
Direction of Arrival Estimation for MIMO Radar via Unitary Nuclear Norm Minimization

{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
Abstract
:1. Introduction
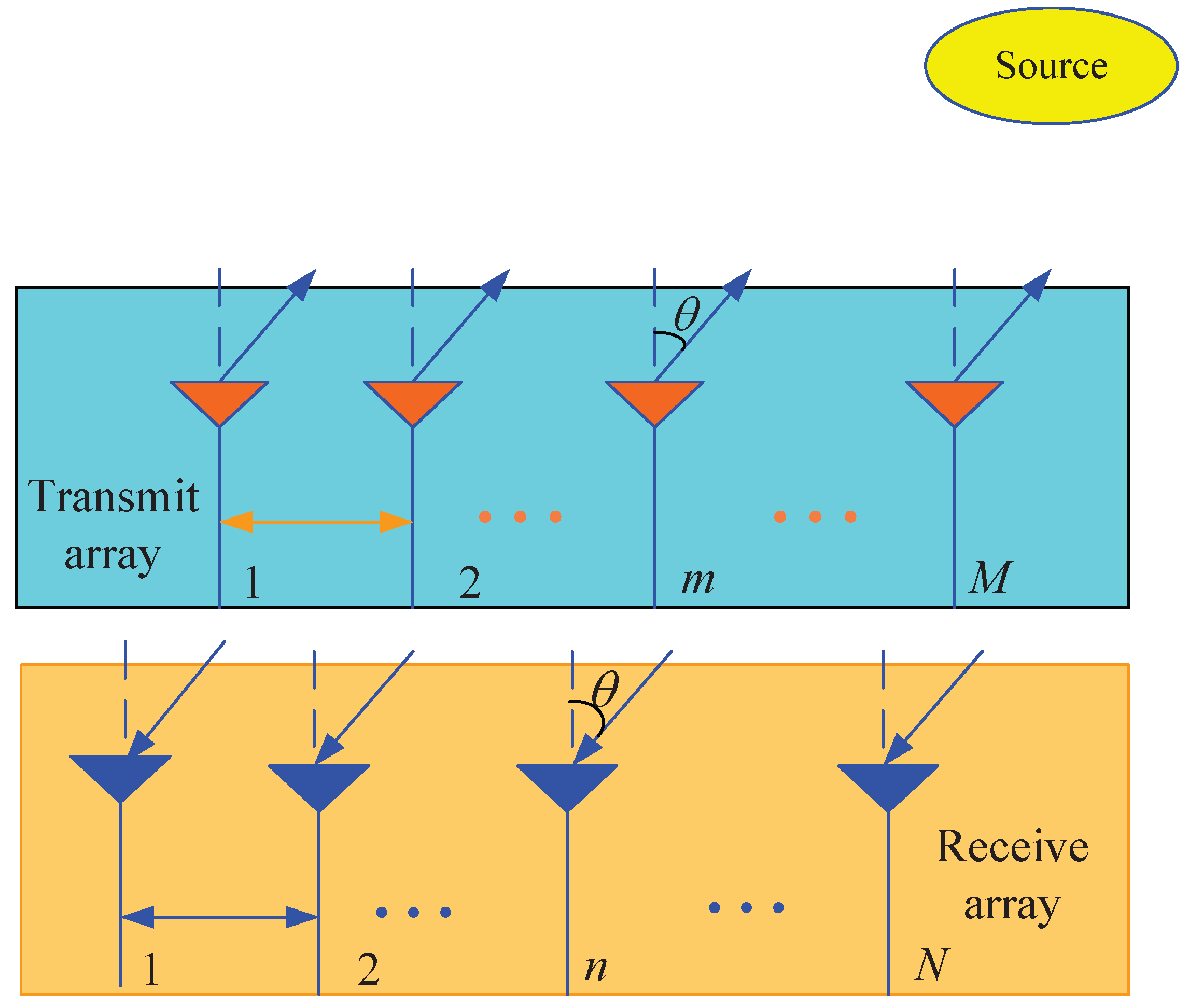
2. Data Model and Problem Formulation
3. Unitary Nuclear Norm Minimization Algorithm
3.1. Augmented Data Matrix and Unitary Transforation
3.2. Nuclear Norm Minimization Algorithm
4. Related Remarks
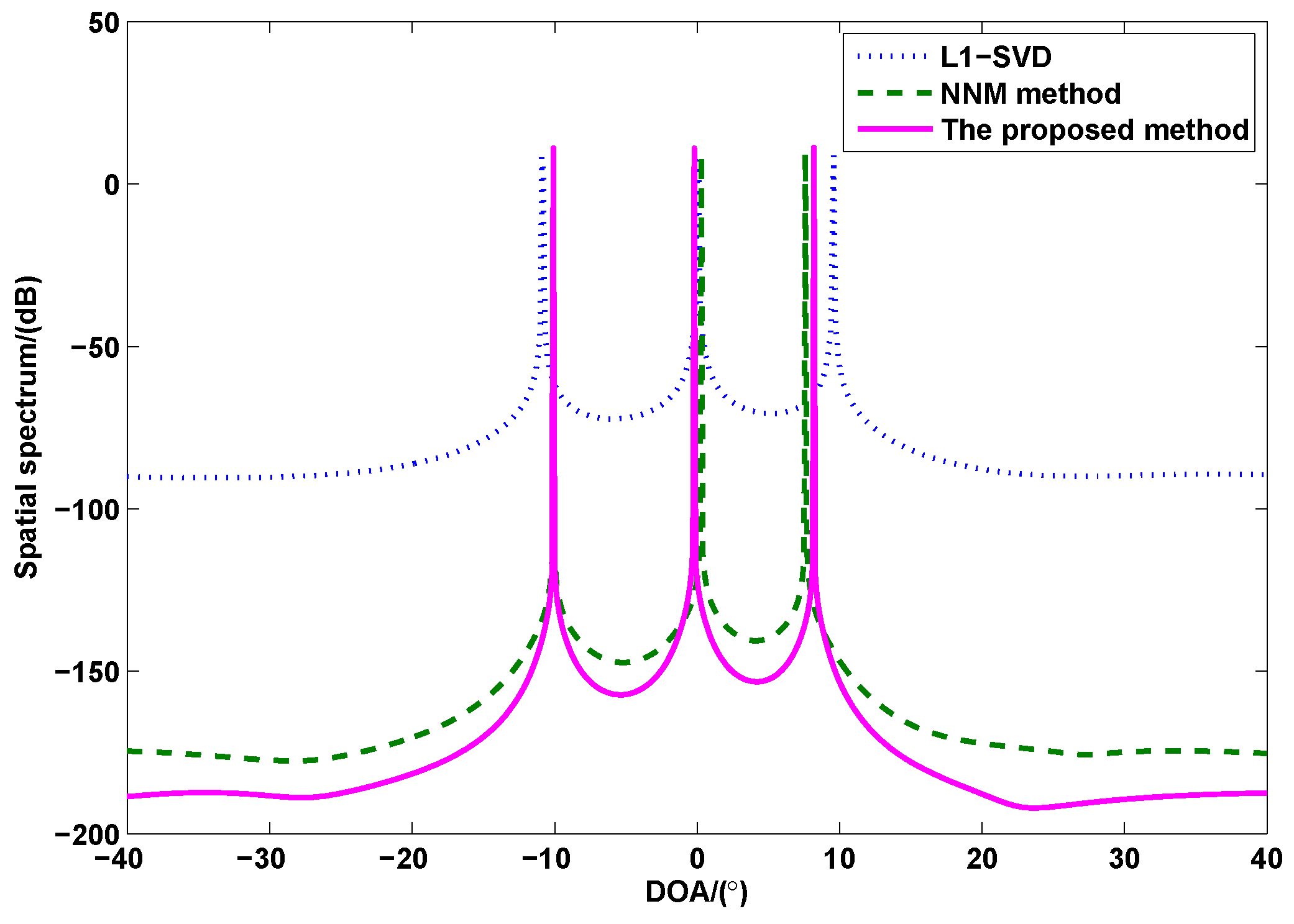
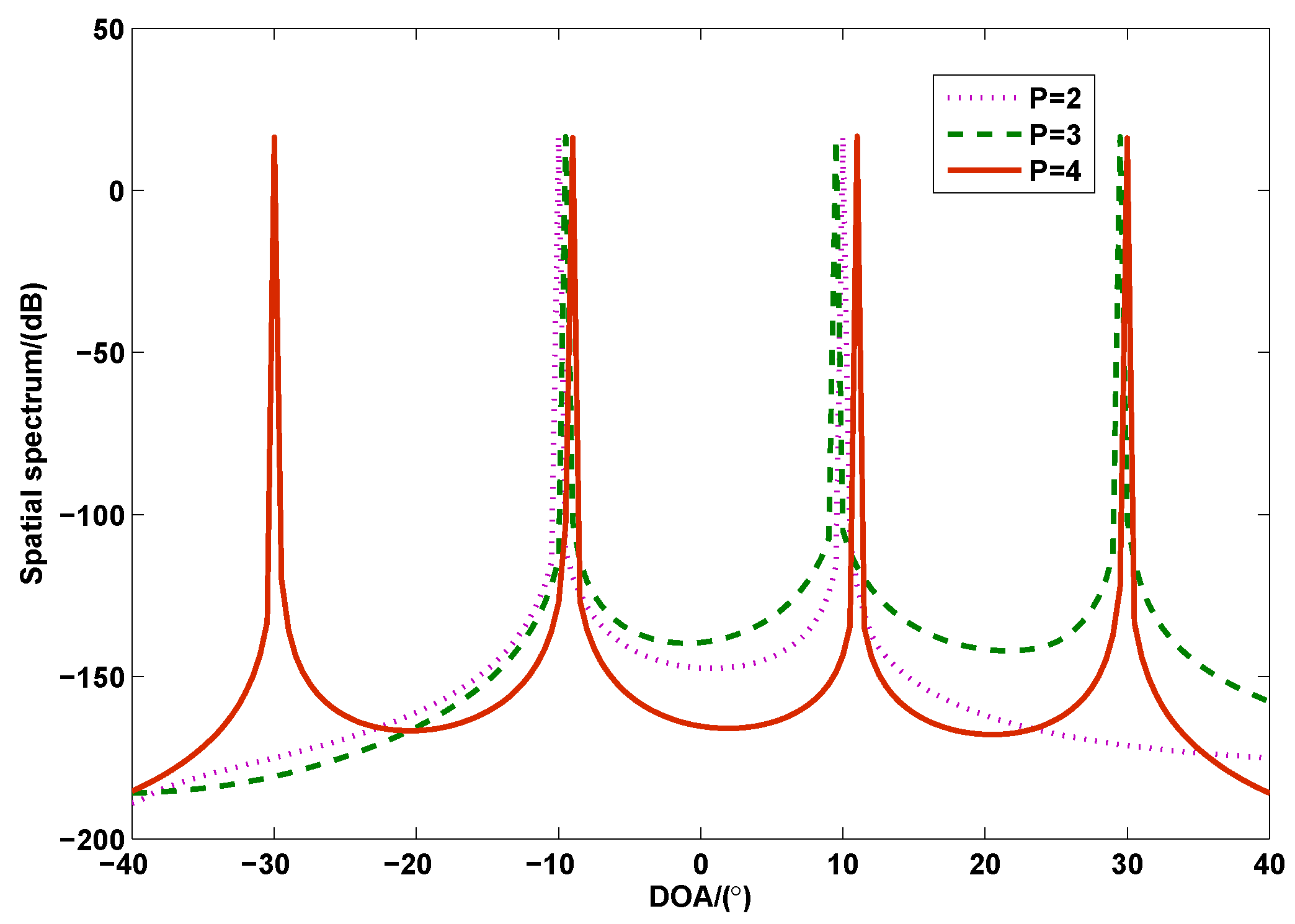
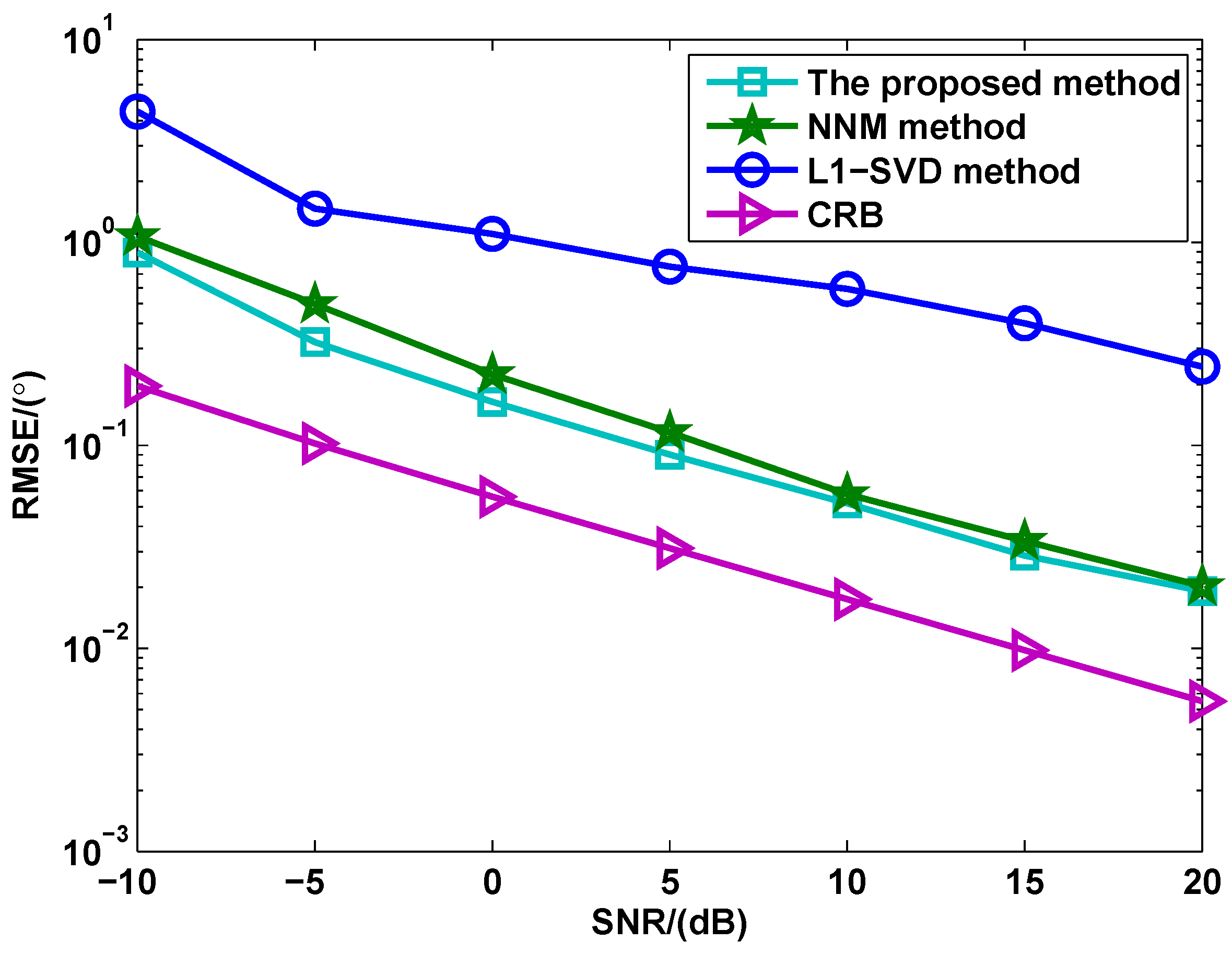
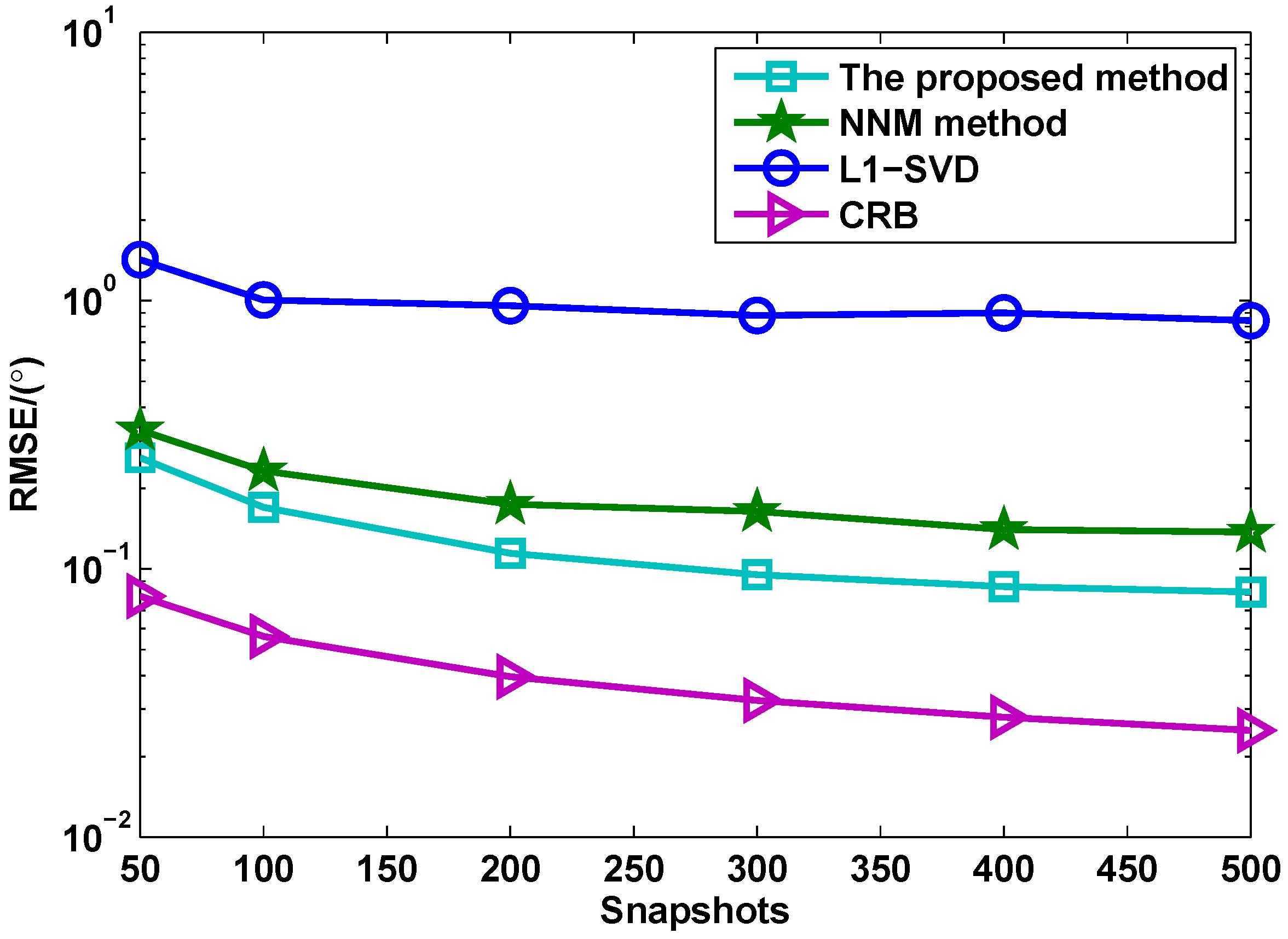
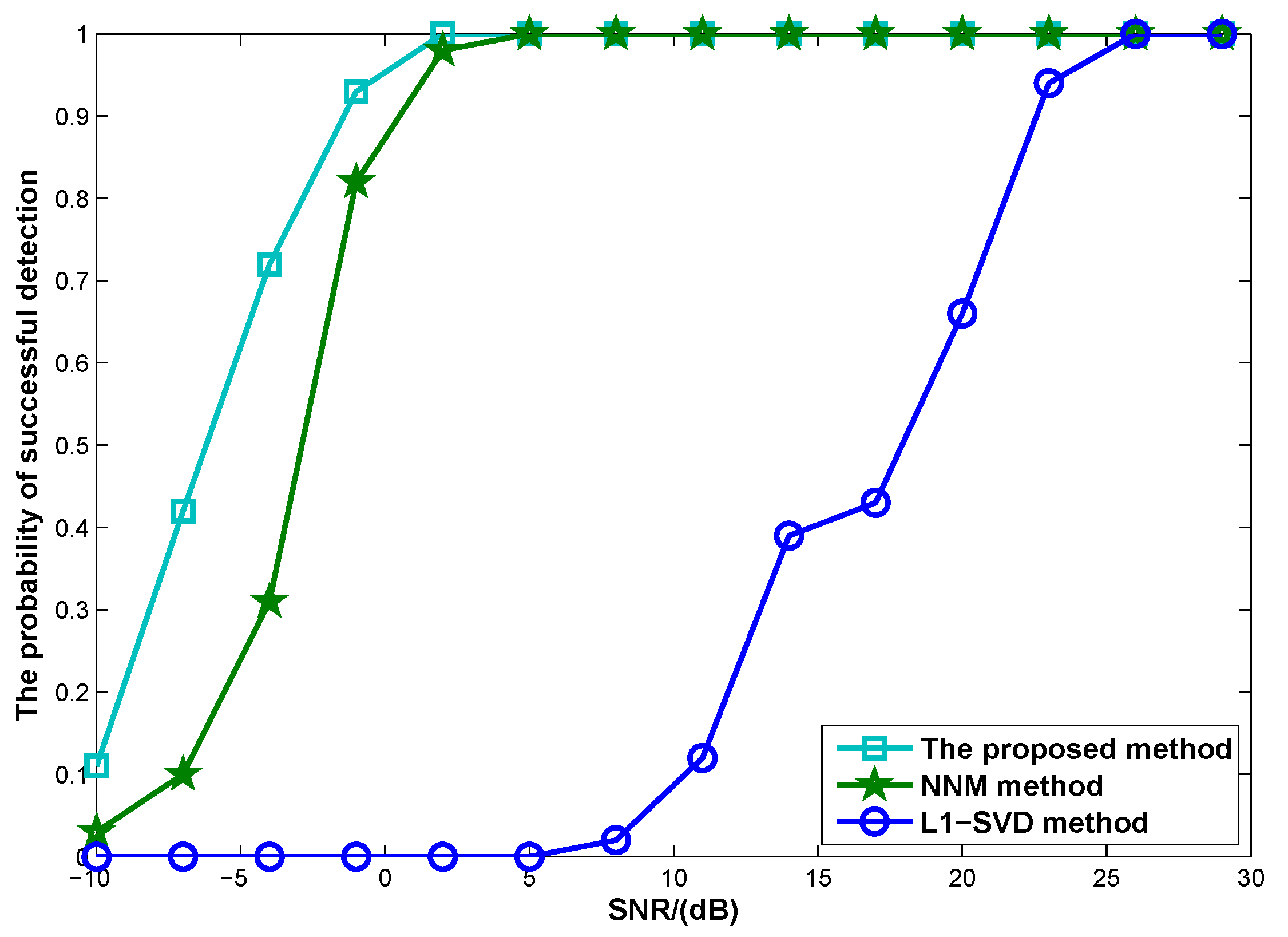
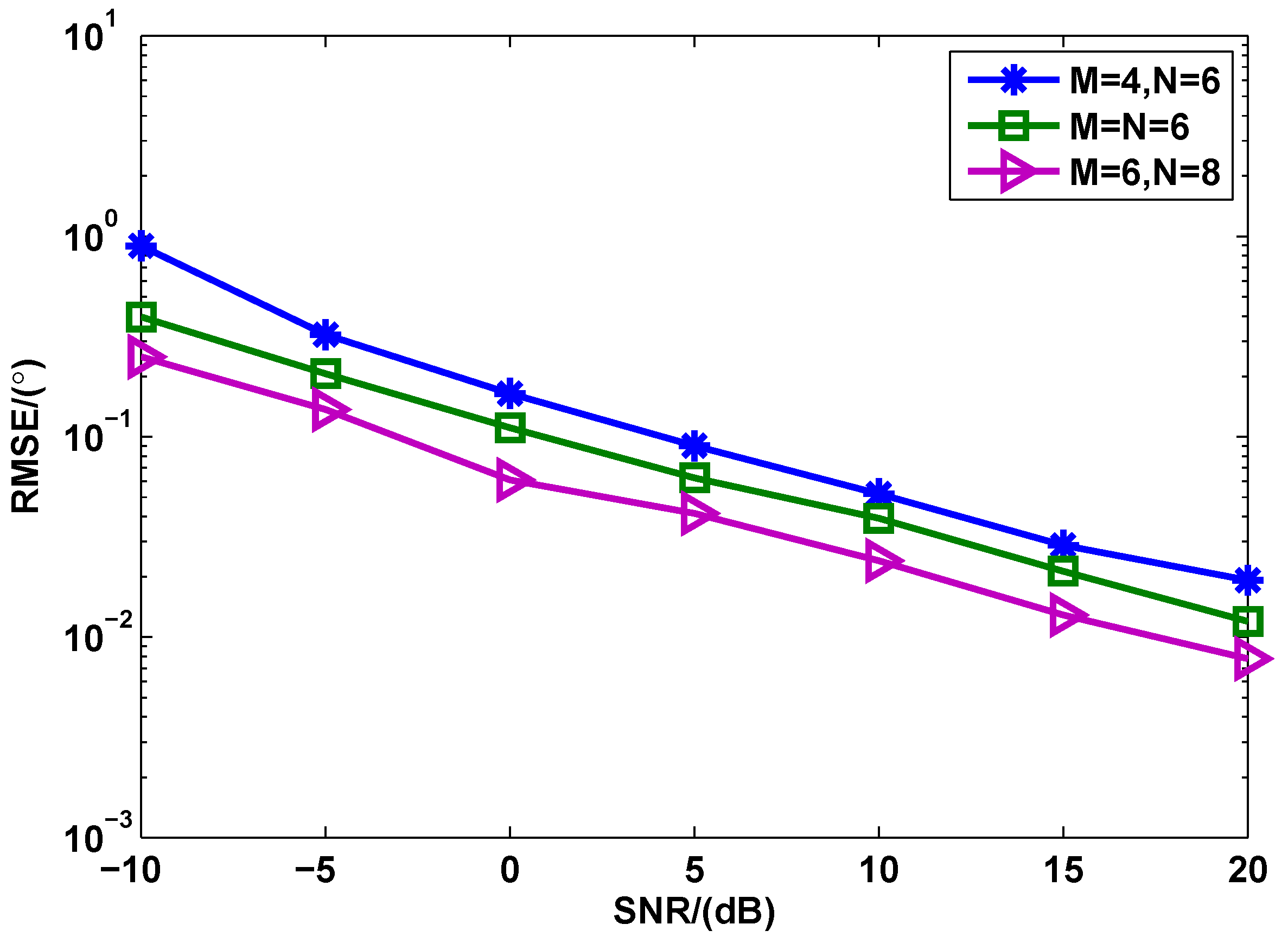
5. Simulation Results
6. Conclusions
Acknowledgments
Author Contributions
Conflicts of Interest
References
- Hassanien, A.; Vorobyov, S.A. Transmit energy focusing for DOA estimation in MIMO radar with colocated antennas. IEEE Trans. Signal Process. 2011, 59, 2669–2682. [Google Scholar] [CrossRef]
- Nion, D.; Sidiropoulos, N.D. Tensor algebra and multidimensional harmonic retrieval in signal processing for MIMO radar. IEEE Trans. Signal Process. 2010, 58, 5693–57052. [Google Scholar] [CrossRef]
- Li, J.; Zhang, X.; Cao, R.; Zhou, M. Reduced-dimension MUSIC for angle and array gain-phase error estimation in bistatic MIMO radar. IEEE Commun. Lett. 2013, 17, 443–446. [Google Scholar] [CrossRef]
- Chen, J.; Li, P.; Zhu, Y.; Li, J. Parameter Estimation Method for High-Speed Target Using Bistatic MIMO Radar with Dual-Frequency Transmitters. Wirel. Pers. Commun. 2015, 85, 2083–2096. [Google Scholar] [CrossRef]
- Haimovich, A.M.; Blum, R.; Cimini, L. MIMO radar with widely separated antennas. IEEE Signal Process. Mag. 2008, 25, 116–129. [Google Scholar] [CrossRef]
- Li, J.; Stoica, P. MIMO radar with colocated antennas. IEEE Signal Process. Mag. 2007, 24, 106–114. [Google Scholar] [CrossRef]
- Gao, X.; Zhang, X.; Feng, G.; Wang, Z.; Xu, D. On the MUSIC-derived aprroaches of angle estimation for bistatic MIMO radar. In Proceedings of the International Conference on Wireless Networks and Information Systems (WNIS ’09), Shanghai, China, 28–29 December 2009; pp. 343–346. [Google Scholar]
- Bencheikh, M.L.; Wang, Y.; He, H. Polynomial root finding technique for joint DOA DOD estimation in bistatic MIMO radar. Signal Process. 2013, 90, 2723–2730. [Google Scholar] [CrossRef]
- Chen, D.; Chen, B.; Qin, G. Angle estimation using ESPRIT in MIMO radar. Electron. Lett. 2008, 44, 770–771. [Google Scholar]
- Zhang, X.; Xu, D. Low-complexity ESPRIT-based DOA estimation for colocated MIMO radar using reduced-dimension transformation. Electron. Lett. 2011, 47, 283–284. [Google Scholar] [CrossRef]
- Malioutov, D.; Cetin, M.; Willsky, A.S. A sparse signal reconstruction perspective for source localization with sensor arrays. IEEE Trans. Signal Process. 2005, 53, 3010–3022. [Google Scholar] [CrossRef]
- Yin, J.; Chen, T. Direction-of-arrival estimation using a sparse representation of array covariance vectors. IEEE Trans. Signal Process. 2011, 59, 4489–4493. [Google Scholar] [CrossRef]
- Gu, Y.; Leshem, A. Robust adaptive beamforming based on interference covariance matrix reconstruction and steering vector estimation. IEEE Trans. Signal Process. 2012, 60, 3881–3885. [Google Scholar]
- Dai, J.; Xu, X.; Zhao, D. Direction-of-arrival estimation via real-valued sparse representation. IEEE Antennas Wirel. Propag. Lett. 2013, 12, 376–379. [Google Scholar] [CrossRef]
- Shi, Z.; Zhou, C.; Gu, Y.; Goodman, N.A.; Qu, F. Source Estimation using Coprime Array: A Sparse Reconstruction Perspective. IEEE Sens. J. 2017, 17, 755–765. [Google Scholar] [CrossRef]
- Wang, X.; Wang, W.; Liu, J.; Li, X.; Wang, J. A sparse representation scheme for angle estimation in monostatic MIMO radar. Signal Process. 2014, 104, 258–263. [Google Scholar] [CrossRef]
- Li, J.; Zhang, X. Sparse representation-based joint angle and Doppler frequency estimation for MIMO radar. Multidimens. Syst. Signal Process. 2015, 26, 179–192. [Google Scholar] [CrossRef]
- Liu, J.; Wang, X.; Zhou, W. Covariance vector sparsity-aware DOA estimation for monostatic MIMO radar with unknown mutual coupling. Signal Process. 2016, 119, 12–17. [Google Scholar] [CrossRef]
- Wang, X.; Wang, W.; Li, X.; Liu, J. Real-valued covariance vector sparsity-inducing DOA estimation for monostatic MIMO radar. Sensors 2015, 15, 28271–28286. [Google Scholar] [CrossRef] [PubMed]
- Charge, P.; Wang, Y.; Saillard, J. A non-circular sources direction finding method using polynomial rooting. Signal Process. 2001, 82, 1765–1770. [Google Scholar] [CrossRef]
- Abeida, H.; Delmas, J.P. MUSIC-like estimation of direction of arrival for noncircular sources. IEEE Trans. Signal Process. 2006, 54, 2678–2690. [Google Scholar] [CrossRef]
- Haardt, M.; Romer, F. Enhancements of unitary ESPRIT for non-circular sources. In Proceedings of the International Conference Acoustics Speech Signal Processing (ICASSP), Quebec, QC, Canada, 17–21 May 2004; pp. 101–104. [Google Scholar]
- Wang, W.; Wang, X.; Song, H.; Ma, Y. Conjugate ESPRIT for DOA estimation in monostatic MIMO radar. Signal Process. 2013, 93, 2070–2075. [Google Scholar] [CrossRef]
- Yang, M.L.; Chen, B.X.; Yang, X.Y. Conjugate ESPRIT algorithm for bistatic MIMO radar. Electron. Lett. 2010, 46, 1692–1694. [Google Scholar] [CrossRef]
- Bencheikh, M.L.; Wang, Y. Non circular ESPRIT-RootMUSIC joint DOA-DOD estimation in bistatic MIMO radar. In Proceedings of the 2011 7th International Workshop on Systems, Signal Processing and Their Applications (WOSSPA), Tipaza, Algeria, 9–11 May 2011; pp. 51–54. [Google Scholar]
- Wang, X.; Wang, W.; Li, X.; Liu, Q.; Liu, J. Sparsity-aware DOA estimation scheme for noncircular source in MIMO radar. Sensors 2016, 16, 539. [Google Scholar] [CrossRef] [PubMed]
- Wang, X.; Wang, L.; Li, X.; Bi, G. Nuclear norm minimization framework for DOA estimation in MIMO radar. Signal Process. 2017, 135, 147–152. [Google Scholar] [CrossRef]
- Zoltowski, M.D.; Haardt, M.; Mathews, C.P. Closed-form 2-D angle estimation with rectangular arrays in element space or beamspace via unitary ESPRIT. IEEE Trans. Signal Process. 1996, 44, 316–328. [Google Scholar] [CrossRef]
- Grant, M.; Boyd, S. CVX: MATLAB Software for Disciplined Convex Programming, 2016. Available online: http://cvxr.com/cvx (accessed on 12 April 2016).
- Cands, E.J.; Wakin, M.B.; Boyd, S.P. Enhancing sparsity by reweighted L1 minimization. J. Fourier Anal. Appl. 2008, 14, 877–905. [Google Scholar] [CrossRef]
- Yang, Z.; Xie, L.; Zhang, C. A discretization-free sparse and parametric approach for linear array signal processing. IEEE Trans. Signal Process. 2014, 62, 4959–4973. [Google Scholar] [CrossRef]







© 2017 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Wang, X.; Huang, M.; Wu, X.; Bi, G. Direction of Arrival Estimation for MIMO Radar via Unitary Nuclear Norm Minimization. Sensors 2017, 17, 939. https://doi.org/10.3390/s17040939
Wang X, Huang M, Wu X, Bi G. Direction of Arrival Estimation for MIMO Radar via Unitary Nuclear Norm Minimization. Sensors. 2017; 17(4):939. https://doi.org/10.3390/s17040939
Chicago/Turabian StyleWang, Xianpeng, Mengxing Huang, Xiaoqin Wu, and Guoan Bi. 2017. "Direction of Arrival Estimation for MIMO Radar via Unitary Nuclear Norm Minimization" Sensors 17, no. 4: 939. https://doi.org/10.3390/s17040939
APA StyleWang, X., Huang, M., Wu, X., & Bi, G. (2017). Direction of Arrival Estimation for MIMO Radar via Unitary Nuclear Norm Minimization. Sensors, 17(4), 939. https://doi.org/10.3390/s17040939