Due to the above errors, there is a deviation in the absolute positioning of SAR. In practice, the control point can be used to improve the positioning accuracy of each scene image, but this method requires many control points [
23,
24]. Through the analysis of the previous section, we know that the azimuth time synchronization error and the internal electronic delay of the instrument that affect the positioning accuracy are relatively stable and will not change over time. Therefore, to improve the absolute positioning accuracy, we can calibrate the geometric calibration parameters of the image (internal delay and azimuth shifts) using high-precision ground control data. The classical geometric calibration schemes all take into account the ascending and descending modes, left and right side looks, and different beam positions. However, these considerations are not the main factors that affect the calibration parameters of the physical properties of the SAR signal. In addition, the current spaceborne SAR systems have dozens or even hundreds of beam positions. It is not realistic to calibrate every beam position. Take into account the cause of the positioning error, it is reasonable to adopt different imaging mode schemes for high-precision geometric calibration [
13].
3.1. Conventional Field Calibration
It is assumed that the system azimuth time synchronization error is
and the system internal delay is
. In addition, considering the atmospheric delay
, Equations (3) and (4) can be written as Equation (7):
The geometric calibration model for space-borne SAR can be expressed as follows [
25]:
The error equation for Equation (8) is as follows:
where
;
; and
.
and
mean the deviation between the observed value and the calculated value of range and azimuth pixel coordinate of the target in the image, respectively.
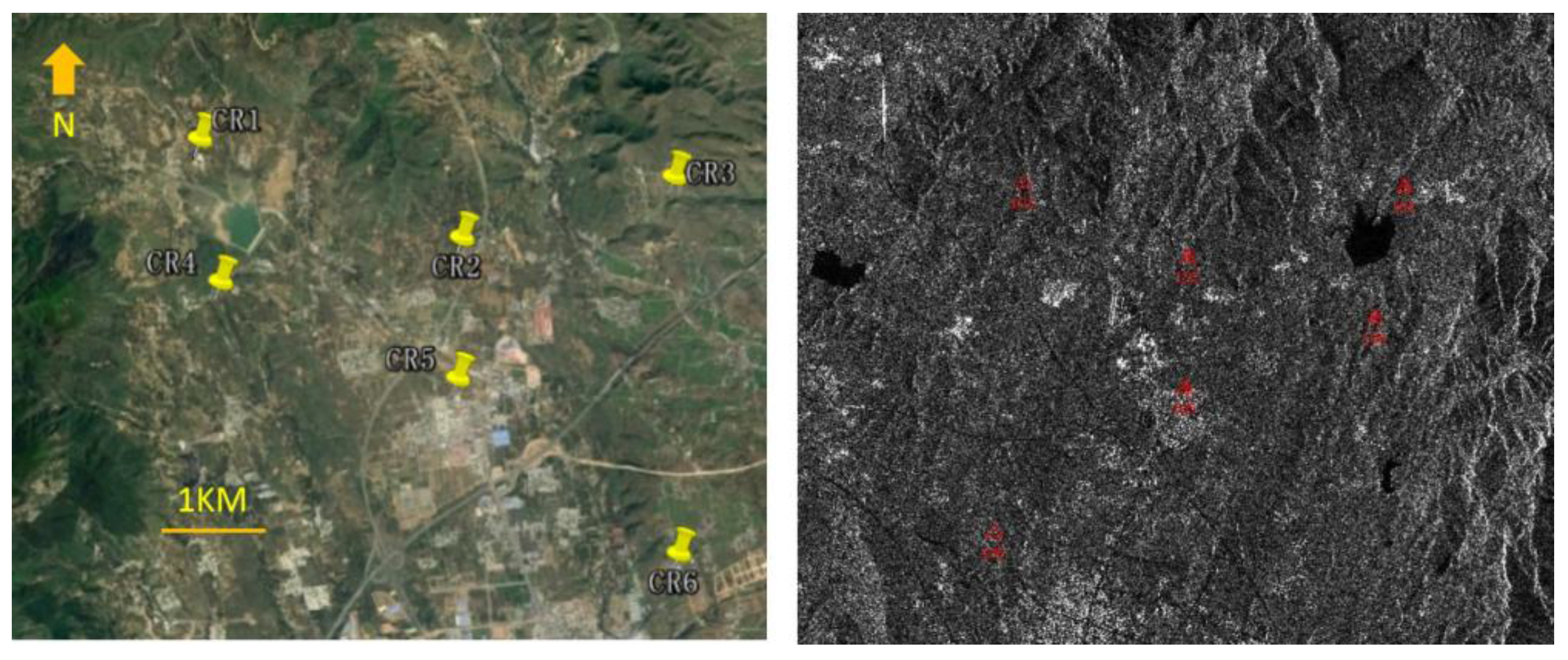
The steps of conventional field calibration are as follows:
Mount the corner reflectors in the calibration field area, obtain ground positions (xt,yt,zt) of the corner reflectors, and acquire calibration field images.
Extract the accurate image coordinates (
i,j) of the corner reflectors, and calculate
R and
ηp and by using the inverse location algorithm [
26] according to Equation (1).
Calculate the atmospheric propagation delay, and calculate the correction values for the atmospheric propagation delay according to the National Centers for Environmental Prediction global atmospheric parameters, updated every 6 h, and the global vertical total electron content data provided by the Center for Orbit Determination in Europe.
Obtain accurate values of by applying Equations (7) and (8).
3.2. Cross-Calibration
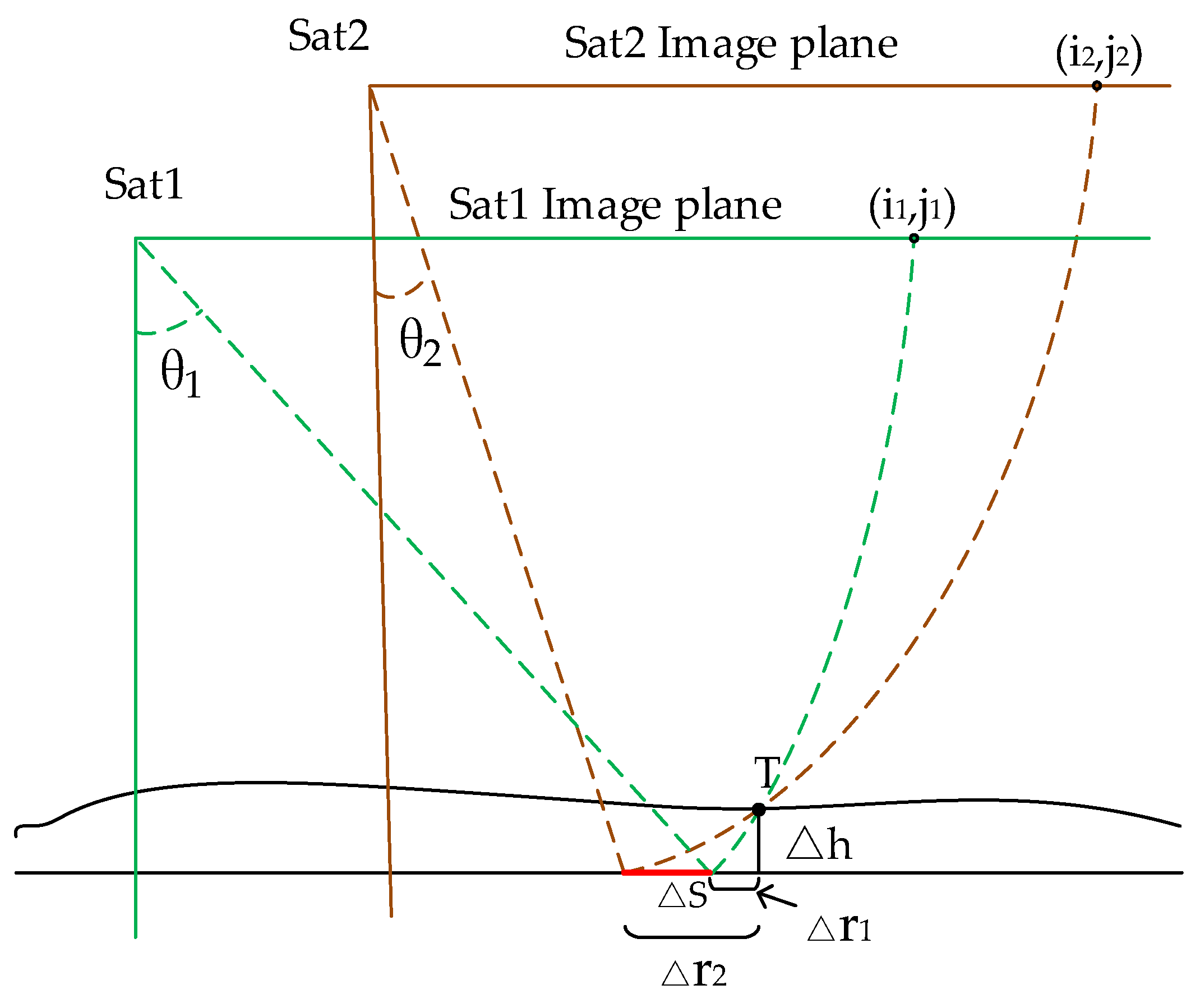
As shown in
Figure 3, satellites Sat1 and Sat2 imaged the same ground point, T, at (
i1,j1) and (
i2,j2) on the Sat1 and Sat2 image plane, respectively.
Assuming that the geolocation parameters of Sat1 and Sat2 (including measuring track, slant range, and Doppler parameters) are accurate and the elevation of T is correct according to the geometric positioning model, the conjugate points (i1,j1) and (i2,j2) should be positioned at the same location T by an indirect localization algorithm of the range-Doppler location model. However, it is often difficult to locate (i1,j1) and (i2,j2) at the same point on the ground when utilizing satellite data. This is caused by the geolocation error and stereoscopy errors induced by the elevation error of the ground object T.
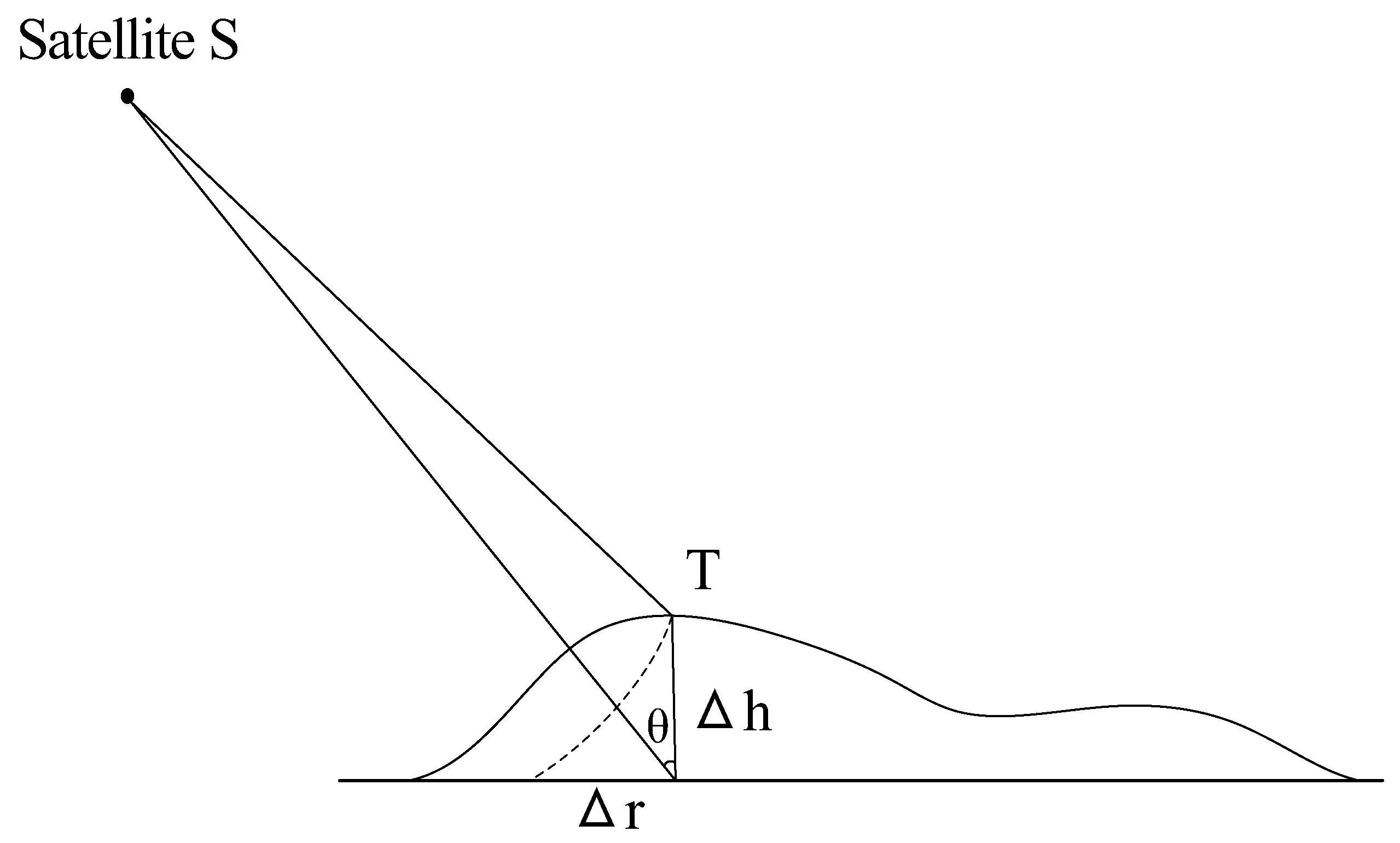
Based on the features of SAR side-look imaging, the deviation Δ
S in
Figure 3 caused by the elevation error can be calculated as follows:
where
θ1 and
θ2 denote the incidence angles of (
i1,j1) and (
i2,j2), respectively; and Δ
h is the elevation error of T, which depends on the topographic data adopted for geometric positioning (e.g., global open Shuttle Radar Topography Mission (SRTM) data). Based on Equation (10), when
θ1 and
θ2 are close enough (i.e., the two satellites scan one region with similar incidence angles), the deviation Δ
S caused by the elevation error, can be neglected. In that case, Δ
S is only caused by the geolocation parameter error and can be calculated using the following equation:
where
fsat1 and
fsat2 denote the geolocation parameter errors of Sat1 and Sat2, respectively. If the geolocation accuracy of Sat1 is very accurate (i.e.,
fsat1(
i1,j1) = 0), Equation (11) can be written as follows:
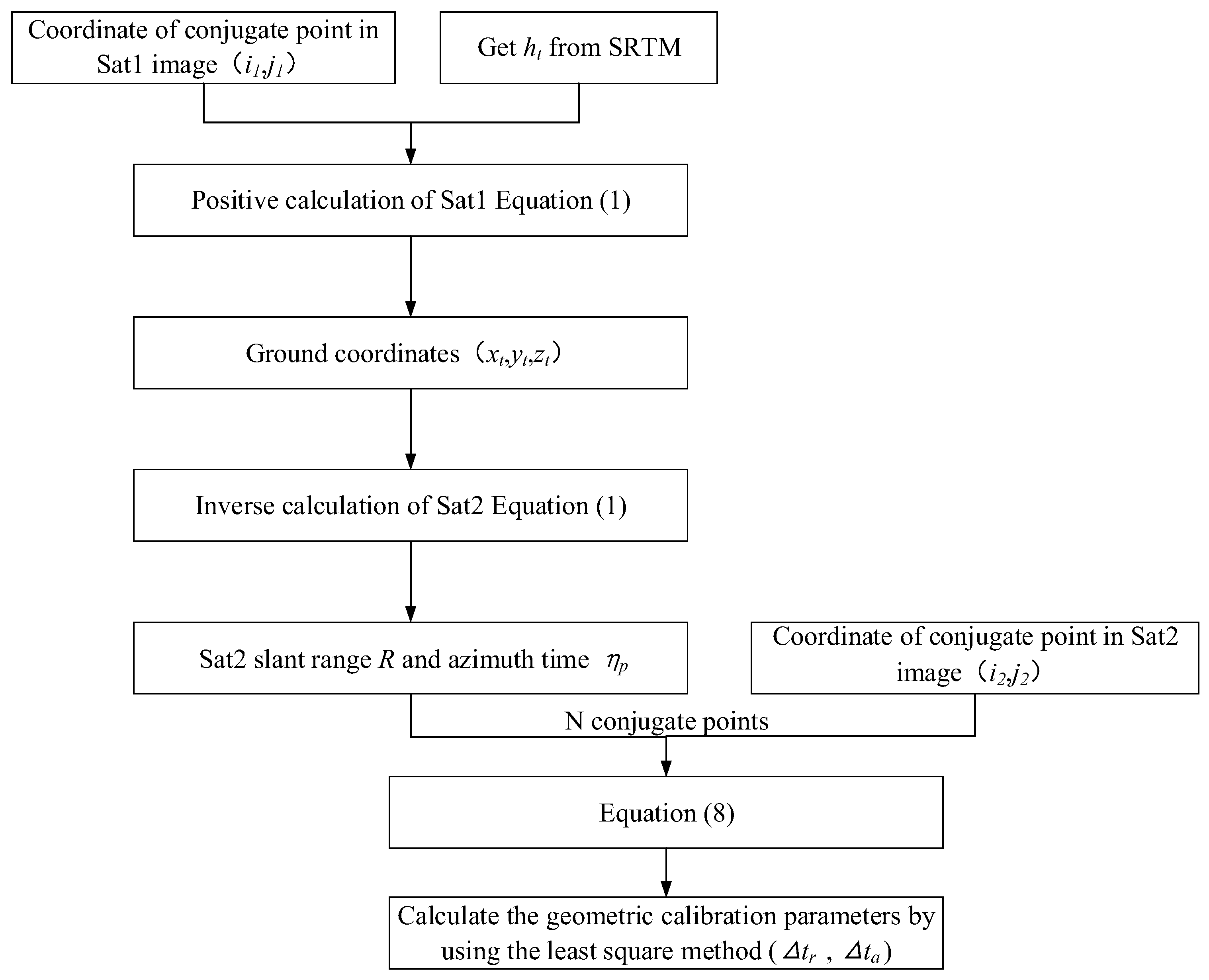
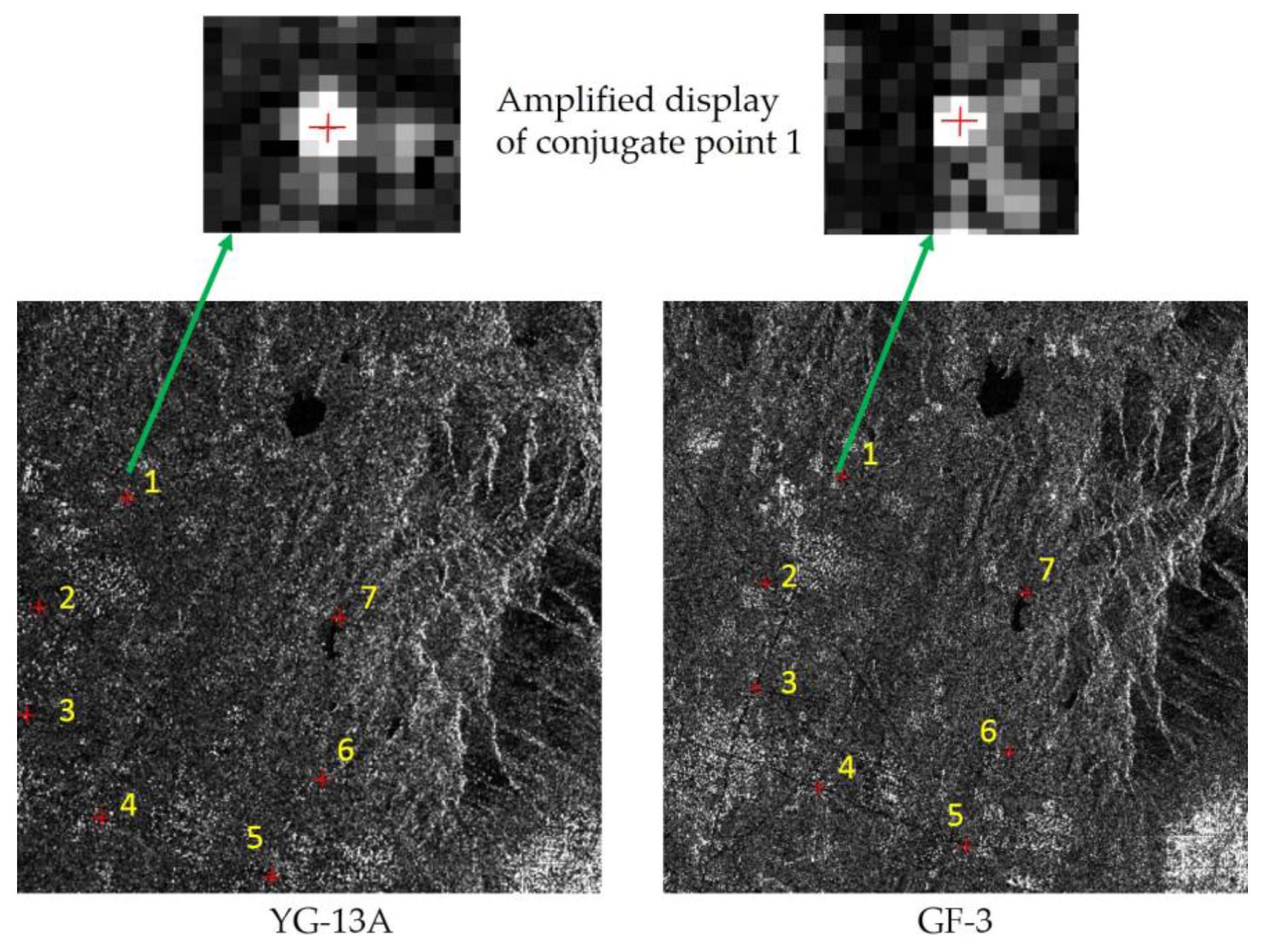
As shown in
Figure 4, assuming that the geolocation accuracy of Sat1 is very accurate, the conjugate points (
i1,j1) and (
i2,j2) can be acquired by matching Sat1 and Sat2 satellite images and calculating the ground coordinates (
xt,yt,zt) corresponding to (
i1,j1) in Sat1, using the Sat1 range-Doppler model and the SRTM-DEM.
Subsequently, (xt,yt,zt) can be substituted into the Sat2 range-Doppler model, and R and ηp can be obtained when the ground target is imaged by Sat2. Thereafter, R, ηp and (i2,j2) can be substituted into the geometric calibration model (Equation (8)), and the internal electronic delay of the instrument (Δtr) and the systematic azimuth shifts (Δta) of Sat2 can be calculated.
From the above analysis, it is clear that the cross-calibration method is consistent with the conventional field calibration. The difference is that the control point acquisition method used to solve the calibration equation is not the same. The conventional field calibration uses the ground coordinates of corner reflectors (xt,yt,zt) and their image plane coordinates (i,j) to solve Equation (8). The cross-calibration method only needs a cross-calibration image pair with similar incidence angles, as the reference image of the cross-calibration image pair provides high-precision plane control data. Furthermore, the requirement of high-precision DEM data is eliminated by the limited condition of similar incidence angles for the cross-calibration image pair. When the reference data is well calibrated, the absolute error of the image to be calibrated can be obtained. Otherwise, only the relative error can be obtained.










{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}