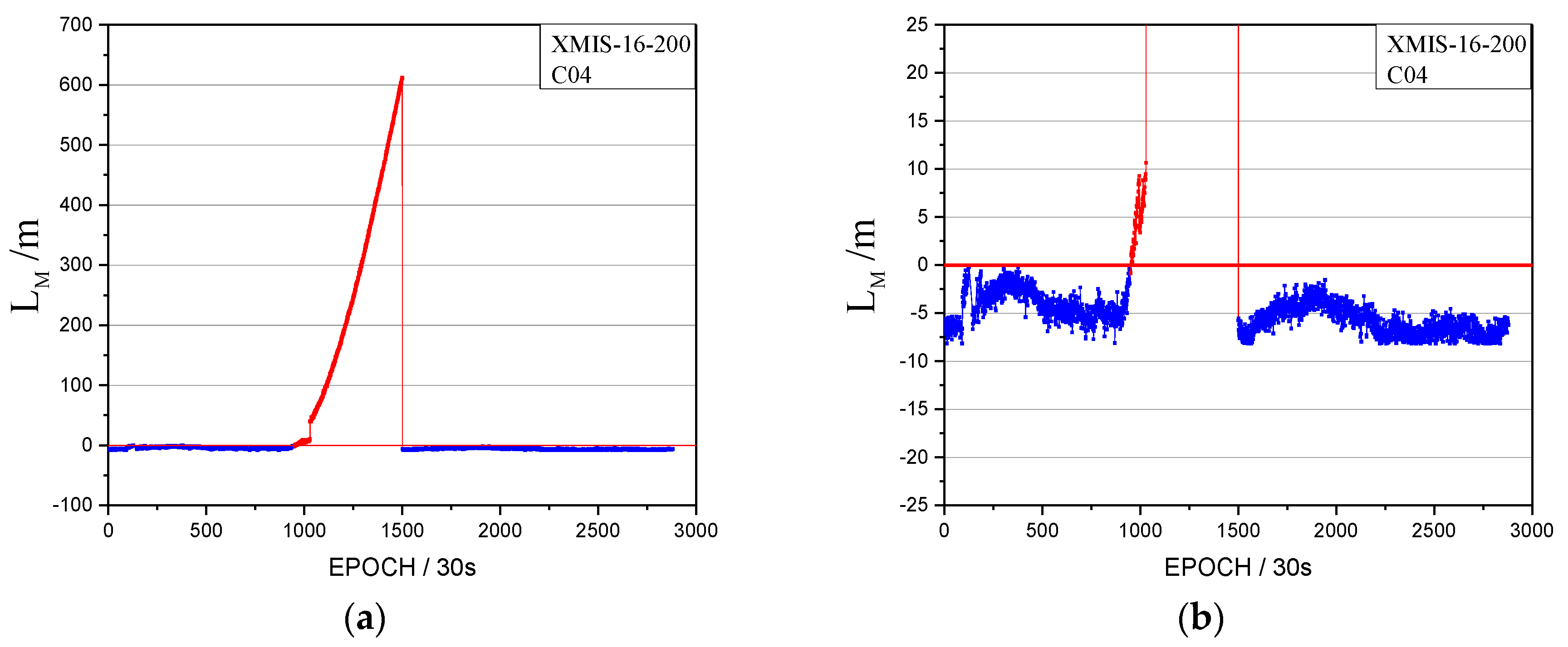
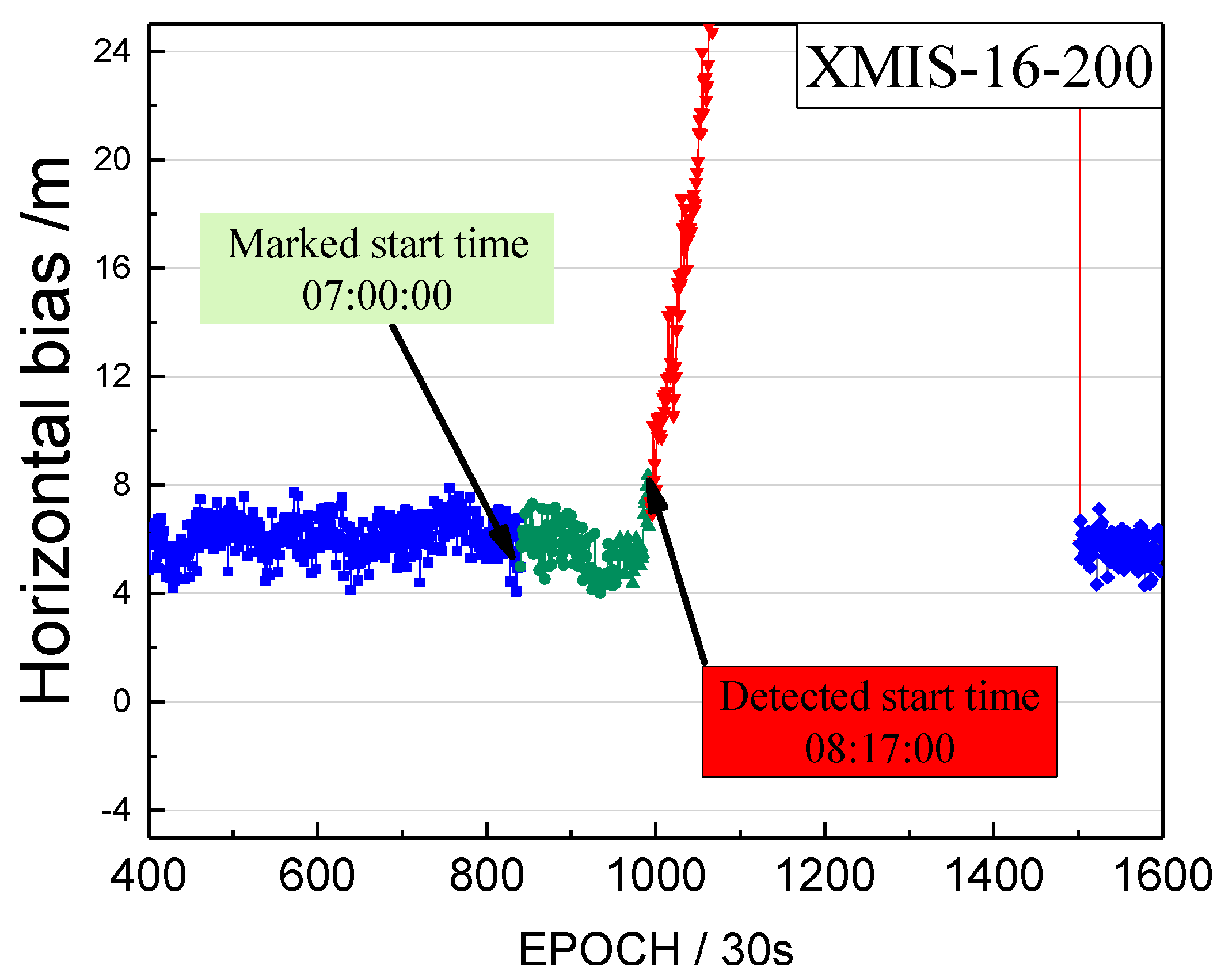
- The real-time is calculated. When the is greater than 0 and shows a sustained growth trend in k epochs, that is, 20 epochs in this study, the first epoch with greater than 0 is considered to be the start time of the orbit maneuver.
- (3)
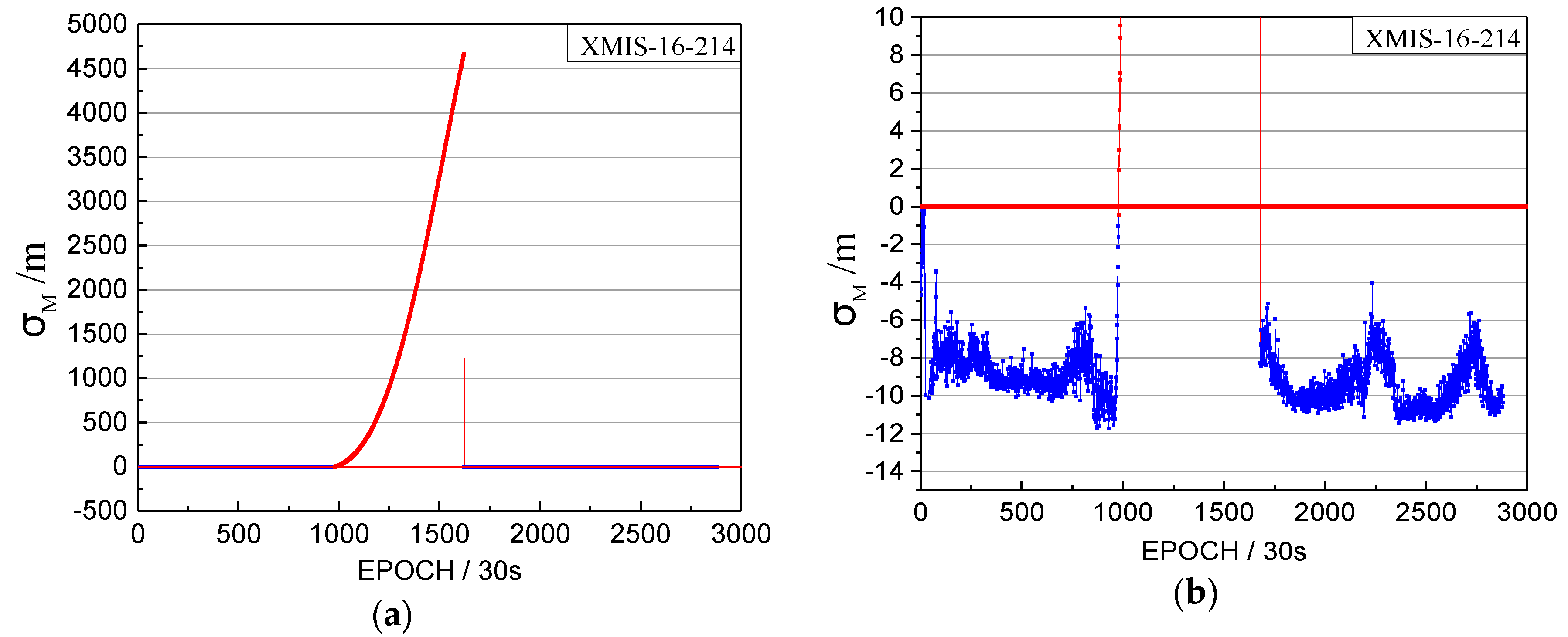
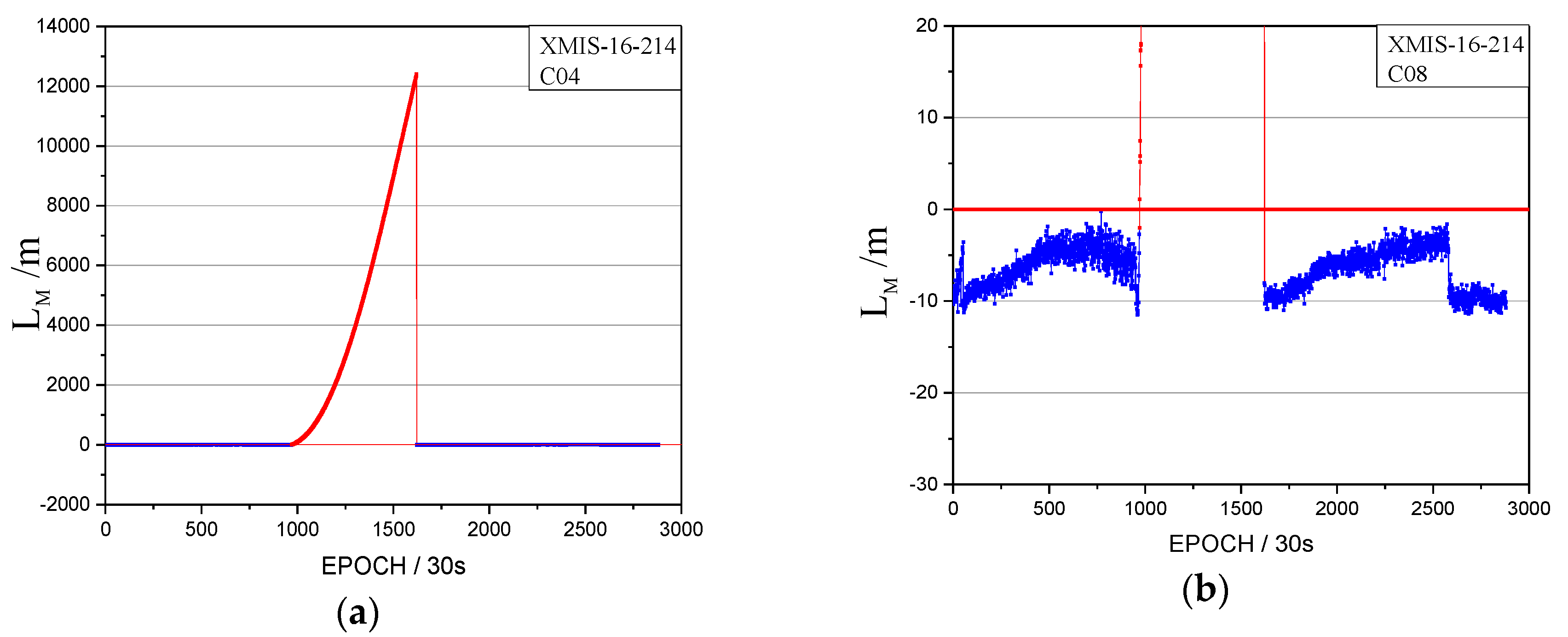
- Once the orbit maneuver is confirmed, the is calculated. If of one satellite is greater than 0 and keeps a sustained growth trend in k epochs, that is, 20 epochs in this study, this satellite is considered to be the maneuvering satellite.
3. Example
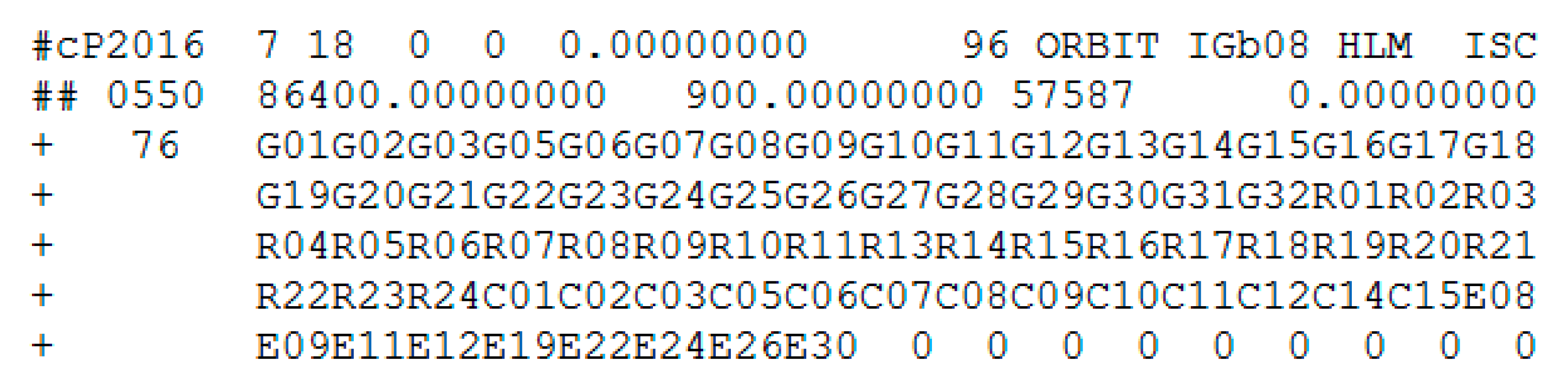
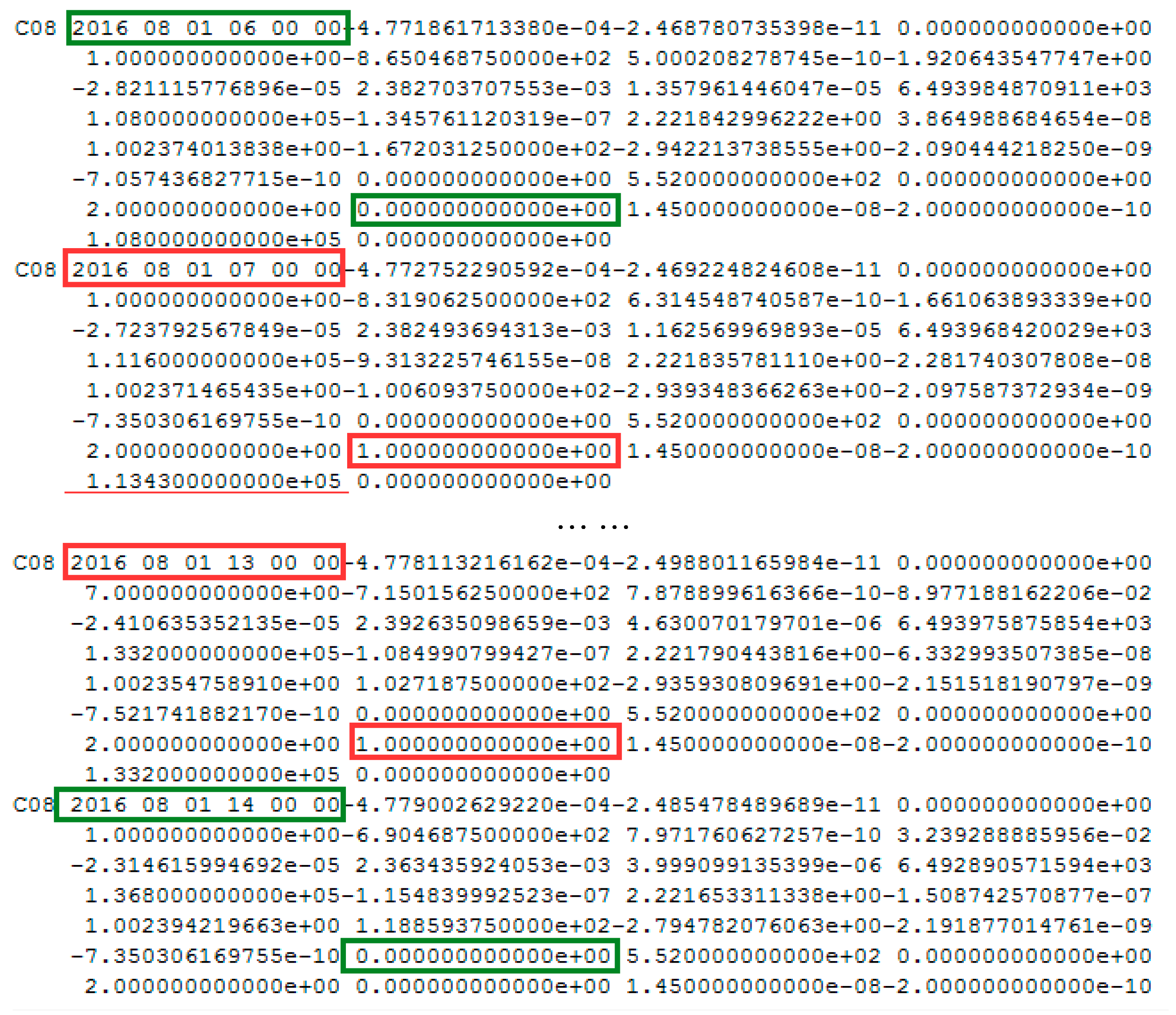
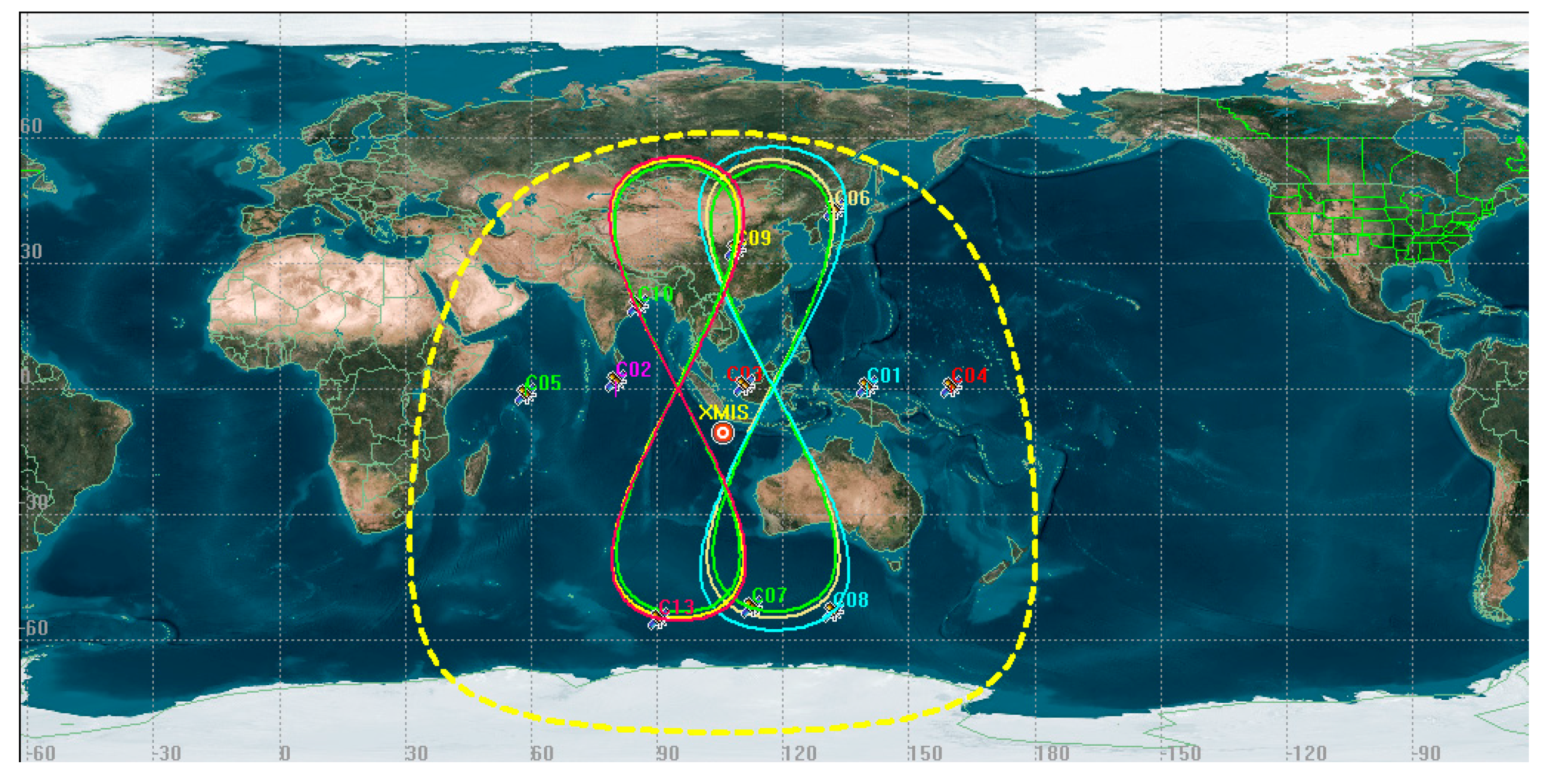
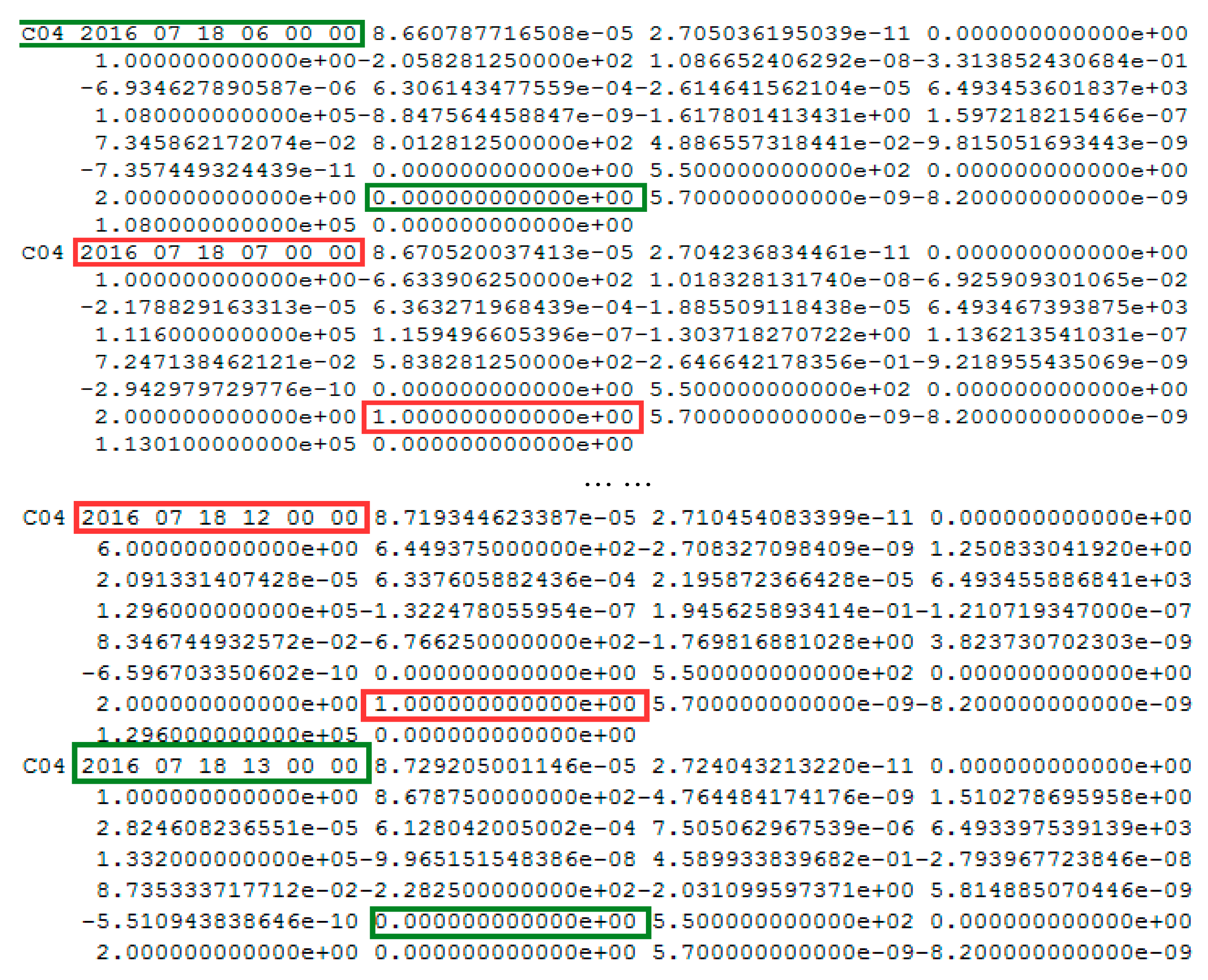
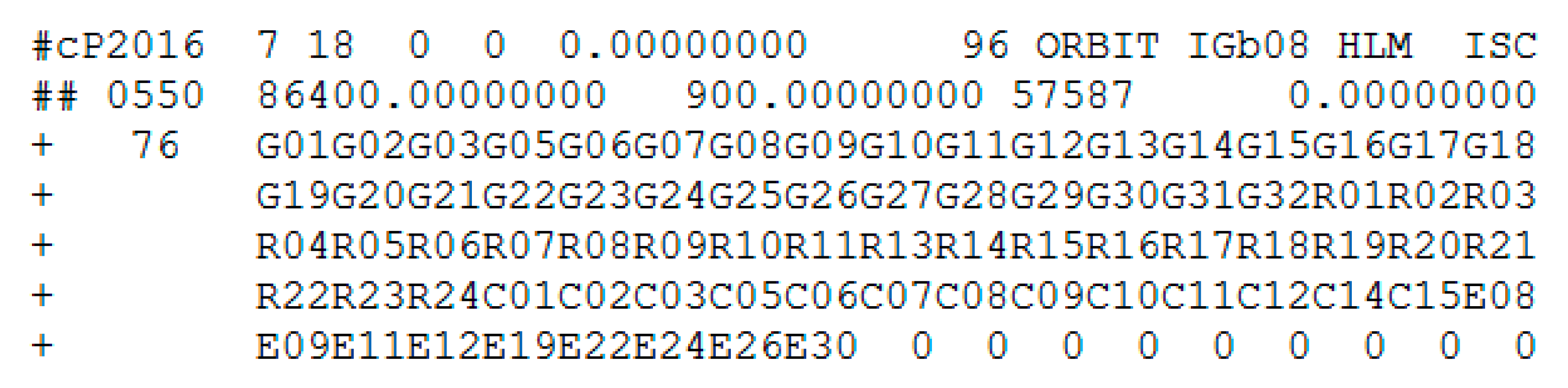
3.1. Data Description
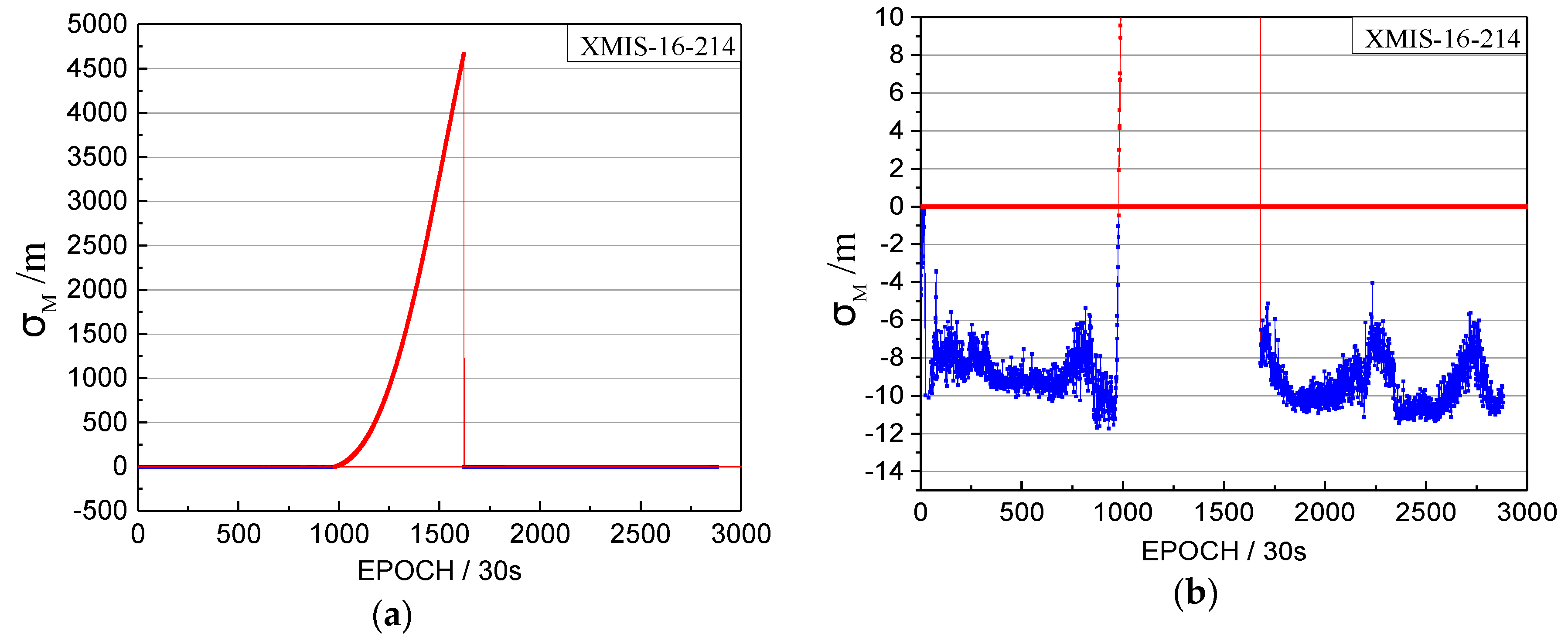
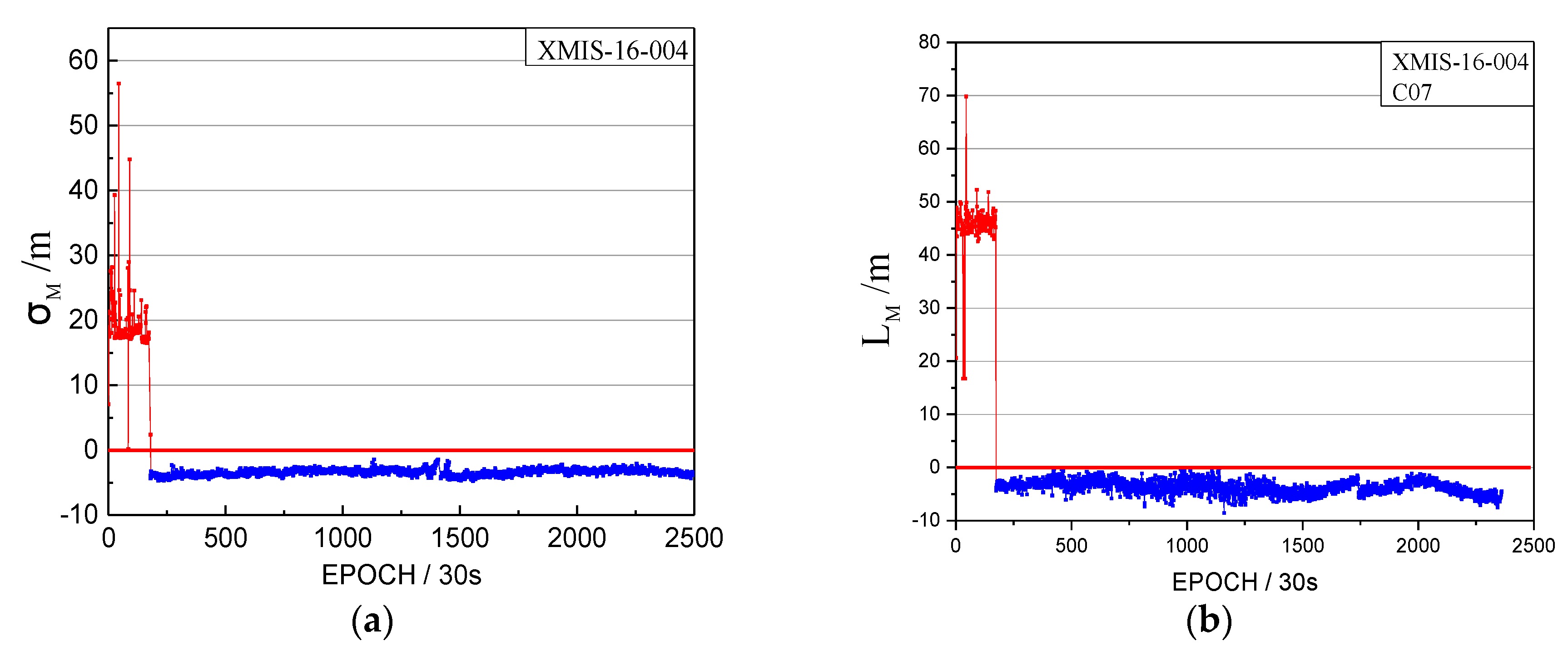
3.2. Orbital Maneuver Detection for GEO
3.3. Orbital Maneuver Detection for IGSO
3.4 Orbital Maneuver Detection for GEO/IGSO in 2016
3.5. Another Application of the Detected Method
3.6. The Application of the Detected Method for other GNSS MEO Constellations
4. Conclusions and Discussion
Acknowledgments
Author Contributions
Conflicts of Interest
References
- Yang, Y.; Li, J.; Xu, J.; Tang, J.; Guo, H.; He, H. Contribution of the compass satellite navigation system to global PNT users. Chin. Sci. Bull. 2011, 56, 2813–2819. [Google Scholar] [CrossRef]
- Jin, S. Preface: BeiDou Navigation Satellite System (BDS)/GNSS+: Recent Progress and New Applications. Adv. Space Res. 2016, 59, 751–752. [Google Scholar] [CrossRef]
- Montenbruck, O.; Hauschild, A.; Steigenberger, P.; Hugentobler, U.; Teunissen, P.; Nakamura, S. Initial assessment of the COMPASS/BeiDou-2 regional navigation satellite system. GPS Solut. 2013, 17, 211–222. [Google Scholar] [CrossRef]
- He, L.; Ge, M.; Wang, J.; Wickert, J.; Schuh, H. Experimental Study on the Precise Orbit Determination of the BeiDou Navigation Satellite System. Sensors 2013, 13, 2911–2928. [Google Scholar] [CrossRef] [PubMed]
- Zhang, R.; Zhang, Q.; Huang, G.; Wang, L.; Qu, W. Impact of tracking station distribution structure on BeiDou satellite orbit determination. Adv. Space Res. 2015, 56, 2177–2187. [Google Scholar] [CrossRef]
- Ge, H.; Li, B.; Ge, M.; Shen, Y.; Harald, S. Improving BeiDou precise orbit determination using observations of onboard MEO satellite receivers. J. Geodesy 2017, 1–14. [Google Scholar] [CrossRef]
- Wang, B.; Lou, Y.; Liu, J.; Zhao, Q.; Su, X. Analysis of BDS satellite clocks in orbit. GPS Solut. 2016, 20, 783–794. [Google Scholar] [CrossRef]
- Shi, C.; Zhao, Q.; Hu, Z.; Liu, J. Precise relative positioning using real tracking and IGSO satellites. GPS Solut. 2013, 17, 103–119. [Google Scholar] [CrossRef]
- Cao, F.; Yang, X.; Li, Z.; Sun, B.; Kong, Y.; Chen, L.; Feng, C. Orbit determination and prediction of GEO satellite of BeiDou during repositioning maneuver. Adv. Space Res. 2014, 54, 1828–1837. [Google Scholar] [CrossRef]
- Zhao, Q.; Wang, C.; Guo, J.; Liu, X. Assessment of the Contribution of BeiDou GEO, IGSO, and MEO Satellites to PPP in Asia—Pacific Region. Sensors 2015, 15, 29970–29983. [Google Scholar] [CrossRef] [PubMed]
- Liu, T.; Yuan, Y.; Zhang, B.; Wang, N.; Tan, B.; Chen, Y. Multi-GNSS precise point positioning (MGPPP) using raw observations. J. Geodesy 2016. [Google Scholar] [CrossRef]
- Steigenberger, P.; Hugentobler, U.; Hauschild, A.; Montenbruck, O. Orbit and clock analysis of Compass GEO and IGSO satellites. J. Geodesy 2013, 87, 515–525. [Google Scholar] [CrossRef]
- Geng, T.; Su, X.; Fang, R.; Xie, X.; Zhao, Q.; Liu, J. BDS Precise Point Positioning for Seismic Displacements Monitoring: Benefit from the High-Rate Satellite Clock Corrections. Sensors 2016, 16, 2192. [Google Scholar] [CrossRef] [PubMed]
- Byun, S.H. Satellite orbit determination using triple-differenced GPS carrier phase in pure kinematic mode. J. Geodesy 2003, 76, 569–585. [Google Scholar] [CrossRef]
- Guo, R.; Chen, J.; Zhu, L.; Tang, G.; Wu, X. Kinematic Orbit Determination Method Optimization and Test Analysis for BDS Satellites with Short-arc Tracking Data. Acta Geod. Cartogr. Sin. 2017, 46, 411–420. [Google Scholar] [CrossRef]
- Li, Z.; Zhang, W.; Gong, X.; Qu, X. Solution of orbit maneuver problem in autonomous orbit determination of navigation satellites. Geomat. Inf. Sci. Wuhan Univ. 2011, 36, 1309–1313. [Google Scholar] [CrossRef]
- Sciré, G.; Santoni, F.; Piergentili, F. Analysis of Orbit Determination for Space Based Optical Space Surveillance System. Adv. Space Res. 2015, 56, 421–428. [Google Scholar] [CrossRef]
- Cui, H.; Liu, W.; Tang, G.; Song, B.; Ge, M. Different Thrust Maneuvers Detection of Uncooperative Space Objects. J. Astronaut. 2016, 37, 253–261. [Google Scholar] [CrossRef]
- Yan, X.; Huang, G.; Zhang, R.; Zhang, Q. A Method Based on Broadcast Ephemeris to Detect BDS Satellite Orbital Maneuver. J. Navig. Position. 2015, 3, 35–38. [Google Scholar]
- Ye, F.; Yuan, Y.; Tan, B.; Jikun, O. A Robust Method to Detect BeiDou Navigation Satellite System Orbit Maneuvering/Anomalies and Its Applications to Precise Orbit Determination. Sensors 2017, 17, 1129. [Google Scholar] [CrossRef] [PubMed]
- Su, J.; Dong, Y. Detection of space target orbit maneuver on board by wavelet analysis. Chin. J. Space Sci. 2012, 32, 412–416. [Google Scholar]
- Du, L.; Zhang, Z.; Li, X.; Wang, R.; Liu, L.; Guo, R. Station-keeping Maneuver Monitoring and Moving-window Ground Track Fitting of GEO Satellites. Acta Geod. Cartogr. Sin. 2014, 43, 233–239. [Google Scholar] [CrossRef]
- Yang, Y.; Song, L.; Xu, T. Robust estimator for correlated observations based on bifactor equivalent weights. J. Geodesy 2002, 76, 353–358. [Google Scholar] [CrossRef]
- Montenbruck, O.; Steigenberger, P.; Khachikyan, R.; Weber, G.; Langley, R.; Mervart, L.; Hugentobler, U. IGS-MGEX: Preparing the ground for multi-constellation GNSS science. Inside GNSS 2014, 9, 42–49. [Google Scholar]





{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Date | The Thresholds of XMIS Station on 18 July 2016. | The Thresholds of XMIS Station on 1 August 2016. | ||||||||
|---|---|---|---|---|---|---|---|---|---|---|
| 9.20 | 9.47 | |||||||||
| C01 * | C02 * | C03 * | C04 * | C05 * | C01 * | C02 * | C03 * | C04 * | C05 * | |
| 7.65 | 6.25 | 4.43 | 8.19 | 7.59 | 8.56 | 6.70 | 4.26 | 11.91 | 8.17 | |
| C06 | C07 | C08 | C09 | C10 | C06 | C07 | C08 | C09 | C10 | |
| 8.24 | 4.73 | 10.79 | 7.06 | 6.72 | 7.96 | 7.22 | 11.78 | 7.58 | 7.75 | |
| C13 | - | - | - | - | C13 | - | - | - | - | |
| 14.69 | - | - | - | - | 15.68 | - | - | - | - | |
| PRN | Doy | Marked Time | Detect Time | Difference | PRN | Doy | Marked Time | Detect Time | Difference |
|---|---|---|---|---|---|---|---|---|---|
| C01 | 9 | 4:00:00 | 5:49:30 | 1:49:30 | C03 | 12 | 7:00:00 | 8:34:30 | 1:34:30 |
| 45 | 4:00:00 | 5:53:30 | 1:53:30 | 40 | 7:00:00 | 8:38:00 | 1:38:00 | ||
| 77 | 4:00:00 | 5:38:30 | 1:38:30 | 67 | 8:00:00 | 9:16:00 | 1:16:00 | ||
| 105 | 9:00:00 | 10:55:00 | 1:55:00 | 92 | 7:00:00 | 9:42:00 | 2:42:00 | ||
| 130 | 3:00:00 | 4:41:00 | 1:41:00 | 116 | 7:00:00 | 8:55:30 | 1:55:30 | ||
| 165 | 4:00:00 | 5:43:30 | 1:43:30 | 144 | 10:00:00 | 11:21:30 | 1:21:30 | ||
| 196 | 4:00:00 | 6:00:00 | 2:00:00 | 158 | 5:00:00 | 4:20:00 | -0:40:00 | ||
| 225 | 11:00:00 | 11:22:00 | 0:22:00 | 159 | 6:00:00 | 7:42:30 | 1:42:30 | ||
| 252 | 10:00:00 | 11:22:00 | 1:22:00 | 183 | 8:00:00 | 9:27:00 | 1:27:00 | ||
| 279 | 9:00:00 | 10:26:00 | 1:26:00 | 211 | 8:00:00 | 9:45:30 | 1:45:30 | ||
| 309 | 7:00:00 | 8:23:30 | 1:23:30 | 238 | 8:00:00 | 9:49:30 | 1:49:30 | ||
| 341 | 4:00:00 | 5:51:30 | 1:51:30 | 265 | 8:00:00 | 9:39:00 | 1:39:00 | ||
| C02 | 33 | 11:00:00 | 12:47:00 | 1:47:00 | 291 | 8:00:00 | 9:38:00 | 1:38:00 | |
| 52 | 17:00:00 | 19:26:00 | 2:26:00 | 319 | 8:00:00 | 9:22:30 | 1:22:30 | ||
| 62 | 0:00:00 | 1:17:30 | 1:17:30 | 348 | 7:00:00 | 8:25:30 | 1:25:30 | ||
| 95 | 13:00:00 | 14:55:30 | 1:55:30 | C04 | 88 | 7:00:00 | 8:53:30 | 1:53:30 | |
| 125 | 6:00:00 | 7:50:00 | 1:50:00 | 119 | 2:00:00 | 3:50:00 | 1:50:00 | ||
| 141 | 9:00:00 | 11:09:30 | 2:09:30 | 200 | 7:00:00 | 8:17:00 | 1:17:00 | ||
| 168 | 0:00:00 | 2:30:30 | 2:30:30 | 273 | 6:00:00 | 8:19:30 | 2:19:30 | ||
| 179 | 2:00:00 | 8:30:00 | 6:30:00 | 312 | 14:00:00 | 15:21:00 | 1:21:00 | ||
| 180 | 5:00:00 | 9:17:30 | 4:17:30 | 313 | 0:00:00 | 1:04:30 | 1:04:30 | ||
| 190 | 0:00:00 | 1:04:30 | 1:04:30 | 7:00:00 | 8:22:30 | 1:22:30 | |||
| 217 | 8:00:00 | 9:51:00 | 1:51:00 | C06 | 134 | 20:00:00 | 21:00:00 | 1:00:00 | |
| 262 | 8:00:00 | 10:22:00 | 2:22:00 | 302 | 6:00:00 | 7:17:00 | 1:17:00 | ||
| 306 | 8:00:00 | 10:08:30 | 2:08:30 | C07 | 138 | 0:00:00 | 0:40:00 | 0:40:00 | |
| 351 | 7:00:00 | 9:47:00 | 2:47:00 | 316 | 9:00:00 | 10:10:00 | 1:10:00 | ||
| C05 | 3 | 0:00:00 | 1:10:30 | 1:10:30 | C08 | 52 | 3:00:00 | 4:37:30 | 1:37:30 |
| 36 | 0:00:00 | 1:11:00 | 1:11:00 | 214 | 7:00:00 | 8:05:00 | 1:05:00 | ||
| 71 | 0:00:00 | 1:09:30 | 1:09:30 | C09 | 28 | 11:00:00 | 11:56:00 | 0:56:00 | |
| 109 | 0:00:00 | 1:24:00 | 1:24:00 | 84 | 23:00:00 | 0:45:30 | 1:45:30 | ||
| 148 | 0:00:00 | 1:04:00 | 1:04:00 | 270 | 8:00:00 | 9:38:30 | 1:38:30 | ||
| 187 | 0:00:00 | 1:09:00 | 1:09:00 | C10 | 172 | 0:00:00 | 1:10:00 | 1:10:00 | |
| 222 | 0:00:00 | 0:53:30 | 0:53:30 | 344 | 10:00:00 | 10:05:00 | 0:05:00 | ||
| 256 | 0:00:00 | 0:47:00 | 0:47:00 | C13 | 229 | 0:00:00 | 1:20:00 | 1:20:00 | |
| 294 | 23:00:00 | 0:00:00 | 1:00:00 | Average time differences between marked and detected | 1:32:12 | ||||
| 333 | 0:00:00 | 0:55:30 | 0:55:30 | ||||||
© 2017 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Huang, G.; Qin, Z.; Zhang, Q.; Wang, L.; Yan, X.; Fan, L.; Wang, X. A Real-Time Robust Method to Detect BeiDou GEO/IGSO Orbital Maneuvers. Sensors 2017, 17, 2761. https://doi.org/10.3390/s17122761
Huang G, Qin Z, Zhang Q, Wang L, Yan X, Fan L, Wang X. A Real-Time Robust Method to Detect BeiDou GEO/IGSO Orbital Maneuvers. Sensors. 2017; 17(12):2761. https://doi.org/10.3390/s17122761
Chicago/Turabian StyleHuang, Guanwen, Zhiwei Qin, Qin Zhang, Le Wang, Xingyuan Yan, Lihong Fan, and Xiaolei Wang. 2017. "A Real-Time Robust Method to Detect BeiDou GEO/IGSO Orbital Maneuvers" Sensors 17, no. 12: 2761. https://doi.org/10.3390/s17122761
APA StyleHuang, G., Qin, Z., Zhang, Q., Wang, L., Yan, X., Fan, L., & Wang, X. (2017). A Real-Time Robust Method to Detect BeiDou GEO/IGSO Orbital Maneuvers. Sensors, 17(12), 2761. https://doi.org/10.3390/s17122761