In a phononic crystal consisting of a square array of air holes, the lattice parameter of the perforations must be around half the wavelength of the wave to be diffracted and the band-gap width is proportional to the so-called filling factor π(
r2/
a2), where
a is the lattice parameter and
r is the radius of the perforation [
5]. When a transducer is made of different materials as it is the case of the transducers studied here, the optimal lattice parameter is different for each transducer section. Aluminum has propagation velocities at different propagation modes (bulk or plate), around 1.5 times the corresponding to PZT. That means that both the lattice parameter and the hole diameter should be 1.5 times bigger for the same frequency. In Ref. [
5] a PZT-5A piezoelectric disc with 20 mm of diameter and 2 mm of thickness was studied. There, it was shown that with a lattice parameter
a = 2 mm and holes of 0.7 mm radius (38% of filling factor), clear indications of the filtering of radial modes at the resonance frequency existed. With these lattice parameters, the band gap in aluminum should be centered at a frequency around 1.5 MHz. Nevertheless, if we use these results, where a filtering band close to 700 kHz around the thickness resonance was measured, we expected a good degree of filtering of the radial modes in the aluminum plate around 1 MHz.
3.1. FEM Modelling
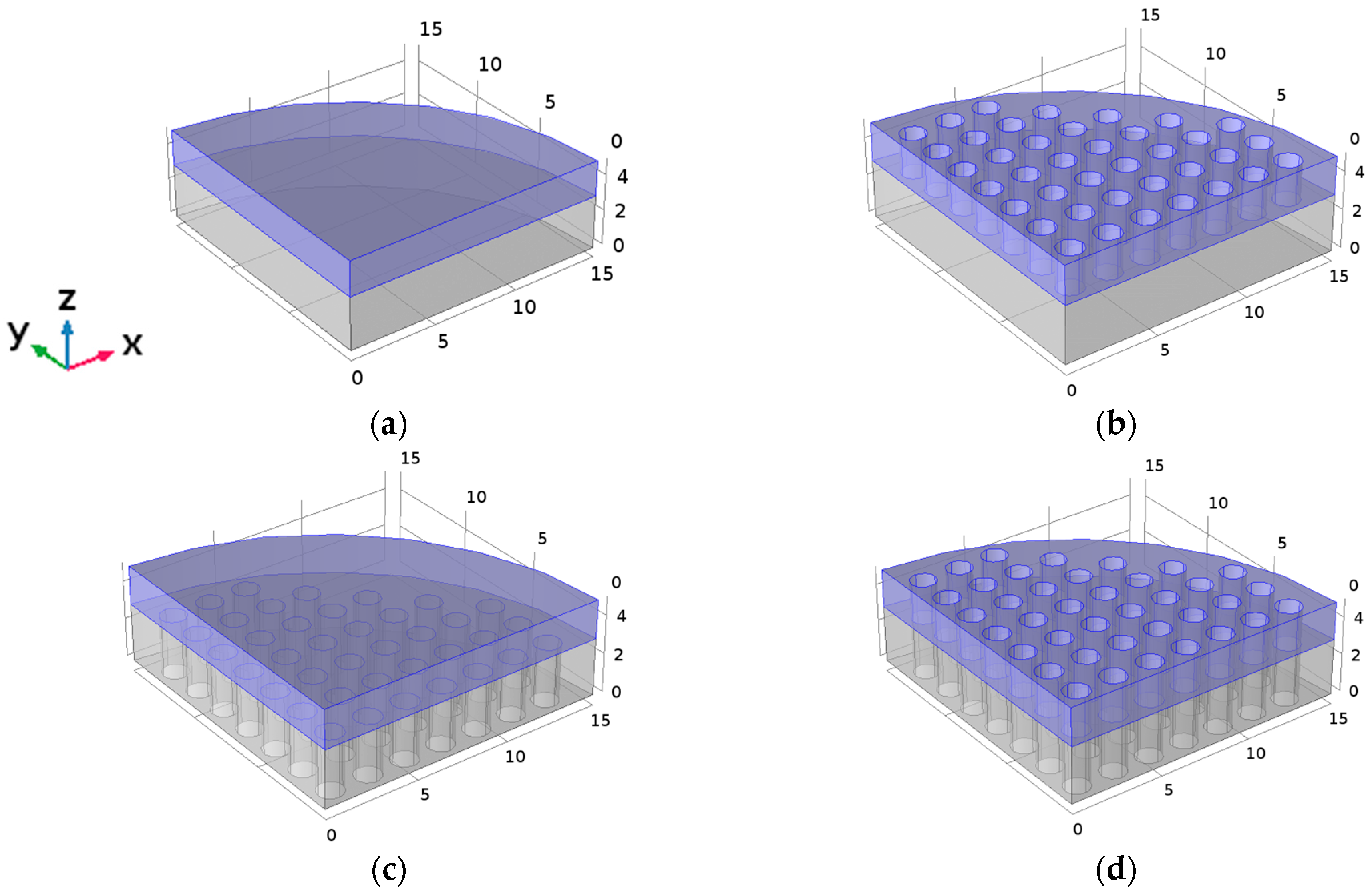
To compare with experimental results, a frequency range from 300 kHz to 1.2 MHz was used for all calculations. In the four models, the bottom piezoelectric disc face was grounded and the upper face was excited with an electric potential of 1V. A mechanical damping was introduced, as isotropic structural factor, of 1 + 2 × 10−2i. Given the symmetry of the perforated disc, it is enough to consider only a quarter of the disc, provided that symmetry conditions are applied. The typically sampling size (the finite element mesh size) to solve a wave propagation problem should be at least five elements per wavelength. In the calculated models, bulk and plate waves (mainly symmetric Lamb modes) propagate. Velocities of cylindrical waves coming from the contour of the PZT and aluminum plates with 2 mm and 3 mm of thickness are around 4000 ms−1, which means a wavelength of 4mm at 1 MHz. Therefore, finite element mesh of about h = 1.5 × 10−4 m in the drilled domain and h = 5 × 10−4 m in the remaining domain was used. The mesh was even refined at the boundaries.
Model 1 (
Figure 1a) where neither the piezoceramic or the aluminum section have perforations, is the typical commercial design of a 1 MHz physiotherapy transducer.
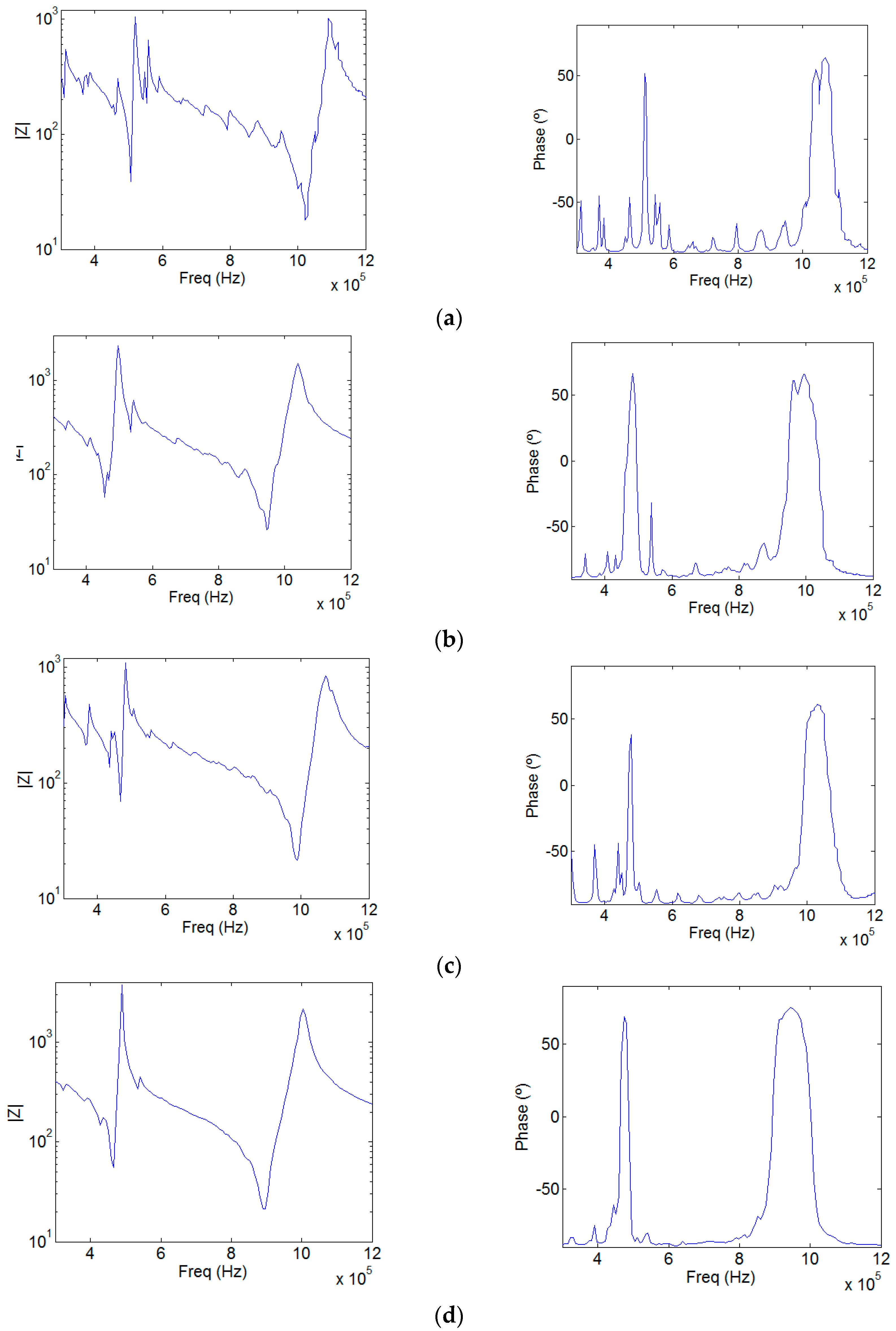
Figure 2a shows its simulated module input electrical impedance and its phase, calculated using a frequency step of 4.66 × 10
3 Hz (about 193 points of the used frequency range). The first minimum of the impedance module is at 500 kHz and the second minimum is at 1 MHz, the first and second thickness resonances related to half and one wavelength, respectively.
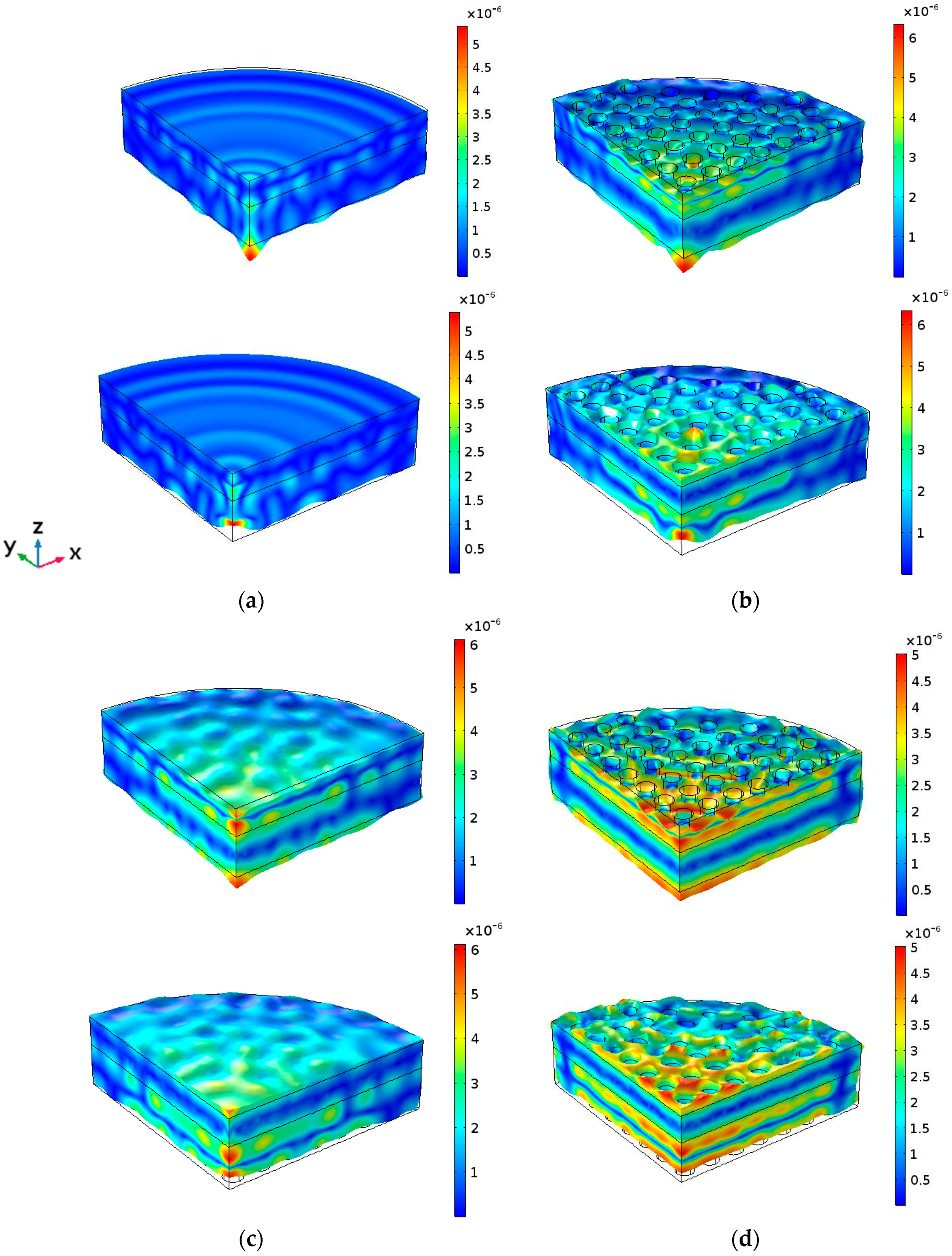
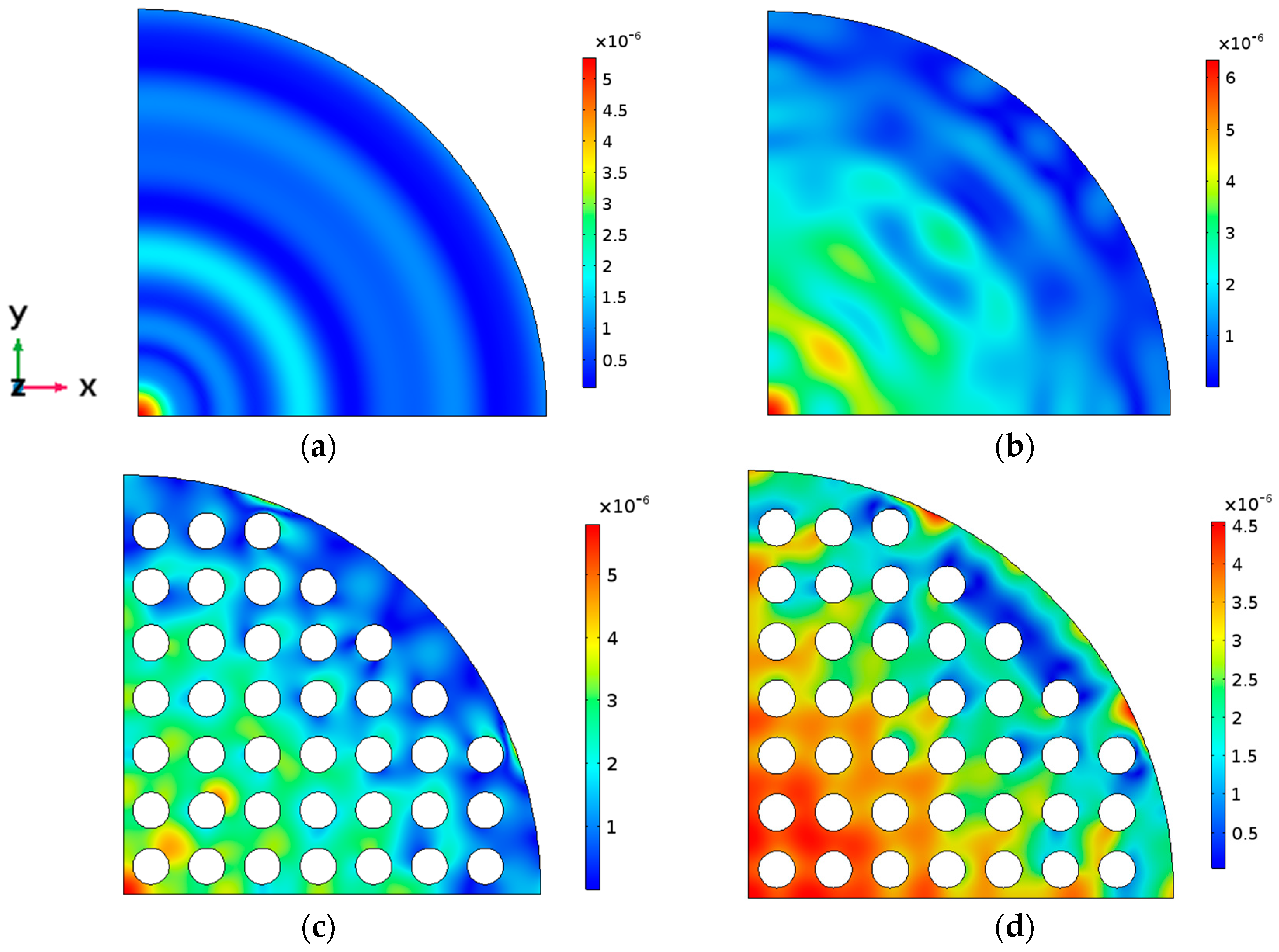
These two main thickness resonances are obviously coupled with all the radial modes of the entire cylindrical structure. The plate modes excited at the cylindrical contour interfere with the thickness mode, thus modifying the amplitude and phase of the out-of-plane displacement of both the PZT and the aluminum transducer faces. The signature of a combination of Bessel functions are superimposed to the plane wave in-phase displacement. The z component of the cylindrical waves is not so strong as to create complete counter-phase vibration. The consequence of this mixture of thickness and radial vibration modes is that the mechanical displacement amplitude pattern of the main circular surfaces of the transducer at thickness resonance (997 kHz) becomes far from the thickness in-phase assumption, showing the signature of radial modes both in the amplitude and in the phase, as shown in
Figure 3a and
Figure 4a. Consequently, the acoustic field emitted into a medium, such as the human body, is not related to the acoustic diffraction piston-like assumption and the physiotherapists, even aware of the circular diffraction theory, will have no idea about the real field distribution emitted into the body [
2].
Figure 2b shows the input electrical impedance of Model 2. In this model, only the piezoelectric disc is a phononic structure. As it can be seen, the signature of the radial modes is less evident; the more one approaches the center of the phononic crystal frequency band (1 MHz), the cleaner this signature is. Moreover, as reported in [
5], the resonance frequency and the quality factor
Q decrease. The mechanical displacement amplitude pattern of the aluminum surface at the resonance frequency (951 kHz) is shown in
Figure 3b and
Figure 4b. It is evident that the influence of the radial modes is lower than in the case of the device without phononic crystal. The out-of-plane vibration still has radial symmetry, but it is less concentrated and in-phase (
Figure 3b). The phononic crystal structure of the piezoceramic was capable of improving the phase vibration, even at the aluminum transducer surface.
Figure 2c shows the input electrical impedance of Model 3, where only the aluminum disc is a phononic structure. The filtering of the radial modes is not as evident as in Model 2 since the design of the phononic crystal is not well fitted to the aluminum plate, as explained at the beginning of this Section. The vibration is mainly in phase and its amplitude is more regular along the surface. As expected, circular modes are not present (
Figure 3c). Despite that the aluminum phononic crystal is not centered at 1 MHz, Model 3 seems to be effective in some degree. The resonance frequency is lower than the measured in Model 1 because the aluminum section suffers the same softening effect reported in [
5].
Finally, concerning Model 4, where both the piezoceramic and the aluminum discs were drilled, in
Figure 2d we observe that the filtering is quite clear and effective in all the frequency range studied. The softening effect is now stronger, lowering the frequency up to 890 kHz.
Figure 3d and
Figure 4d show that, apart from the transducer contour, all the surface vibrates in phase and with a quite regular amplitude distribution. Local maxima are located at the inter-hole space. No radial modes are observed, neither in the input electrical impedance or in the vibration pattern.
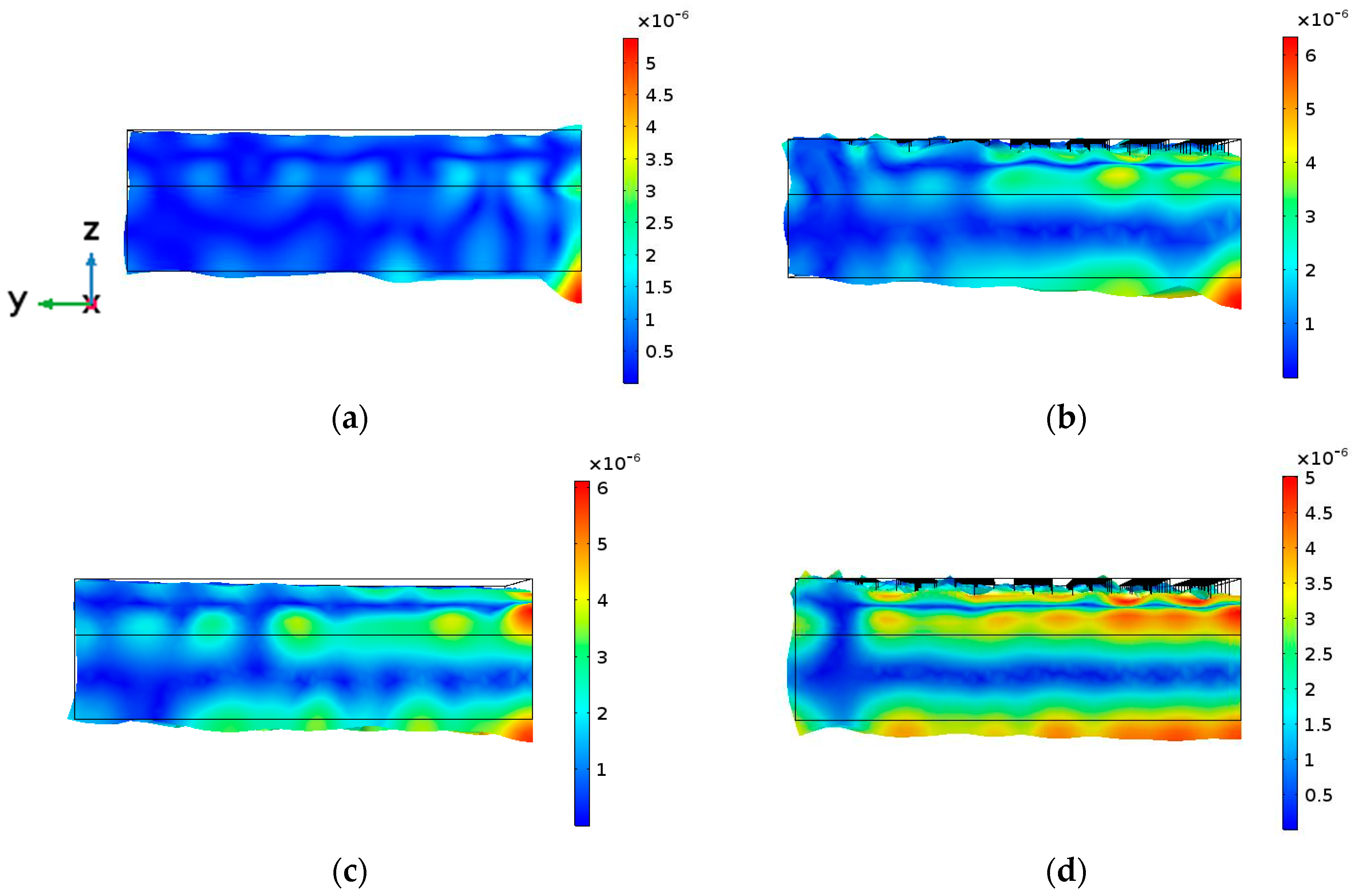
Figure 5 shows the maximun out of plane vibration amplitude at the maximum elongation of the aluminum surface in the
yz section (
x = 0) for each transducer model at their corresponding resonance frequency (997 kHz, 951 kHz, 988 kHz and 894 kHz, respectively). All of them were excited with the same electrical amplitude signal (1 V).
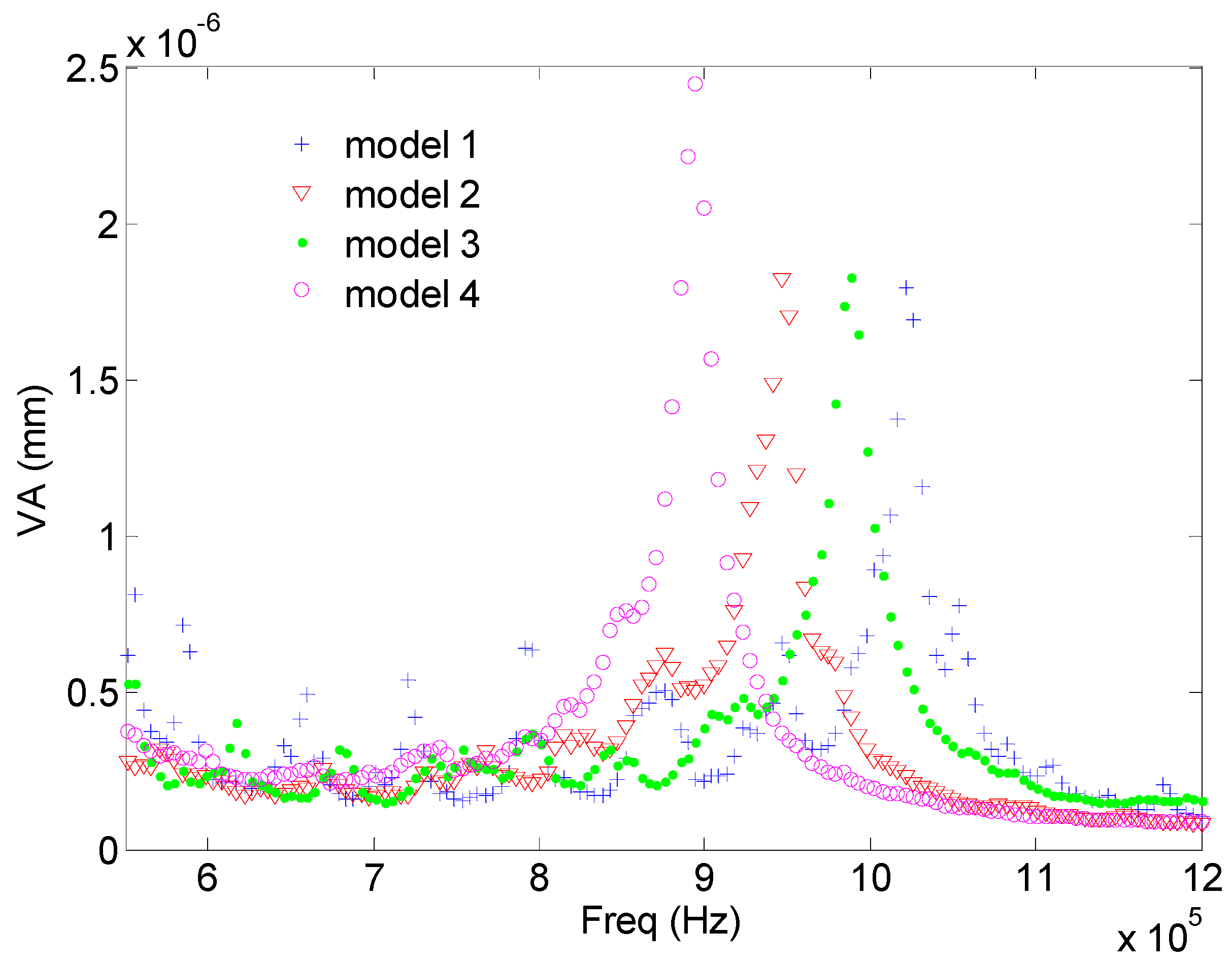
To compare the transduction efficiency of the different models, the average of the maximum value of the vibration along the
z axis of all the calculated points in the aluminum face was calculated as a function of the vibration frequency.
Figure 6 shows the average, without taking into account the effective radiating surface of each model. As observed, the highest value of each model is attained at the corresponding resonance frequency. The bandwidth is similar. Model 4 displays the highest average mechanical displacement. The softening of the resonance structure is correlated with the increase of the mechanical displacements as expected (see [
5]). If the actual emitting surface is considered (Model 3 and Model 4 has a surface with holes), if the average is multiplied by the surface, then these results are modified. From
Figure 7 we see that this average amplitude vibration is the same as the obtained from Models 1, 2 and 4. Since Model 4 is the only one with a homogenous phase vibration, we conclude that it is the most efficient.
Summarizing. Model 4 is the best option in terms of mechanical vibration amplitude and acoustic efficiency. Nevertheless, Model 2 is more practical for clinical applications because the emitting face has no holes. Model 2 has the same average mechanical displacement that Model 4 but the vibration distribution is less uniform in amplitude (
Figure 3,
Figure 4 and
Figure 5).
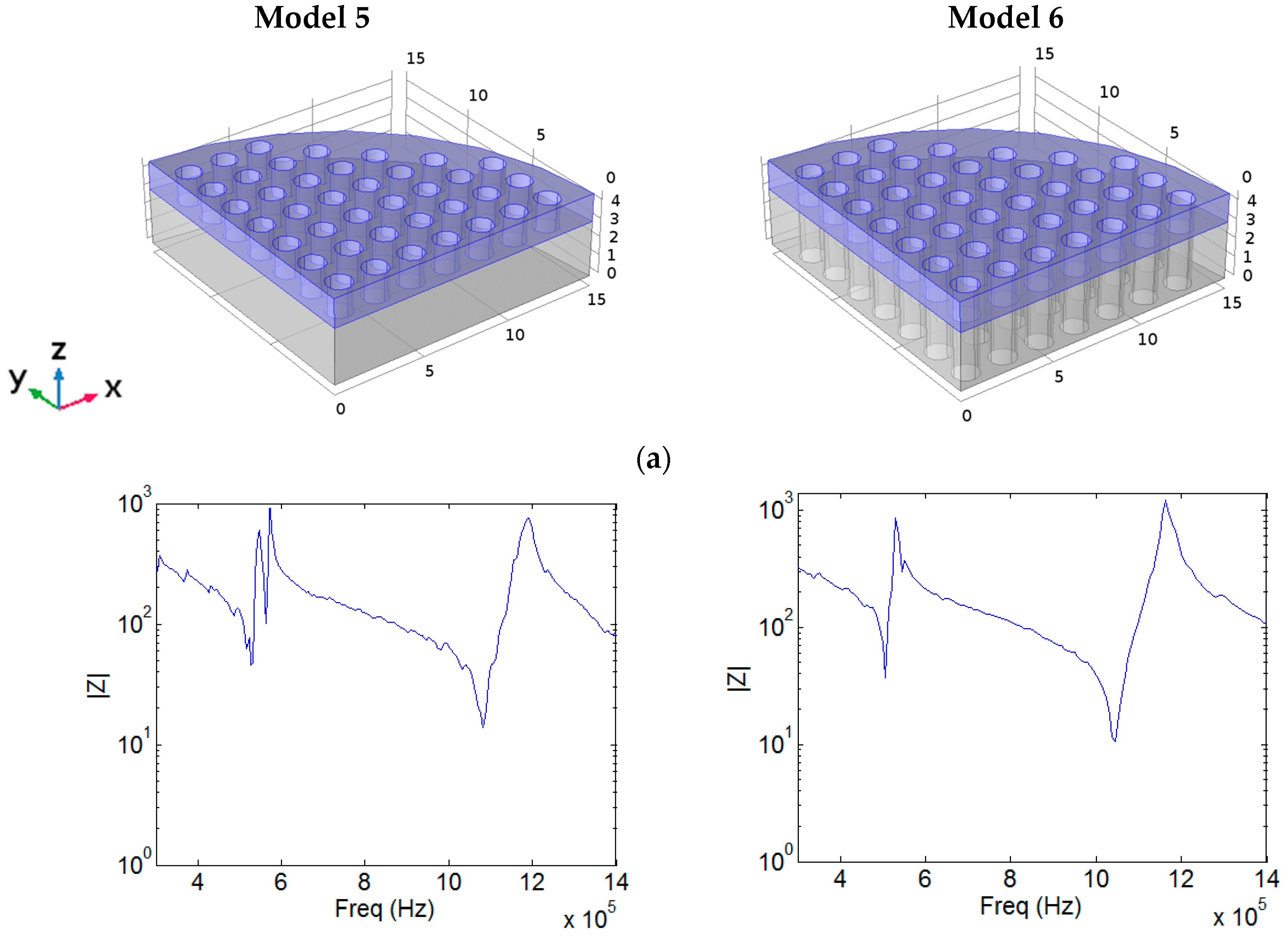
Since the standard lowest frequency used in physiotherapy is 1 MHz, we now consider two more models (Model 5 and 6), similar to Models 2 and 4, but where the piezoceramic disc has 1.5 mm of thickness (
Figure 8a). The KLM monodimensional model was used to choose this piezoceramic thickness to get a transducer with a frequency close to the standard 1 MHz.
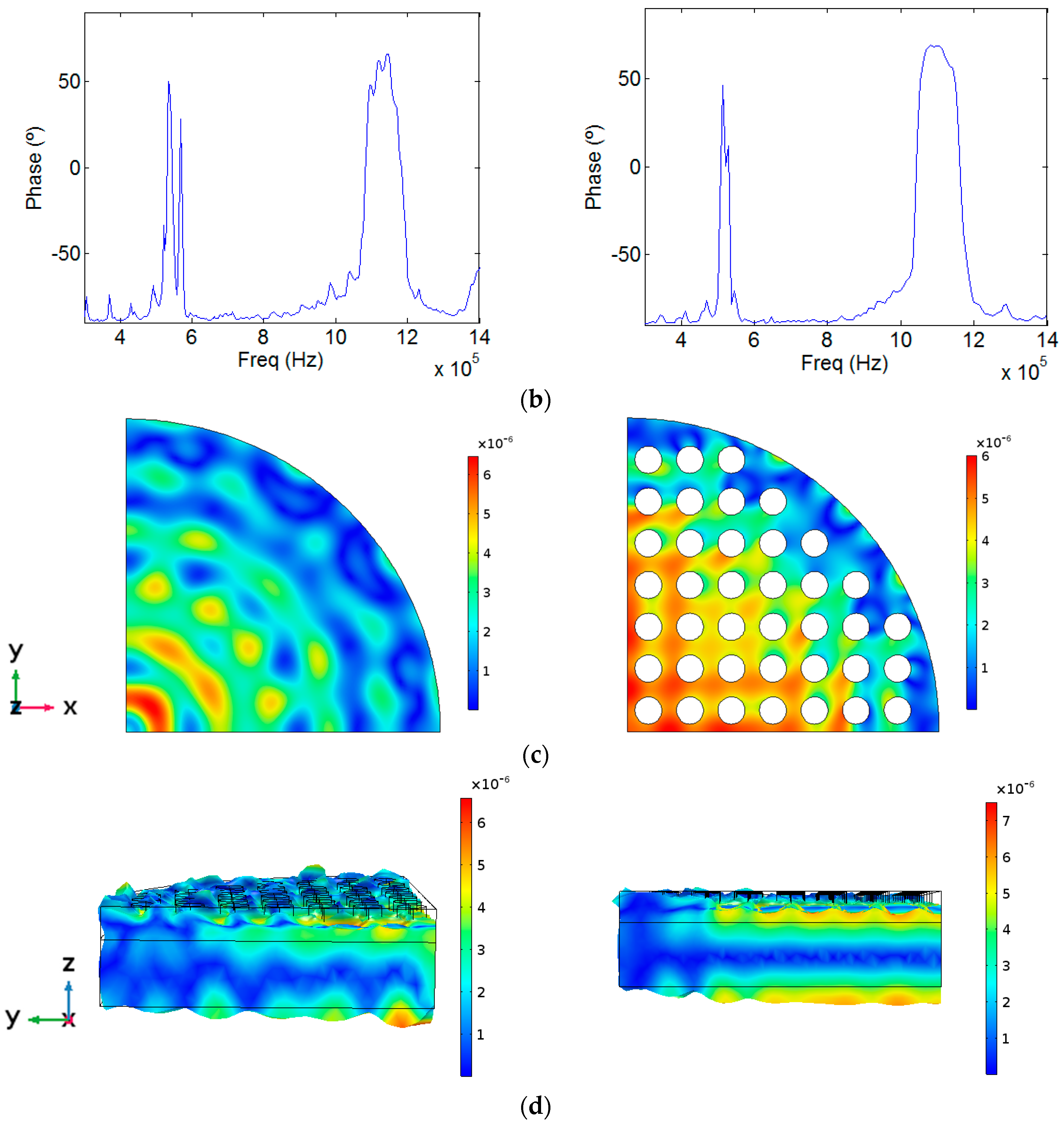
Figure 8 shows the module and phase of the input electrical impedance as a function of frequency, the out-of-plane component of the mechanical displacement at the aluminum surface for the resonance frequency and the value of the maximum out-of-plane vibration amplitude at maximum elongation of the aluminum surface in the yz section, for Models 5 and 6. The corresponding resonance frequencies are 1.082 MHz and 1.042 MHz, respectively. We observe that behaviour of these models is quite similar to those of Models 2 and 4.
3.2. Experimental Results
Ferroperm Pz26 hard piezoceramics were used to build Models 1, 3, 5 and 6. The aluminum discs and the drilling of the piezoceramics were made at our workshop. The piezoceramic drilling process was made with an automatic programmable drilling system. After several trials, a set of drilling parameters including the maximum number of holes for each drill were defined and finally used to produce the discs with holes. The piezoceramic and the aluminum sections were bonded with Araldite D & HY935.
Models 1 was first tested to compare with the numerical results.
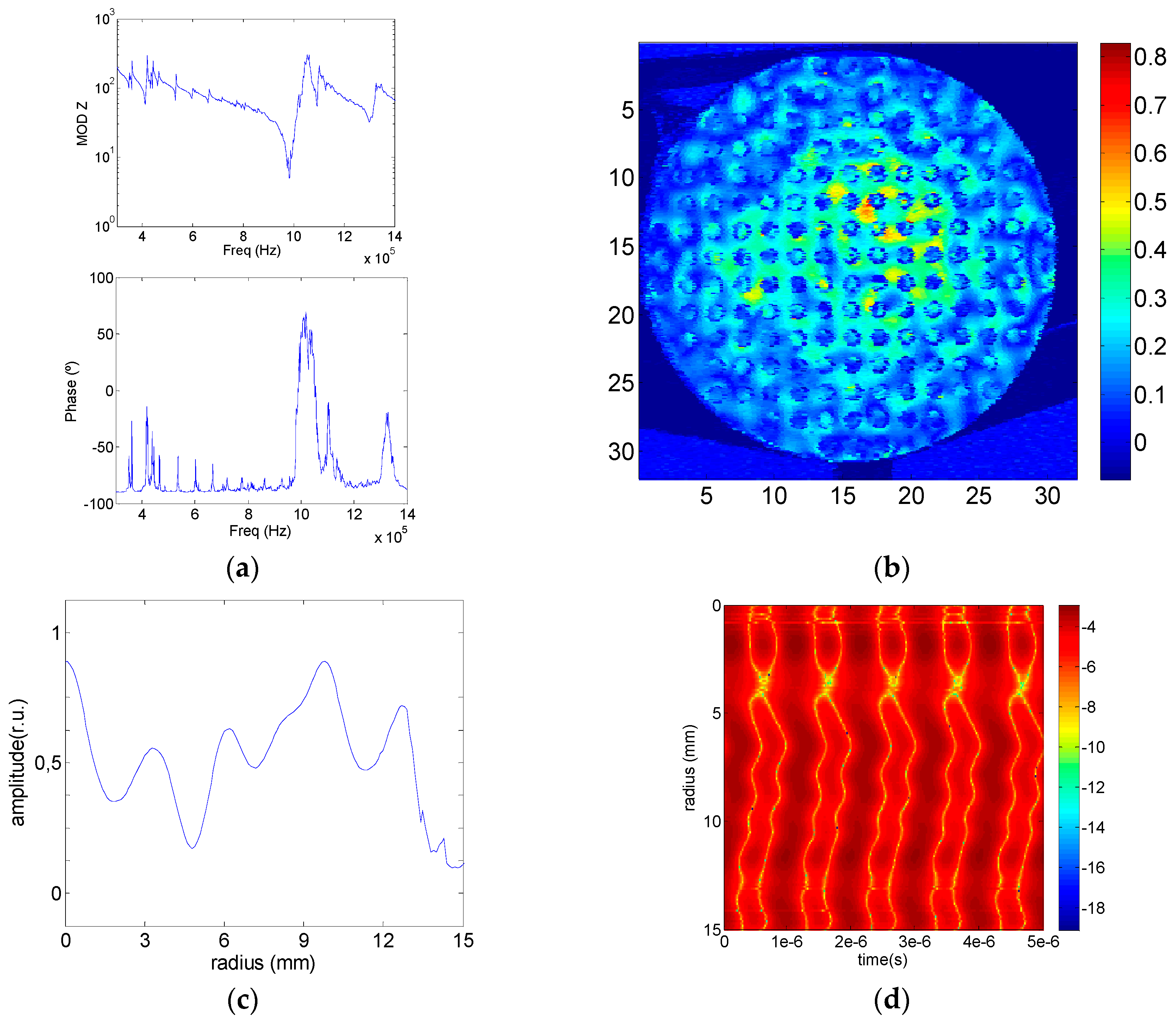
Figure 9 shows the set of electrical and mechanical outputs of Model 1.
Figure 9a shows the electrical impedance module and phase and
Figure 9b shows the aluminum surface out-of-plane mechanical displacement measured by laser vibrometry in linear arbitrary units.
Figure 9c shows the maximum amplitude of the mechanical displacement along the radius.
As it can be seen, the agreement with the simulated model is quite good (see
Figure 2a,
Figure 3a,
Figure 4a and
Figure 5). As the vibrometer spot is scaned from the centre to the border the maximum mechanical amplitude, the wave phase along the radius and the recorded vibration signal as a function of time, were measured and are shown in
Figure 9d. The phase variation can be observed by following the amplitude variation for a given time. Horizontal axis correspond to a time of 5 μs. Bar scale gives the amplitude of the signal in relative units logarithmic scale. The figure shows that the phase of the mechanical displacemet varies along the radius as a consequence of the strong coupling between the thickness mode and the thickness component of the radial modes.
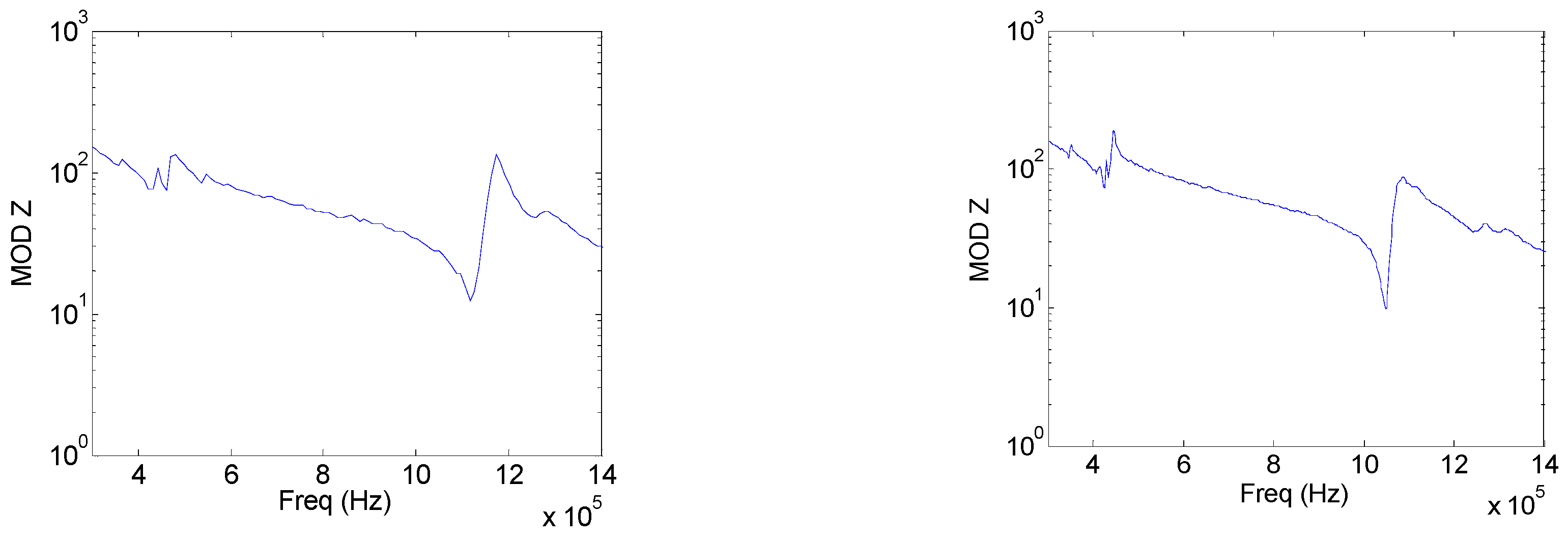
Now Model 3 was tested to observe the filtering produced by the aluminum section with drilled holes.
Figure 10 shows the same tests as those shown in
Figure 9 for Model 1. As predicted by the numerical results, the electrical and vibration measurements show a clear filtering of the radial modes. Interestingly, the phase change observed in
Figure 10d agrees with the one observed in
Figure 3c. The surface pattern of
Figure 10b displays the same square shadow, rotated in the 110 crystalographic direction, which is also observed in
Figure 4c. Finally, Models 5 and 6 were fabricated and tested. Since the goal is to get power transducers with a vibration pattern close to the piston-like assumption, the Model 6, with a complete phononic structure, is the best model as was also predicted by the FEM model. The variation of the mechanical amplitude distribution along the radius is less than 25% along the 75% of the entire transducer emitting face (
Figure 11d) with an in-phase vibration behavior (
Figure 11f). Model 5 shows a 40% variation of the mechanical amplitude vibration along the radius in the 50% of the emitting surface with in–phase vibration (
Figure 11c,e). As in the case of the Model 2, the Model 5 is also a possibility if a metal plate without holes is required for technical reasons.
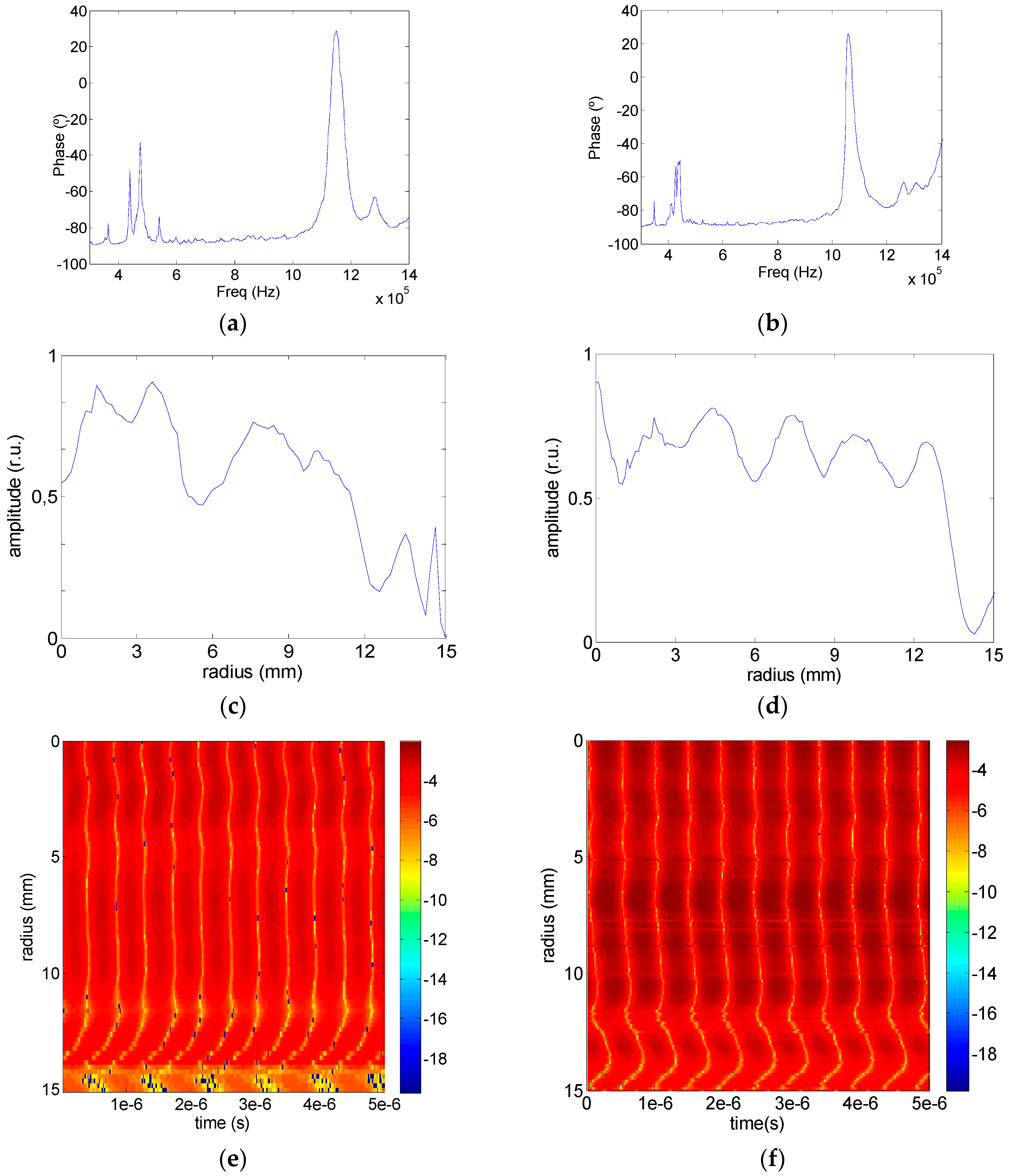
Finally, in
Figure 12 the calculated maximum z mechanical displacement of the Model 6 is compared with the experimentally measured maximum out-of-plane mechanical displacement. The vibration distribution agrees quite well. The bar scales show that the relative values also agree.


{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}













