Marked Object Recognition Multitouch Screen Printed Touchpad for Interactive Applications



 , ,
, , 
Abstract
:
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
1. Introduction
2. Materials and Methods
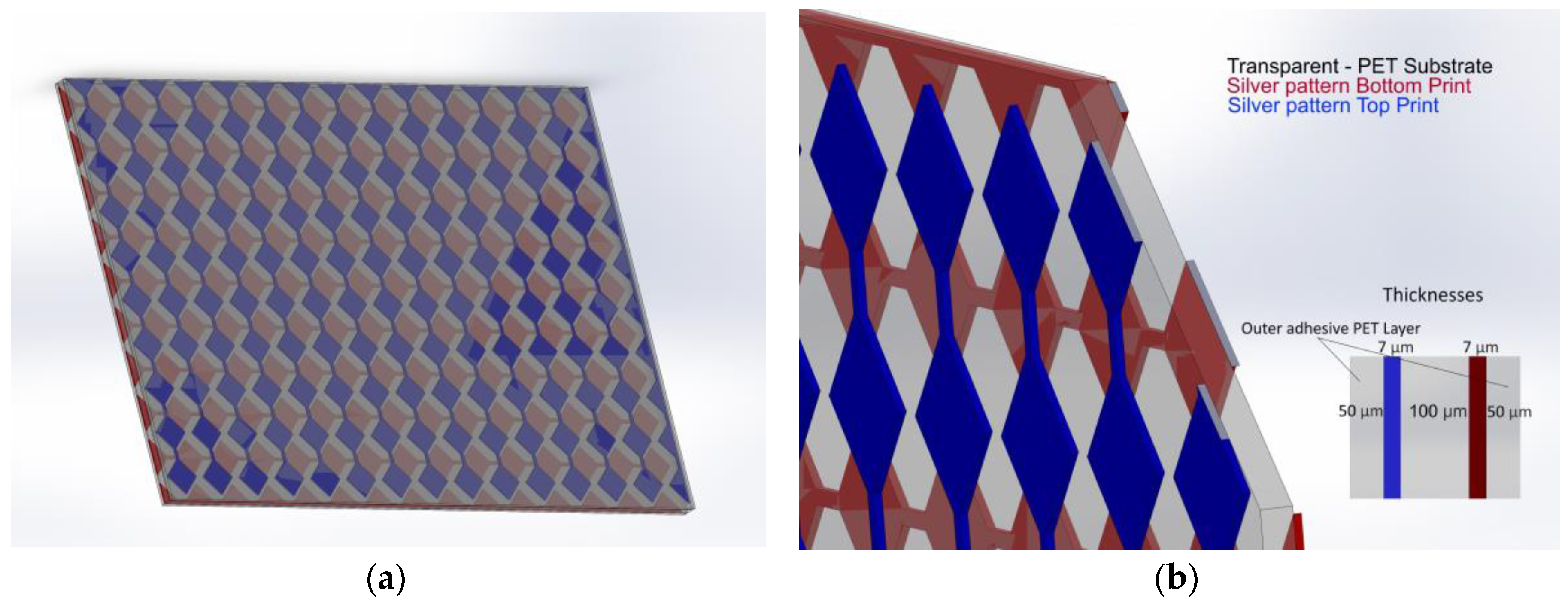
2.1. Printed Geometry
2.2. Capacitive Detection Circuit
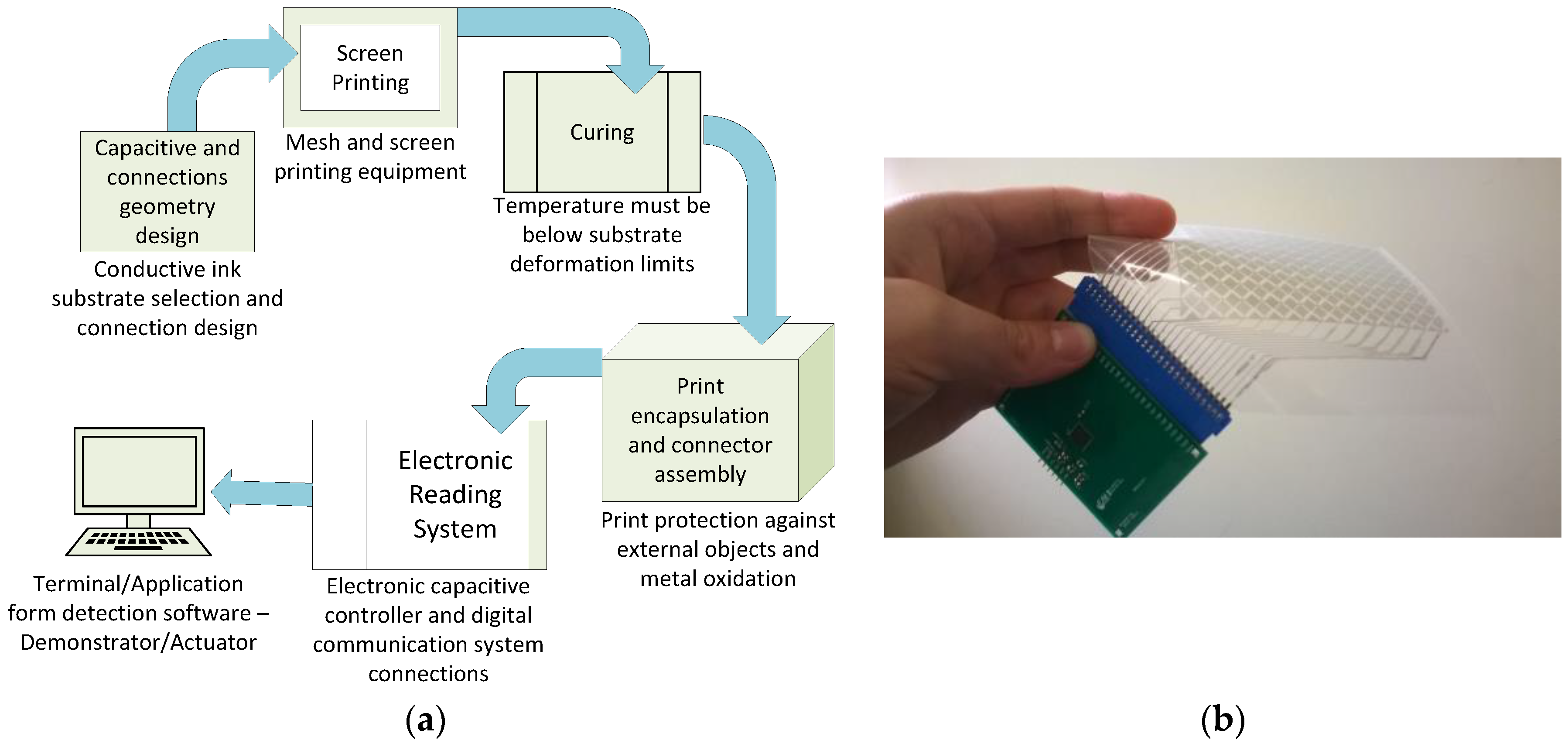
2.3. Touchpad Fabrication
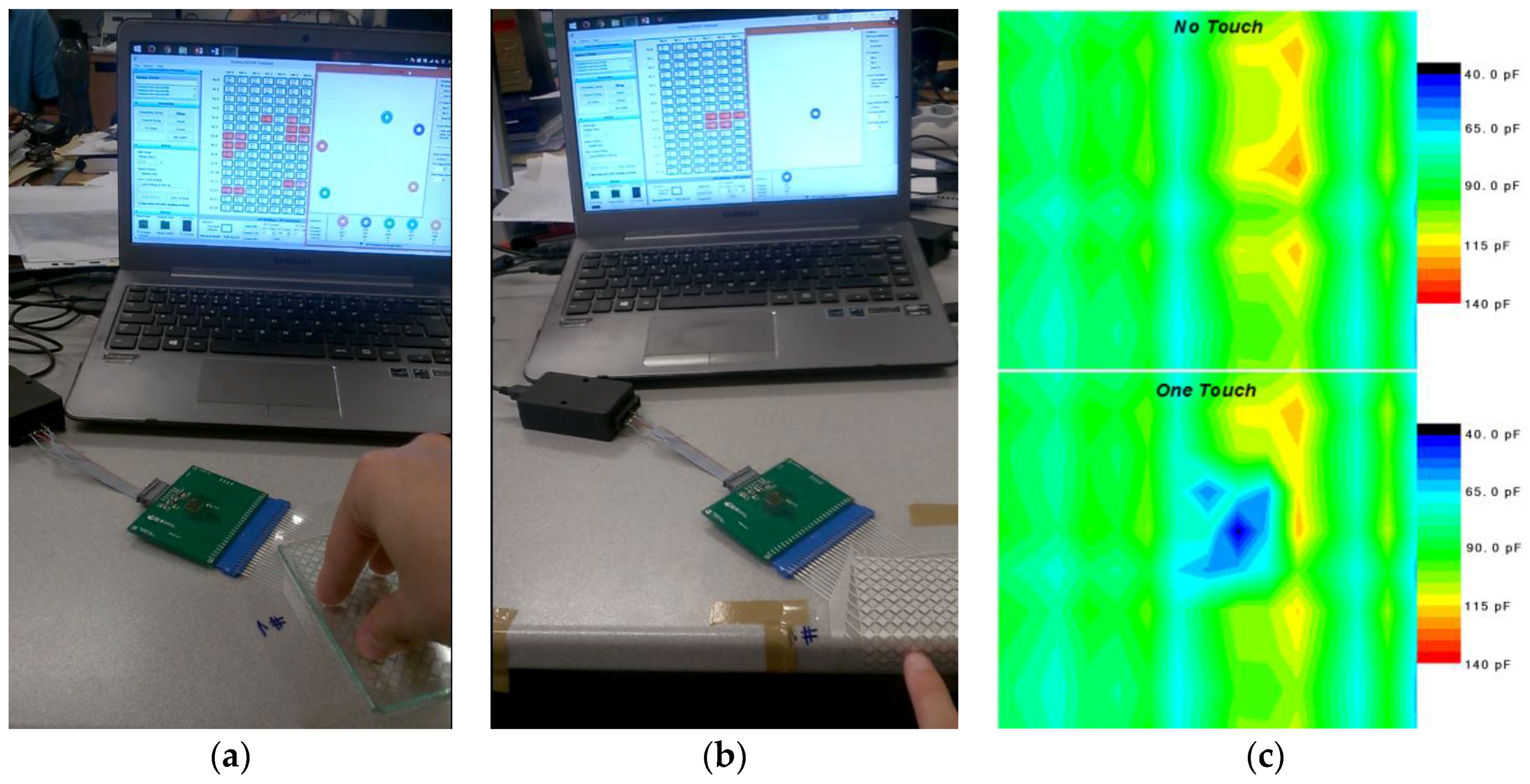
3. Results and Discussion
4. Conclusions
Supplementary Materials
Acknowledgments
Author Contributions
Conflicts of Interest
References
- Ishii, H.; Lakatos, D.; Bonanni, L.; Labrune, J.B. Radical atoms: Beyond tangible bits, toward transformable materials. Interactions 2012, 19, 38–51. [Google Scholar] [CrossRef]
- Coelho, M.; Zigelbaum, J. Shape-changing interfaces. Pers. Ubiquitous Comput. 2011, 15, 161–173. [Google Scholar] [CrossRef]
- Coelho, M.; Maes, P. Shutters: A permeable surface for environmental control and communication. In Proceedings of the 3rd International Conference on Tangible and Embedded Interaction, Cambridge, UK, 16–18 February 2009; ACM: New York, NY, USA. [Google Scholar]
- Coelho, M.; Zigelbaum, J.; Kopin, J. Six-forty by four-eighty: The post-industrial design of computational materials. In Proceedings of the Fifth International Conference on Tangible, Embedded, And Embodied Interaction, Funchal, Portugal, 22–26 January 2011; ACM: New York, NY, USA. [Google Scholar]
- Luo, C.; Borkar, M.A.; Redfern, A.J.; McClellan, J.H. Compressive sensing for sparse touch detection on capacitive touch screens. IEEE J. Emerg. Sel. Top. Circuits Syst. 2012, 2, 639–648. [Google Scholar] [CrossRef]
- Walker, G. A review of technologies for sensing contact location on the surface of a display. J. Soc. Inf. Disp. 2012, 20, 413–440. [Google Scholar] [CrossRef]
- Barrett, G.; Omote, R. Projected-capacitive touch technology. Inf. Disp. 2010, 26, 16–21. [Google Scholar]
- Kim, W.; Oh, H.; Kwak, Y.; Park, K.; Ju, B.K.; Kim, K. Development of a Carbon Nanotube-Based Touchscreen Capable of Multi-Touch and Multi-Force Sensing. Sensors 2015, 15, 28732–28741. [Google Scholar] [CrossRef] [PubMed]
- Ma, S.; Ribeiro, F.; Powell, K.; Lutian, J.; Møller, C.; Large, T.; Holbery, J. Fabrication of Novel Transparent Touch Sensing Device via Drop-on-Demand Inkjet Printing Technique. ACS Appl. Mater. Interfaces 2015, 7, 21628–21633. [Google Scholar] [CrossRef] [PubMed]
- Tung, Y.-C.; Cheng, T.Y.; Yu, N.H.; Chen, M.Y. FlickBoard: Enabling trackpad interaction with automatic mode switching on a capacitive-sensing keyboard. In Proceedings of the Adjunct Publication of the 27th Annual ACM Symposium on User Interface Software and Technology, Honolulu, HI, USA, 5–8 October 2014; ACM: New York, NY, USA. [Google Scholar]
- Choi, S.; Han, J.; Kim, S.; Heo, S.; Lee, G. ThickPad: A hover-tracking touchpad for a laptop. In Proceedings of the 24th Annual ACM Symposium Adjunct on User Interface Software and Technology, Santa Barbara, CA, USA, 16–19 October 2011; ACM: New York, NY, USA. [Google Scholar]
- Valtonen, M.; Vuorela, T.; Kaila, L.; Vanhala, J. Capacitive indoor positioning and contact sensing for activity recognition in smart homes. J. Ambient Intell. Smart Environ. 2012, 4, 305–334. [Google Scholar]
- Grosse-Puppendahl, T.; Braun, A.; Kamieth, F.; Kuijper, A. Swiss-cheese extended: An object recognition method for ubiquitous interfaces based on capacitive proximity sensing. In Proceedings of the SIGCHI Conference on Human Factors in Computing Systems, Paris, France, 27 April–2 May 2013; ACM: New York, NY, USA. [Google Scholar]
- Kaneswaran, K.; Arshak, K. Capacitive Interfaces for Navigation of Electric Powered Wheelchairs. In 13th International Conference on Biomedical Engineering; Springer: Berlin/Heidelberg, Germany, 2009. [Google Scholar]
- Tian, L.; Song, A.; Chen, D. Image-based haptic display via a novel pen-shaped haptic device on touch screens. Multimedia Tools Appl. 2017, 76, 14969–14992. [Google Scholar] [CrossRef]
- Rivadeneyra, A.; Salmerón, J.F.; Palma, A.J.; López-Villanueva, J.A.; Agudo-Acemel, M.; Capitan-Vallvey, L.F. Comparative study of printed capacitive sensors. In Proceedings of the 2015 IEEE 10th Spanish Conference on Electron Devices (CDE), Madrid, Spain, 11–13 February 2015. [Google Scholar]
- Molina-Lopez, F.; Briand, D.; De Rooij, N. All additive inkjet printed humidity sensors on plastic substrate. Sens. Actuators B Chem. 2012, 166, 212–222. [Google Scholar] [CrossRef]
- Song, A.; Han, Y.; Hu, H.; Li, J. A novel texture sensor for fabric texture measurement and classification. IEEE Trans. Instrum. Meas. 2014, 63, 1739–1747. [Google Scholar] [CrossRef]
- Reis, S.; Castro, N.; Silva, M.P.; Correia, V.; Rocha, J.G.; Martins, P.; Lanceros-Mendez, S. Fabrication and Characterization of High-Performance Polymer-Based Magnetoelectric DC Magnetic Field Sensors Devices. IEEE Trans. Ind. Electron. 2017, 64, 4928–4934. [Google Scholar] [CrossRef]
- Briand, D.; Oprea, A.; Courbat, J.; Bârsan, N. Making environmental sensors on plastic foil. Mater. Today 2011, 14, 416–423. [Google Scholar] [CrossRef]
- Reis, S.; Silva, M.P.; Castro, N.; Correia, V.; Gutierrez, J.; Lasheras, A.; Lanceros-Mendez, S.; Martins, P. Optimized anisotropic magnetoelectric response of Fe61.6Co16.4Si10.8B11.2/PVDF/Fe61.6Co16.4Si10.8B11.2 laminates for AC/DC magnetic field sensing. Smart Mater. Struct. 2016, 25, 055050. [Google Scholar] [CrossRef]
- Reis, S.; Silva, M.P.; Castro, N.; Correia, V.; Martins, P.; Lasheras, A.; Gutierrez, J.; Barandiarán, J.M.; Rocha, J.G.; Lanceros-Mendez, S. Characterization of Metglas/poly (vinylidene fluoride)/Metglas magnetoelectric laminates for AC/DC magnetic sensor applications. Mater. Des. 2016, 92, 906–910. [Google Scholar] [CrossRef]
- Martins, P.; Lopes, A.; Lanceros-Mendez, S. Electroactive phases of poly (vinylidene fluoride): Determination, processing and applications. Prog. Polym. Sci. 2014, 39, 683–706. [Google Scholar] [CrossRef]
- Akhtar, H.; Kakarala, R. A methodology for evaluating accuracy of capacitive touch sensing grid patterns. J. Disp. Technol. 2014, 10, 672–682. [Google Scholar] [CrossRef]
- Bouman, C.A.; Kakarala, R. Capacitive touch sensing: Signal and image processing algorithms. 2011, 7873, 78730H. [Google Scholar]
- Hwang, T.-H.; Cui, W.H.; Yang, I.S.; Kwon, O.K. A highly area-efficient controller for capacitive touch screen panel systems. IEEE Trans. Consum. Electron. 2010, 56, 1115–1122. [Google Scholar] [CrossRef]
- Marioli, D.; Sardini, E.; Taroni, A. Measurement of small capacitance variations. In Proceedings of the IEEE CPEM’90 Digest. Conference on Precision Electromagnetic Measurements, Ottawa, ON, Canada, 11–14 June 1990. [Google Scholar]
- Baglio, S.; Castorina, S.; Ganci, G.; Savalli, N. A high sensitivity conditioning circuit for capacitive sensors including stray effects compensation and dummy sensors approach. In Proceedings of the 21st IEEE Instrumentation and Measurement Technology Conference (IMTC), Como, Italy, 18–20 May 2004. [Google Scholar]
- Pintér, Á.; Dénes, I. Interface circuit for measuring small capacitance changes in sensor networks. IET Sci. Meas. Technol. IET 2015, 9, 570–578. [Google Scholar] [CrossRef]
- Yang, C.; Mason, A.; Xi, J.; Zhong, P. Configurable Hardware-Efficient Interface Circuit for Multi-Sensor Microsystems. In Proceedings of the 5th IEEE Conference on Sensors, Daegu, Korea, 22–25 October 2006. [Google Scholar]





© 2017 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Nunes, J.S.; Castro, N.; Gonçalves, S.; Pereira, N.; Correia, V.; Lanceros-Mendez, S. Marked Object Recognition Multitouch Screen Printed Touchpad for Interactive Applications. Sensors 2017, 17, 2786. https://doi.org/10.3390/s17122786
Nunes JS, Castro N, Gonçalves S, Pereira N, Correia V, Lanceros-Mendez S. Marked Object Recognition Multitouch Screen Printed Touchpad for Interactive Applications. Sensors. 2017; 17(12):2786. https://doi.org/10.3390/s17122786
Chicago/Turabian StyleNunes, Jivago Serrado, Nelson Castro, Sergio Gonçalves, Nélson Pereira, Vitor Correia, and Senentxu Lanceros-Mendez. 2017. "Marked Object Recognition Multitouch Screen Printed Touchpad for Interactive Applications" Sensors 17, no. 12: 2786. https://doi.org/10.3390/s17122786
APA StyleNunes, J. S., Castro, N., Gonçalves, S., Pereira, N., Correia, V., & Lanceros-Mendez, S. (2017). Marked Object Recognition Multitouch Screen Printed Touchpad for Interactive Applications. Sensors, 17(12), 2786. https://doi.org/10.3390/s17122786