1. Introduction
The synthetic aperture radar (SAR) is able to achieve image reconstruction with high resolution in both range and azimuth direction. However, higher range resolution of SAR requires wider bandwidth of signal, and thereby a higher sampling rate. Similarly, higher azimuth resolution requires longer synthetic aperture and higher sampling rate in azimuth direction. When both higher range and azimuth resolutions are expected, much higher sampling rate and larger volume of sampled data are required. It is thus a great challenge to design a high-resolution radar system hardware with limited cost.
Based on the theory of compressed sensing (CS) [
1,
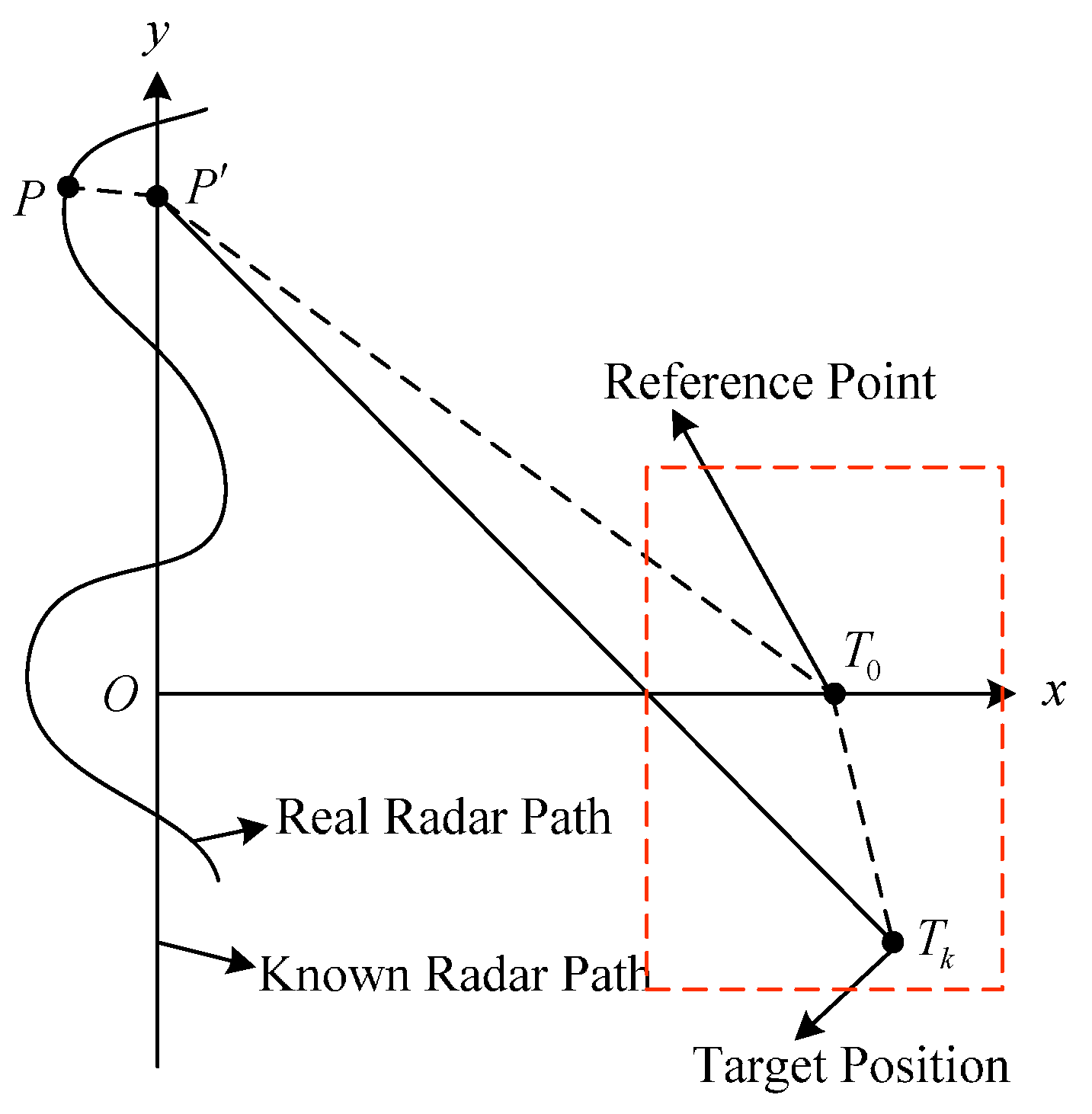
2], both the sampling rate and the volume of sampled data can be reduced, if the reconstructed scene is sparse or compressible. The assumption made in the image reconstruction algorithm is that the observation matrix is known exactly. The observation matrix, however, depends on the mathematical model of the observation process. The uncertainties of the observation position will lead to the mismatch of the mathematical model and the observation matrix, which will cause phase error of the raw data, and thus the defocus of the reconstructed image.
The autofocus techniques, which are developed for correcting the phase error, are still attracting the interests of scientists. Chen et al. [
3] proposed a method of SAR motion compensation based on parametric sparse representation to achieve autofocus of high-resolution SAR image, which assumed that the motion parameters of the radar were constant in each subaperture. Then the trajectory error can be corrected by the estimated motion parameters. Mao et al
. [
4] proposed a knowledge-aided two-dimensional (2D) autofocus approach, but the method did not utilize the CS theory or sparse regularization method to enhance the feature of the reconstructed image.
Many methods were proposed to deal with the model error in the case of CS-based radar imaging. Önhon et al. [
5] proposed a sparsity-driven method for joint SAR imaging and phase error correction, which can remove either one-dimensional (1D) or 2D phase error. Kelly et al. [
6] proposed a stable algorithm, which corrects phase error and reconstructs SAR image with compressively sampled data. An approach was proposed in [
7], which can solve a joint optimization problem to achieve model error parameter estimation and SAR image formation simultaneously. Yang et al. [
8] reported a method that can estimate the observation position error accurately and thus the quality of reconstructed image is improved significantly.
Up to now, the existing methods correcting the phase error of CS-based radar imaging were achieved by solving a two-step optimization problem, i.e., image formation processing and phase error estimation. The frameworks of CS-based image formation processing in [
5,
7,
8] were formulated using exact observation functions, which were inefficient to be applied to the high-dimensional cases. The method proposed in [
6] made a small aperture angle approximation, which hampered the application of high-resolution radar.
In [
9,
10], the approximated observation operators were proposed, which reduce the computational complexity and memory cost dramatically, and thus can be applied in high-dimensional cases efficiently. The approximated observation-based method proposed in [
9] was called “range-azimuth decoupled method” in [
10].
The intent of this paper is twofold. First, we propose a method to correct 1D phase error for approximated observation-based CS-SAR imaging by replacing the exact observation with the mentioned approximated observation in the two-step optimization framework. Then, a modified 1D phase error model is proposed to make the phase error model more precise, while the number of the unknowns does not increase in the phase error model.
The method proposed in this paper is capable of correcting the phase error in the case of approximated observation-based CS-SAR imaging. Compared with the existing methods mentioned above, the proposed method reduces the memory cost. The proposed method is achieved by solving a two-step optimization problem. In the step of image formation processing, the approximated observations can be derived from the inverse of Omega-K [
11] and chirp scaling [
12] algorithms for random-frequency waveform and linear frequency modulated (LFM) waveform, respectively. The images can thus be reconstructed by conducting the iterative thresholding algorithm (ITA) [
9]. In the step of phase error estimation, the 1D phase error model, which can be conveniently applied to the cases of random-frequency and LFM waveforms without any a priori knowledge, is utilized first, and a weighted 1D phase error model is then proposed, which is able to model the phase error more precisely. When incorporating the a priori knowledge of the phase error structures, the method using the proposed weighted 1D phase error model can compensate the 2D phase error by solving a 1D problem. Accordingly, the weighted 1D phase error model achieves a better performance compared to the 1D phase error model, while the number of unknowns keeps the same. Furthermore, data redundancy will not be decreased for the weighted 1D phase error estimation compared with 1D phase error estimation.
This paper is organized as follows.
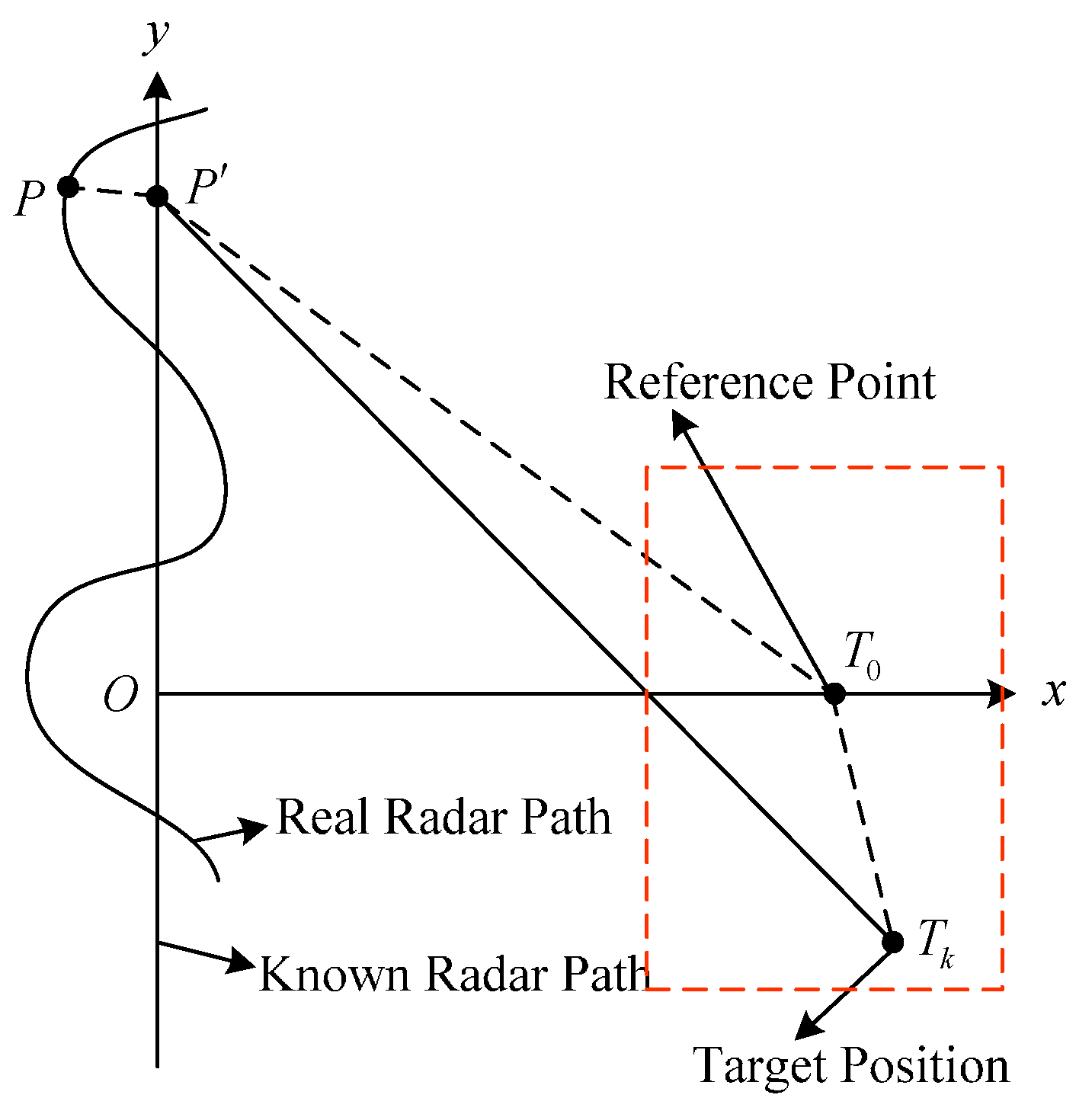
Section 2 describes the signal models of radar imaging, along with model expressions for random-frequency and LFM waveforms. The inherent relationships between the geometric models and the phase error models are also introduced. In
Section 3, a phase error correction method is proposed for approximated observation-based CS-SAR imaging, including the target reconstruction method, the phase error estimation approach, the memory cost analysis, the convergence analysis, and the computational complexity analysis. The simulation and experimental results are presented in
Section 4 to validate the effectiveness of the proposed method. We conclude the work in
Section 5.
Notation: We will use the subsequent notations in this paper. Vectors, matrices and operators will be denoted by bold lower case, bold upper case and roman upper case, respectively, e.g., is a vector, is a matrix, and is an operator. Superscripts , and denote the transpose, conjugate and Hermitian transpose of , respectively.
3. Phase Error Correction for Approximated Observation-Based CS-SAR Imaging
In this section, we will formulate the method to correct phase error for approximated observation-based CS-SAR imaging. First, some preliminary knowledge of approximated observation is reviewed. Then, a method is proposed to correct phase error for approximated observation-based CS-SAR imaging.
3.1. Approximated Observation
3.1.1. Random-Frequency Waveform
Referring to [
9,
10], the approximated observation operators will be obtained by calculating the inverse of matched filtering (MF)-based algorithm. The Omega-K algorithm, which is a type of MF-based algorithm, can be used to achieve the stepped-frequency SAR imaging [
11]. In this paper, the Omega-K algorithm is also used to achieve the imaging procedure of the random-frequency SAR, which can be expressed as:
where
is the echo data without model error,
is the Stolt interpolation operator,
is the range difference compensation function, and
is the reference function. The details of
and
can be seen in [
11].
and
are DFT matrix and inverse DFT matrix, respectively. The lower notation
and
are the azimuth and range direction, respectively.
can be found in Equation (4). The function
is the imaging procedure.
Based on the above exposition, the approximated observation operator
is obtained by calculating the inverse of imaging procedure as:
where
is the matrix form of
in Equation (3), and
is the inverse of Stolt interpolation operator. The notation
denotes the approximated observation operator.
Based on Equation (27), we acquire the approximated observation-based CS-SAR model (named as CS-Omega-K [
16,
17]) as follow:
where
is the Frobenius norm of a matrix, and
is a regularization parameter.
is the
(pseudo) matrix norm [
18]. The regularization item
also can be substituted by
to enhance feature of imaging when
. In this paper, we simply set
, since the widely used soft-thresholding corresponds to
and the soft-thresholding operator can be analytically specified.
3.1.2. LFM Waveform
In [
10,
19], the chirp scaling algorithm, which is also a type of MF-based algorithm, was used to achieve the LFM SAR imaging. In this paper, the chip scaling algorithm is used to achieve the imaging procedure of the LFM SAR, which can be expressed as:
where
denotes the echo data without model error.
,
and
are the standard phase functions of the chirp scaling [
19] (
,
and
). The function
is the imaging procedure.
Based on the above exposition, the approximated observation
is obtained by calculating the inverse of imaging procedure as:
where
is the matrix form of
in Equation (10). The notation
denotes the approximated observation operator.
Based on Equation (30), we are able to acquire the approximated observation-based CS-SAR model (named as CS-chirp scaling [
10]) as follow:
The aim of briefing the published research is to suggest a new phase error correction method, which will be formulated as follows and can achieve the phase error correction for approximated observation-based CS-SAR imaging.
3.2. 1D Phase Error Correction for Approximated Observation-Based CS-SAR Imaging
Thus far, we have derived the inexact (nominal) observation model, but the model error is still unknown. Thus, CS-SAR imaging models must be modified. Considering the 1D phase error models in Equations (24) and (25), the CS-SAR imaging models in Equation (28) using random-frequency waveform and in Equation (31) using LFM waveform will be modified as:
The cost function is denoted by:
where the phase error
is written, referring to Equation (24), as:
By solving Equation (32), both the image and the 1D phase error can be jointly obtained. Using similar methods proposed in the [
5,
8], both the image and phase error are estimated by solving a two-step optimization problem. In the first step,
is estimated by minimizing the cost function Equation (33) using the given
. In the second step,
is obtained by minimizing the cost function using the estimated
. By iteratively updating
and
as described above, both the image and the 1D phase error can be jointly estimated. The algorithm flow is outlined as Algorithm 1. Initially, let
i.e.,
.
| Algorithm 1. 1D Phase Error Correction for Approximated Observation-Based CS-SAR Imaging. |
| Initialize: , |
| Step 1: Image reconstruction |
| Step 2: Phase error estimation |
| Step 3: Let and return to step 1. |
| Terminate when is equal to a preset threshold . |
Steps 1 and 2 are the major steps of Algorithm 1. In Step 1, the image is reconstructed by the given phase error. The optimization problem is expressed as:
Since
is a diagonal matrix, seen in Equation (34), Equation (36) can be rewritten as:
Then, due to the linearity of
, we solve the optimization problem efficiently by iterative thresholding algorithm (ITA) [
9,
10,
20]. Let
, and the optimal solution is obtained by using the iteration:
where
is step size, which controls the convergence of the ITA. In Equation (38),
is a thresholding operator, which is defined as:
where soft-thresholding operator
is analytically specified as:
In the proposed method, we simply set
(
[
9]). With fixed parameter
, the parameter
will depend on the sparsity parameter
. We set
(
is the
-th largest component of
in magnitude).
In Step 2, the phase error is estimated by the reconstructed image. The optimization problem is expressed as:
Since
is a constant, Equation (41) is rewritten as:
From Equations (34) and (42), it is quite obvious that the data error of the
-th observation position is only related to
. Then, the optimization problem Equation (42) is divided into a set of independent optimization problems as follows:
where notation
denotes the
-th row of the matrix. The phase error
and/or
can be obtained as follows (the details can be found in the
Appendix A):
Substituting Equation (44) into Equation (34), Step 2 of Algorithm 1 can be implemented straightforwardly.
3.3. Weighted 1D Phase Error Correction for Approximated Observation-Based CS-SAR Imaging
Considering the SAR imaging system using random-frequency waveform without narrow bandwidth approximation, the SAR imaging model (28) is modified as:
The cost function is denoted by
where
can be seen in Equation (18). By solving Equation (45), both the image and the weighted 1D phase error will be estimated jointly. The method is similar to Algorithm 1, and the algorithm flow is outlined in Algorithm 2. In the initialization, let
i.e.,
.
| Algorithm 2. Weighted 1D Phase Error Correction for Approximated Observation-Based CS-SAR Imaging. |
| Initialize: , |
| Step 1: Image reconstruction |
| Step 2: Phase error estimation |
| Step 3: Let and return to step 1. |
| Terminate when is equal to a preset threshold . |
In Step 1, the optimization problem is expressed as:
Let
, and use the iteration
Then, the optimization problem (48) is efficiently solved by the same method as Algorithm 1.
In Step 2, the optimization problem is expressed as:
From Equations (18) and (50), it can be seen that the data error of the
-th observation position is only related to
. Then, the optimization problem in Equation (50) can also be divided into a set of independent optimization problems as follows:
The weight
, which is a priori knowledge, must be obtained before solving Equation (51). Equation (51) is an unconstrained optimization problem, which can be solved using gradient-based optimization method [
8]. In Equation (51), there is only one unknown
to be estimated and it belongs to a real number. Hence, the optimal solution is able to be obtained by line search [
21].
3.4. Memory Cost
The proposed method consists of a two-step optimization problem. In the first step, the image is reconstructed. In the second step, the phase error is estimated and compensated. The second step is divided into a set of independent optimization problems. Thus the biggest matrix will appear in the first step. There are some notations to be denoted as follows. , and denote the number of azimuth samples, the number of range samples, and the number of scatterer points after discretizing the scene, respectively. The size of the sensing matrix in the phase error correction for exact observation based CS-SAR imaging is complex numbers, but the size of the matrix in the proposed method is complex numbers. Therefore, the proposed method can reduce the memory cost and the hardware requirement significantly.
3.5. Convergence
The proposed method is achieved by calculating a two-step optimization problem. The cost function of 1D phase error correction or weighted 1D phase error correction for approximated observation-based CS-SAR imaging can be denoted as .
In the first step, , and thus .
In the second step, , i.e., .
Combining the two steps, there will be , and then the cost function is a monotonous decrease function. Since , the convergence of this process can be guaranteed.
3.6. Computational Complexity
In order to calculate the computational complexity, we have defined some notations, which are the number of azimuth samples , the number of range samples , the number of required iteration in the first step , and the number of required iteration in algorithm .
In the first step, the image is reconstructed. This process is an iterative process. One-step iteration includes the calculations of imaging procedure, approximated observation procedure, and thresholding operation. Both imaging procedure and approximated observation procedure have the same computational complexity of . The complexity of thresholding operator is order . Thus, the complexity of the first step is at the order .
In the second step, the phase error is estimated and compensated. The optimal solution of the second step in Algorithm 1 can be analytically expressed. The complexity of this procedure is order . The optimal solution of the second step in Algorithm 2 is able to be obtained by line search. The complexity of this procedure is order , where denotes the number of iteration in line search.
Based on the above exposition, the computational complexities of Algorithms 1 and 2 are at the order and , respectively.
5. Conclusions
In this paper, we proposed a phase error correction method for approximated observation-based CS-SAR imaging. The proposed method yields a clear advantage in term of memory cost over conventional CS-based autofocus algorithms. The 1D phase error model, which can be conveniently utilized in autofocus technique without any a priori knowledge, is based on narrow bandwidth approximation. We also analyzed the inherent relationship between the geometric model and the phase error model in the case of random-frequency waveform. By incorporating a priori knowledge, the weighted 1D phase error model was proposed, which corrects the 2D phase error by estimating a 1D problem. The proposed weighted 1D phase error model is more precise than the 1D phase error model, thus has a better performance.
Although the weighted 1D phase error correction method proposed in this work can be applied only in the case of random-frequency waveform rather than the LFM one, since different waveforms have different geometry and signal models, it would be possible to apply the weighted 1D phase error correction to LFM waveform with appropriate modification, and this will be our future effort.




{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}