
A Survey on an Energy-Efficient and Energy-Balanced Routing Protocol for Wireless Sensor Networks

Abstract
:1. Introduction
2. Related Work
3. Terminologies Used in WSNs
3.1. Network Lifetime
3.2. SN Residual Energy
3.3. Average Network Energy
3.4. Distance Metric
3.5. Hop Count
3.6. Homogeneous and Heterogeneous WSNs
4. Overview of Energy Consumption in WSNs
4.1. WSN Energy Dissipation Model
4.2. SNs Energy Dissipation Issues
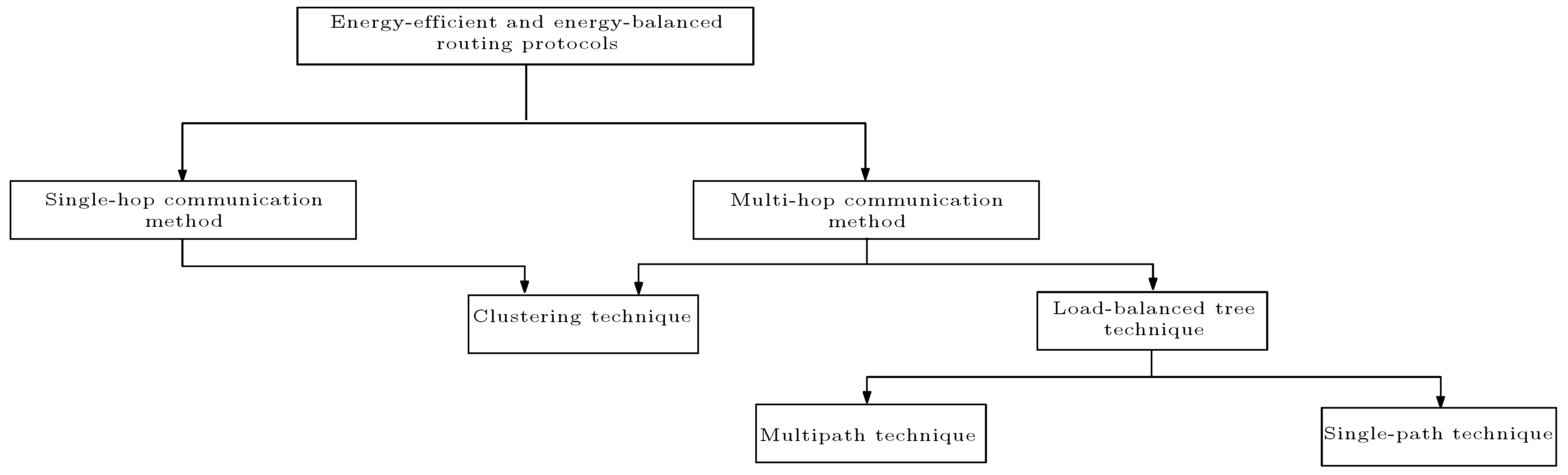
5. Taxonomy for Energy-Efficient and Energy-Balanced Routing Protocols
5.1. Multi-Hop Communication Method
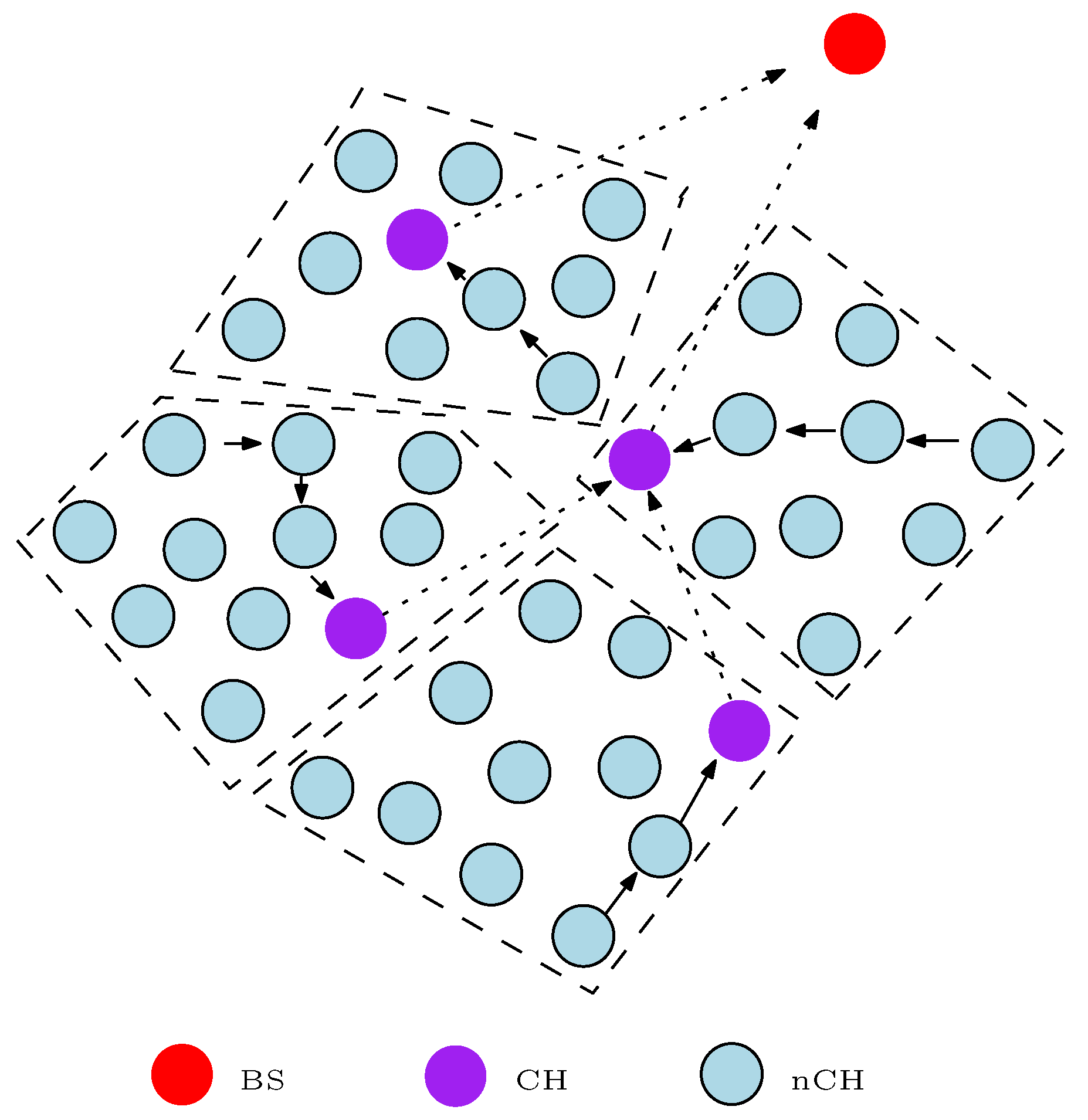
5.1.1. Multi-Hop Clustering Technique
5.1.2. Load-Balanced Tree Technique
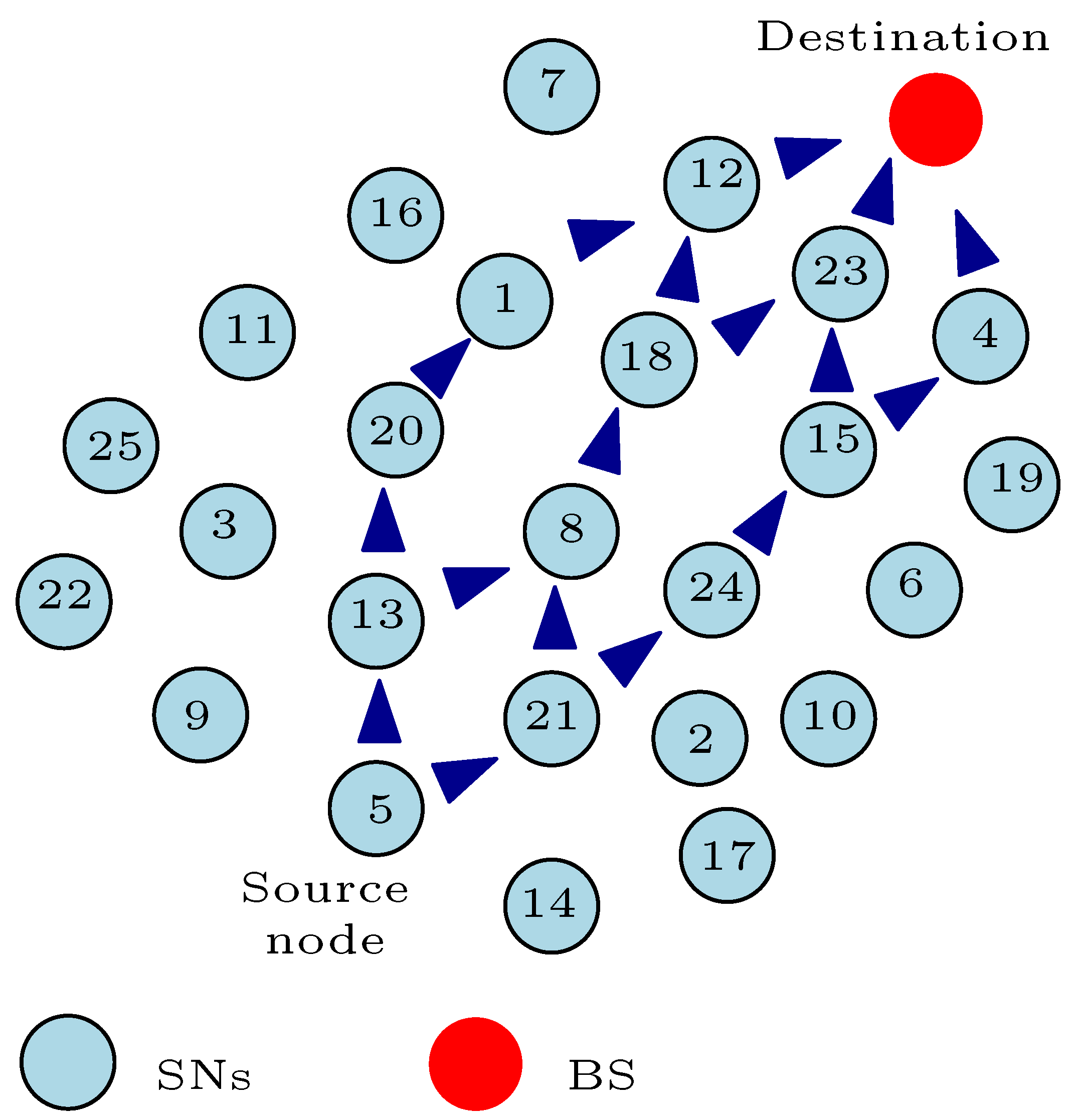
Multipath Technique
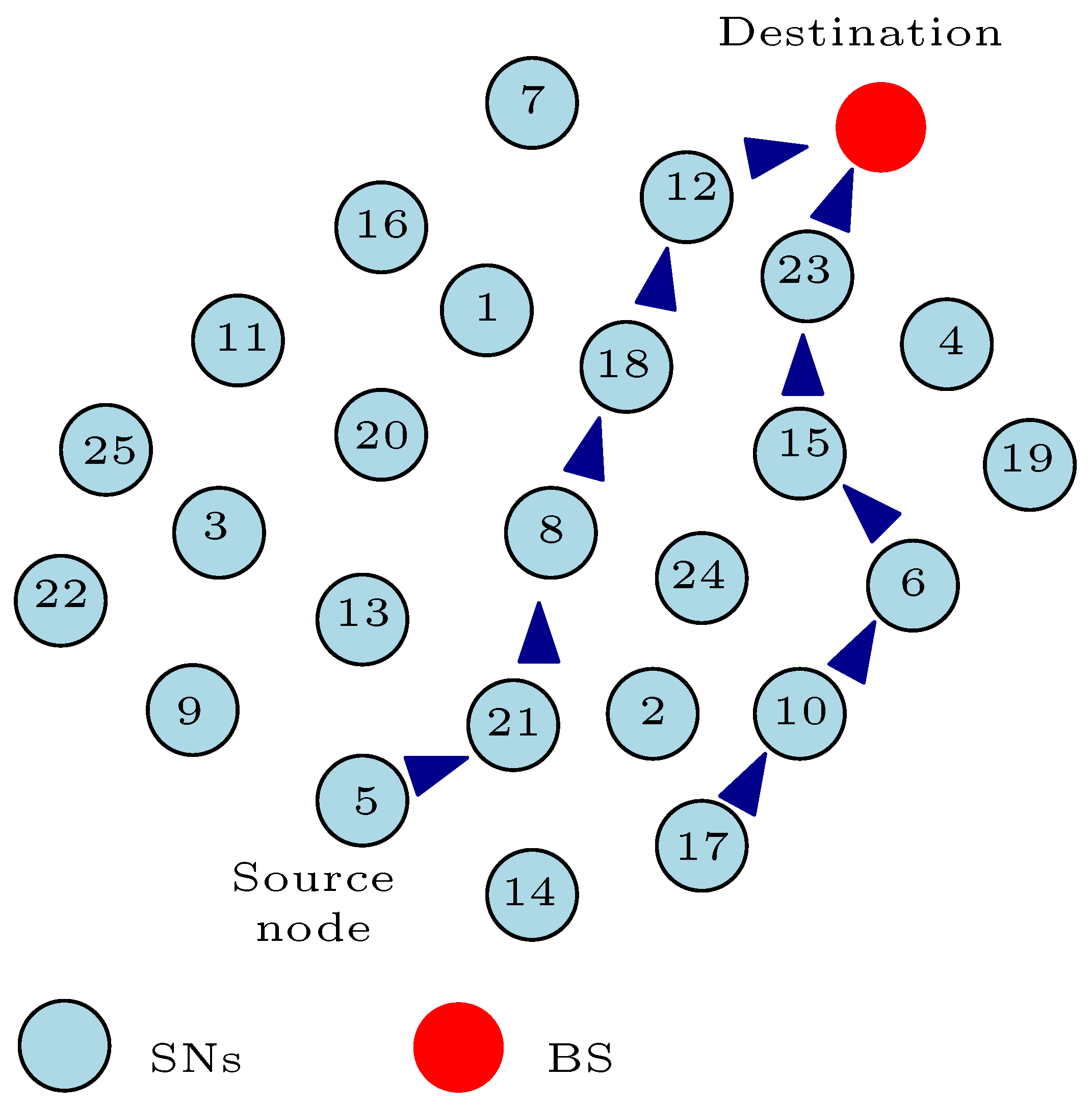
Single-Path Technique
5.2. Single-Hop Communication Method
6. Survey Findings and Possible Research Directions
7. Conclusions
Acknowledgments
Conflicts of Interest
References
- Yi, W.Y.; Lo, K.M.; Mak, T.; Leung, K.S.; Leung, Y.; Meng, M.L. A Survey of Wireless Sensor Network Based Air Pollution Monitoring Systems. Sensors 2015, 15, 31392–31427. [Google Scholar] [CrossRef] [PubMed]
- Chen, D.; Liu, Z.; Wang, L.; Dou, M. Natural Disaster Monitoring with Wireless Sensor Networks: A Case Study of Data-Intensive Applications upon Low-Cost Scalable Systems. Mobile Netw. Appl. 2013, 18, 651–663. [Google Scholar] [CrossRef]
- Bouabdellah, K.; Noureddine, H.; Larbi, S. Using Wireless Sensor Networks for Reliable Forest Fires Detection. Proced. Comput. Sci. 2013, 19, 794–801. [Google Scholar] [CrossRef]
- Pantazis, N.A.; Nikolidakis, S.A.; Vergados, D.D. Energy-Efficient Routing Protocols in Wireless Sensor Networks: A Survey. IEEE Commun. Surv. Tutor. 2013, 15, 551–591. [Google Scholar] [CrossRef]
- Đurišić, M.P.; Tafa, Z.; Dimić, G.; Milutinović, V. A survey of military applications of wireless sensor networks. In Proceedings of the 2012 Mediterranean Conference on Embedded Computing (MECO), Bar, Montenegro, 19–21 June 2012; pp. 196–199. [Google Scholar]
- Ghataoura, D.S.; Mitchell, J.E. Networking and Application Interface Technology for Wireless Sensor Network Surveillance and Monitoring. IEEE Commun. Mag. 2011, 49, 90–97. [Google Scholar] [CrossRef]
- Alemdar, H.; Ersoy, C. Wireless sensor networks for healthcare: A survey. Comput. Netw. 2010, 54, 2688–2710. [Google Scholar] [CrossRef]
- Ko, J.; Lu, C.; Srivastava, M.B.; Stankovic, J.A.; Terzis, A. Wireless sensor networks for healthcare. Proc. IEEE 2010, 98, 1947–1960. [Google Scholar] [CrossRef]
- Neves, P.; Stachyra, M.; Rodrigues, J. Application of wireless sensor networks to healthcare promotion. J. Commun. Softw. Syst. 2008, 4, 181–190. [Google Scholar] [CrossRef]
- Rawat, P.; Singh, K.D.; Chaouchi, H.; Bonnin, J.M. Wireless sensor networks: A survey on recent developments and potential synergies. J. Supercomput. 2014, 68, 1–47. [Google Scholar] [CrossRef]
- Al-Karaki, J.N.; Kamal, A.E. Routing techniques in wireless sensor networks: A survey. IEEE Wirel. Commun. 2004, 11, 6–28. [Google Scholar] [CrossRef]
- Younis, O.; Krunz, M.; Ramasubramanian, S. Node Clustering in Wireless Sensor Networks: Recent Developments and Deployment Challenges. IEEE Netw. 2006, 20, 20–25. [Google Scholar] [CrossRef]
- Abbasi, A.A.; Younis, M. A survey on clustering algorithms for wireless sensor networks. Comput. Commun. 2007, 30, 2826–2841. [Google Scholar] [CrossRef]
- Sheikhpour, R.; Jabbehdari, S.; Khadem-Zadeh, A. Comparison of Energy Efficient Clustering Protocols in Heterogeneous Wireless Sensor Networks. Int. J. Adv. Sci. Technol. 2011, 36, 27–40. [Google Scholar]
- Liu, X. A Survey on Clustering Routing Protocols in Wireless Sensor Networks. Sensors 2012, 12, 11113–11153. [Google Scholar] [CrossRef] [PubMed]
- Radi, M.; Dezfouli, B.; Abu Bakar, K.; Lee, M. Multipath Routing in Wireless Sensor Networks: Survey and Research Challenges. Sensors 2012, 12, 650–685. [Google Scholar] [CrossRef] [PubMed]
- Sha, K.; Gehlot, J.; Greve, R. Multipath Routing Techniques in Wireless Sensor Networks: A Survey. Wirel. Pers. Commun. 2012, 70, 807–829. [Google Scholar] [CrossRef]
- Masdari, M.; Tanabi, M. Multipath Routing protocols in Wireless Sensor Networks: A Survey and Analysis. Int. J. Future Gener. Commun. Netw. 2013, 6, 181–192. [Google Scholar] [CrossRef]
- Anasane, A.A.; Satao, R.A. A Survey on various Multipath Routing protocols in Wireless Sensor Networks. Procedia Comput. Sci. 2016, 79, 610–615. [Google Scholar] [CrossRef]
- Zhang, Y.; He, S.; Chen, J.; Sun, Y.; Shen, X. Distributed sampling rate control for rechargeable sensor nodes with limited battery capacity. IEEE Trans. Wirel. Commun. 2013, 12, 3096–3106. [Google Scholar] [CrossRef]
- He, S.; Chen, J.; Jiang, F.; Yau, D.K.Y.; Xing, G.; Sun, Y. Energy provisioning in wireless rechargeable sensor networks. IEEE Trans. Mobile Comput. 2013, 12, 1931–1942. [Google Scholar] [CrossRef]
- Cheng, P.; He, S.; Jiang, F.; Gu, Y.; Chen, J. Optimal scheduling for quality of monitoring in wireless rechargeable sensor networks. IEEE Trans. Wirel. Commun. 2013, 12, 3072–3084. [Google Scholar] [CrossRef]
- He, L.; Fu, L.; Zheng, L.; Cheng, P.; Gu, Y.; Pan, J.; Chen, J. ESync: An energy synchronized charging protocol for rechargeable wireless sensor networks. ACM Int. Symp. Mobile Ad Hoc Netw. Comput. 2014, 15, 247–256. [Google Scholar]
- Fu, L.; Cheng, P.; Gu, Y.; Chen, J.; He, T. Optimal charging in wireless rechargeable sensor networks. IEEE Trans. Veh. Technol. 2016, 65, 278–291. [Google Scholar] [CrossRef]
- Lin, C.; Wang, Z.; Han, D.; Wu, Y.; Yu, C.W.; Wu, G. TADP: Enabling temporal and distantial priority scheduling for on-demand charging architecture in wireless rechargeable sensor Networks. J. Syst. Archit. 2016, 70, 26–38. [Google Scholar] [CrossRef]
- Zhang, Y.; He, S.; Chen, J. Data gathering optimization by dynamic sensing and routing in rechargeable sensor networks. IEEE/ACM Trans. Netw. 2016, 24, 1632–1646. [Google Scholar] [CrossRef]
- Lin, C.; Wu, G.; Obaidat, M.S.; Yu, C.W. Clustering and splitting charging algorithms for large scaled wireless rechargeable sensor networks. J. Syst. Softw. 2016, 113, 381–394. [Google Scholar] [CrossRef]
- Lin, C.; Wu, Y.; Liu, Z.; Obaidat, M.S.; Yu, C.W.; Wu, G. GTCharge: A game theoretical collaborative charging scheme for wireless rechargeable sensor networks. J. Syst. Softw. 2016, 121, 88–104. [Google Scholar] [CrossRef]
- Lin, C.; Han, D.; Deng, J.; Wu, G. P2S: A Primary and Passer-by Scheduling Algorithm for On-Demand Charging Architecture in Wireless Rechargeable Sensor Networks. IEEE Trans. Veh. Technol. 2017. [Google Scholar] [CrossRef]
- Akyildiz, I.F.; Su, W.; Sankarasubramaniam, Y.; Cayirci, E. Wireless sensor networks: A survey. Comput. Netw. 2002, 38, 399–422. [Google Scholar] [CrossRef]
- Akyildiz, I.F.; Su, W.; Sankarasubramaniam, Y.; Cayirci, E. A Survey on Sensor Networks. IEEE Commun. Mag. 2002, 40, 102–114. [Google Scholar] [CrossRef]
- Akkaya, K.; Younis, M. A survey on routing protocols for wireless sensor networks. Ad Hoc Netw. 2005, 3, 325–349. [Google Scholar] [CrossRef]
- Yick, J.; Mukherjee, B.; Ghosal, D. Wireless Sensor Network Survey. Comput. Netw. 2008, 52, 2292–2330. [Google Scholar] [CrossRef]
- Anastasi, G.; Conti, M.; Francesco, M.; Passarella, A. Energy Conservation in Wireless Sensor Networks: A survey. Ad Hoc Netw. 2009, 7, 537–568. [Google Scholar] [CrossRef]
- Ehsan, S.B.; Hamdaoui, B. A Survey on Energy-Efficient Routing Techniques with QoS Assurances for Wireless Multimedia Sensor Networks. IEEE Commun. Surv. Tutor. 2011, 14, 265–278. [Google Scholar] [CrossRef]
- Saleem, M.; Gianni, A.; Caro, D.; Farooq, M. Swarm intelligence based routing protocol for wireless sensor networks: Survey and future directions. Inf. Sci. 2011, 181, 4597–4624. [Google Scholar] [CrossRef]
- Mundada, M.R.; Kiran, S.; Khobanna, S.; Varsha, R.N.; George, S.A. A Study on Energy Efficient Routing Protocols in Wireless Sensor Networks. Int. J. Distrib. Parallel. Syst. 2012, 3, 311–330. [Google Scholar] [CrossRef]
- Singh, S.K.; Singh, M.P.; Singh, D.K. A Survey of Energy-Efficient Hierarchical Cluster-Based Routing in Wireless Sensor Networks. Int. J. Adv. Netw. Appl. 2010, 2, 570–580. [Google Scholar]
- Naeimi, S.; Ghafghazi, H.; Chow, C.; Ishii, H. A Survey on the Taxonomy of Cluster-Based Routing Protocols for Homogeneous Wireless Sensor Networks. Sensors 2012, 12, 7350–7409. [Google Scholar] [CrossRef] [PubMed]
- Dietrich, I.; Dressler, F. On the Lifetime of Wireless Sensor Networks. ACM Trans. Sens. Netw. 2009, 5, 1–39. [Google Scholar] [CrossRef]
- Kuila, P.; Jana, P. Energy efficient clustering and routing algorithms for wireless sensor networks: Particle swarm optimization approach. Eng. Appl. Artif. Intell. 2014, 33, 127–140. [Google Scholar] [CrossRef]
- Madan, R.; Cui, S.; Lall, S.; Goldsmith, N.A. Cross-Layer Design for Lifetime Maximization in Interference-Limited Wireless Sensor Networks. IEEE Trans. Wirel. Commun. 2006, 5, 3142–3152. [Google Scholar] [CrossRef]
- Tripathy, A.K.; Chinara, S. Comparison of Residual Energy-Based Clustering Algorithms for Wireless Sensor Network. ISRN Sens. Netw. 2012, 2012, 1–10. [Google Scholar] [CrossRef]
- Kim, J.; Lin, X.; Shroff, N.; Sinha, P. Minimizing delay and maximizing lifetime for wireless sensor networks with anycast. IEEE/ACM Trans. Netw. 2010, 18, 515–528. [Google Scholar]
- Capone, A.; Cesana, M.; De Donno, D.; Filippini, I. Deploying multiple interconnected gateways in heterogeneous wireless sensor networks: An optimization approach. Comput. Commun. 2010, 33, 1151–1161. [Google Scholar] [CrossRef]
- Wang, Y.; Wang, X.; Xie, B.; Wang, D.; Agrawal, D.P. Intrusion Detection in Homogeneous and Heterogeneous Wireless Sensor Networks. IEEE Trans. Mobile Comput. 2008, 7, 698–711. [Google Scholar] [CrossRef]
- Tyagi, S.; Kumar, N. A systematic review of clustering and routing techniques based upon the LEACH protocol for wireless sensor networks. J. Netw. Comput. Appl. 2013, 36, 623–645. [Google Scholar] [CrossRef]
- Rappaport, T. Wireless Communications: Principles & Practice; Prentice-Hall: Englewood Cliffs, NJ, USA, 1996. [Google Scholar]
- Clare, L.; Pottie, G.; Agre, J. Self-organizing distributed sensor networks. Unattended Ground Sens. Technol. Appl. 1999, 3713, 229–237. [Google Scholar]
- Heinzelman, B.W.; Chandrakasan, A.P.; Balakrishnan, H. An Application-Specific Protocol Architecture for Wireless Microsensor Networks. IEEE Trans. Wirel. Commun. 2002, 1, 660–669. [Google Scholar] [CrossRef]
- Younis, M.; Akkaya, K. Strategies and techniques for node placement in wireless sensor networks: A survey. Ad Hoc Netw. 2008, 6, 621–655. [Google Scholar] [CrossRef]
- Verma, A.; Ranga, V.; Angra, S. Relay Node Placement Techniques in Wireless Sensor Networks. In Proceedings of the 2015 International Conference on Green Computing and Internet of Things (ICGCIoT), Delhi, India, 8–10 October 2015. [Google Scholar]
- Wu, X.B.; Chen, G.H. The energy hole problem of nonuniform node distribution in wireless sensor networks. Chin. J. Comput. 2008, 31, 1–9. [Google Scholar]
- Iqbal, M.; Naeem, M.; Anpalagan, A.; Ahmed, A.; Azam, M. Wireless Sensor Network Optimization: Multi-Objective Paradigm. Sensors 2015, 15, 17572–17620. [Google Scholar] [CrossRef] [PubMed]
- Younis, M.; Youssef, M.; Arisha, K. Energy-aware management for cluster-based sensor networks. Comput. Netw. 2003, 43, 649–668. [Google Scholar] [CrossRef]
- Younis, O.; Fahmy, S. HEED: A Hybrid, Energy-Efficient, Distributed Clustering Approach for Ad Hoc Sensor Networks. IEEE Trans. Mobile Comput. 2004, 3, 366–379. [Google Scholar] [CrossRef]
- Iqbal, M.; Gondal, I.; Dooley, L. An energy-time based load balancing technique for wireless sensor networks. In Proceedings of the Intelligent Sensors, Sensor Networks and Information Processing Conference, Melbourne, Australia, 5–8 December 2005. [Google Scholar]
- Qin, M.; Zimmermann, R. An energy-efficient voting-based clustering algorithm for sensor networks. In Proceedings of the Sixth International Conference on Software Engineering, Artificial Intelligence, Networking and Parallel/Distributed Computing and First ACIS International Workshop on Self-Assembling Wireless Networks, Towson, MD, USA, 23–25 May 2005. [Google Scholar]
- Lee, S.; Lee, J.; Sin, H.; Yoo, S.; Lee, S.; Lee, J.; Lee, Y.; Kim, S. An Energy-Efficient Distributed Unequal Clustering Protocol for Wireless Sensor Networks. Int. J. Electr. Comput. Energ. Electron. Commun. Eng. 2008, 2, 2715–2719. [Google Scholar]
- Wei, D.; Chan, H.A. Equalizing Cluster Lifetime for Sensor Networks with Directional Data Traffic to Improve Energy Efficiency. IEEE Consum. Commun. Netw. Conf. 2008, 5, 714–718. [Google Scholar]
- Gong, B.; Li, L.; Wang, S.; Zhou, X. Multihop Routing Protocol with Unequal Clustering for Wireless Sensor Networks. ISECS Int. Colloq. Comput. Commun. Control Manag. 2008, 2, 552–556. [Google Scholar]
- Wang, Y.; Yang, T.L.X.; Zhang, D. An Energy Efficient and Balance Hierarchical Unequal Clustering Algorithm for Large Scale Wireless Sensor Networks. Inf. Technol. J. 2009, 8, 28–38. [Google Scholar] [CrossRef]
- Yu, J.; Qi, Y.; Wang, G.; Guo, Q.; Gu, X. An Energy-Aware Distributed Unequal Clustering Protocol for Wireless Sensor Networks. Int. J. Distrib. Sens. Netw. 2011, 2011, 1–8. [Google Scholar] [CrossRef]
- Kima, N.; Heoa, J.; Kimb, H.S.; Kwona, W.H. Reconfiguration of Clusterheads for Load Balancing in Wireless Sensor Networks. Comput. Commun. 2008, 31, 153–159. [Google Scholar] [CrossRef]
- Nie, P.; Jin, Z.; Gong, Y. Mires++: A Reliable, Energy-Aware Clustering Algorithm for Wireless Sensor Networks. In Proceedings of the 13th ACM International Conference on Modeling, Analysis, and Simulation of Wireless and Mobile, Bodrum, Turkey, 17–21 October 2010. [Google Scholar]
- Wei, D.; Jin, Y.; Vural, S.; Moessner, K.; Tafazolli, R. An Energy-Efficient Clustering Solution for Wireless Sensor Networks. IEEE Trans. Wirel. Commun. 2011, 10, 3973–3983. [Google Scholar] [CrossRef]
- Zhang, H.; Li, L.; Yan, X.; Li, X. A Load-balancing Clustering Algorithm of WSN for Data Gathering. In Proceedings of the 2011 2nd International Conference on Artificial Intelligence, Management Science and Electronic Commerce (AIMSEC), Deng Feng, China, 8–10 August 2011. [Google Scholar]
- Yu, J.; Qi, Y.; Wang, G. An energy-driven unequal clustering protocol for heterogeneous wireless sensor networks. J. Control Theory Appl. 2011, 9, 133–139. [Google Scholar] [CrossRef]
- Kumar, D. Performance analysis of energy efficient clustering protocols for maximising lifetime of wireless sensor networks. IET Wirel. Sens. Syst. 2012, 4, 9–16. [Google Scholar] [CrossRef]
- Chang, J.; Ju, P. An efficient cluster-based power saving scheme for wireless sensor networks. EURASIP J. Wirel. Commun. Netw. 2012, 2012, 172. [Google Scholar] [CrossRef]
- Liu, T.; Li, Q.; Liang, P. An energy-balancing clustering approach for gradient-based routing in wireless sensor networks. Comput. Commun. 2012, 35, 2150–2161. [Google Scholar] [CrossRef]
- Yu, J.; Qi, Y.; Wang, G.; Guo, Q.; Gu, X. A cluster-based routing protocol for wireless sensor networks with nonuniform node distribution. Int. J. Electron. Commun. 2012, 66, 54–61. [Google Scholar] [CrossRef]
- Kuila, P.; Jana, P.K. An Energy Balanced Distributed Clustering and Routing Algorithm for Wireless Sensor Networks. IEEE Int. Conf. Parallel Distrib. Grid Comput. 2012, 2, 220–225. [Google Scholar]
- Nikolidakis, S.A.; Kandris, D.; Vergados, D.D.; Douligeris, C. Energy Efficient Routing in Wireless Sensor Networks Through Balanced Clustering. Algorithms 2013, 6, 29–42. [Google Scholar] [CrossRef]
- Li, H.; Liu, Y.; Chen, W.; Jia, W.; Li, B.; Xiong, J. COCA: Constructing optimal clustering architecture to maximize sensor network lifetime. Comput. Commun. 2013, 36, 256–268. [Google Scholar] [CrossRef]
- Mardini, W.; Yassein, M.B.; Khamayseh, Y.; Ghaleb, B.A. Rotated Hybrid, Energy-Efficient and Distributed (R-HEED) Clustering Protocol in WSN. WSEAS Trans. Commun. 2014, 13, 275–290. [Google Scholar]
- Hoang, D.C.; Yadav, P.; Kumar, R.; Panda, S.K. Real-Time Implementation of a Harmony Search Algorithm-Based Clustering Protocol for Energy-Efficient Wireless Sensor Networks. IEEE Trans. Ind. Inf. 2014, 10, 774–783. [Google Scholar] [CrossRef]
- Amgoth, T.; Jana, P.K. Energy-aware routing algorithm for wireless sensor networks. Comput. Electr. Eng. 2015, 2015, 357–367. [Google Scholar] [CrossRef]
- Eshaftri, M.; Al-Dubai, A.Y.; Romdhani, I.; Yassien, M.B. A New Energy Efficient Cluster based Protocol for Wireless Sensor Networks. In Proceedings of the 2015 Federated Conference on Computer Science and Information Systems (FedCSIS), Lodz, Poland, 13–16 September 2015. [Google Scholar]
- Yahya, H.; Al-Nidawi, Y.; Kemp, A.H. A Dynamic Cluster Head Election Protocol for Mobile Wireless Sensor Networks. In Proceedings of the 2015 International Symposium on Wireless Communication Systems (ISWCS), Brussels, Belgium, 25–28 August 2015. [Google Scholar]
- Tinker, M.S.; Chinara, S. Energy Conservation Clustering in Wireless Sensor Networks for Increased Life Time. In Proceedings of the 2015 Second International Conference on Advances in Computing and Communication Engineering, Dehradun, India, 1–2 May 2015. [Google Scholar]
- Lin, D.; Wang, W. A game theory based energy efficient clustering routing protocol for WSNs. Wirel. Netw. 2017, 23, 1101. [Google Scholar] [CrossRef]
- Lee, S.; Yoo, J.; Chung, T. Distance-based Energy Efficient Clustering for Wireless Sensor Networks. In Proceedings of the 29th Annual IEEE International Conference on Local Computer Networks, Tampa, FL, USA, 16–18 November 2004. [Google Scholar]
- Mandala, D.; Du, X.; Dai, F.; You, C. Load Balance and Energy Efficient Data Gathering in Wireless Sensor Networks. MOBHOC 2006. [Google Scholar] [CrossRef]
- Mandala, D.; Du, X.; Dai, F.; You, C. Load balance and energy efficient data gathering in wireless sensor networks. Wirel. Commun. Mobile Comput. 2008, 8, 645–659. [Google Scholar] [CrossRef]
- Amini, N.; Vahdatpour, A.; Xu, W.; Gerla, M.; Sarrafzadeh, M. Cluster size optimization in sensor networks with decentralized cluster-based protocols. Comput. Commun. 2012, 35, 207–220. [Google Scholar] [CrossRef] [PubMed]
- Kang, S.H.; Nguyen, T. Distance Based Thresholds for Cluster Head Selection in Wireless Sensor Networks. IEEE Commun. Lett. 2012, 16, 1396–1399. [Google Scholar] [CrossRef]
- Xie, R.; Jia, X. Transmission-Efficient Clustering Method for Wireless Sensor Networks Using Compressive Sensing. IEEE Trans. Parallel Distrib. Syst. 2014, 25, 806–815. [Google Scholar]
- Amis, A.D.; Prakash, R. Load-Balancing Clusters in Wireless Ad Hoc Networks. Appl. Spec. Syst. Softw. Eng. Technol. 2000, 3, 25–32. [Google Scholar]
- Muruganathan, S.D.; Ma, D.C.F.; Bhasin, R.I.; Fapojuwo, A.O. A Centralized Energy-Efficient Routing Protocol for Wireless Sensor Networks. IEEE Commun. Mag. 2005, 43, S8–S13. [Google Scholar] [CrossRef]
- Jabbar, S.; Butt, A.E.; Sahar, N.U.; Minhas, A.A. Threshold based load balancing protocol for energy efficient routing in WSN. In Proceedings of the 2011 13th International Conference on Advanced Communication Technology (ICACT), Gangwon-Do, Korea, 13–16 February 2011; pp. 196–201. [Google Scholar]
- Li, J.; Cao, B.; Wang, L.; Wang, W. Energy Optimized Approach Based on Clustering Routing Protocol for Wireless Sensor Networks. In Proceedings of the 2013 25th Chinese Control and Decision Conference (CCDC), Guiyang, China, 25–27 May 2013. [Google Scholar]
- Pal, V.; Singh, G.; Yadav, R.P. Balanced Cluster Size Solution to Extend Lifetime of Wireless Sensor Networks. IEEE Internet Things J. 2015, 2, 399–401. [Google Scholar] [CrossRef]
- Sabbineni, H.; Chakrabarty, K. Location-Aided Flooding: An Energy-Efficient Data Dissemination Protocol for Wireless Sensor Networks. IEEE Trans. Comput. 2005, 54, 36–46. [Google Scholar] [CrossRef]
- Wu, C.; Yaun, R.; Zhou, H. A novel Load Balanced and Lifetime Maximization Routing Protocol in Wireless Sensor Networks. In Proceedings of the VTC Spring 2008 - IEEE Vehicular Technology Conference, Marina Bay, Singapore, 11–14 May 2008. [Google Scholar]
- Wang, C.; Wu, W. A Load-balance Routing Algorithm for Multi-sink Wireless Sensor Networks. In Proceedings of the 2009 International Conference on Communication Software and Networks, Chengdu, China, 27–28 February 2009. [Google Scholar]
- Cheng, S.; Chang, T. An adaptive learning scheme for loading balancing with zone partition in multi-sink wireless sensor network. Expert Syst. Appl. 2012, 39, 9427–9434. [Google Scholar] [CrossRef]
- Mahadevaswamy, U.B.; Shanmukhaswamy, M.N. Reliable and Load Balanced Multi-path Routing for Multiple Sinks in Wireless Sensor Networks. Int. J. Comput. Appl. 2012, 50, 14–21. [Google Scholar]
- Zhang, Z.; Ma, M.; Yang, Y. Energy Efficient Multi-Hop Polling in Clusters of Two-Layered Heterogeneous Sensor Networks. IEEE Trans. Comput. 2008, 57, 231–245. [Google Scholar] [CrossRef]
- Wang, A.; Yang, D.; Sun, D. A clustering algorithm based on energy information and cluster heads expectation for wireless sensor networks. Comput. Electr. Eng. 2012, 38, 662–671. [Google Scholar] [CrossRef]
- Ghiasi, S.; Srivastava, A.; Yang, X.; Sarrafzadeh, M. Optimal Energy Aware Clustering in Sensor Networks. Sensors 2002, 2, 258–269. [Google Scholar] [CrossRef]
- Bandyopadhyay, S.; Coyle, E.J. An Energy Efficient Hierarchical Clustering Algorithm for Wireless Sensor Networks. IEEE INFOCOM 2003, 3, 1713–1723. [Google Scholar]
- Gupta, G.; Younis, M. Load-balanced clustering in wireless sensor networks. In Proceedings of the 2003 IEEE International Conference on Communications, Anchorage, AK, USA, 11–15 May 2003. [Google Scholar]
- Younis, O.; Fahmy, S. Distributed clustering in Ad-hoc sensor networks: A hybrid, energy-efficient approach. In Proceedings of the 2004 IEEE INFOCOM, Hong Kong, China, 7–11 March 2004. [Google Scholar]
- Soro, S.; Heinzelman, W. Prolonging the Lifetime of Wireless Sensor Networks via Unequal Clustering. IEEE Int. Parallel Distrib. Process. Symp. 2005, 18, 1–8. [Google Scholar]
- Kim, B.; Kim, I. Energy Aware Routing Protocol in Wireless Sensor Networks. Int. J. Comput. Sci. Netw. Secur. 2006, 6, 201–207. [Google Scholar]
- Ma, M.; Yang, Y. Clustering and Load Balancing in Hybrid Sensor Networks with Mobile Cluster Heads. Int. Conf. Qual. Serv. Heterog. Wired/Wirel. Netw. 2006, 3, 1–10. [Google Scholar]
- Chang, R.; Kuo, C. An Energy Efficient Routing Mechanism for Wireless Sensor Networks. In Proceedings of the 20th International Conference on Advanced Information Networking and Applications, Vienna, Austria, 18–20 April 2006; pp. 1–5. [Google Scholar]
- Israr, N.; Awan, I. Multihop Clustering Algorithm for Load Balancing in Wireless Sensor Networks. IJSSST 2007, 8, 13–25. [Google Scholar]
- Low, C.P.; Fang, C.; Ng, J.M.; Ang, Y.J. Efficient Load-balancing Clustering Algorithms for Wireless Sensor Networks. Comput. Commun. 2008, 31, 750–759. [Google Scholar] [CrossRef]
- Bari, A.; Jaekel, A.; Bandyopadhyay, S. Clustering Strategies for improving the lifetime of two-tiered sensor networks. Comput. Commun. 2008, 31, 3451–3459. [Google Scholar] [CrossRef]
- Lotf, J.J.; Bonab, M.N.; Khorsandi, S. A Novel cluster-based routing protocol with extending lifetime for wireless sensor networks. In Proceedings of the 2008 5th IFIP International Conference on Wireless and Optical Communications Networks (WOCN ’08), Surabaya, Indonesia, 5–7 May 2008. [Google Scholar]
- Huang, Y.; Su, B.; Wang, M. Localized and load-balanced clustering for energy saving in wireless sensor networks. Int. J. Commun. Syst. 2008, 21, 799–814. [Google Scholar] [CrossRef]
- Du, X.; Xiao, Y.; Dai, F. Increasing network lifetime by balancing node energy consumption in heterogeneous sensor networks. Wirel. Commun. Mobile Comput. 2008, 8, 125–136. [Google Scholar] [CrossRef]
- Chen, G.; Li, C.; Ye, M.; Wu, J. An unequal cluster-based routing protocol in wireless sensor networks. Wirel. Netw. 2009, 15, 193–207. [Google Scholar] [CrossRef]
- Kandris, D.; Tsioumas, P.; Tzes, A.; Nikolakopoulos, G.; Vergados, D.D. Power Conservation through Energy Efficient Routing in Wireless Sensor Networks. Sensors 2009, 9, 7320–7342. [Google Scholar] [CrossRef] [PubMed]
- Liu, M.; Cao, J.; Chen, G.; Wang, X. An Energy-Aware Routing Protocol in Wireless Sensor Networks. Sensors 2009, 9, 445–462. [Google Scholar] [CrossRef] [PubMed]
- Dimokas, N.; Katsaros, D.; Manolopoulos, Y. Energy-efficient distributed clustering in wireless sensor networks. J. Parallel Distrib. Comput. 2010, 70, 371–383. [Google Scholar] [CrossRef]
- Khulbe, M.; Srivastava, P.; Jain, R.C. Parametric Protocol for Energy Efficient Cluster Head Selection (PPEECS) in WSNs. In Proceedings of the 2010 16th Asia-Pacific Conference on Communications (APCC), Auckland, New Zealand, 31 October–3 November2010. [Google Scholar]
- Zarei, B.; Zeynali, M.; Nezhad, V.M. Novel Cluster Based Routing Protocol in Wireless Sensor Networks. Int. J. Comput. Sci. Issue 2010, 7, 32–36. [Google Scholar]
- Nurhayati; Choi, S.H.; Lee, K.O. A Cluster Based Energy Efficient Location Routing Protocol in Wireless Sensor Networks. Int. J. Comput. Commun. 2011, 5, 67–74. [Google Scholar]
- Merzoug, M.A.; Boukerram, A. Cluster-Based Communication Protocol for Load Balancing in Wireless Sensor Networks. Int. J. Adv. Comput. Sci. Appl. 2011, 3, 105–112. [Google Scholar]
- Wajgi, D.; Thakur, N.V. Load Balancing Based Approach to Improve Lifetime of Wireless Sensor Network. J. Wirel. Mob. Netw. 2012, 4, 155–167. [Google Scholar] [CrossRef]
- Anisi, M.H.; Abdullah, A.H.; Razak, S.A. Energy-efficient and reliable data delivery in wireless sensor networks. Wirel. Netw. 2012, 19, 495–505. [Google Scholar] [CrossRef]
- Kuila, P.; Jana, P.K. Energy Efficient Load-Balanced Clustering Algorithm for Wireless Sensor Networks. Procedia Technol. 2012, 6, 771–777. [Google Scholar] [CrossRef]
- Gupta, G.; Younis, M. Performance Evaluation of Load-Balanced Clustering of Wireless Sensor Networks. In Proceedings of the 10th International Conference on Telecommunications, Papeete, French, 23 February–1 March 2013. [Google Scholar]
- Kuila, P.; Gupta, S.K.; Jana, P.K. A novel evolutionary approach for load balanced clustering problem for wireless sensor networks. Swarm Evol. Comput. 2013, 12, 48–56. [Google Scholar] [CrossRef]
- Anitha, R.U.; Kamalakkannan, P. Energy efficient cluster head selection algorithm in mobile wireless sensor networks. In Proceedings of the 2013 International Conference on Computer Communication and Informatics, Coimbatore, India, 4–6 January 2013. [Google Scholar]
- Soleimani, M.; Sharifian, A.; Fanian, A. An energy-efficient clustering algorithm for large scale wireless sensor networks. In Proceedings of the 2013 21st Iranian Conference on Electrical Engineering (ICEE), Mashhad, Iran, 14–16 May 2013. [Google Scholar]
- Suharjono, A.; Wirawan; Hendrantoro, G. Hop Distances Optimization for Balancing The Energy Consumption of Multi-hop Clustered Wireless Sensor Networks. In Proceedings of the 2013 International Conference on Computer, Control, Informatics and Its Applications (IC3INA), Jakarta, Indonesia, 19–21 November 2013; pp. 49–52. [Google Scholar]
- Kuila, P.; Jana, P.K. Approximation schemes for load balanced clustering in wireless sensor networks. J. Supercomput. 2014, 68, 87–105. [Google Scholar] [CrossRef]
- Saranya, A.; Senthilkumaran, R.; Nagarajan, G. Enhancing network lifetime using tree based routing protocol in wireless sensor networks. ICECS 2015, 2, 1392–1396. [Google Scholar]
- Wang, N.; Zhou, Y.; Liu, J. An Efficient Routing Algorithm to Prolong Network Lifetime in Wireless Sensor Networks. ChinaCom 2015, 10, 322–325. [Google Scholar]
- Shokouhifar, M.; Jalali, A. A new evolutionary based application specific routing protocol for clustered wireless sensor networks. Int. J. Electron. Commun. 2015, 69, 432–441. [Google Scholar] [CrossRef]
- Xu, Z.; Chen, L.; Liu, T.; Cao, L.; Chen, C. Balancing Energy Consumption with Hybrid Clustering and Routing Strategy in Wireless Sensor Networks. Sensors 2015, 15, 26583–26605. [Google Scholar] [CrossRef] [PubMed]
- Hammoudeh, M.; Newman, R. Adaptive routing in wireless networks: QoS optimisation for enhanced application performance. Inf. Fusion 2015, 22, 3–15. [Google Scholar] [CrossRef]
- Leu, J.; Chiang, T.; Yu, M.; Su, K. Energy Efficient Clustering Scheme for Prolonging the Lifetime of Wireless Sensor Network With Isolated Nodes. IEEE Commun. Lett. 2015, 19, 259–262. [Google Scholar] [CrossRef]
- Vijayan, K.; Raaza, A. Novel Cluster Arrangement Energy Efficient Routing Protocol for Wireless Sensor Networks. Indian J. Sci. Technol. 2016, 9, 1–9. [Google Scholar] [CrossRef]
- Liu, Q.; Zhang, K.; Shen, J.; Fu, Z.; Linge, N. GLRM: An improved grid-based load-balanced routing method for WSN with single controlled mobile sink. Int. J. Comput. Electron. Res. 2016, 18, 34–38. [Google Scholar]
- Tunca, C.; Isik, S.; Donmez, M.Y.; Ersoy, C. Ring Routing: An Energy-Efficient Routing Protocol for Wireless Sensor Networks with a Mobile Sink. IEEE Trans. Mobile Comput. 2015, 14, 1947–1960. [Google Scholar] [CrossRef]
- Wang, J.; Zhang, Z.; Xia, F.; Yuan, W.; Lee, S. An Energy Efficient Stable Election-Based Routing Algorithm for Wireless Sensor Networks. Sensors 2013, 13, 14301–14320. [Google Scholar] [CrossRef] [PubMed]
- Saraswat, L.; Kumar, S. Comparative study of Load Balancing Techniques for Optimization of Network Lifetime in Wireless Sensor Networks. Int. J. Comput. Electron. Res. 2013, 2, 189–193. [Google Scholar]
- Chang, J.; Tassiulas, L. Energy Conserving Routing in Wireless Ad-hoc Networks. IEEE INFOCOM 2000, 1, 22–31. [Google Scholar]
- Hong, X.; Gerla, M.; Wang, H. Load Balanced, Energy-Aware Communications for Mars Sensor Networks. In Proceedings of the 2002 IEEE Aerospace Conference, Big Sky, MT, USA, 9–16 March 2002; pp. 1109–1115. [Google Scholar]
- Chang, J.; Tassiulas, L. Maximum Lifetime Routing in Wireless Sensor Networks. IEEE/ACM Trans. Netw. 2004, 12, 609–619. [Google Scholar] [CrossRef]
- Lu, Y.M.; Won, V.W.S. An energy-efficient multipath routing protocol for wireless sensor networks. Int. J. Commun. Syst. 2007, 20, 747–766. [Google Scholar]
- Vidhyapriya, R.; Vanathi, P.T. Energy Efficient Adaptive Multipath Routing for Wireless Sensor Networks. IAENG Int. J. Comput. Sci. 2007, 34, 1–8. [Google Scholar]
- Eghbali, A.N.; Dehghan, M. Load-balancing using multi-path directed diffusion in wireless sensor networks. Int. Conf. Mobile Adhoc Sens. Netw. 2007, 3, 44–55. [Google Scholar]
- Teo, J.; Ha, Y.; Tham, C. Interference-Minimized Multipath Routing with Congestion Control in Wireless Sensor Network for High-Rate Streaming. IEEE Trans. Mobile Comput. 2008, 7, 1124–1137. [Google Scholar]
- Kim, M.; Jeong, E.; Bang, Y.; Hwang, S.; Kim, B. Multipath Energy-aware Routing Protocol in Wireless Sensor Networks. In Proceedings of the 5th International Conference on Networked Sensing Systems, Kanazawa, Japan, 17–19 June 2008. [Google Scholar]
- Tao, M.; Lu, D.; Yang, J. An Adaptive Energy-aware Multi-path Routing Protocol with Load Balance for Wireless Sensor Networks. Wirel. Pers. Commun. 2010, 63, 823–846. [Google Scholar] [CrossRef]
- Tan, M.-H.; Yu, R.-L.; Li, S.-J.; Wang, X.-D. Multipath Routing Protocol with Load Balancing in WSN Considering Interference. IEEE Conf. Ind. Electron. Appl. 2011, 6, 1062–1067. [Google Scholar]
- Mahadevaswamy, U.B.; Shanmukhaswamy, M.N. Delay Aware and Load Balanced Multi-Path Routing in Wireless Sensor Networks. Int. J. Wirel. Inf. Netw. 2012, 19, 278–285. [Google Scholar] [CrossRef]
- Yilmaz, O.; Demirci, S.; Kaymak, Y.; Erguna, S.; Yildirim, A. Shortest hop multipath algorithm for wireless sensor networks. Comput. Math. Appl. 2012, 63, 48–59. [Google Scholar] [CrossRef]
- Moghadam, M.N.; Taheri, H.; Karrari, M. Minimum cost load balanced multipath routing protocol for low power and lossy networks. Wirel. Netw. 2014, 20, 2469–2479. [Google Scholar] [CrossRef]
- Moghadam, M.N.; Taheri, H. High Throughput Load Balanced Multipath Routing in Homogeneous Wireless Sensor Networks. In Proceedings of the 2014 22nd Iranian Conference on Electrical Engineering (ICEE), Tehran, Iran, 20–22 May 2014. [Google Scholar]
- Sunitha, G.P.; Vijay Kumar, B.P.; Dilip Kumar, S.M. Optimized Congestion Aware Energy Efficient Traffic Load Balancing Scheme for Routing in Wireless Sensor Networks. In Proceedings of the 2015 International Conference on Information Processing (ICIP), Pune, India, 16–19 December 2015. [Google Scholar]
- Sivakumar, M.; Divakaran, J. Load balancing based energy efficient routing approach for heterogeneous wireless sensor networks. In Proceedings of the 2015 Online International Conference on Green Engineering and Technologies (IC-GET), Coimbatore, India, 27 November 2015. [Google Scholar]
- Mueller, S.; Tsang, R.; Ghosal, D. Multipath Routing in Mobile Ad Hoc Networks: Issues and Challenges. Lect. Note. Comput. Sci. 2004, 2965, 209–234. [Google Scholar]
- Ganesan, D.; Govindan, R.; Shenker, S.; Estrin, D. Highly-Resilient, Energy-Efficient Multipath Routing in Wireless Sensor Networks. Mobile Comput. Commun. Rev. 2001, 5, 11–25. [Google Scholar] [CrossRef]
- Hassanein, H.; Luo, J. Reliable Energy Aware Routing in Wireless Sensor Networks. IEEE Workshop Depend. Secur. Sens. Netw. Syst. 2006, 2, 54–64. [Google Scholar]
- Deb, B.; Bhatnagar, S.; Nath, B. ReInForM: Reliable Information Forwarding Using Multiple Paths in Sensor Networks. IEEE Int. Conf. Local Comput. Netw. 2003, 28, 406–415. [Google Scholar]
- Huang, X.; Fang, Y. Multiconstrained QoS Multipath Routing in Wireless Sensor Networks. J. Wirel. Netw. 2007, 14, 465–478. [Google Scholar] [CrossRef]
- Li, S.; Neelisetti, R.K.; Liu, C.; Lim, A. Efficient Multi-Path protocol for Wireless Sensor Networks. Int. J. Wirel. Mobile Netw. 2010, 2, 110–130. [Google Scholar]
- Radi, M.; Dezfouli, B.; Razak, S.A.; Bakar, K.A. LIEMRO: A Low-Interference Energy-Efficient Multipath Routing Protocol for Improving QoS in Event-Based Wireless Sensor Networks. SENSORCOMM 2010, 4, 551–557. [Google Scholar]
- Shah, R.C.; Rabaey, J.M. Energy Aware Routing for Low Energy Ad Hoc Sensor Networks. In Proceedings of the 2002 IEEE Wireless Communications and Networking Conference, Orlando, FL, USA, 17–21 March 2002. [Google Scholar]
- Zhang, D.; Li, G.; Zheng, K.; Ming, X.; Pan, Z. An Energy-Balanced Routing Method Based on Forward-Aware Factor for Wireless Sensor Networks. IEEE Trans. Ind. Inf. 2014, 10, 766–773. [Google Scholar] [CrossRef]
- Puccinelli, D.; Haenggi, M. Arbutus: Network-Layer Load Balancing for Wireless Sensor Networks. In Proceedings of the 2008 IEEE Wireless Communications and Networking Conference, San Francisco, CA, USA, 31 March 2008–3 April 2008. [Google Scholar]
- Eghbali, A.N.; Javan, N.T.; Dareshoorzadeh, A.; Dehghan, M. An Energy Efficient Load-Balanced Multi-Sink Routing Protocol for Wireless Sensor Networks. In Proceedings of the 2009 10th International Conference on Telecommunications, Zagreb, Croatia, 8–10 June 2009. [Google Scholar]
- Ren, F.; Zhang, J.; He, T.; Lin, C.; Das, S.K. EBRP: Energy-Balanced Routing Protocol for Data Gathering in Wireless Sensor Networks. IEEE Trans. Parallel Distrib. Syst. 2011, 22, 2106–2125. [Google Scholar] [CrossRef]
- Hsiao, P.; Hwang, A.; Kung, H.T.; Vlah, D. Load-Balancing Routing for Wireless Access Networks. IEEE INFOCOM 2001, 2, 1–10. [Google Scholar]
- Kacimi, R.; Dhaou, R.; Beylot, A. Load-Balancing Strategies for Lifetime Maximizing in Wireless Sensor Networks. In Proceedings of the 2010 IEEE International Conference on Communication, Cape Town, South Africa, 23–27 May 2010. [Google Scholar]
- Khan, N.A.; Saghar, K.; Ahmad, R.; Kiani, A. Achieving Energy Efficiency through Load Balancing: A Comparison through Formal Verification of two WSN Routing Protocols. IBCAST 2016, 13, 350–354. [Google Scholar]
- Haenggi, M. Energy-Balancing Strategies for Wireless Sensor Networks. ISCAS 2003, 4, 828–831. [Google Scholar]
- Cianci, C.M.; Trifa, V.; Martinoli, A. Threshold-based algorithms for power-aware load balancing in sensor networks. In Proceedings of the 2005 IEEE Swarm Intelligence Symposium, Pasadena, CA, USA, 8–10 June 2005. [Google Scholar]
- Slama, I.; Jouaber, B.; Zeghlache, D. Routing for Wireless Sensor Networks Lifetime Maximisation under Energy Constraints. Conf. Mobile Technol. Appl. Syst. 2006, 3, 1–5. [Google Scholar]
- Fyffe, M.; Sun, M.; Ma, X. Traffic-Adapted Load Balancing in Sensor Networks Employing Geographic Routing. Proceedings of trhe 2007 IEEE Wireless Communications and Networking Conference, Hong Kong, China, 11–15 March 2007. [Google Scholar]
- Vidhyapriya, R.; Vanathi, P.T. Energy Aware Routing for Wireless Sensor Networks. In Proceedings of the 2007 International Conference on Signal Processing, Communications and Networking, Chennai, India, 22–24 February 2007. [Google Scholar]
- Zytoune, O.; El aroussi, M.; Aboutajdine, D. A Uniform Balancing Energy Routing Protocol for Wireless Sensor Networks. Wirel. Pers. Commun. 2009, 55, 147–161. [Google Scholar] [CrossRef]
- Ok, C.; Lee, S.; Mitra, P.; Kumara, S. Distributed energy balanced routing for wireless sensor networks. Comput. Ind. Eng. 2009, 57, 125–135. [Google Scholar] [CrossRef]
- Lin, Y.; Wu, Q. Energy-Conserving Dynamic Routing in Multi-Sink Heterogeneous Sensor Networks. In Proceedings of the 2010 International Conference on Communications and Mobile Computing, Shenzhen, China, 12–14 April 2010. [Google Scholar]
- Moad, S.; Hansen, M.T.; Jurdak, R.; Kusy, B.; Bouabdallah, N. Load Balancing Metric with Diversity for Energy Efficient Routing in Wireless Sensor Networks. Procedia Comput. Sci. 2011, 5, 804–811. [Google Scholar] [CrossRef]
- Dong, Y.; Chang, H.; Zou, Z.; Tang, S. An Energy Conserving Routing Algorithm for Wireless Sensor Networks. Int. J. Future Gener. Commun. Netw. 2011, 4, 39–54. [Google Scholar]
- Yao, Y.; Cao, Q.; Vasilakos, A.V. EDAL: An Energy-Efficient, Delay-Aware, and Lifetime-Balancing Data Collection Protocol for Wireless Sensor Network. In Proceedings of the 2013 IEEE 10th International Conference on Mobile Ad-Hoc and Sensor Systems, Zhejiang, China, 14–16 October 2013. [Google Scholar]
- Kacimi, R.; Dhaou, R.; Beylot, A. Load balancing techniques for lifetime maximizing in wireless sensor networks. Ad Hoc Netw. 2013, 11, 2172–2186. [Google Scholar] [CrossRef]
- Yao, Y.; Cao, Q.; Vasilakos, A.V. EDAL: An Energy-Efficient, Delay-Aware, and Lifetime-Balancing Data Collection Protocol for Heterogeneous Wireless Sensor Networks. IEEE/ACM Trans. Netw. 2015, 23, 810–823. [Google Scholar] [CrossRef]
- Chang, J.; Jan, R. An Energy Aware, Cluster-based Routing Algorithm for Wireless Sensor Networks. J. Inf. Sci. Engineering. 2005, 26, 2159–2171. [Google Scholar]
- Ye, M.; Li, C.; Chen, G.; Wu, J. EECS: An Energy Efficient Clustering Scheme in Wireless Sensor Networks. In Proceedings of the 24th IEEE International Performance, Computing, and Communications Conference, Phoenix, AZ, USA, 7–9 April 2005. [Google Scholar]
- Qing, L.; Zhu, Q.; Wang, M. Design of distributed energy-efficient clustering algorithm for heterogeneous wireless sensor networks. Comput. Commun. 2006, 29, 2230–2237. [Google Scholar] [CrossRef]
- Wang, R.; Liu, G.; Zheng, C. A clustering algorithm based on virtual area partition for heterogeneous wireless sensor networks. In Proceedings of the 2007 International Conference on Mechatronics and Automation, Harbin, China, 5–8 August 2007. [Google Scholar]
- Cheng, L.; Qian, D.; Wu, W. An Energy Efficient Weight-clustering Algorithm in Wireless Sensor Networks. In Proceedings of the 2008 Japan-China Joint Workshop on Frontier of Computer Science and Technology, Wuhan, China, 27–28 December 2008. [Google Scholar]
- Kumar, D.; Aseri, T.C.; Patel, R.B. EEHC: Energy Efficient Heterogeneous Clustered Scheme for Wireless Sensor Networks. Comput. Commun. 2008, 32, 662–667. [Google Scholar] [CrossRef]
- Su, X.; Choi, D.; Moh, S.; Chung, I. An Energy-Efficient Clustering for Normal Distributed Sensor Networks. Recent Adv. Softw. Eng. Parallel Distrib. Syst. 2009, 81–84. Available online: https://pdfs.semanticscholar.org/352f/9bf1ae74668668ad151712086f7b015fdedf.pdf (accessed on 21 April 2017).
- Buyanjargal, O.; Kwon, Y. AEEC-Adaptive and Energy Efficient Clustering Algorithm for Content based Wireless Sensor Networks. In Proceedings of the 2009 2nd International Conference on Computer Science and its Applications, Jeju, Korea, 10–12 December 2009. [Google Scholar]
- Bajaber, F.; Awan, I. Adaptive decentralized re-clustering protocol for wireless sensor networks. J. Comput. Syst. Sci. 2011, 77, 282–292. [Google Scholar] [CrossRef]
- Khalil, E.A.; Attea, B.A. Energy-aware evolutionary routing protocol for dynamic clustering of wireless sensor networks. Swarm Evol. Comput. 2011, 10, 195–203. [Google Scholar] [CrossRef]
- Yue, J.; Zhang, W.; Xiao, W.; Tang, D.; Tang, J. Energy Efficient and Balanced Cluster-Based Data Aggregation Algorithm for Wireless Sensor Networks. Procedia Eng. 2012, 29, 2009–2015. [Google Scholar] [CrossRef]
- Tarachand, A.; Kumar, V.; Raj, A.; Kumar, A.; Jana, P.K. An Energy Efficient Load Balancing Algorithm for Cluster-Based Wireless Sensor Networks. In Proceedings of the 2012 Annual IEEE India Conference (INDICON), Kochi, India, 7–9 December 2012. [Google Scholar]
- Lin, D.; Wang, Q.; Lin, D.; Deng, Y. An Energy-Efficient Clustering Routing Protocol Based on Evolutionary Game Theory in Wireless Sensor Networks. Int. J. Distrib. Sens. Netw. 2015, 2015, 1–12. [Google Scholar] [CrossRef]
- Biswas, S.; Saha, J.; Nag, T.; Chowdhury, C.; Neogy, S. A Novel Cluster Head Selection Algorithm for Energy-Efficient Routing in Wireless Sensor Network. In Proceedings of the 2016 IEEE 6th International Conference on Advanced Computing (IACC), Bhimavaram, India, 27–28 February 2016. [Google Scholar]











{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Year | Survey Paper | Contributions |
|---|---|---|
| 2002 | [30,31] |
|
| 2004 | [11] |
|
| 2005 | [32] |
|
| 2006 | [12] |
|
| 2007 | [13] |
|
| 2008 | [33] |
|
| 2009 | [34] |
|
| 2010 | [38] |
|
| 2011 | [35] |
|
| 2011 | [36] |
|
| 2011 | [14] |
|
| 2012 | [39] |
|
| 2012 | [15] |
|
| 2012 | [37] |
|
| 2012 | [16] |
|
| 2012 | [17] |
|
| 2013 | [18] |
|
| 2013 | [4] |
|
| 2014 | [10] |
|
| 2016 | [19] |
|
| Year | Clustering Routing Protocol | HM | HT | CH Rotation | Decision Variables (CH Selection) | LA | Decision Variables (Cluster Formation) | |||||||||
|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|
| RE | DBS | HCBS | TB | TPBS | Predefined | RE | DCH | HCCH | TPCH | Others | ||||||
| 2000 | [89] | ✓ | ✓ | ✓ | ✓ | |||||||||||
| 2002 | [101] | ✓ | ✓ | ✓ | ✓ | |||||||||||
| 2003 | [102] | ✓ | ✓ | ✓ | ✓ | ✓ | ✓ | |||||||||
| 2003 | [55] | ✓ | ✓ | ✓ | ✓ | |||||||||||
| 2003 | [103] | ✓ | ✓ | ✓ | ||||||||||||
| 2004 | [56] | ✓ | ✓ | ✓ | ✓ | ✓ | ✓ | |||||||||
| 2004 | [83] | ✓ | ✓ | ✓ | ✓ | |||||||||||
| 2004 | [104] | ✓ | ✓ | ✓ | ✓ | ✓ | ✓ | |||||||||
| 2005 | [105] | ✓ | ✓ | ✓ | ✓ | ✓ | ||||||||||
| 2005 | [90] | ✓ | ✓ | ✓ | ✓ | ✓ | ||||||||||
| 2005 | [57] | ✓ | ✓ | ✓ | ✓ | |||||||||||
| 2005 | [58] | ✓ | ✓ | ✓ | ✓ | |||||||||||
| 2005 | [94] | ✓ | ✓ | |||||||||||||
| 2006 | [84] | ✓ | ✓ | ✓ | ✓ | |||||||||||
| 2006 | [106] | ✓ | ✓ | ✓ | ✓ | ✓ | ||||||||||
| 2006 | [107] | ✓ | ✓ | ✓ | ✓ | |||||||||||
| 2006 | [108] | ✓ | ✓ | ✓ | ✓ | ✓ | ||||||||||
| 2007 | [109] | ✓ | ✓ | ✓ | ✓ | ✓ | ✓ | |||||||||
| 2008 | [110] | ✓ | ✓ | ✓ | ||||||||||||
| 2008 | [95] | ✓ | ✓ | ✓ | ||||||||||||
| 2008 | [99] | ✓ | ✓ | ✓ | ||||||||||||
| 2008 | [111] | ✓ | ✓ | ✓ | ||||||||||||
| 2008 | [112] | ✓ | ✓ | ✓ | ✓ | ✓ | ||||||||||
| 2008 | [113] | ✓ | ✓ | ✓ | ✓ | ✓ | ✓ | |||||||||
| 2008 | [85] | ✓ | ✓ | ✓ | ✓ | |||||||||||
| 2008 | [114] | ✓ | ✓ | ✓ | ||||||||||||
| 2008 | [59] | ✓ | ✓ | ✓ | ✓ | |||||||||||
| 2008 | [60] | ✓ | ✓ | ✓ | ✓ | |||||||||||
| 2008 | [61] | ✓ | ✓ | ✓ | ✓ | ✓ | ||||||||||
| 2009 | [62] | ✓ | ✓ | ✓ | ✓ | ✓ | ||||||||||
| 2009 | [115] | ✓ | ✓ | ✓ | ✓ | ✓ | ||||||||||
| 2009 | [63] | ✓ | ✓ | ✓ | ✓ | |||||||||||
| 2009 | [96] | ✓ | ✓ | ✓ | ||||||||||||
| 2009 | [64] | ✓ | ✓ | ✓ | ✓ | |||||||||||
| 2009 | [116] | ✓ | ✓ | ✓ | ✓ | |||||||||||
| 2009 | [117] | ✓ | ✓ | ✓ | ✓ | ✓ | ||||||||||
| 2010 | [118] | ✓ | ✓ | ✓ | ✓ | ✓ | ||||||||||
| 2010 | [119] | ✓ | ✓ | ✓ | ✓ | ✓ | ||||||||||
| 2010 | [120] | ✓ | ✓ | ✓ | ✓ | ✓ | ✓ | ✓ | ✓ | |||||||
| 2010 | [65] | ✓ | ✓ | ✓ | ✓ | ✓ | ||||||||||
| 2011 | [66] | ✓ | ✓ | ✓ | ✓ | |||||||||||
| 2011 | [67] | ✓ | ✓ | ✓ | ✓ | ✓ | ||||||||||
| 2011 | [91] | ✓ | ✓ | ✓ | ✓ | ✓ | ✓ | |||||||||
| 2011 | [121] | ✓ | ✓ | ✓ | ✓ | ✓ | ||||||||||
| 2011 | [122] | ✓ | ✓ | ✓ | ✓ | ✓ | ||||||||||
| 2011 | [68] | ✓ | ✓ | ✓ | ✓ | |||||||||||
| 2012 | [69] | ✓ | ✓ | ✓ | ✓ | |||||||||||
| 2012 | [123] | ✓ | ✓ | ✓ | ✓ | ✓ | ✓ | |||||||||
| 2012 | [86] | ✓ | ✓ | ✓ | ✓ | |||||||||||
| 2012 | [70] | ✓ | ✓ | ✓ | ✓ | ✓ | ||||||||||
| 2012 | [71] | ✓ | ✓ | ✓ | ✓ | |||||||||||
| 2012 | [124] | ✓ | ✓ | ✓ | ✓ | |||||||||||
| 2012 | [125] | ✓ | ✓ | ✓ | ✓ | |||||||||||
| 2012 | [72] | ✓ | ✓ | ✓ | ✓ | |||||||||||
| 2012 | [97] | ✓ | ✓ | ✓ | ✓ | |||||||||||
| 2012 | [98] | ✓ | ✓ | ✓ | ||||||||||||
| 2012 | [87] | ✓ | ✓ | ✓ | ✓ | |||||||||||
| 2012 | [73] | ✓ | ✓ | ✓ | ✓ | |||||||||||
| 2013 | [74] | ✓ | ✓ | ✓ | ✓ | ✓ | ||||||||||
| 2013 | [75] | ✓ | ✓ | ✓ | ✓ | ✓ | ✓ | |||||||||
| 2013 | [126] | ✓ | ✓ | ✓ | ||||||||||||
| 2013 | [127] | ✓ | ✓ | ✓ | ||||||||||||
| 2013 | [92] | ✓ | ✓ | ✓ | ✓ | ✓ | ||||||||||
| 2013 | [128] | ✓ | ✓ | ✓ | ✓ | ✓ | ||||||||||
| 2013 | [129] | ✓ | ✓ | ✓ | ✓ | ✓ | ✓ | ✓ | ||||||||
| 2013 | [130] | ✓ | ✓ | ✓ | ✓ | ✓ | ||||||||||
| 2014 | [131] | ✓ | ✓ | ✓ | ✓ | |||||||||||
| 2014 | [76] | ✓ | ✓ | ✓ | ✓ | |||||||||||
| 2014 | [88] | ✓ | ✓ | ✓ | ✓ | |||||||||||
| 2014 | [77] | ✓ | ✓ | ✓ | ✓ | |||||||||||
| 2014 | [41] | ✓ | ✓ | ✓ | ✓ | |||||||||||
| 2015 | [132] | ✓ | ✓ | ✓ | ✓ | ✓ | ✓ | |||||||||
| 2015 | [133] | ✓ | ✓ | ✓ | ✓ | ✓ | ✓ | |||||||||
| 2015 | [78] | ✓ | ✓ | ✓ | ✓ | ✓ | ||||||||||
| 2015 | [79] | ✓ | ✓ | ✓ | ✓ | |||||||||||
| 2015 | [93] | ✓ | ✓ | ✓ | ✓ | |||||||||||
| 2015 | [80] | ✓ | ✓ | ✓ | ✓ | |||||||||||
| 2015 | [134] | ✓ | ✓ | ✓ | ✓ | ✓ | ||||||||||
| 2015 | [135] | ✓ | ✓ | ✓ | ✓ | ✓ | ✓ | |||||||||
| 2015 | [81] | ✓ | ✓ | ✓ | ✓ | |||||||||||
| 2015 | [136] | ✓ | ✓ | ✓ | ✓ | ✓ | ||||||||||
| 2015 | [137] | ✓ | ✓ | ✓ | ✓ | |||||||||||
| 2016 | [138] | ✓ | ✓ | ✓ | ✓ | ✓ | ||||||||||
| 2016 | [139] | ✓ | ✓ | ✓ | ✓ | ✓ | ||||||||||
| 2016 | [82] | ✓ | ✓ | ✓ | ✓ | ✓ | ||||||||||
| Year | Clustering Routing Protocol | Cluster Only | Intra-Cluster Communication (Decision Variables) | Inter-Cluster Communication (Decision Variables) | CHtoBS | Cluster Size | Optimization Approach | ||||||||||
|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|
| Direct | RE | Hop-Distance | Next Hop | Others | Direct | RE | Hop-Distance | Next Hop | Others | CH | nCH | Equal | Unequal | ||||
| 2000 | [89] | ✓ | ✓ | H | |||||||||||||
| 2002 | [101] | ✓ | ✓ | H | |||||||||||||
| 2003 | [102] | ✓ | ✓ | S | |||||||||||||
| 2003 | [55] | ✓ | ✓ | ✓ | ✓ | ✓ | ✓ | ✓ | ✓ | H | |||||||
| 2003 | [103] | ✓ | ✓ | ✓ | ✓ | ✓ | ✓ | ✓ | ✓ | H | |||||||
| 2004 | [56] | ✓ | ✓ | ✓ | ✓ | ✓ | ✓ | H | |||||||||
| 2004 | [83] | ✓ | ✓ | H | |||||||||||||
| 2004 | [104] | ✓ | ✓ | ✓ | ✓ | ✓ | ✓ | H | |||||||||
| 2005 | [105] | ✓ | ✓ | ✓ | ✓ | H | |||||||||||
| 2005 | [90] | ✓ | ✓ | ✓ | ✓ | H | |||||||||||
| 2005 | [57] | ✓ | ✓ | H | |||||||||||||
| 2005 | [58] | ✓ | ✓ | ✓ | ✓ | H | |||||||||||
| 2005 | [94] | ✓ | ✓ | ✓ | ✓ | ✓ | ✓ | ✓ | H | ||||||||
| 2006 | [84] | ✓ | ✓ | ✓ | ✓ | ✓ | ✓ | H | |||||||||
| 2006 | [106] | ✓ | ✓ | ✓ | ✓ | ✓ | ✓ | ✓ | S | ||||||||
| 2006 | [107] | ✓ | ✓ | H | |||||||||||||
| 2006 | [108] | ✓ | ✓ | ✓ | ✓ | ✓ | H | ||||||||||
| 2007 | [109] | ✓ | ✓ | ✓ | ✓ | ✓ | H | ||||||||||
| 2008 | [110] | ✓ | ✓ | ✓ | ✓ | ✓ | ✓ | L | |||||||||
| 2008 | [95] | ✓ | ✓ | ✓ | ✓ | ✓ | ✓ | L | |||||||||
| 2008 | [99] | ✓ | ✓ | ✓ | H | ||||||||||||
| 2008 | [111] | ✓ | ✓ | ✓ | ✓ | ✓ | ✓ | ✓ | ✓ | L | |||||||
| 2008 | [112] | ✓ | ✓ | ✓ | ✓ | ✓ | H | ||||||||||
| 2008 | [113] | ✓ | ✓ | ✓ | ✓ | ✓ | ✓ | S | |||||||||
| 2008 | [85] | ✓ | ✓ | ✓ | ✓ | ✓ | ✓ | H | |||||||||
| 2008 | [114] | ✓ | ✓ | ✓ | ✓ | ✓ | ✓ | ✓ | G | ||||||||
| 2008 | [59] | ✓ | ✓ | ✓ | ✓ | ✓ | H | ||||||||||
| 2008 | [60] | ✓ | ✓ | ✓ | ✓ | ✓ | H | ||||||||||
| 2008 | [61] | ✓ | ✓ | ✓ | ✓ | H | |||||||||||
| 2009 | [62] | ✓ | ✓ | ✓ | ✓ | ✓ | H | ||||||||||
| 2009 | [115] | ✓ | ✓ | ✓ | ✓ | ✓ | ✓ | H | |||||||||
| 2009 | [63] | ✓ | ✓ | ✓ | ✓ | ✓ | H | ||||||||||
| 2009 | [96] | ✓ | ✓ | ✓ | ✓ | ✓ | H | ||||||||||
| 2009 | [64] | ✓ | ✓ | H | |||||||||||||
| 2009 | [116] | ✓ | ✓ | ✓ | ✓ | ✓ | H | ||||||||||
| 2009 | [117] | ✓ | ✓ | ✓ | ✓ | ✓ | ✓ | ✓ | H | ||||||||
| 2010 | [118] | ✓ | ✓ | ✓ | ✓ | H | |||||||||||
| 2010 | [119] | ✓ | ✓ | H | |||||||||||||
| 2010 | [120] | ✓ | ✓ | ✓ | ✓ | ✓ | H | ||||||||||
| 2010 | [65] | ✓ | ✓ | H | |||||||||||||
| 2011 | [66] | ✓ | ✓ | ✓ | ✓ | ✓ | ✓ | H | |||||||||
| 2011 | [67] | ✓ | ✓ | ✓ | ✓ | ✓ | H | ||||||||||
| 2011 | [91] | ✓ | ✓ | ✓ | ✓ | ✓ | ✓ | ✓ | H | ||||||||
| 2011 | [121] | ✓ | ✓ | ✓ | ✓ | ✓ | H | ||||||||||
| 2011 | [122] | ✓ | ✓ | ✓ | ✓ | ✓ | H | ||||||||||
| 2011 | [68] | ✓ | ✓ | ✓ | ✓ | ✓ | H | ||||||||||
| 2012 | [69] | ✓ | ✓ | ✓ | ✓ | ✓ | H | ||||||||||
| 2012 | [123] | ✓ | ✓ | ✓ | ✓ | ✓ | H | ||||||||||
| 2012 | [86] | ✓ | ✓ | ✓ | ✓ | ✓ | H | ||||||||||
| 2012 | [70] | ✓ | ✓ | ✓ | ✓ | ✓ | H | ||||||||||
| 2012 | [71] | ✓ | ✓ | ✓ | ✓ | ✓ | H | ||||||||||
| 2012 | [124] | ✓ | ✓ | ✓ | ✓ | ✓ | ✓ | ✓ | H | ||||||||
| 2012 | [125] | ✓ | ✓ | ✓ | ✓ | ✓ | H | ||||||||||
| 2012 | [72] | ✓ | ✓ | ✓ | ✓ | ✓ | H | ||||||||||
| 2012 | [97] | ✓ | ✓ | ✓ | ✓ | ✓ | S | ||||||||||
| 2012 | [98] | ✓ | ✓ | ✓ | ✓ | ✓ | H | ||||||||||
| 2012 | [87] | ✓ | ✓ | ✓ | ✓ | ✓ | H | ||||||||||
| 2012 | [73] | ✓ | ✓ | ✓ | ✓ | ✓ | ✓ | ✓ | H | ||||||||
| 2013 | [74] | ✓ | ✓ | ✓ | ✓ | ✓ | S | ||||||||||
| 2013 | [75] | ✓ | ✓ | ✓ | ✓ | ✓ | H | ||||||||||
| 2013 | [126] | ✓ | ✓ | ✓ | ✓ | H | |||||||||||
| 2013 | [127] | ✓ | ✓ | ✓ | ✓ | ✓ | ✓ | E | |||||||||
| 2013 | [92] | ✓ | ✓ | ✓ | ✓ | ✓ | B | ||||||||||
| 2013 | [128] | ✓ | ✓ | ✓ | ✓ | ✓ | ✓ | H | |||||||||
| 2013 | [129] | ✓ | ✓ | ✓ | ✓ | ✓ | ✓ | H | |||||||||
| 2013 | [130] | ✓ | ✓ | ✓ | ✓ | ✓ | ✓ | H | |||||||||
| 2014 | [131] | ✓ | ✓ | ✓ | ✓ | ✓ | ✓ | ✓ | L | ||||||||
| 2014 | [76] | ✓ | ✓ | ✓ | ✓ | ✓ | ✓ | H | |||||||||
| 2014 | [88] | ✓ | ✓ | ✓ | ✓ | ✓ | H | ||||||||||
| 2014 | [77] | ✓ | ✓ | ✓ | ✓ | ✓ | M | ||||||||||
| 2014 | [41] | ✓ | ✓ | ✓ | ✓ | ✓ | B | ||||||||||
| 2015 | [132] | ✓ | ✓ | ✓ | ✓ | ✓ | ✓ | ✓ | ✓ | H | |||||||
| 2015 | [133] | ✓ | ✓ | ✓ | ✓ | ✓ | ✓ | B | |||||||||
| 2015 | [78] | ✓ | ✓ | ✓ | ✓ | ✓ | ✓ | H | |||||||||
| 2015 | [79] | ✓ | ✓ | ✓ | ✓ | ✓ | H | ||||||||||
| 2015 | [93] | ✓ | ✓ | H | |||||||||||||
| 2015 | [80] | ✓ | ✓ | ✓ | ✓ | ✓ | H | ||||||||||
| 2015 | [134] | ✓ | ✓ | ✓ | ✓ | ✓ | ✓ | E | |||||||||
| 2015 | [135] | ✓ | ✓ | ✓ | ✓ | ✓ | ✓ | ✓ | H | ||||||||
| 2015 | [81] | ✓ | ✓ | ✓ | ✓ | ✓ | ✓ | H | |||||||||
| 2015 | [136] | ✓ | ✓ | ✓ | ✓ | ✓ | ✓ | ✓ | H, B | ||||||||
| 2015 | [137] | ✓ | ✓ | ✓ | ✓ | ✓ | H | ||||||||||
| 2016 | [138] | ✓ | ✓ | ✓ | ✓ | ✓ | H | ||||||||||
| 2016 | [139] | ✓ | ✓ | ✓ | ✓ | H | |||||||||||
| 2016 | [82] | ✓ | ✓ | ✓ | ✓ | ✓ | G | ||||||||||
| Year | Multipath Routing Protocol | HM | HT | LA | Path Discovery | Path Selection/Load Distribution | Optimization Approach | |||||||||
|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|
| RE | HC | RSS/TP | Hop-Distance | Others | RE | HC | TE | Rate | Hop-Distance | Others | ||||||
| 2000 | [143] | ✓ | ✓ | ✓ | ✓ | ✓ | ✓ | H | ||||||||
| 2002 | [144] | ✓ | ✓ | ✓ | ✓ | ✓ | H | |||||||||
| 2004 | [145] | ✓ | ✓ | ✓ | ✓ | ✓ | ✓ | H | ||||||||
| 2007 | [146] | ✓ | ✓ | ✓ | ✓ | ✓ | ✓ | ✓ | H | |||||||
| 2007 | [147] | ✓ | ✓ | ✓ | ✓ | ✓ | H | |||||||||
| 2007 | [148] | ✓ | ✓ | ✓ | ✓ | ✓ | H | |||||||||
| 2008 | [149] | ✓ | ✓ | ✓ | ✓ | ✓ | ✓ | H | ||||||||
| 2008 | [150] | ✓ | ✓ | ✓ | ✓ | H | ||||||||||
| 2010 | [151] | ✓ | ✓ | ✓ | ✓ | ✓ | H | |||||||||
| 2011 | [152] | ✓ | ✓ | ✓ | ✓ | ✓ | ✓ | ✓ | ✓ | H | ||||||
| 2012 | [153] | ✓ | ✓ | ✓ | ✓ | ✓ | H | |||||||||
| 2012 | [154] | ✓ | ✓ | ✓ | H | |||||||||||
| 2014 | [155] | ✓ | ✓ | ✓ | ✓ | ✓ | ✓ | H | ||||||||
| 2014 | [156] | ✓ | ✓ | ✓ | ✓ | ✓ | ✓ | H | ||||||||
| 2015 | [157] | ✓ | ✓ | ✓ | ✓ | ✓ | H | |||||||||
| 2015 | [158] | ✓ | ✓ | ✓ | ✓ | ✓ | ✓ | H | ||||||||
| Year | Single-Path Routing Protocol | HM | HT | LA | Single-Path Load Distribution (Decision Variables) | Optimization Approach | ||||||
|---|---|---|---|---|---|---|---|---|---|---|---|---|
| RE | Hop-Distance | HC | TE | RSS/TP | Throughput | AE | ||||||
| 2001 | [171] | ✓ | ✓ | H | ||||||||
| 2002 | [166] | ✓ | ✓ | ✓ | ✓ | H | ||||||
| 2003 | [174] | ✓ | ✓ | ✓ | H | |||||||
| 2005 | [175] | ✓ | ✓ | ✓ | B | |||||||
| 2006 | [176] | ✓ | ✓ | ✓ | ✓ | H | ||||||
| 2007 | [177] | ✓ | ✓ | ✓ | H | |||||||
| 2007 | [178] | ✓ | ✓ | ✓ | ✓ | ✓ | H | |||||
| 2008 | [168] | ✓ | ✓ | ✓ | ✓ | H | ||||||
| 2009 | [169] | ✓ | ✓ | ✓ | ✓ | ✓ | H | |||||
| 2009 | [179] | ✓ | ✓ | ✓ | ✓ | H | ||||||
| 2009 | [180] | ✓ | ✓ | ✓ | ✓ | H | ||||||
| 2010 | [172] | ✓ | ✓ | ✓ | H | |||||||
| 2010 | [181] | ✓ | ✓ | ✓ | H | |||||||
| 2011 | [182] | ✓ | ✓ | ✓ | H | |||||||
| 2011 | [183] | ✓ | ✓ | ✓ | H | |||||||
| 2011 | [170] | ✓ | ✓ | ✓ | ✓ | H | ||||||
| 2013 | [184] | ✓ | ✓ | H | ||||||||
| 2013 | [185] | ✓ | ✓ | ✓ | H | |||||||
| 2014 | [167] | ✓ | ✓ | ✓ | H | |||||||
| 2015 | [186] | ✓ | ✓ | H | ||||||||
| 2016 | [173] | ✓ | ✓ | H | ||||||||
| Year | Clustering Routing Protocol | HM | HT | CH Rotation | Decision Variables (CH Selection) | LA | Decision Variables (Cluster Formation) | Cluster Size | Optimization Approach | |||||||
|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|
| RE | Distance | AE | RSS/TP | Predefined | RE | Distance | RSS/TP | Equal | Unequal | |||||||
| 2002 | [50] | ✓ | ✓ | ✓ | ✓ | ✓ | H | |||||||||
| 2005 | [187] | ✓ | ✓ | ✓ | ✓ | ✓ | ✓ | H | ||||||||
| 2005 | [188] | ✓ | ✓ | ✓ | ✓ | ✓ | H | |||||||||
| 2006 | [189] | ✓ | ✓ | ✓ | ✓ | ✓ | ✓ | H | ||||||||
| 2007 | [190] | ✓ | ✓ | ✓ | ✓ | ✓ | ✓ | H | ||||||||
| 2008 | [191] | ✓ | ✓ | ✓ | ✓ | ✓ | ✓ | H | ||||||||
| 2008 | [192] | ✓ | ✓ | ✓ | ✓ | ✓ | H | |||||||||
| 2009 | [193] | ✓ | ✓ | ✓ | ✓ | ✓ | ✓ | H | ||||||||
| 2009 | [194] | ✓ | ✓ | ✓ | ✓ | ✓ | H | |||||||||
| 2011 | [195] | ✓ | ✓ | ✓ | ✓ | ✓ | ✓ | ✓ | H | |||||||
| 2011 | [196] | ✓ | ✓ | ✓ | ✓ | ✓ | ✓ | ✓ | E | |||||||
| 2012 | [197] | ✓ | ✓ | ✓ | ✓ | ✓ | H | |||||||||
| 2012 | [198] | ✓ | ✓ | ✓ | ✓ | ✓ | H | |||||||||
| 2012 | [100] | ✓ | ✓ | ✓ | ✓ | ✓ | ✓ | H | ||||||||
| 2015 | [199] | ✓ | ✓ | ✓ | ✓ | ✓ | ✓ | ✓ | G | |||||||
| 2016 | [200] | ✓ | ✓ | ✓ | ✓ | ✓ | ✓ | H | ||||||||
© 2017 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Ogundile, O.O.; Alfa, A.S. A Survey on an Energy-Efficient and Energy-Balanced Routing Protocol for Wireless Sensor Networks. Sensors 2017, 17, 1084. https://doi.org/10.3390/s17051084
Ogundile OO, Alfa AS. A Survey on an Energy-Efficient and Energy-Balanced Routing Protocol for Wireless Sensor Networks. Sensors. 2017; 17(5):1084. https://doi.org/10.3390/s17051084
Chicago/Turabian StyleOgundile, Olayinka O., and Attahiru S. Alfa. 2017. "A Survey on an Energy-Efficient and Energy-Balanced Routing Protocol for Wireless Sensor Networks" Sensors 17, no. 5: 1084. https://doi.org/10.3390/s17051084
APA StyleOgundile, O. O., & Alfa, A. S. (2017). A Survey on an Energy-Efficient and Energy-Balanced Routing Protocol for Wireless Sensor Networks. Sensors, 17(5), 1084. https://doi.org/10.3390/s17051084