
Activity Learning as a Foundation for Security Monitoring in Smart Homes



Abstract
:1. Introduction
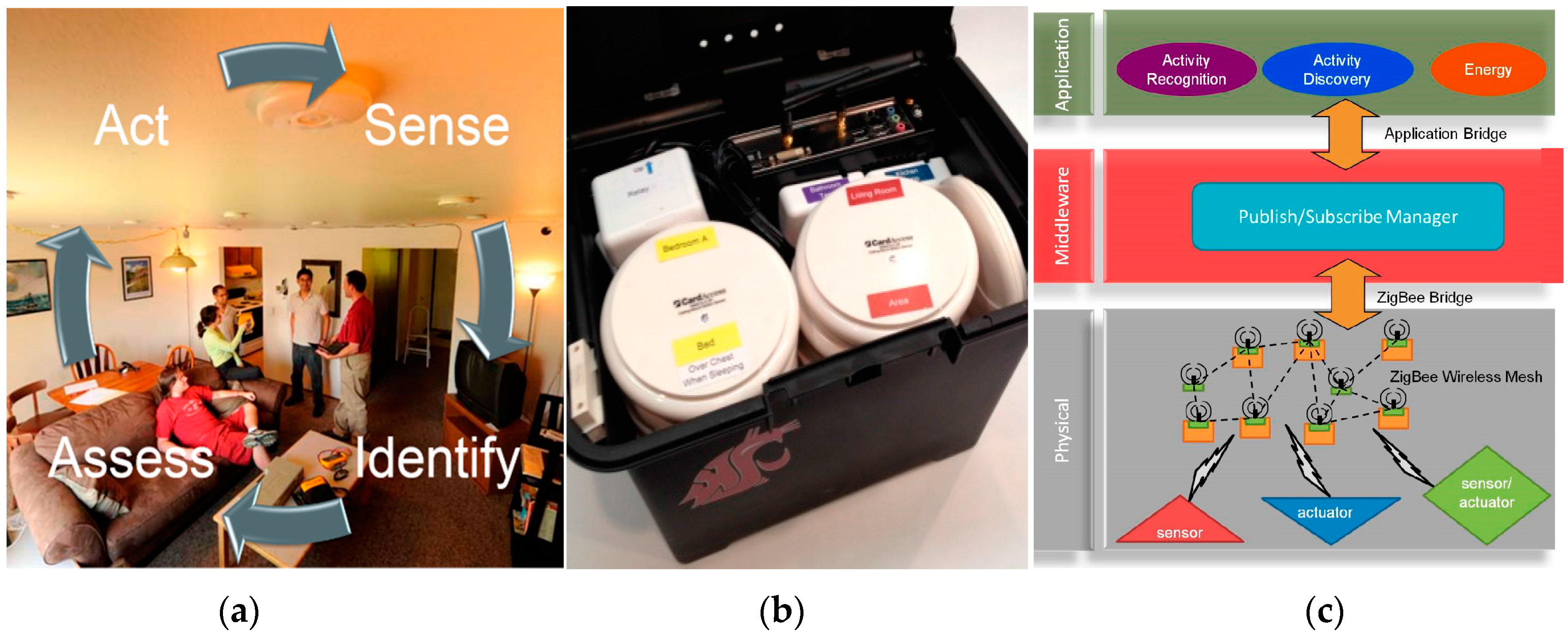
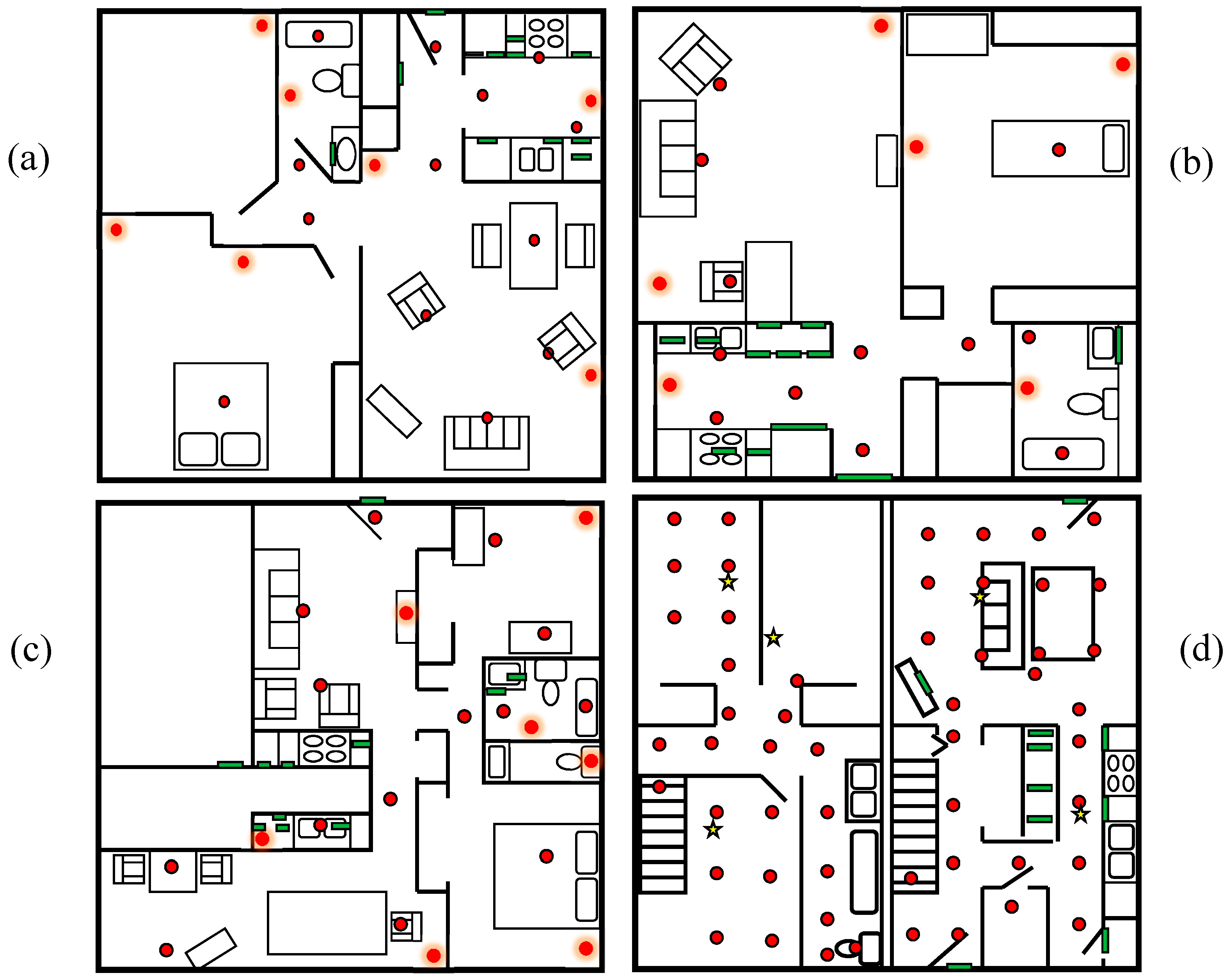
2. CASAS Smart Home
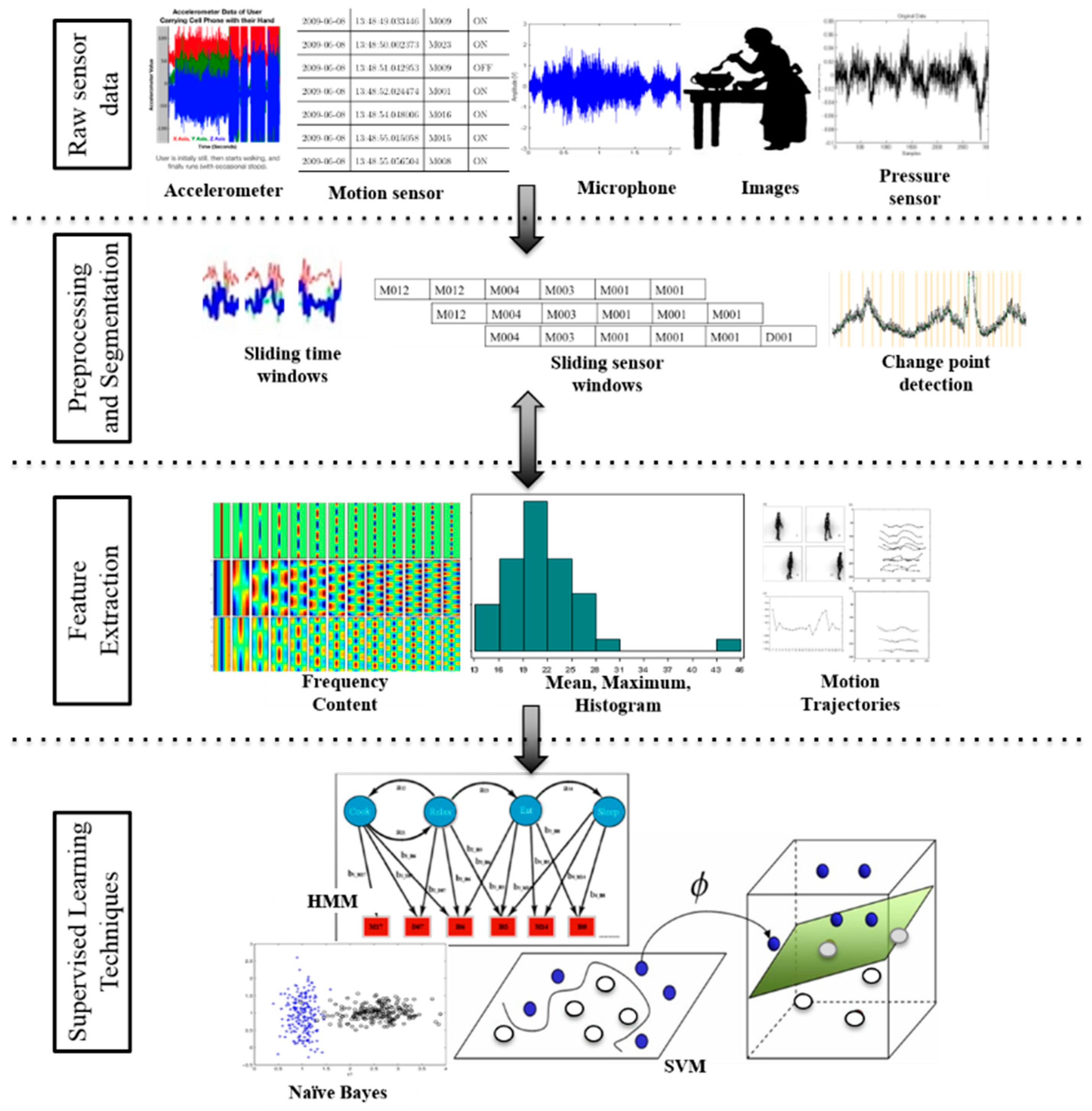
3. Activity Learning
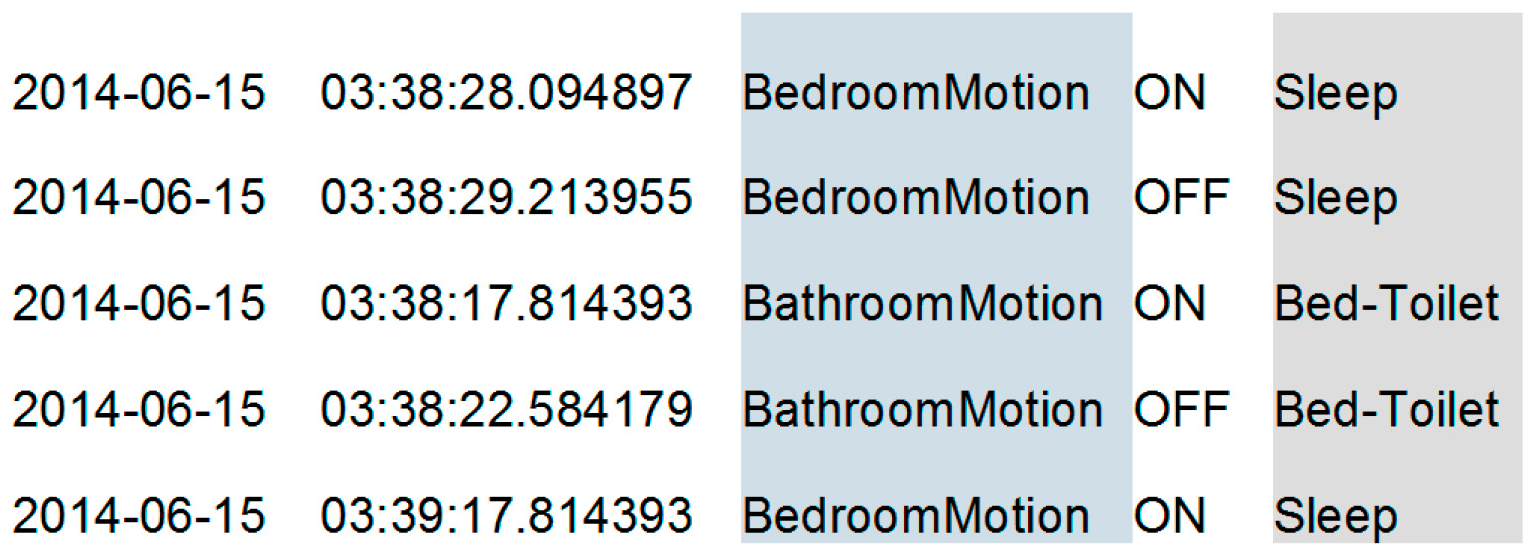
3.1. Activity Recognition
3.2. Activity Discovery
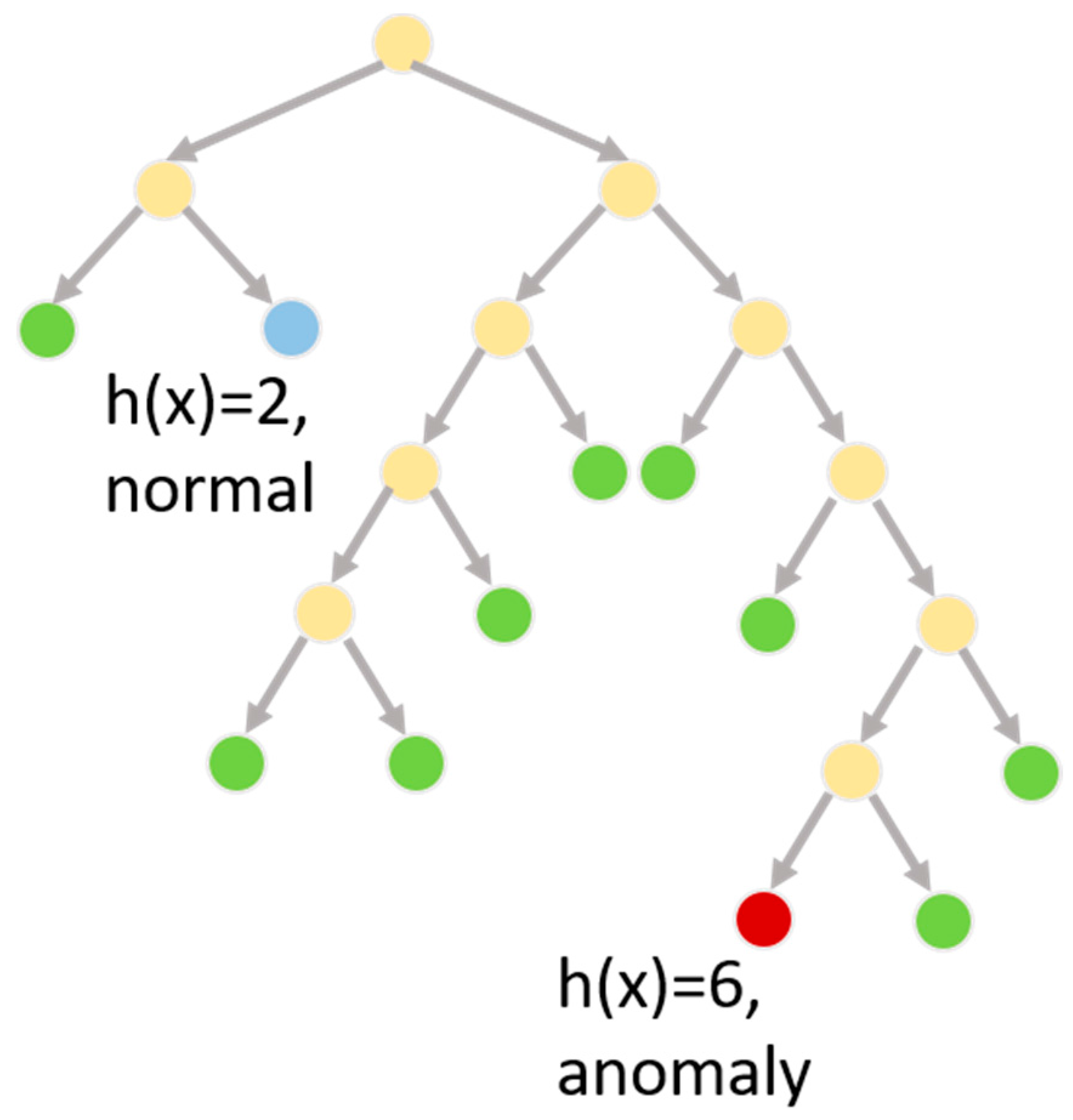
4. Anomaly Detection
5. Evaluation
5.1. Hybrid Real-Synthetic Data Generator
5.2. Validation of Anomaly Detection
- f.standard: include timing, window, and sensor features that are listed in Table 1
- f.activity: include timing information and the activity label for the corresponding window of sensor data as provided by the discovery-enhanced CASAS-AR activity recognition algorithm
- f.all: include all of the standard features together with activity label
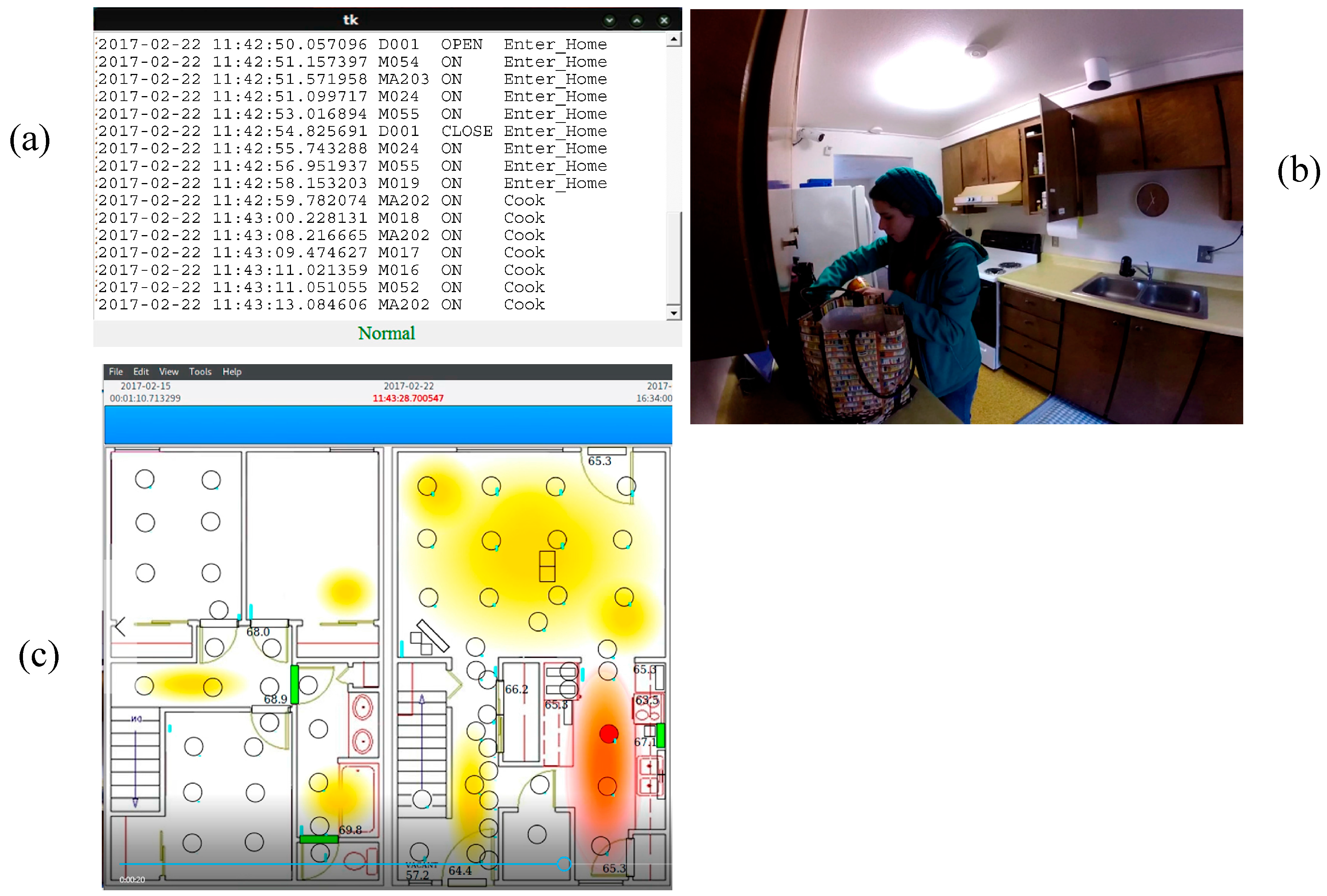
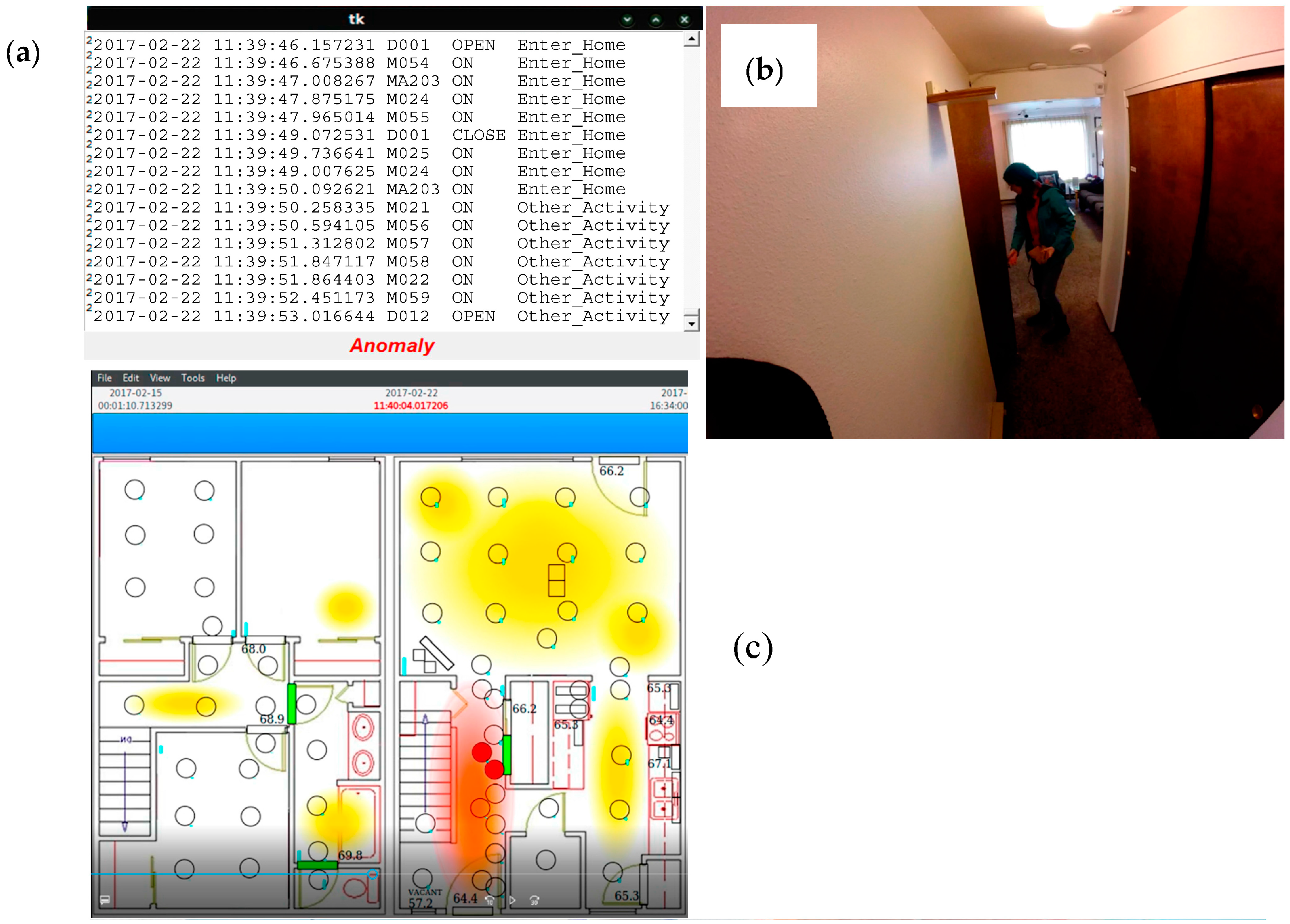
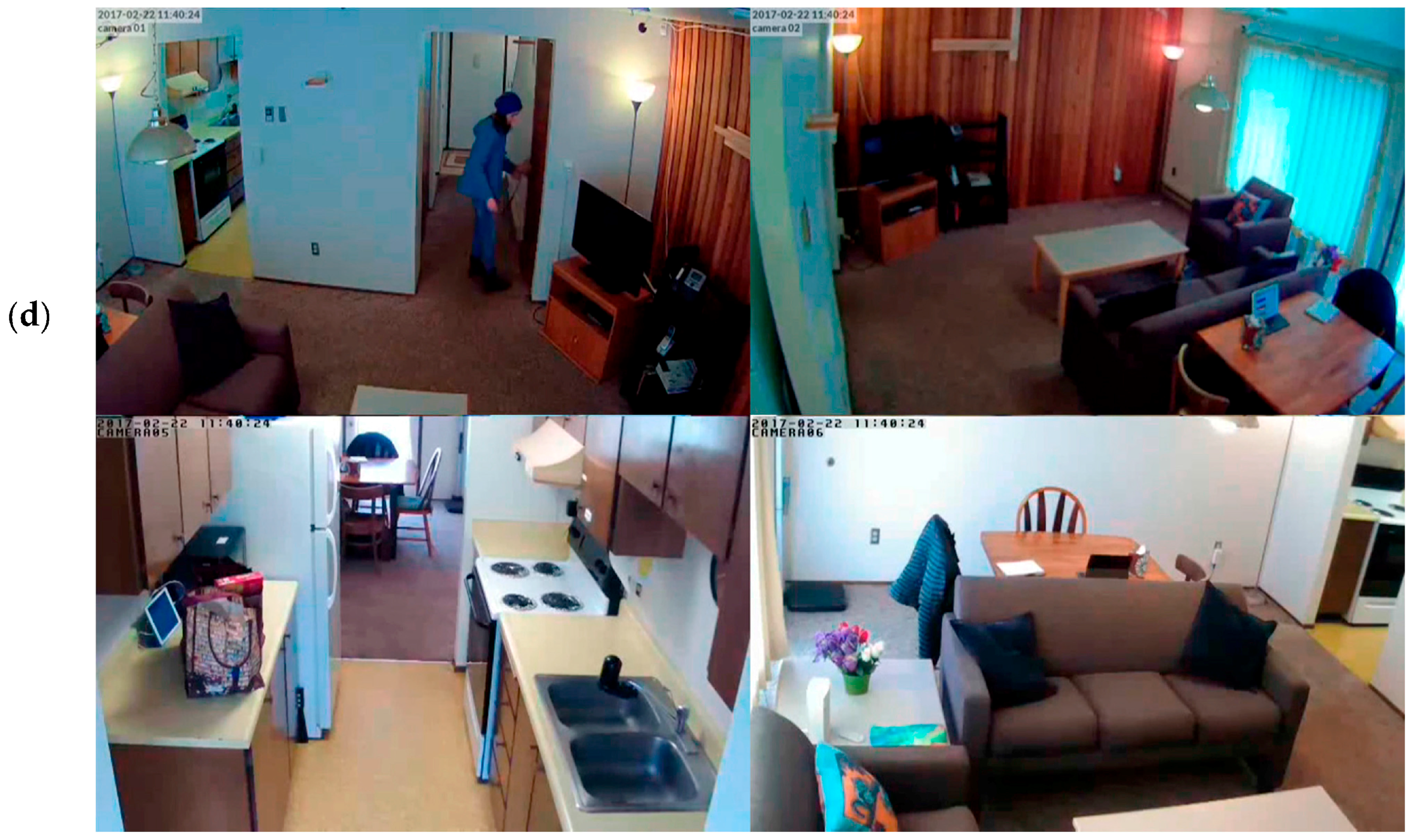
5.3. Security Application
6. Related Approaches to Secure Smart Homes
7. Conclusions
Author Contributions
Conflicts of Interest
References
- Bureau of Labor Statistics. American Time Use Survey. 2016. Available online: http://www.bls.gov/tus/ (accessed on 18 February 2017).
- Hu, Y.; Tilke, D.; Adams, T.; Crandall, A.; Cook, D.J.; Schmitter-Edgecombe, M. Smart home in a box: Usability study for a large scale self-installation of smart home technologies. J. Reliab. Intell. Environ. 2016, 2, 93–106. [Google Scholar] [CrossRef]
- Elfaham, A.; Hagras, H.; Helal, S.; Hossain, S.; Lee, J.; Cook, D.J. A fuzzy based verification agent for the Persim human activity simulator in ambient intelligent environments. In Proceedings of the IEEE International Conference on Fuzzy Systems, Barcelona, Spain, 18–23 July 2010; pp. 1–8. [Google Scholar]
- Cook, D.J.; Das, S. Pervasive computing at scale: Transforming the state of the art. Pervasive Mob. Comput. 2012, 8, 22–35. [Google Scholar] [CrossRef]
- Krishnan, N.; Cook, D.J. Activity recognition on streaming sensor data. Pervasive Mob. Comput. 2014, 10, 138–154. [Google Scholar] [CrossRef] [PubMed]
- Cook, D.J.; Krishnan, N.; Rashidi, P. Activity discovery and activity recognition: A new partnership. IEEE Trans. Syst. Man Cybern. B 2013, 43, 820–828. [Google Scholar] [CrossRef] [PubMed]
- Cook, D.J. Learning setting-generalized activity models for smart spaces. IEEE Intell. Syst. 2012, 27, 32–38. [Google Scholar] [CrossRef] [PubMed]
- Crandall, A.; Cook, D.J. Behaviometrics for multiple residents in a smart environment. In Human Aspects in Ambient Intelligence; Atlantis Press: Amsterdam, The Netherlands, 2013; pp. 55–71. [Google Scholar]
- Aggarwal, J.K.; Ryoo, M.S. Human activity analysis: A review. ACM Comput. Surv. 2011, 43, 1–47. [Google Scholar] [CrossRef]
- Chen, L.; Hoey, J.; Nugent, C.D.; Cook, D.J.; Yu, Z. Sensor-based activity recognition. IEEE Trans. Syst. Man Cybern. C Appl. Rev. 2012, 42, 790–808. [Google Scholar] [CrossRef]
- Ke, S.-R.; Thuc, H.L.U.; Lee, Y.-J.; Hwang, J.-N.; Yoo, J.H.; Choi, K.-H. A review on video-based human activity recognition. Computers 2013, 2, 88–131. [Google Scholar] [CrossRef]
- Bulling, A.; Blanke, U.; Schiele, B. A tutorial on human activity recognition using body-worn inertial sensors. ACM Comput. Surv. 2014, 46, 107–140. [Google Scholar] [CrossRef]
- Reiss, A.; Stricker, D.; Hendeby, G. Towards robust activity recognition for everyday life: Methods and evaluation. In Proceedings of the 2013 7th International Conference on Pervasive Computing Technologies for Healthcare, Venice, Italy, 5–8 May 2013; pp. 25–32. [Google Scholar]
- Vishwakarma, S.; Agrawal, A. A survey on activity recognition and behavior understanding in video surveillance. Vis. Comput. 2013, 29, 983–1009. [Google Scholar] [CrossRef]
- Lara, O.; Labrador, M.A. A survey on human activity recognition using wearable sensors. IEEE Commun. Surv. Tutor. 2013, 15, 1192–1209. [Google Scholar] [CrossRef]
- Chen, L.; Khalil, I. Activity recognition: Approaches, practices and trends. In Activity Recognition in Pervasive Intelligent Environments; Chen, L., Nugent, C.D., Biswas, J., Hoey, J., Eds.; Atlantis Ambient and Pervasive Intelligence; Atlantis Press: Amsterdam, The Netherlands, 2011; pp. 1–31. [Google Scholar]
- Tuaraga, P.; Chellappa, R.; Subrahmanian, V.S.; Udrea, O.; Turaga, P. Machine recognition of human activities: A survey. IEEE Trans. Circuits Syst. Video Technol. 2008, 18, 1473–1488. [Google Scholar] [CrossRef]
- Alon, J.; Athitsos, V.; Yuan, Q.; Sclaroff, S. A unified framework for gesture recognition and spatiotemporal gesture segmentation. IEEE Trans. Pattern Anal. Mach. Intell. 2008, 31, 1685–1699. [Google Scholar] [CrossRef] [PubMed]
- Iglesias, J.A.; Angelov, P.; Ledezma, A.; Sanchis, A. Human activity recognition based on evolving fuzzy systems. Int. J. Neural Syst. 2010, 20, 355–364. [Google Scholar] [CrossRef] [PubMed]
- Liao, I.L.; Fox, D.; Kautz, H. Location-based activity recognition using relational Markov networks. In Proceedings of the International Joint Conference on Artificial Intelligence, Edinburgh, UK, 30 July–5 August 2005; pp. 773–778. [Google Scholar]
- Guenterberg, E.; Ghasemzadeh, H.; Jafari, R. Automatic segmentation and recognition in body sensor networks using a hidden Markov model. ACM Trans. Embed. Comput. Syst. 2012, 11, 1–19. [Google Scholar] [CrossRef]
- Doppa, J.R.; Fern, A.; Tadepalli, P. Structured prediction via output space search. J. Mach. Learn. Res. 2014, 15, 1317–1350. [Google Scholar]
- Doppa, J.R.; Fern, A.; Tadepalli, P. HC-Search: Learning heuristics and cost functions for structured prediction. J. Artif. Intell. Res. 2014, 50, 369–407. [Google Scholar]
- Hagras, H.; Doctor, F.; Lopez, A.; Callaghan, V. An incremental adaptive life long learning approach for type-2 fuzzy embedded agents in ambient intelligent environments. IEEE Trans. Fuzzy Syst. 2007, 15, 41–55. [Google Scholar] [CrossRef]
- Munguia-Tapia, E.; Intille, S.S.; Larson, K. Activity recognition in the home using simple and ubiquitous sensors. In Proceedings of the International Conference on Pervasive Computing, Vienna, Austria, 21–23 April 2004; pp. 158–175. [Google Scholar]
- Jarafi, R.; Sastry, S.; Bajcsy, R. Distributed recognition of human actions using wearable motion sensor networks. J. Ambient Intell. Smart Environ. 2009, 1, 103–115. [Google Scholar]
- Junker, H.; Amft, O.; Lukowicz, P.; Groster, G. Gesture spotting with body-worn inertial sensors to detect user activities. Pattern Recognit. 2008, 41, 2010–2024. [Google Scholar] [CrossRef]
- Maurer, U.; Smailagic, A.; Siewiorek, D.; Deisher, M. Activity recognition and monitoring using multiple sensors on different body positions. In Proceedings of the International Workshop on Wearable and Implantable Body Sensor Networks, Cambridge, MA, USA, 3–5 April 2006; pp. 113–116. [Google Scholar]
- Gu, T.; Chen, S.; Tao, X.; Lu, J. An unsupervised approach to activity recognition and segmentation based on object-use fingerprints. Data Knowl. Eng. 2010, 69, 533–544. [Google Scholar] [CrossRef]
- Philipose, M.; Fishkin, K.P.; Perkowitz, M.; Patterson, D.J.; Hahnel, D.; Fox, D.; Kautz, H. Inferring activities from interactions with objects. IEEE Pervasive Comput. 2004, 3, 50–57. [Google Scholar] [CrossRef]
- Gyorbiro, N.; Fabian, A.; Homanyi, G. An activity recognition system for mobile phones. Mob. Netw. Appl. 2008, 14, 82–91. [Google Scholar] [CrossRef]
- Kwapisz, J.; Weiss, G.; Moore, S. Activity recognition using cell phone accelerometers. In Proceedings of the International Workshop on Knowledge Discovery from Sensor Data, Washington, DC, USA, 24–28 July 2010; pp. 10–18. [Google Scholar]
- Candamo, J.; Shreve, M.; Goldgof, D.; Sapper, D.; Kasturi, R. Understanding transit scenes: A survey on human behavior recognition algorithms. IEEE Trans. Intell. Transp. Syst. 2010, 11, 206–224. [Google Scholar] [CrossRef]
- Forster, K.; Monteleone, S.; Calatroni, A.; Roggen, D.; Troster, G. Incremental kNN classifier exploiting correct-error teacher for activity recognition. In Proceedings of the International Conference on Machine Learning and Applications, Washington, DC, USA, 12–14 December 2010; pp. 445–450. [Google Scholar]
- Bao, L.; Intille, S. Activity recognition from user annotated acceleration data. In Proceedings of the International Conference on Pervasive Computing, Vienna, Austria, 7–10 September 2004; pp. 1–17. [Google Scholar]
- Ravi, N.; Dandekar, N.; Mysore, P.; Littman, M.L. Activity recognition from accelerometer data. In Proceedings of the 17th conference on Innovative Applications of Artificial Intelligence, Pittsburgh, PA, USA, 9–13 July 2005; pp. 1541–1546. [Google Scholar]
- Ward, J.A.; Lukowicz, P.; Troster, G.; Starner, T.E. Activity recognition of assembly tasks using body-worn microphones and accelerometers. IEEE Trans. Pattern Anal. Mach. Intell. 2006, 28, 1553–1567. [Google Scholar] [CrossRef] [PubMed]
- Singla, G.; Cook, D.J.; Schmitter-Edgecombe, M. Recognizing independent and joint activities among multiple residents in smart environments. Ambient Intell. Humaniz. Comput. J. 2010, 1, 57–63. [Google Scholar] [CrossRef] [PubMed]
- Lester, J.; Choudhury, T.; Kern, N.; Borriello, G.; Hannaford, B. A hybrid discriminative/generative approach for modeling human activities. In Proceedings of the International Joint Conference on Artificial Intelligence, Edinburgh, UK, 30 July–5 August 2005; pp. 766–772. [Google Scholar]
- Amft, O.; Troster, G. On-body sensing solutions for automatic dietary monitoring. IEEE Pervasive Comput. 2009, 8, 62–70. [Google Scholar] [CrossRef]
- Zhang, M.; Sawchuk, A.A. Motion primitive-based human activity recognition using a bag-of-features approach. In Proceedings of the ACM SIGHIT International Health Informatics Symposium, Miami, FL, USA, 28–30 January 2012; pp. 631–640. [Google Scholar]
- Blanke, U.; Schiele, B.; Kreil, M.; Lukowicz, P.; Sick, B.; Gruber, T. All for one or one for all? Combining heterogeneous features for activity spotting. In Proceedings of the IEEE International Conference on Pervasive Computing and Communications Workshops, Mannheim, Germany, 29 March–2 April 2010; pp. 18–24. [Google Scholar]
- Van Kasteren, T.; Noulas, A.; Englebienne, G.; Krose, B. Accurate activity recognition in a home setting. In Proceedings of the ACM Conference on Ubiquitous Computing, Seoul, Korea, 21–24 September 2008; pp. 1–9. [Google Scholar]
- Bulling, A.; Ward, J.A.; Gellersen, H. Multimodal recognition of reading activity in transit using body-worn sensors. ACM Trans. Appl. Percept. 2012, 9, 2. [Google Scholar] [CrossRef]
- Wang, S.; Pentney, W.; Popescu, A.M.; Choudhury, T.; Philipose, M. Common sense based joint training of human activity recognizers. In Proceedings of the International Joint Conference on Artificial Intelligence, Hyderabad, India, 6–12 January 2007; pp. 2237–2242. [Google Scholar]
- Lester, J.; Choudhury, T.; Borriello, G. A practical approach to recognizing physical activities. In Proceedings of the International Conference on Pervasive Computing, Dublin, Ireland, 7–10 May 2006; pp. 1–16. [Google Scholar]
- Niu, F.; Abdel-Mottaleb, M. HMM-based segmentation and recognition of human activities from video sequences. In Proceedings of the IEEE International Conference on Multimedia and ExpoICME, Amsterdam, The Netherlands, 6–8 July 2005; pp. 804–807. [Google Scholar]
- Duchenne, O.; Laptev, I.; Sivic, J.; Bach, F.; Ponce, J. Automatic annotation of human activities in video. In Proceedings of the International Conference on Computer Vision, Kyoto, Japan, 27 September–4 October 2009; pp. 1491–1498. [Google Scholar]
- Zheng, Y.; Wong, W.-K.; Guan, X.; Trost, S. Physical activity recognition from accelerometer data using a multi-scale ensemble method. In Proceedings of the Innovative Applications of Artificial Intelligence Conference, Bellevue, WA, USA, 14–18 July 2013; pp. 1575–1581. [Google Scholar]
- Hong, X.; Nugent, C.D. Segmenting sensor data for activity monitoring in smart environments. Pers. Ubiquitous Comput. 2013, 17, 545–559. [Google Scholar] [CrossRef]
- Palmes, P.; Pung, H.K.; Gu, T.; Xue, W.; Chen, S. Object relevance weight pattern mining for activity recognition and segmentation. Pervasive Mob. Comput. 2010, 6, 43–57. [Google Scholar] [CrossRef]
- Yamasaki, T.; Aizawa, K. Motion segmentation and retrieval for 3D video based on modified shape distribution. EURASIP J. Appl. Signal Process. 2007, 2007, 211. [Google Scholar] [CrossRef]
- Keogh, E.; Chu, S.; Hart, D.; Pazzani, M. An online algorithm for segmenting time series. In Proceedings of the IEEE International Conference on Data Mining, San Jose, CA, USA, 29 November–2 December 2001; pp. 289–296. [Google Scholar]
- Crandall, A.; Cook, D.J. Coping with multiple residents in a smart environment. J. Ambient Int. Smart Environ. 2009, 1, 323–334. [Google Scholar]
- Seymore, K.; McCallum, A.; Rosenfeld, R. Learning Hidden Markov Model Structure for Information Extraction. In Proceedings of the AAAI Workshop on Machine Learning for Information Extraction, Orlanda, FL, USA, 18–22 July 1999. [Google Scholar]
- Christiansen, H.; Dahmcke, C.M. A machine learning approach to test data generation: A case study in evaluation of gene finders. In Proceedings of the Machine Learning and Data Mining in Pattern Recognition, Leipzig, Germany, 18–20 July 2007. [Google Scholar]
- Wang, H.-C. Modeling idea generation sequences using hidden Markov models. In Proceedings of the Annual Meeting of the Cognitive Science Society, Washington, DC, USA, 23–26 July 2008; pp. 107–112. [Google Scholar]
- Degottex, G.; Lanchantin, P.; Gales, M.J.F. A pulse model in log-domain for a uniform synthesizer. In Proceedings of the Speech Synthesis Workshop, Sunnyvale, CA, USA, 13–15 September 2016. [Google Scholar]
- Thomas, B.; Crandall, A. A demonstration of PyViz, a flexible smart home visualization tool. In Proceedings of the IEEE International Conference on Pervasive Computing and Communication, Seattle, WA, USA, 21–25 March 2011. [Google Scholar]
- Chandola, V.; Banerjee, A.; Kumar, V. Anomaly detection: A survey. ACM Comput. Surv. 2009, 41, 1–15. [Google Scholar] [CrossRef]
- Ali, H.; Amalarethinam, D.G. Detecting abnormality in activites performed by people with dementia in smart environment. Int. J. Comput. Sci. Inf. Technol. 2014, 5, 2453–2457. [Google Scholar]
- Dawadi, P.; Cook, D.J.; Schmitter-Edgecombe, M. Automated clinical assessment from smart home-based behavior data. IEEE J. Biomed. Health Inform. 2016, 20, 1188–1194. [Google Scholar] [CrossRef] [PubMed]
- Mahmoud, S.; Lotfi, A.; Langensiepen, C. Abnormal Behaviours Identification for An Elder’s Life Activities using Dissimilarity Measurements Location based Anomaly Focus on Different Distance Measures. In Proceedings of the International Conference on Pervasive Technologies Related to Assistive Environments, Heraklion, Crete, Greece, 25–27 May 2011; p. 25. [Google Scholar]
- Dodge, H.H.; Mattek, N.C.; Austin, D.; Hayes, T.L.; Kaye, J.A. In-home walking speeds and variability trajectories associated with mild cognitive impairment. Neurology 2012, 78, 1946–1952. [Google Scholar] [CrossRef] [PubMed]
- Das, B.; Cook, D.J.; Krishnan, N.; Schmitter-Edgecombe, M. One-class classification-based real-time activity error detection in smart homes. IEEE J. Sel. Top. Signal Process. 2016, 10, 914–923. [Google Scholar] [CrossRef] [PubMed]
- Liu, F.T.; Ting, K.M.; Zhou, Z.-H. Isolation forest. In Proceedings of the IEEE International Conference on Data Mining, Pisa, Italy, 15–19 December 2008; pp. 413–422. [Google Scholar]
- Guha, S.; Mishra, N.; Roy, G.; Schrijvers, O. Robust random cut forest based anomaly detection on streams. In Proceedings of the International Conference on Machine Learning, New York, NY, USA, 19–24 June 2016; pp. 2712–2721. [Google Scholar]
- Chitnis, S.; Deshpande, N.; Shaligram, A. An investigative study for smart home security: Issues, challenges and countermeasures. Wirel. Sens. Netw. 2016, 8, 61–68. [Google Scholar] [CrossRef]
- Ring. Never Miss a Visitor. With Ring, You’re always Home. 2016. Available online: https://ring.com/ (accessed on 18 February 2017).
- Icontrol Networks. Home Security. 2016. Available online: https://getpiper.com/howitworks/ (accessed on 18 February 2017).
- Zhuang, X.; Huang, J.; Potamianos, G.; Hasegawa-Johnson, M. Acoustic fall detection using Gaussian mixture models and GMM supervectors. In Proceedings of the IEEE International Conference on Acoustics, Speech, and Signal Processing, Taipei, Taiwan, 19–24 April 2009; pp. 69–72. [Google Scholar]
- Moncrieff, S.; Venkatesh, S.; West, G.; Greenhill, S. Multi-modal emotive computing in a smart house environment. Pervasive Mob. Comput. 2007, 3, 79–94. [Google Scholar] [CrossRef]
- Jain, A.K.; Nandakumar, K. Biometric authentication: System security and user privacy. IEEE Comput. 2012, 45, 87–92. [Google Scholar] [CrossRef]
- Euronews. Smarter Home Security Camera Recognises Intrduers Says Maker. 2016. Available online: http://www.euronews.com/2016/08/03/smarter-home-security-camera-recognises-intruders-says-maker (accessed on 18 February 2017).
- Andersson, V.; Dutra, R.; Araujo, R. Anthropometric and human gait identification using skeleton data from Kinect sensor. In Proceedings of the ACM Symposium on Applied Computing, Gyeongju, Korea, 24–28 March 2014; pp. 60–61. [Google Scholar]
- Helal, A.; Mann, W.; Elzabadani, H.; King, J.; Kaddourah, Y.; Jansen, E. Gator Tech Smart House: A Programmable pervasive space. IEEE Comput. Mag. 2005, 38, 64–74. [Google Scholar] [CrossRef]
- Jenkins, J.; Ellis, C. Using ground reaction forces from gait analysis: Body mass as a weak biometric. In Proceedings of the International Conference on Pervasive Computing, Birmingham, UK, 26–27 July 2007; pp. 251–267. [Google Scholar]
- Watanabe, K.; Kurihara, Y.; Tanaka, H. Ubiquitous health monitoring at home-sensing of human biosignals on flooring, on tatami mat, in the bathtub, and in the lavatory. IEEE Sens. J. 2009, 9, 1847–1855. [Google Scholar] [CrossRef]
- Cuddihy, P.; Weisenberg, J.; Graichen, C.; Ganesh, M. Algorithm to automatically detect abnormally long periods of inactivity in a home. In Proceedings of the ACM SIGMOBILE International Workshop on Systems and Networking Support for Healthcare and Assisted Living Environments, San Juan, Puerto Rico, 11–14 June 2007; pp. 89–94. [Google Scholar]
- Aran, O.; Sanchez-Cortes, D.; Do, M.T.; Gatica-Perez, D. Anomaly detection in elderly daily behavior in ambient sensing environments. In Proceedings of the International Workshop on Human Behavior Understanding Human Behavior Understanding, Amstederman, The Netherlands, 16 October 2016; pp. 51–67. [Google Scholar]
- Virone, G. Assesing everday life behavioral rythms for the older generation. Pervasive Mob. Comput. 2009, 5, 606–622. [Google Scholar] [CrossRef]
- Novak, M.; Jakab, F.; Lain, L. Anomaly detection in user daily patterns in smart-home environment. J. Sel. Areas Health Inform. 2013, 3, 1–11. [Google Scholar]
- Ordonez, F.; de Toldeo, P.; Sanchis, A. Sensor-based Bayesian detection of anomalous living patterns in a home setting. Pers. Ubiquitous Comput. 2015, 19, 259–270. [Google Scholar] [CrossRef]
- Teoh, C.; Tan, C. A neural network approach towards reinforcing smart home security. In Proceedings of the Asia-Pacific Symposium on Information and Telecommunication Technologies, Kuching, Malaysia, 15–18 June 2010. [Google Scholar]
- Aicha, A.N.; Englebienne, G.; Krose, B. Modeling visit behaviour in smart homes using unsupervised learning. In Proceedings of the ACM Conference on Ubiquitous Computing, Seattle, WA, USA, 13–17 September 2014; pp. 1193–1200. [Google Scholar]
- Han, Y.; Han, M.; Lee, S.; Sarkar, A.M.J.; Lee, Y.-K. A framework for supervising lifestyle diseases using long-term activity monitoring. Sensors 2012, 12, 5363–5379. [Google Scholar] [CrossRef] [PubMed]
- Williams, J.; Cook, D. Forecasting behavior in smart homes based on past sleep and wake patterns. Technol. Health Care 2017, 25, 89–110. [Google Scholar] [CrossRef] [PubMed]
- Mocanu, I.; Florea, A.M. A model for activity recognition and emergency detection in smart environments. In Proceedings of the International Conference on Ambient Computing, Applications, Services and Technologies, Barcelona, Spain, 23–29 October 2011; pp. 13–19. [Google Scholar]
- Cardinaux, F.; Brownsell, S.; Hawley, M.; Bradley, D. Modelling of behavioural patterns for abnormality detection in the context of lifestyle reassurance. Prog. Pattern Recognit. Image Anal. Appl. 2008, 5197, 243–251. [Google Scholar]
- Elbert, D.; Storf, H.; Eisenbarth, M.; Unalan, O.; Schmitt, M. An approach for detecting deviations in daily routine for long-term behavior analysis. In Proceedings of the 2011 5th International Conference on Pervasive Computing Technologies for Healthcare (Pervasive Health), Dublin, Ireland, 23–26 May 2011; pp. 426–433. [Google Scholar]
- Mori, T.; Fujii, A.; Shimosaka, M.; Noguchi, H.; Sato, T. Typical behavior patterns extraction and anomaly detection algorithm based on accumulated home sensor data. In Proceedings of the Conference on Future Generation Communication and Networking, Jeju Island, Korea, 6–8 December 2007. [Google Scholar]









{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Domain | Number | Types of Features |
|---|---|---|
| Raw Sensor data | 4 types | infrared motion (ON/OFF); magnetic door (OPEN/CLOSE); ambient light (continuous); ambient temperature (continuous) |
| Timing features | 3 features | day of week; hour of day; seconds past midnight |
| Window features | 9 features | most recent sensor in window; first sensor in window; window duration; most frequent sensors from previous two windows; last sensor location in window; last motion sensor location in window; entropy-based data complexity of window; time elapsed since last sensor event in window |
| Sensor features (n sensors in home) | 2n features | count of events for each sensor in window; elapsed time for each sensor since last event |
| Dataset | Features | Average TPR | Average FPR | AUC |
|---|---|---|---|---|
| B1 | f.standard | 1.0000 | 0.0008 | 0.73 |
| f.activity | 1.0000 | 0.0021 | 0.68 | |
| f.all | 1.0000 | 0.0008 | 0.87 | |
| B2 | f.standard | 0.8000 | 0.0021 | 0.49 |
| f.activity | 0.5000 | 0.0032 | 0.42 | |
| f.all | 1.0000 | 0.0011 | 0.79 | |
| B3 | f.standard | 0.4500 | 0.0044 | 0.47 |
| f.activity | 0.7000 | 0.0040 | 0.40 | |
| f.all | 0.8500 | 0.0038 | 0.47 |
| True Positives | False Positives | True Negatives | False Negatives |
|---|---|---|---|
| 2 | 5 | 756 | 0 |
© 2017 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Dahmen, J.; Thomas, B.L.; Cook, D.J.; Wang, X. Activity Learning as a Foundation for Security Monitoring in Smart Homes. Sensors 2017, 17, 737. https://doi.org/10.3390/s17040737
Dahmen J, Thomas BL, Cook DJ, Wang X. Activity Learning as a Foundation for Security Monitoring in Smart Homes. Sensors. 2017; 17(4):737. https://doi.org/10.3390/s17040737
Chicago/Turabian StyleDahmen, Jessamyn, Brian L. Thomas, Diane J. Cook, and Xiaobo Wang. 2017. "Activity Learning as a Foundation for Security Monitoring in Smart Homes" Sensors 17, no. 4: 737. https://doi.org/10.3390/s17040737
APA StyleDahmen, J., Thomas, B. L., Cook, D. J., & Wang, X. (2017). Activity Learning as a Foundation for Security Monitoring in Smart Homes. Sensors, 17(4), 737. https://doi.org/10.3390/s17040737