1. Introduction
Many industrial processes generate waste heat as a byproduct. A typical method for dissipating the heat is known as once through water-cooling, where water is drawn in from a nearby water source (lake, rive, etc.), passed through a heat exchanger, and discharged back into the water source. This process produces a thermal discharge into the water, creating a thermal plume which can be several degrees Kelvin warmer than the original water temperature. The impact of these plumes on the environment was a factor in the development of regulations for waste heat discharges by the Environmental Protection Agency (EPA). In 1972, the Federal Water Pollution Control Act of 1948 became what is currently referred to as the Clean Water Act (CWA). The CWA revisions made it unlawful to discharge any pollutant from a point source into navigable US waters without a permit [
1]. Similar effluent limitations were also placed on thermal discharges from all industrial activities with the goal of protecting aquatic environments.
To address the aforementioned effluent regulations, power plant operators or environmental consultant companies periodically characterize the effluent thermal plumes and examine their impact. Currently, the typical procedure is to pilot small boats, e.g., with two-person crews, through the discharge area. The boats tow thermistors behind them to determine the extent of the plume and establish locations for full-depth temperature readings. At desired locations, full-depth readings are taken by dropping specialized sensors (e.g., Conductivity, Temperature, Depth (CTD) sensors) downward through the water column and recording the data as a function of depth. Data collection with such methods can take a day or more to complete and can be time and labor intensive. More fundamentally, because some of the discharges are near moving water or tidal areas, the plume can change shape, location, and temperature during the measurement period, thereby giving results that may be time dependent. Practical impediments, such as the lack of boat ramps at suitable locations, can also complicate the use of a boat. The use of autonomous boats or submarines may be of interest in the future but these technologies are still under development (e.g., [
2]), do not readily allow large field of view imaging (as is useful in this application), and their use would still require shoreline access for launch and recovery of the craft.
The limitations of the existing methods along with the rapid emergence (and regulatory acceptance) of unmanned aerial systems (UAS) are opening the possibility of new measurement paradigms. A UAS water temperature measurement system was conceptually developed by Alden Research Laboratory, Inc. (Fort Collins, CO, USA). Working with a team of Colorado State University mechanical engineering students and their faculty advisor, the concept for field measurements of thermal discharges into water was developed into an operational prototype system. The UAS platforms have the potential to access thermal plumes with temperature sensors without requiring nearby shoreline or boat access. Furthermore, the UAS platforms can be equipped with various imaging modalities, and with global positions systems (GPS), such that data can be geo-referenced. Potential advantages of the UAS approach include the ability to make measurements more quickly (lower cost), with better spatial and/or temporal resolution, with greater reliability (e.g., if a plume can be characterized over a shorter time scale), and in a manner that provides access to more diverse bodies of water and flow types (e.g., those where boat access is very challenging). Where boat access is readily available, the UAS data can augment the understanding of the boat collected data with a surface image of the plume (and additional depth profiles).
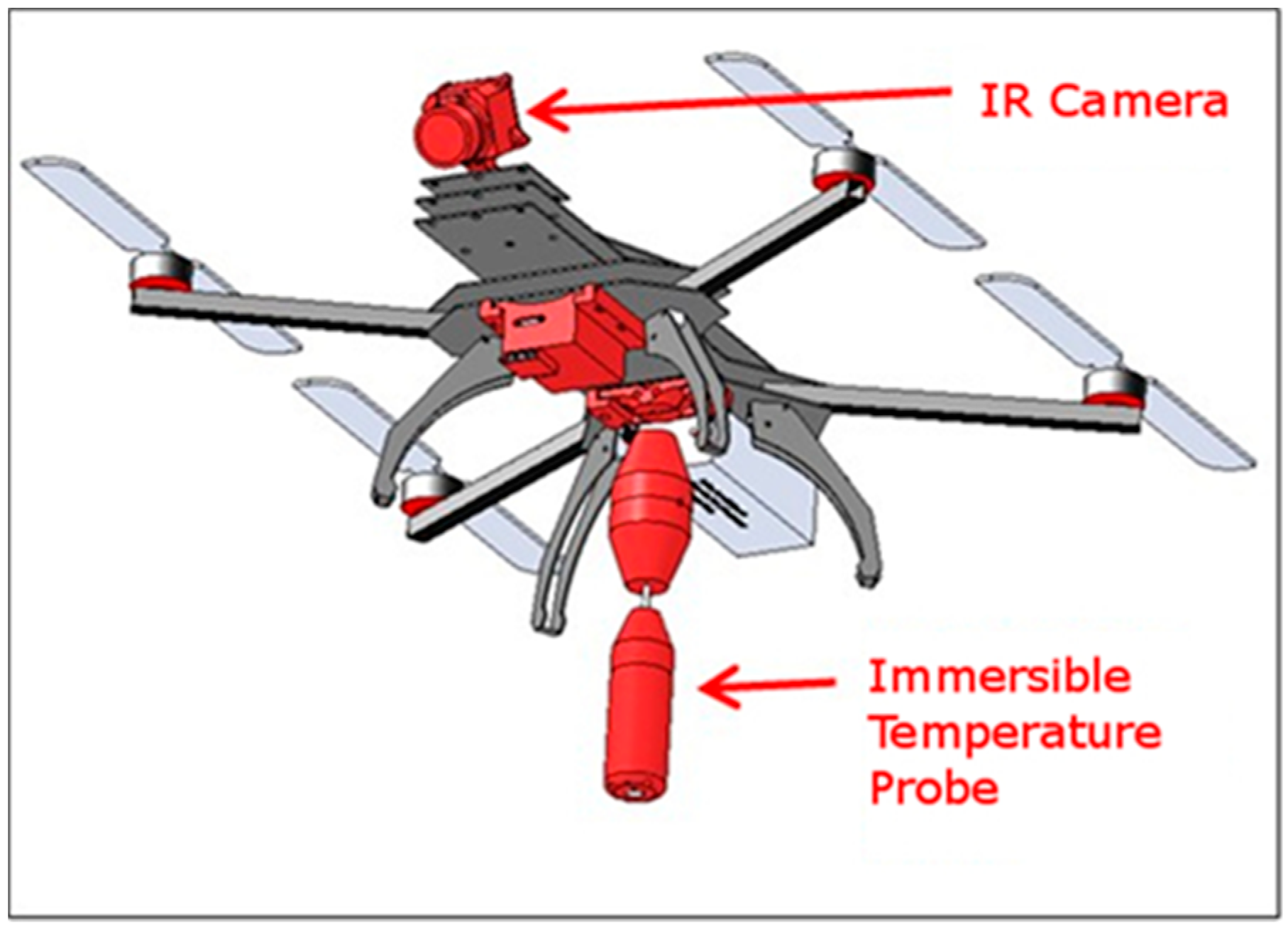
The present contribution represents the first simultaneous integration of both an infrared (IR) camera and an immersible temperature probe to a UAS, thereby providing a powerful new capability for measuring and visualizing the temperature of water plumes over relatively large spatial scales (~100 m–kms). Several other groups are developing UAS systems for water resource monitoring (e.g., [
3]) but without this simultaneous capability. The use of a UAS to image water surface temperature, but not depth profiles, has been demonstrated by several researchers [
4,
5,
6]; while these approaches are useful, they do not provide the spatial temperature (depth) information needed for the study of thermal effluent streams. One research team has shown the ability to obtain water samples from a UAS platform for subsequent laboratory analysis [
7]. Returned samples are useful for chemical or biological analyses but not for in situ temperature determination. The authors are aware of only one other study where an immersible probe has been used to record temperature profiles, which is the recent work of Chung et al. [
8]. The system from Chung et al. is oriented towards characterizing temperature fields over smaller spatial scales (~10 m) in lakes or other bodies of water. In contrast to past published efforts, our simultaneous use of both large field of view (FOV) IR imaging and an immersible temperature probe, both integrated to a higher capacity UAS, allows the geo-location of thermal plumes and the collection of temperature profiles over large spatial scales.
The present contribution summarizes the development, validation, and testing of a UAS based temperature imaging system for thermal plumes. The layout of the remainder of the paper is as follows.
Section 2 describes the UAS platform and sensor subsystem designs and integration,
Section 3 describes the component test results as well as the initial field measurements in the thermal effluent of a power plant, and
Section 4 presents the research conclusions.
4. Conclusions
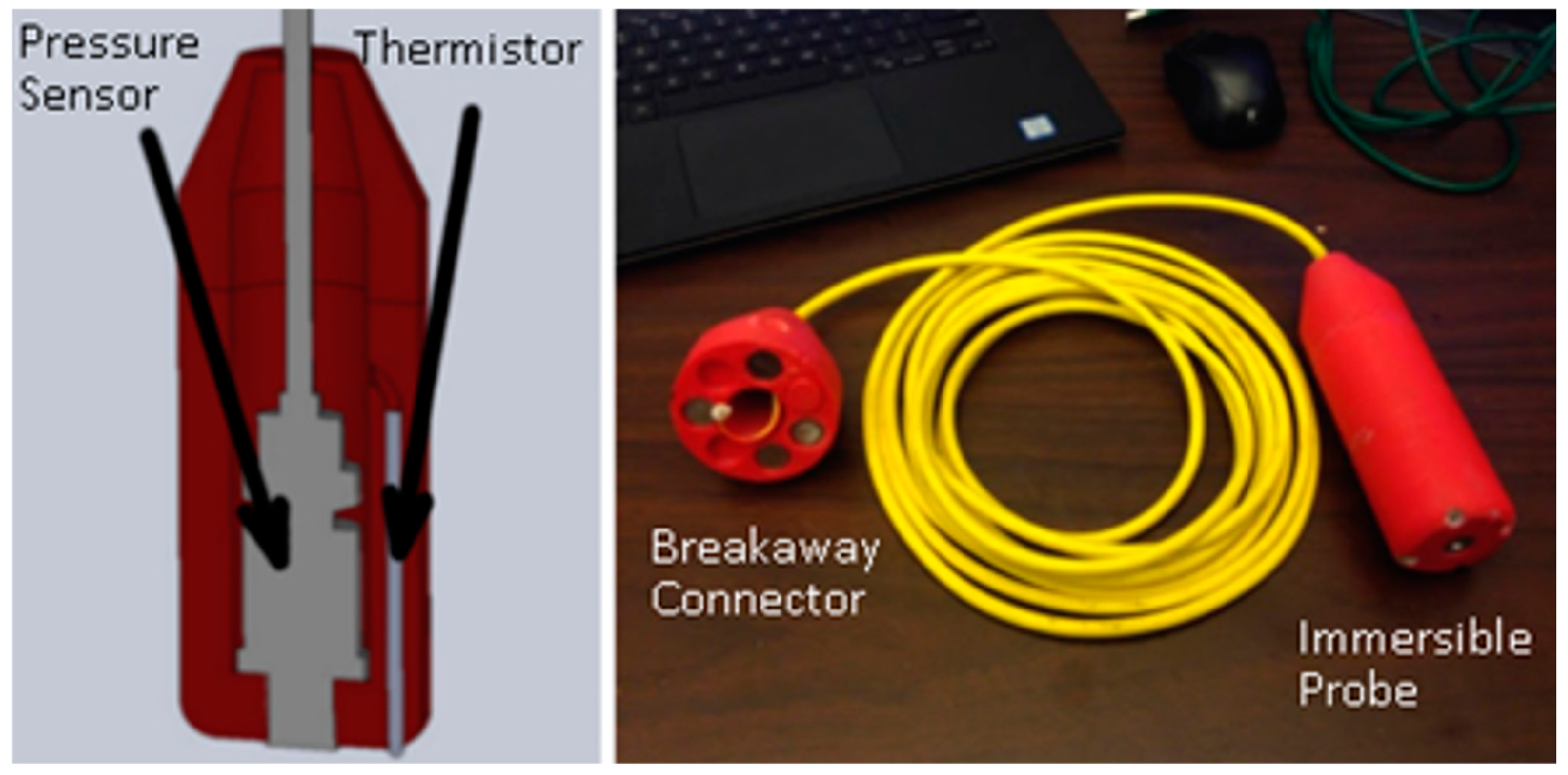
The present research has developed a UAS sensor package for the study of thermal plumes in water, particularly for the examination of thermal effluents from power plants. Such approaches can potentially displace (or complement) the boat-based operations that are currently widely used for effluent characterizations for regulatory and environmental assessments. A quad-copter UAS has been modified to carry the sensors. With the appropriate consideration of the center of gravity location, stable flights could still be achieved with the modified configuration. An attractive feature of UAS operation is the ability to navigate via automated waypoints as demonstrated in the present research. The two main required sensors for the thermal characterization are an infrared thermal imaging camera, used for qualitative imaging of thermal gradients to reveal the overall plume location, and an immersible probe to record the temperature depth profiles at different fixed point locations in the plume. Both sensor subsystems were characterized in controlled tests and were then integrated to the UAS. The immersible probe hangs below the UAS, such that it can be dipped in/out of the water by lowering/raising the overall UAS, and is connected to the UAS via an umbilical cord. For safety reasons, the umbilical cord contains a breakaway mechanism allowing the probe (and the lower part of the cord) to disconnect and fall into the water in the event that the probe is snagged or cannot be retracted.
The full system was flight tested in a proof of concept study at the Rawhide Energy Station including waypoint navigation, imaging of the thermal plume from the IR camera, and acquisition of the temperature depth profiles. The IR camera used in the present work provided a proof of concept demonstration but could ultimately be replaced with a more advanced unit allowing more capability for geotagging of the images, higher resolution, on board storage, and the use of automated image stitching software. The dip probe data demonstrates that the water temperature can be measured at the surface and below the surface using a UAS. Testing is required for each UAS system to understand the accuracy and time response of the temperature probe.
The most significant shortcomings of the system are the limited flight duration and weather and regulatory challenges. The current configuration cannot operate in precipitation and is limited to 20–35 min of flight time (depending on flight profile, wind, number of dips, etc.), which can be limiting for sampling large plumes. However, these limitations can be largely overcome by using a larger UAS and continued improvements in battery technology. The fully loaded UAS is currently limited to flying with wind speeds less than ~10 m/s. The wind speed limitation is expected to improve if a larger UAS is used and as flight controller technology improves. The most significant wind limitation is during landing, where a gust of wind can adversely affect flight performance when the UAS is at low power near the ground. More advanced flight controllers would also benefit the performance in high winds and general stability, and one could integrate the sensor control and data storage functions into the flight controller itself (obviating the need for the Arduino currently used for this purpose).
In the United States, the operation of UAS systems (without additional certification) is limited to 122 m (400 feet) above ground level by the Federal Aviation Administration. This limits the area which can be seen in a single image. A wide-angle camera lens or oblique view of the terrain can improve the coverage footprint; however, a wide-angle lens introduces distortion and oblique views are more challenging in terms of determining the position of the plume.


{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}






