1. Introduction
An important bottleneck in current broadband wireless communication systems is spectrum scarcity. Among the proposals to address this issue, the continuous sensing of particular spectrum bands in order to detect the so-called white spaces is quite promising. Users that otherwise would not be able to communicate can leverage this knowledge to opportunistically use the available spectrum portions. The sensing stage here is of paramount importance and, in this context, it is implemented by devices with built-in antenna (or antenna array), down converters, analog-to-digital converters (ADCs), and digital processors that are fed by the resulting digital samples and may perform additional expert processing. The devices capable of performing those tasks are called cognitive radio (CR) nodes; in fact, following an intelligent sensing framework, the main challenges regarding spectrum sensing by CR nodes can be cast within the digital signal processing context, as will be further clarified.
Current wireless communication models state new ecosystems such as 5G in order to integrate different wireless communication solutions into a unified structure that connects people, machines and devices on a massive scale, besides offering a variety of ubiquitous services and applications [
1]. In order to favor this model, the shared use of radio spectrum resources is also promoted [
2] by providing alternatives for the coexistence of non-coordinated heterogeneous wireless systems operating in the same band. At this point, spectrum sensing is the first stage of the dynamic spectrum access cycle that enables a virtually harmless coexistence. The basic functioning principle of this solution relies on a usually unlicensed or secondary user (SU), capable of observing whether a specific frequency band is being utilized by a primary, or licensed, user (PU). If the frequency band is available, then the secondary user can occupy it without interfering with primary terminals. In addition, if the authorized terminal restarts transmission, the secondary terminal jumps off into a different band, or modifies its transmission scheme, while staying in the same frequency band, in order to minimize interference [
3,
4,
5]. Several wireless technologies such as Zigbee, WiFi and Bluetooth already coexist in unlicensed bands (i.e., Industrial, Scientific and Medical (ISM) bands), employing spectrum sensing as a listen-before-talk strategy in order to minimize mutual interferences in the spectrum sharing scenario. In addition, other wireless schemes such as Long Term Evolution (LTE)-unlicensed extend LTE to unlicensed spectrum by aggregating unlicensed carriers with licensed ones through carrier aggregation or solely operating in unlicensed bands [
6], where spectrum sensing will play an important role. Lastly, we can also mention the recently emerged concept named licensed shared access (LSA) [
7,
8]. LSA is a supervised shared access proposal based on an exclusive regime of spectrum sharing among incumbents—i.e., PUs, which have the right to commercially exploit a given wireless spectrum portion—and LSA licensees—i.e., licensed users that leased an incumbent’s spectrum band, which can then be used when permission is granted. The entity responsible for granting permissions is a denominated LSA controller, whose decisions are taken based on spectrum availability information provided by incumbents to the LSA repositories [
9]. In this context, spectrum sensing technologies facilitate the decisions of LSA controllers by providing LSA repositories with dynamic and up-to-date radio-environment maps (REMs) [
1,
10]. More specifically, this dynamic knowledge and update of REMs is acquired via processing of spectrum measurements collected from intelligent sensors, consisting of measurement-capable devices (MCDs) with geo-location information.
A plethora of spectrum sensing techniques can be found in the literature, where energy detection (ED) plays a key role in low-complexity applications due to its inherent computational simplicity in terms of implementation and no need of prior information about PUs [
5,
11,
12,
13,
14]. Variants of the ED technique, including adaptive ED solutions, have been proposed in order to address those cases in which the conventional energy detector is unreliable due to environmental circumstances, such as insufficient signal strength, rapid noise-power fluctuations, or background interferences [
15,
16]. Whenever possible, cooperative strategies are employed to increase the detection reliability in either centralized or distributed manners [
17,
18]. In this context, distributed least-mean-squares (LMS)-based algorithms have been widely employed for adaptive ED purposes [
19,
20,
21,
22,
23,
24]. Commonplace among those skeptical researchers and practitioner engineers is the fact that most of the works in this area are analyzed from theoretical and simulation viewpoints solely, thus relying on several assumptions and simplifications which, eventually, lead to conclusions that do not necessarily meet the requirements imposed by real propagation environments. Exceptions to this rule include [
25,
26] and references therein, which consider some practical issues of conventional ED, and [
27,
28,
29], which consider practical opportunistic spectrum access from a cross-layer perspective, analyzing medium access control (MAC) and other layers of the protocol stack.
In this work, we analyze the distributed LMS-based ED technique proposed in [
24] from a practical viewpoint. In theoretical works, environment parameters, such as signal-to-noise ratio (SNR) and noise variance, are initially fixed to analyze the performance of the algorithm. Based on those predefined values, the step-size of the LMS algorithm, which controls the convergence speed of the algorithm, is accordingly chosen. In real scenarios, shadowing due to moving objects or people along with other environmental impairments make the environment time-varying. As a consequence, those parameters which are considered constant in theoretical works are no longer time-invariant and must be updated online. These reasons motivated this work to deal with the implementation issues of the previously-proposed adaptive ED algorithm and present a new practical proposal of the theoretical LMS-based ED algorithm. The proposed modifications make the original algorithm practical to work with minimal tuning in heterogeneous wireless scenarios. In addition, an empirical assessment and validation with a software defined radio (SDR)-based hardware implementation is carried out.
Thus, the main contributions of the paper are: (1) a new proposal of a variable step-size (VSS) LMS ED algorithm which computes online the step-size in order to ensure the convergence of the adaptive solution proposed in [
24] for time-varying SNR environments; (2) practical solutions for noise variance and SNR estimations as well as data sharing; (3) implementation guidelines of the VSSLMS-based ED algorithm for single-node and cooperative modes; (4) an implementation of the practical VSSLMS-based ED scheme in an SDR-based framework using Universal Software Radio Peripheral (USRP) platforms for both single-node and cooperative ED; and, finally; (5) the evaluation of the sensing system using lab measurements in a real indoor radio-propagation scenario.
The ED-based sensing methodology proposed in this paper pursues an actual seamless monitoring of the radio environment through the received electromagnetic signal strength processing in MCDs (i.e., USRP devices). The ED-based sensing solutions are given for stand-alone or cooperative modes, in which the latter provides a more accurate and reliable monitoring in areas with low SNR. The described sensing procedure can be employed for different purposes such as opportunistic spectrum access in spectrum sharing scenarios or generation of REMs.
The paper is organized as follows.
Section 2 briefly reviews the LMS-based ED algorithm proposed in [
24];
Section 3 deals with the three main implementation issues of the algorithm, namely noise variance and SNR estimation, variable step-size computation, and cooperative issues; in
Section 4, the SDR-based testbench is described. The results corresponding to the lab measurements and further discussions are presented in
Section 5, in which transient and steady-state analyses are firstly performed in
Section 5.1, while the detection performance for different schemes is analyzed in
Section 5.2. Finally, conclusions are drawn in
Section 6.
2. Review of Adaptive ED Algorithm
Let us consider a cognitive radio network where secondary users spatially distributed perform spectrum sensing in a selected frequency band in order to detect the presence of licensed or primary users. The primary-user signal and the input noise at the secondary-user receiver are assumed random and zero-mean Gaussian distributed with covariance matrices
and
, respectively. Thus, the received signal
can be expressed as
where
is the PU signal,
denotes the input noise, and
works as a selector of the environment characteristic under the hypotheses
(absence of PU signal, i.e.,
) and
(presence of PU signal, i.e.,
). The energy detector of the
m-th secondary user computes a local test statistic
from
N received samples at the time slot
k as
The local test statistic is then used to compute an adaptive LMS-based test statistic (cf. [
24] for more details), which can then be employed in both cooperative and single-node contexts. As a result, the update equation of the test statistic
to be used in a distributed detection process at the
m-th SU can be expressed as
where
represents the adaptive filter input associated with the
i-th neighboring user within the neighborhood of the
m-th user, denoted as
. It is worth noticing that (
3) is the generalized expression for single-node and distributed cooperative detection. When cooperation is possible, the LMS-based test statistic uses the local test statistics obtained from the
m-th node and their neighboring SUs, i.e.,
. When single-node operation is chosen, the LMS-based test statistic uses only the test statistic of the
m-th SU, i.e.,
since
. The value
is the threshold over the test statistic
for a predefined probability of false alarm
. In general,
can be computed by considering
as being Gaussian distributed, a reasonable approximation for sufficiently high
N in practice [
24,
30]. The parameter
represents the step-size of the adaptive algorithm and the output-error coefficient
is computed as
where
, with
being the desired signal, which can be computed at each instant
k as
in which
is a scalar close to but less than 1 (
is widely used). Moreover, the coefficients
must satisfy
and are chosen in order to perform uniform or weighted cooperation. When cooperation is uniform, weights are computed as
. Weighted cooperation is carried out as a function of parameters such as number of linked nodes [
31], noise variance, or SNR estimates [
24]. The selection of the weighted strategy shall depend on the available shared information from the neighbors at the
m-th SU.
Following the update process in (
3), the detection test is then performed:
where
is the new detection threshold for the neighborhood
. Assuming that the distribution of
at steady state can be approximated to a Gaussian distribution [
24], we can express the probability of false alarm of the detector for a certain threshold
as
where
and
are the expectation and variance of
, respectively, when hypothesis
holds. The derivations of those values can be found in [
24]. The
Q-function is defined as
.
Consequently, from (
7), the threshold
can be obtained for a predefined
as
4. Experimental SDR Testbench
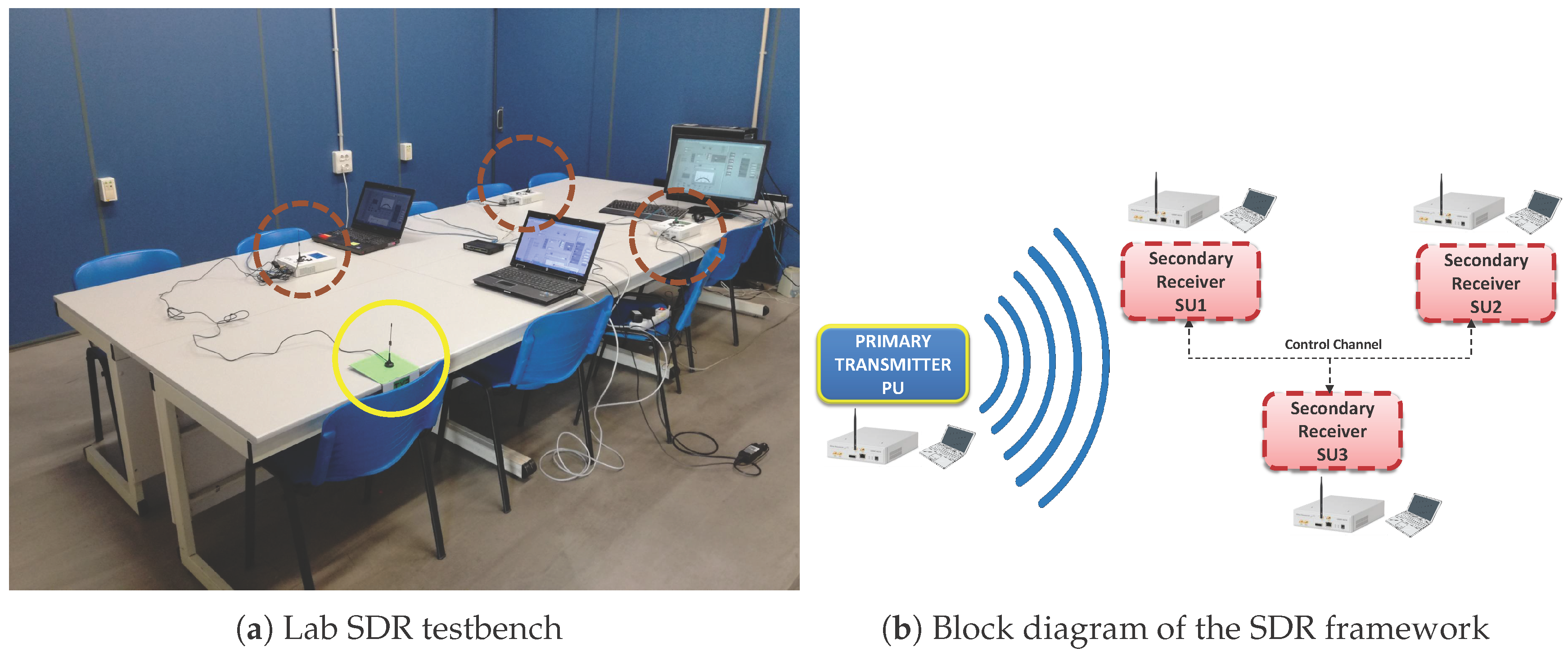
The adaptive VSSLMS-based ED algorithm has been implemented by using three USRP devices (N-210 + Radio frequency (RF) daughterboard WBX, Ettus Research) and the LabVIEW software (version 14.0f1 (32 bits), National Instruments Corporation, Austin, TX, USA). The setup consists of 1 PU, which can transmit in a random manner maintaining each hypothesis state active during a minimum length, and 3 SUs, which can sense the environment in both single-node or cooperative modes. As shown in
Figure 4, each transmitter or receiver antenna is connected to one USRP platform, which is controlled with LabVIEW software via Ethernet from one laptop or computer. All equipments are interconnected using Ethernet as a control channel in order to share data in cooperative mode. In
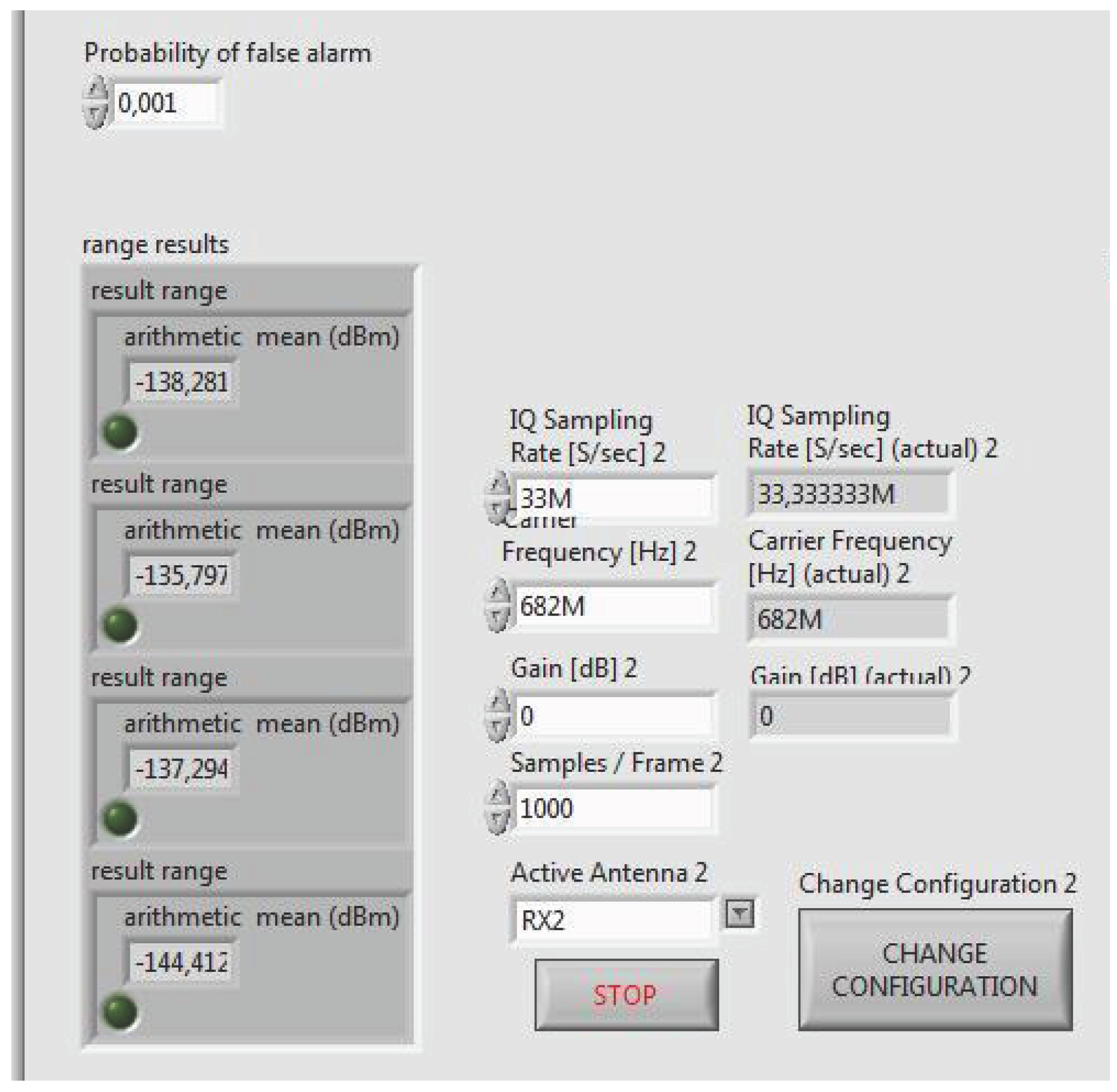
Figure 5 and
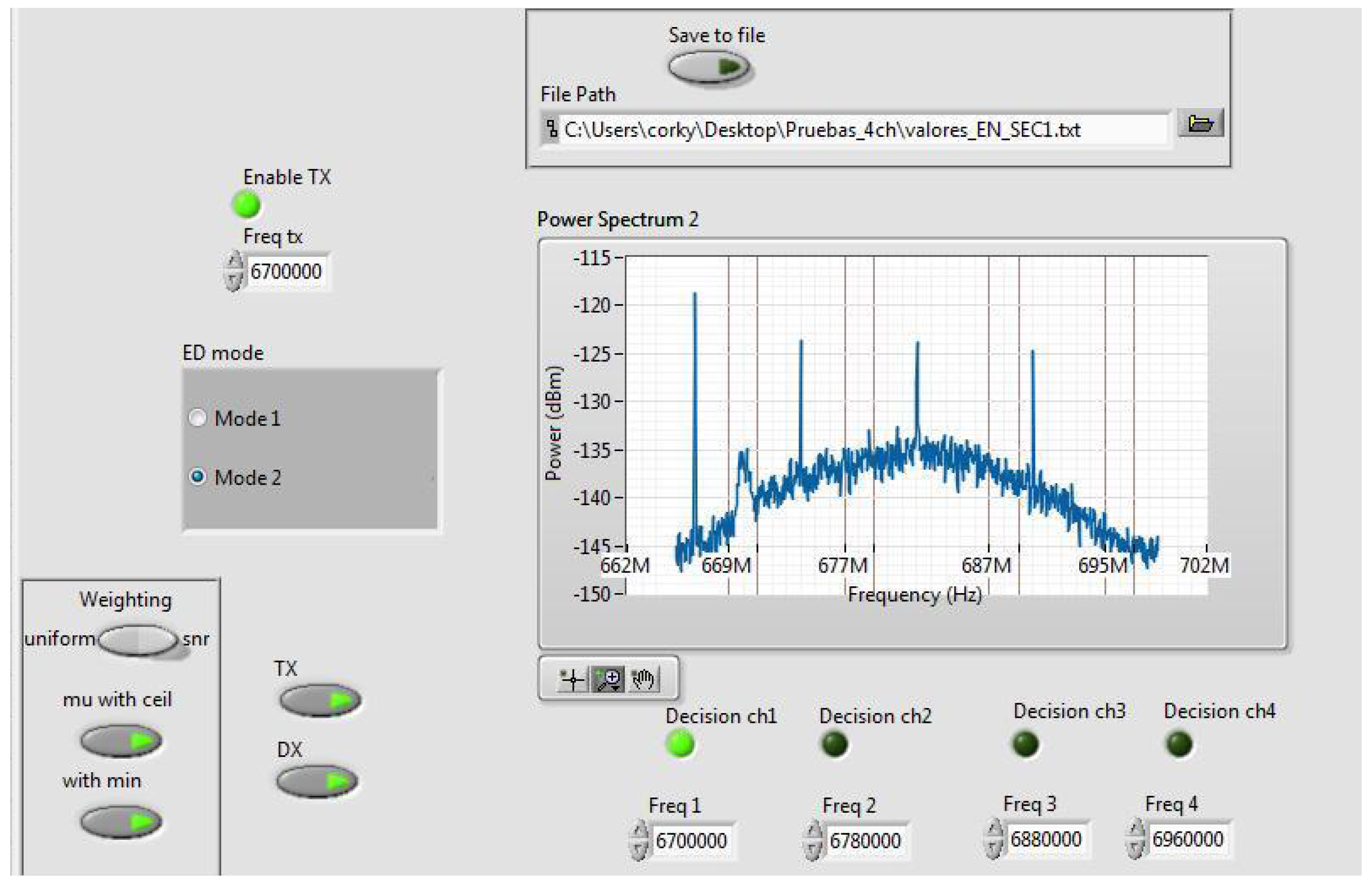
Figure 6, different parts of the LabVIEW control panel, used to configure the USRP device, are shown. From the panel in
Figure 5, data acquisition physical layer (PHY) parameters can be controlled and target
can be selected. USRPs receive IQ data with 33.3 MSamples/s centered at 682 MHz. IQ data stream is split into frames of 1000 time-domain samples to be converted to frequency domain. Furthermore, detection thresholds are also displayed for the selected channels. In
Figure 6, we can set up the VSS in (
12), PU/SU roles of the USRP, weighting strategy in cooperative mode, ED modes (single-node mode or cooperative mode), channel frequencies, and saving data. Additionally, the panel displays the power spectrum and the ED decisions for the selected channels.
The PU transmitter and SU receivers are operating in white spaces of the television (TV) band, i.e., free channels within the TV band (470–794 MHz). The receiver collects
samples in the frequency domain from the selected channel bandwidth and computes the local energy estimates. The generated data traffic from PU consists of video transmission. The pre-defined probability of false alarm is fixed to 0.001. The hardware configuration and the parameter setting of the PHY layer of PU and SUs are summarized in
Table 2. The selected channel is free of external RF interfering sources since they have been chosen from TV white spaces at that location. The minimum time length of each hypothesis is 10 s. In cooperative mode, the variables shown in
Table 1 are shared with all users.
5. Results and Discussion
In this section, the proposed practical solutions in
Section 3 are analyzed through lab measurements with the previously detailed SDR-based hardware implementation. Firstly, we assess in
Section 5.1 how the transient-state affects the overall performance of the algorithm for different environments compared with the steady-state performance in terms of
and
. Additionally, a comparison with the conventional ED method is also performed. In
Section 5.2, the performances of the algorithm in real conditions are presented and compared with a theoretical benchmark for single-node and two-node cooperative ED.
5.1. Transient and Steady State Analysis
As we have seen previously, the length of transient states highly depends on the SNR at hypothesis
. We have analyzed this behavior in
Figure 7 and
Figure 8 using single-node detection in different environments where SNR varies in the ranges
dB and
dB, respectively. The performance values in terms of
and
are shown in
Table 3, where we have computed the overall detection performance and probability of false alarm, both in steady state, i.e.,
and
after the adaptive ED algorithm converges. In addition, we have compared the results with conventional ED.
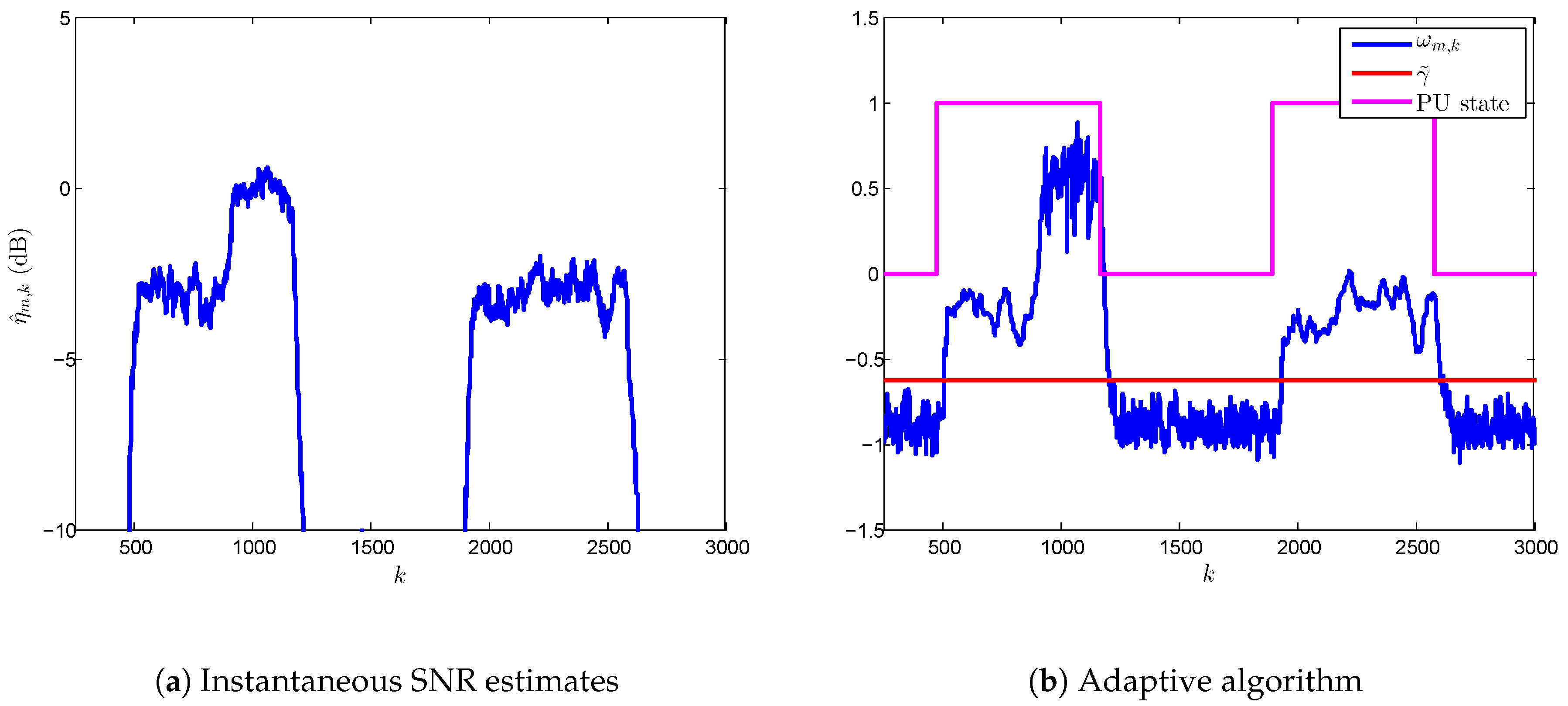
If we pay attention to
Figure 7, we can see how the VSSLMS-based ED algorithm adapts their values to the time-varying nature of a receiving signal in real conditions. In addition, we observe that the transient state can be neglected compared with the steady state. In this sense, this effect is confirmed with results from
Table 3 for the SNR range
dB; transient state is similar in
and
, and, consequently, the overall
and
are slightly increased and reduced, respectively. The ratio of false alarm is increased
and
compared with the traditional ED and steady-state
, respectively. In contrast, the
performance is much higher than conventional ED despite the
degradation induced by the transient state.
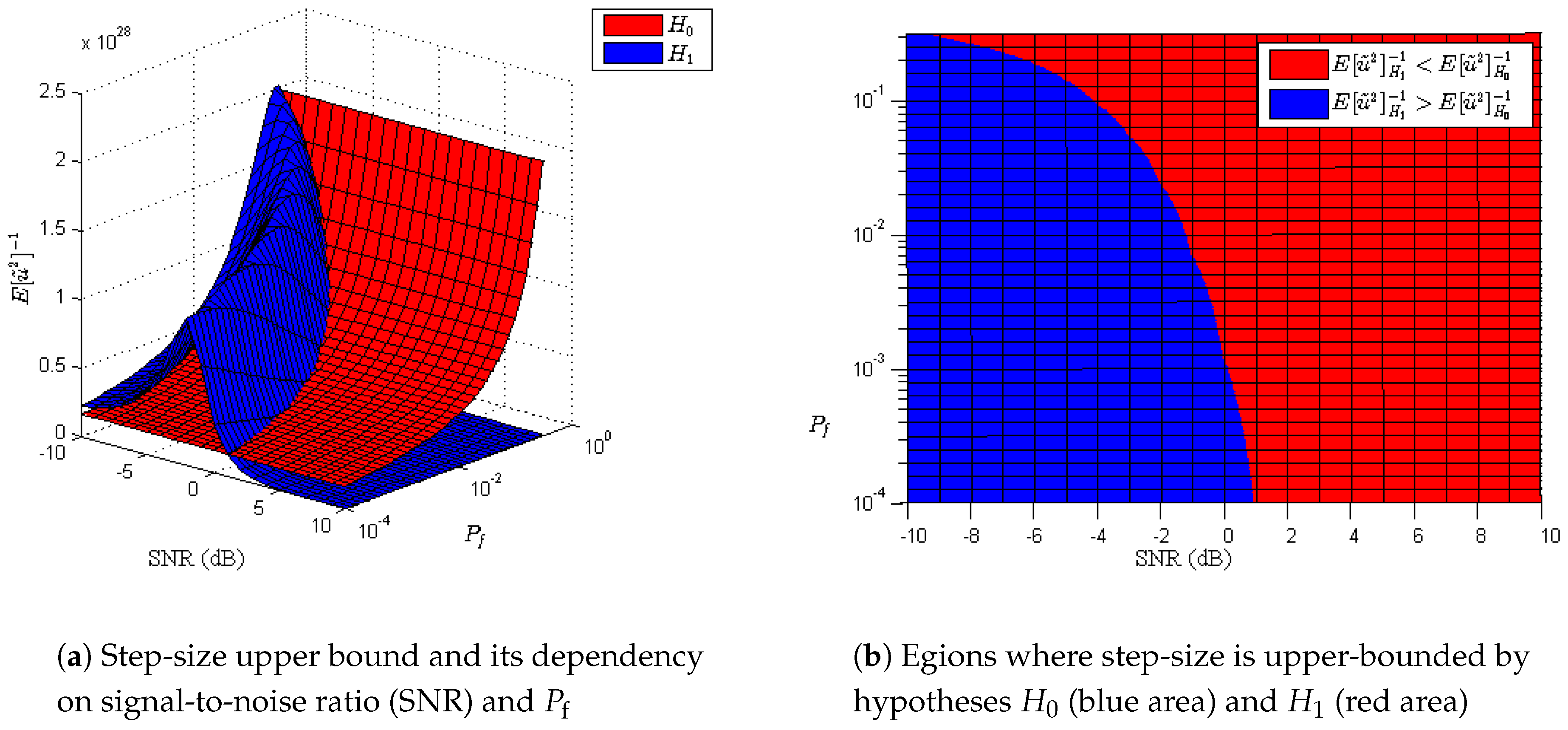
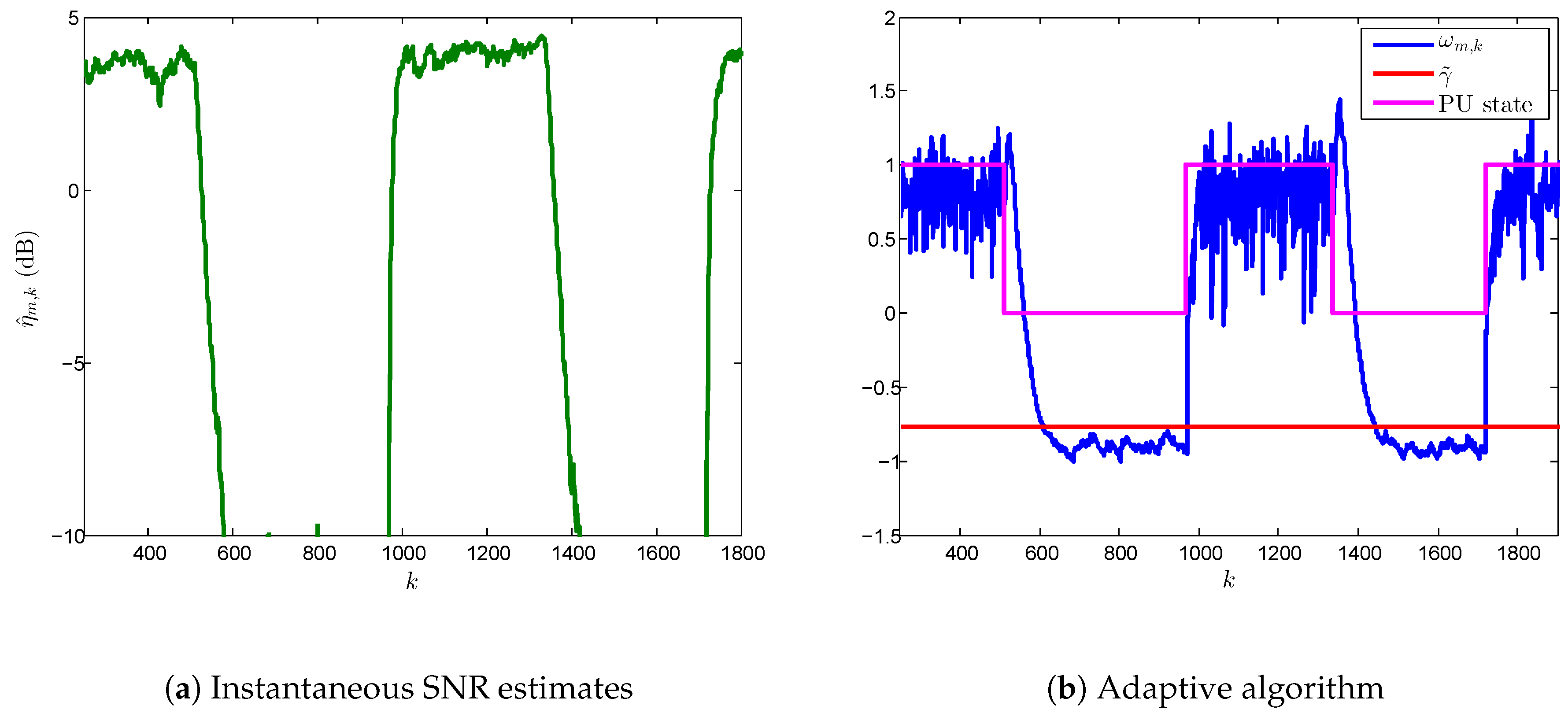
In
Figure 8, we have measured time-varying PU signals in the interval
dB. On one hand, one can see that the transient state is much longer now than the one in
Figure 7, thus inducing a degradation of
and
empirical values. As we have observed in
Figure 2, a greater value of SNR leads to a major difference between the transient state lengths of the
and
. In this context, that behavior can be observed in
Figure 8b where transient state in
is longer than
. Hence, the effect on the overall performance cannot be neglected compared with steady state, as shown in
Table 3. This situation generates an important increase of
(0.236) compared with the false alarm in steady-state (0.000) or in the conventional ED (0.013). It is worth noticing that both VSSLMS-based ED algorithm and conventional ED technique do not reach the target
(i.e., 0.001), the former due to transient-state behavior and the latter due to the error at the noise variance estimation (The error in the noise variance estimation also affects the VSSLMS-based ED algorithm. However, its effect into the overall performance is negligible compared with that arisen from transient behavior.).
As a final remark, we can highlight that the practical proposal outperforms by far the conventional ED technique in low SNRs. However, despite the performance in SNRs above the interval dB being better than conventional ED, their values are similar since traditional ED achieves good results in high SNRs. Furthermore, in adaptive ED is highly affected by transient states, providing an inefficient use of the idle channel. In this sense, a blended solution which could switch between adaptive and conventional ED for low and high SNRs, respectively, would be an interesting strategy to deal with all types of environments.
5.2. Detection Performance in Real Environments
In this subsection, the performance of the proposed practical VSSLMS algorithm is analyzed for single-node and cooperative ED detections in real propagation conditions. Conventional ED performance is also empirically measured. The experimental results are compared with theoretical simulation-based results employing MATLAB (Version R2012b, MathWorks, Natick, MA, USA). Theoretical results are computed using the same parameters as in the experimental setup for iterations.
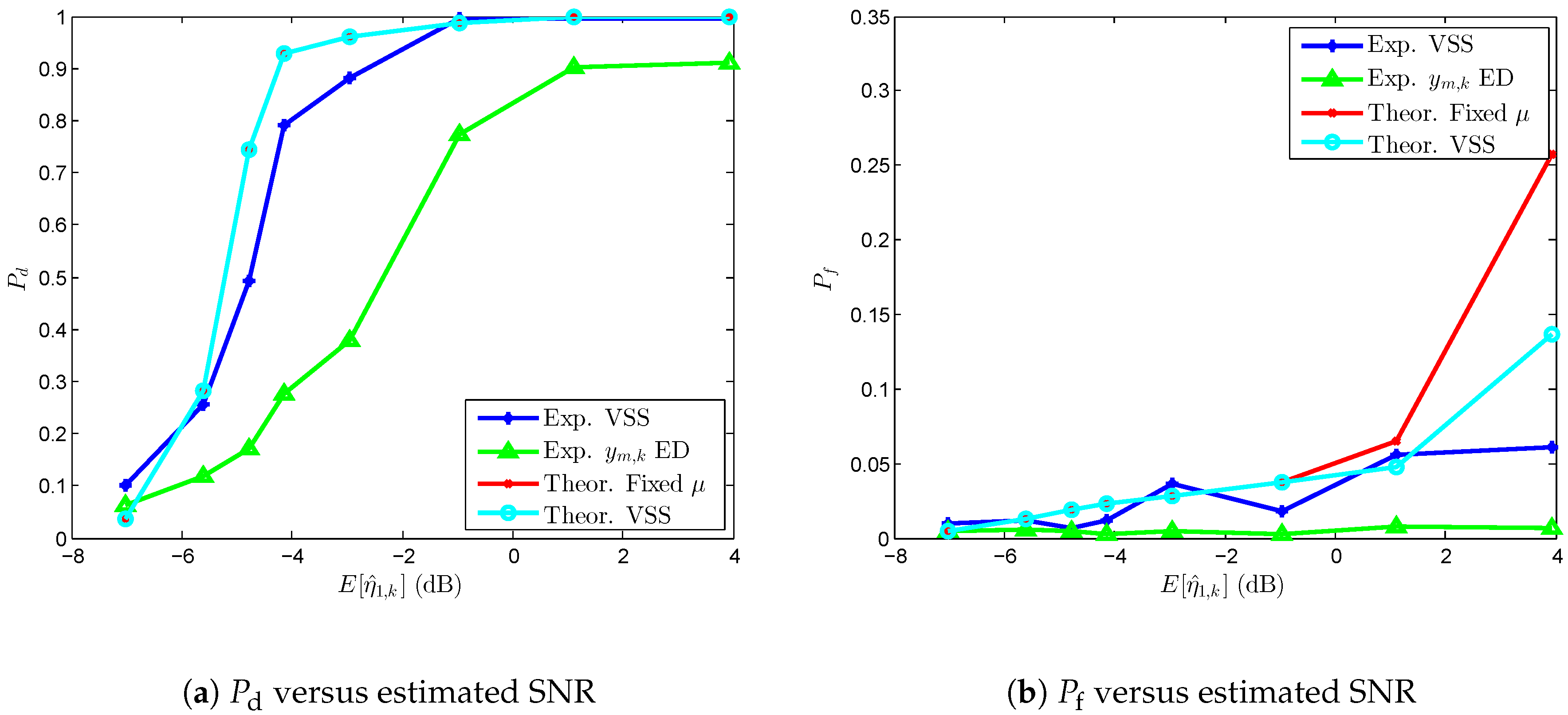
Figure 9 shows
and
performances for different averaged measured levels of SNR in single-node detection. The results are compared with theoretical performance values of the LMS-based ED, selecting the step-size to satisfy the convergence criterion in (
10), a theoretical VSSLMS-based ED, and the real performance of the conventional ED technique. The SNRs are averaged from the SNR estimates
computed as in (
9). On one hand, one can see in
Figure 9a that the values of
performance of the proposed algorithm outperform the conventional ED technique for the measured range of averaged SNR. It is worth noting that the experimental VSSLMS-based ED provides
for averaged SNR greater than
dB. If one pays attention to the probability of false alarm in
Figure 9b, one can observe the negative effect of the transient states in the
values as SNR increases compared with the conventional ED. On the other hand, when comparing the experimental results with theoretical values, we see a degradation on the
values due to the time-varying environment in real conditions and possible estimation errors. In the case of
performance, results are similar in the SNR interval
dB and theoretical values are higher than experimental ones. This is due to the fact that, in real conditions, SNR variations modify transient states being longer and shorter according to the PU receiving signal fluctuations. However, in theoretical results, transient length is almost constant for the Monte Carlo simulation according to the pre-defined SNR. In addition, we can also see how the VSSLMS-based ED reduces
compared with the LMS-based ED, while maintaining the same
performance.
In
Table 4, we analyze the performance of cooperative detection employing two SUs in cooperation mode with uniform weighting strategy (cf. [
24] for more details) and we compare the performance results with the optimal linear cooperative strategy presented in [
36]. The averaged SNR in SU 2 has been kept almost stable and the averaged SNR in SU 1 has been reduced using an attenuator at the input of the receiving antenna. The performance of the linear cooperative strategy has been computed using averaged SNR values of the SUs. One can observe that SU 2 with averaged SNR around
dB highly improves their performances compared with the single-node detection in
Figure 9, i.e.,
for SNR
. In contrast, SU 1 maintains similar
and
as single-node performances when averaged SNR
dB, whereas its
values are degraded compared with single-node detection for
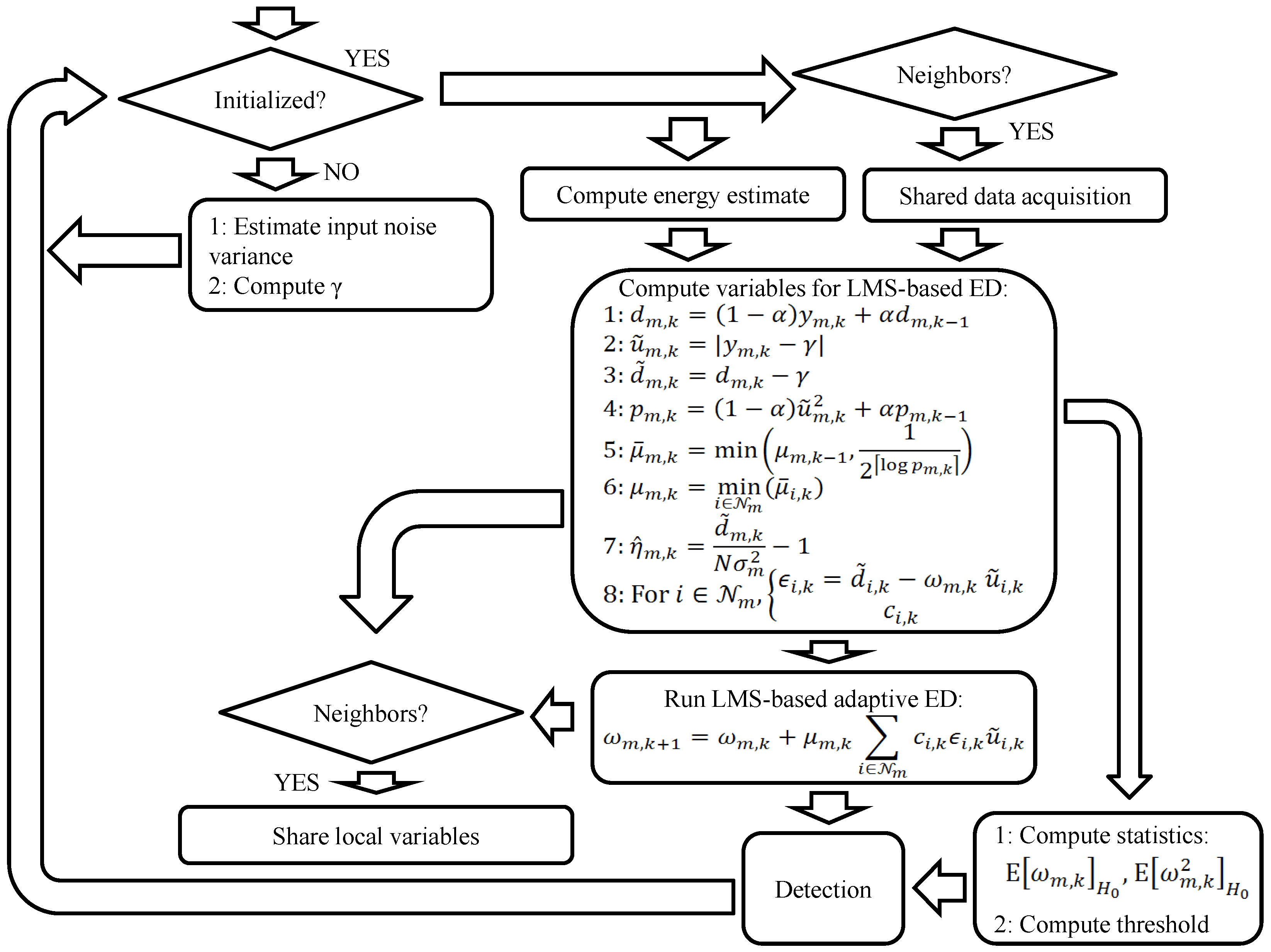
dB. From these results, we can conclude that cooperation among SUs is adequate when SNR levels are low, whereas SUs with high averaged SNR should share their local estimates with their neighbors with worse environment conditions but not to employ neighboring data in their local detection process proposed in
Figure 3. The decision of cooperating could be performed comparing their local SNR estimates in (
9) with a minimum SNR threshold before taking sharing data from other neighboring SUs. If we compare empirical and theoretical values, we can observe that experimental
results are quite similar to the theoretical values for the SU 1’s SNR range
dB. When the SU 1’s SNR is lower, theoretical
becomes smaller. If we pay attention to the probability of false alarm, we can clearly observe the effect of the transient state in the theoretical performance. In contrast, empirical
is almost stable for all measured averaged SNRs excepting the case of SU 1’s SNR
dB, whose
is abnormally high, i.e.,
. Finally, if we compare the VSSLMS-based ED performance with the optimal linear cooperative ED presented in [
36], we can observe that the proposed algorithm outperforms the linear ED strategy in terms of
. Nonetheless, the linear ED strategy presents a stable performance in terms of the desired
maintaining its value as 0.001 for all cases.


 ,
, 










{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}