
Natural Inspired Intelligent Visual Computing and Its Application to Viticulture

Abstract
:1. Introduction
2. Related Works
2.1. Visual Information Processing for Viticulture
2.1.1. Yield Estimation
2.1.2. Disease Detection
2.1.3. Automated Vineyard Monitoring and Management
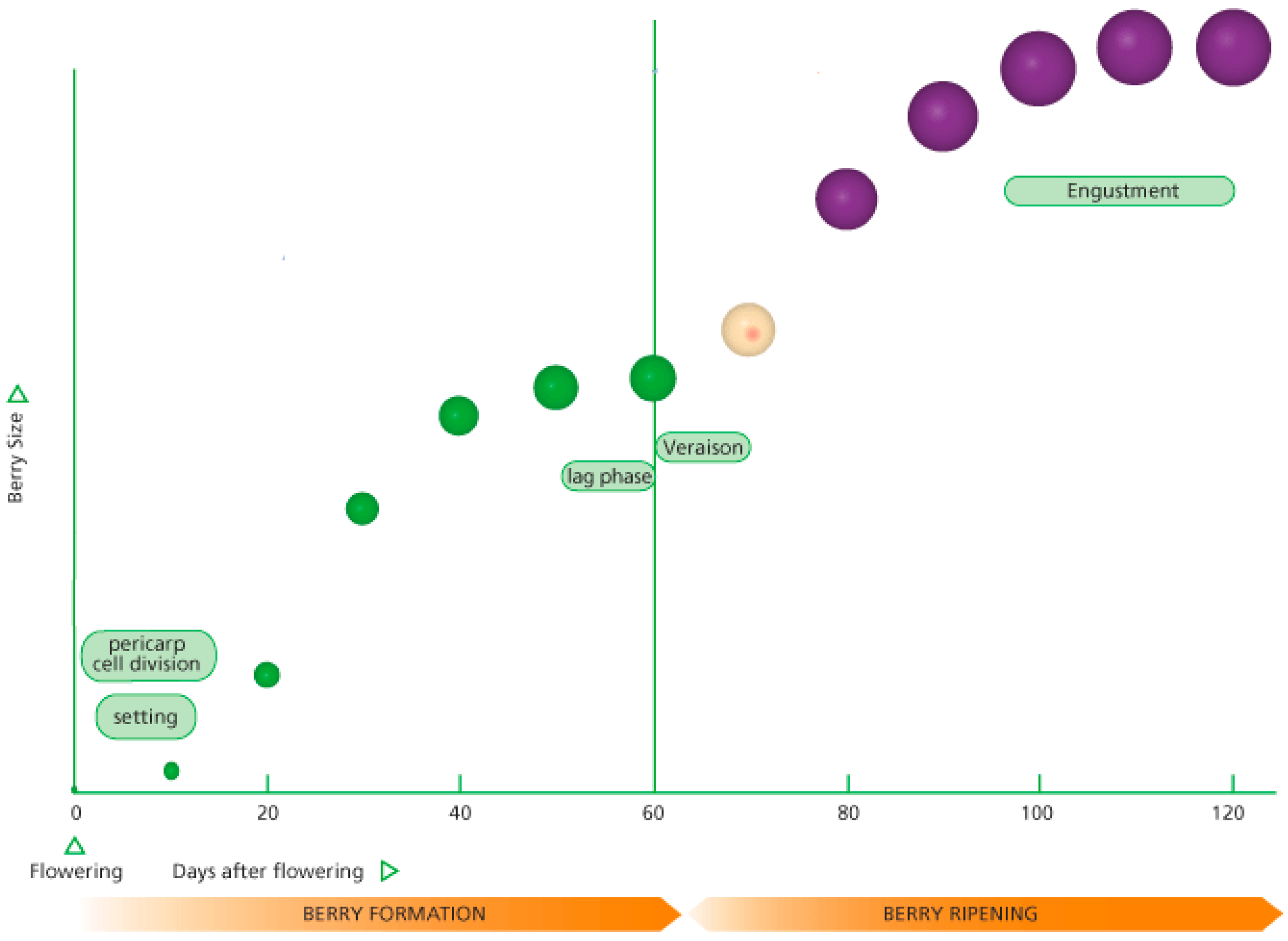
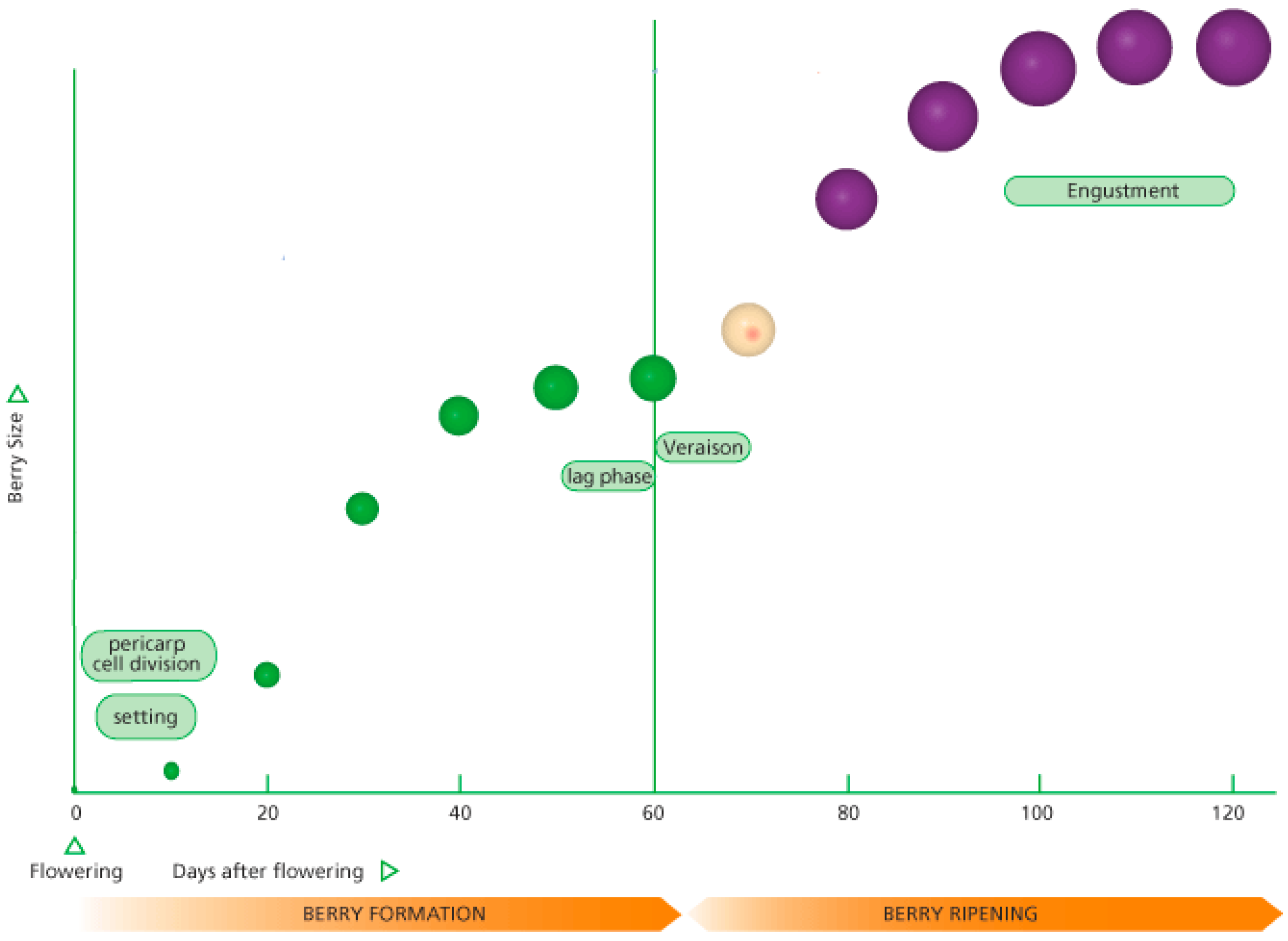
2.1.4. Grape Phenology
2.1.5. Smart Vineyards and Knowledge Engineering Approaches for Viticulture
2.2. AIS Models & Algorithms
2.2.1. Clonal Selection Algorithm
2.2.2. Definitions
- Antigen: optimization problem and its constraints (multiple arc detection from edge map).
- Antibody: candidate solutions (arc candidates).
- Affinity: objective function measurement for an antibody (arc matching with points on edge map).
2.2.3. CSA Operators
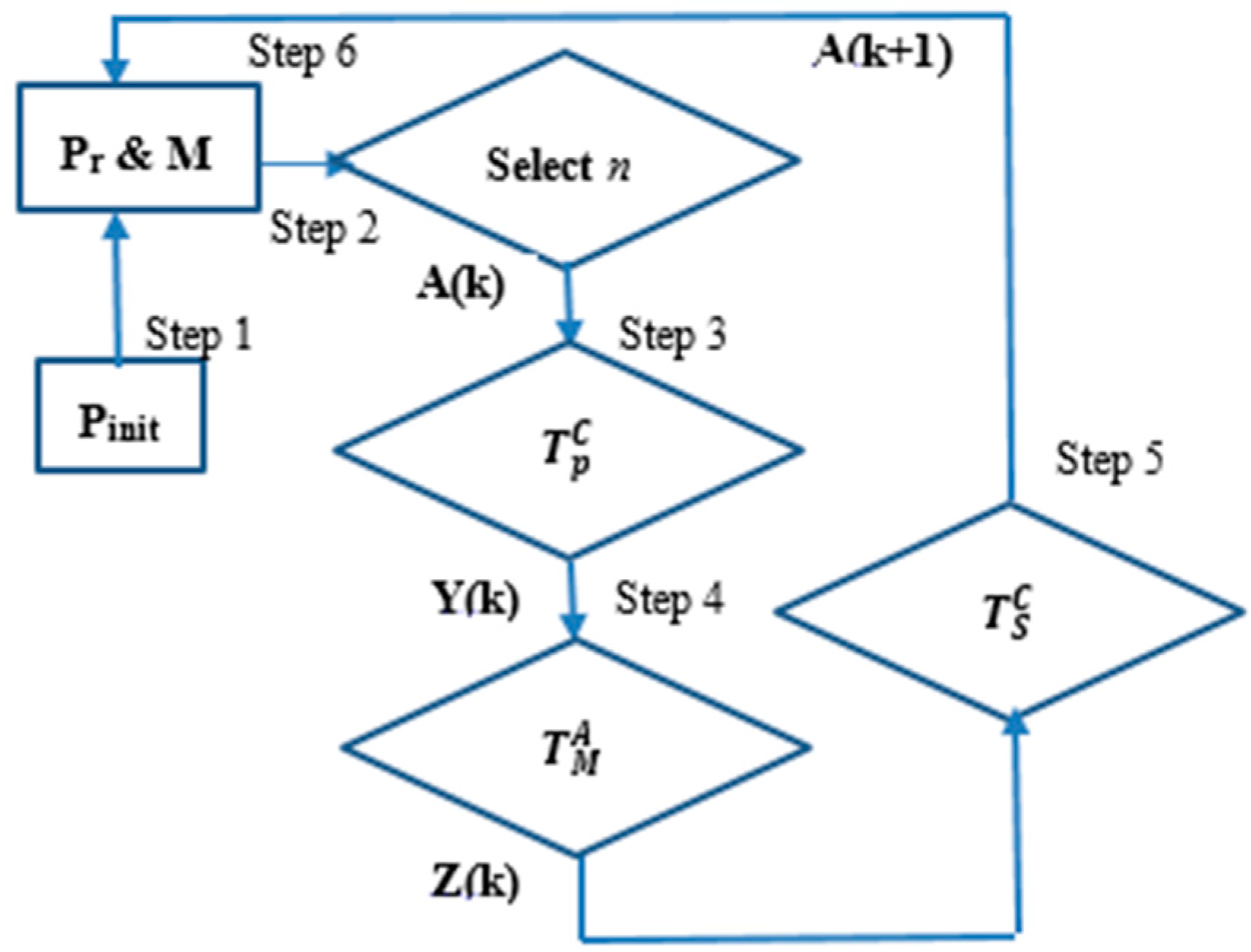
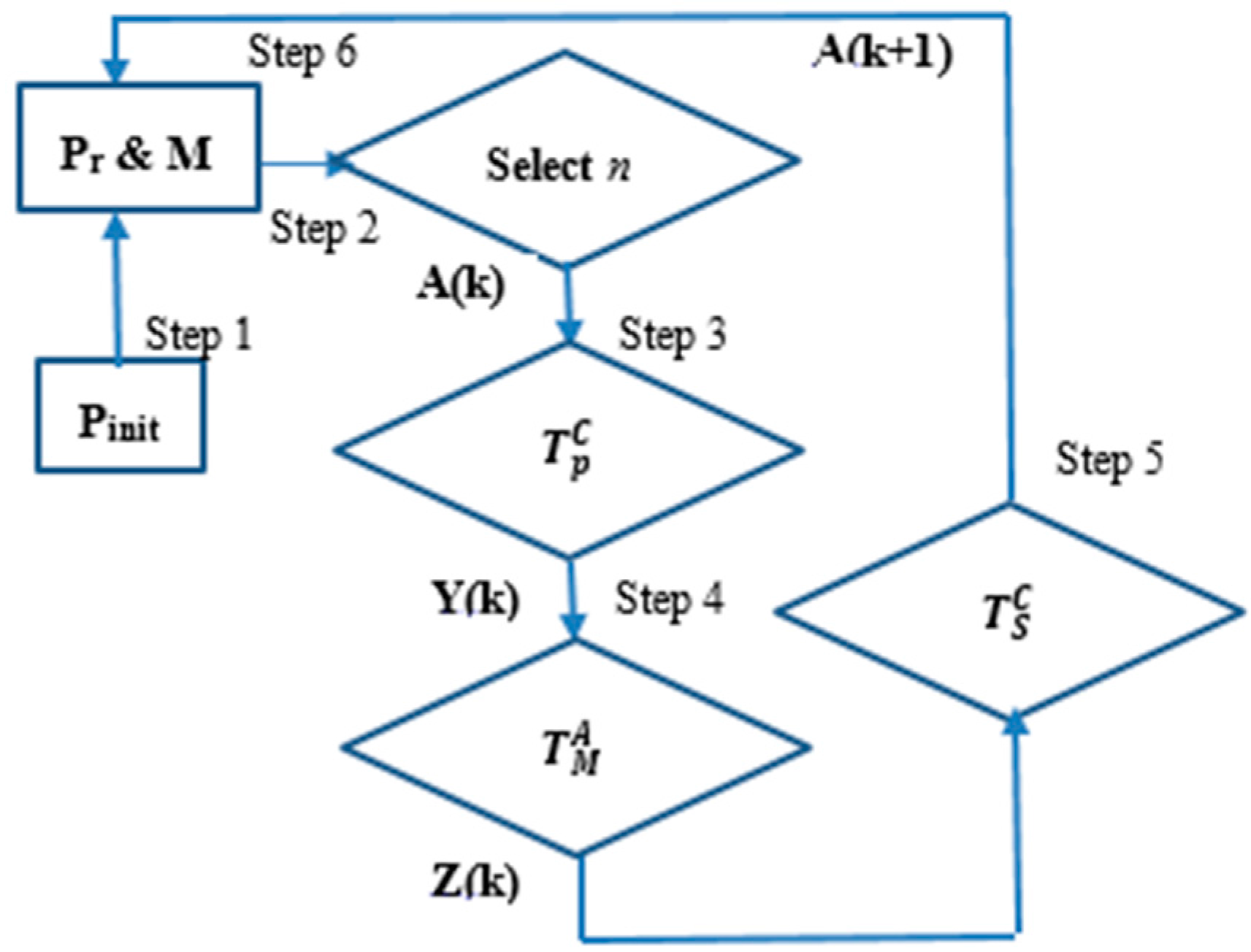
2.2.4. CSA Algorithm Steps
- Step 1:
- Initialize a random population (Pinit) and a set h = Pr + n of candidate solutions of subsets of memory cells (M) which is added to the remaining population (Pr). The total population is then given by PT = Pr + M where M denotes storage for the n memory cells.
- Step 2:
- Select the n best candidates of population PT in order to build A(k) based on affinity measure.
- Step 3:
- Reproduce () the population A(k) in proportion to affinity with respect to the antigen and generate a population of clones Y(k).
- Step 4:
- Mutate () the population Y(k) of clones based on affinity between antibody and the antigen following Equation (7).
- Step 5:
- Re-select () the best individuals from Z(k) and A(k) to give a new memory set M = A(k + 1).
- Step 6:
- Add random Pr antibodies to the new memory cells M to build PT.
- Step 7:
- Return to Step (2) if the finishing criterion has not been reached.
3. Multi-Arc Detection based on Artificial Immune System for Berry Images
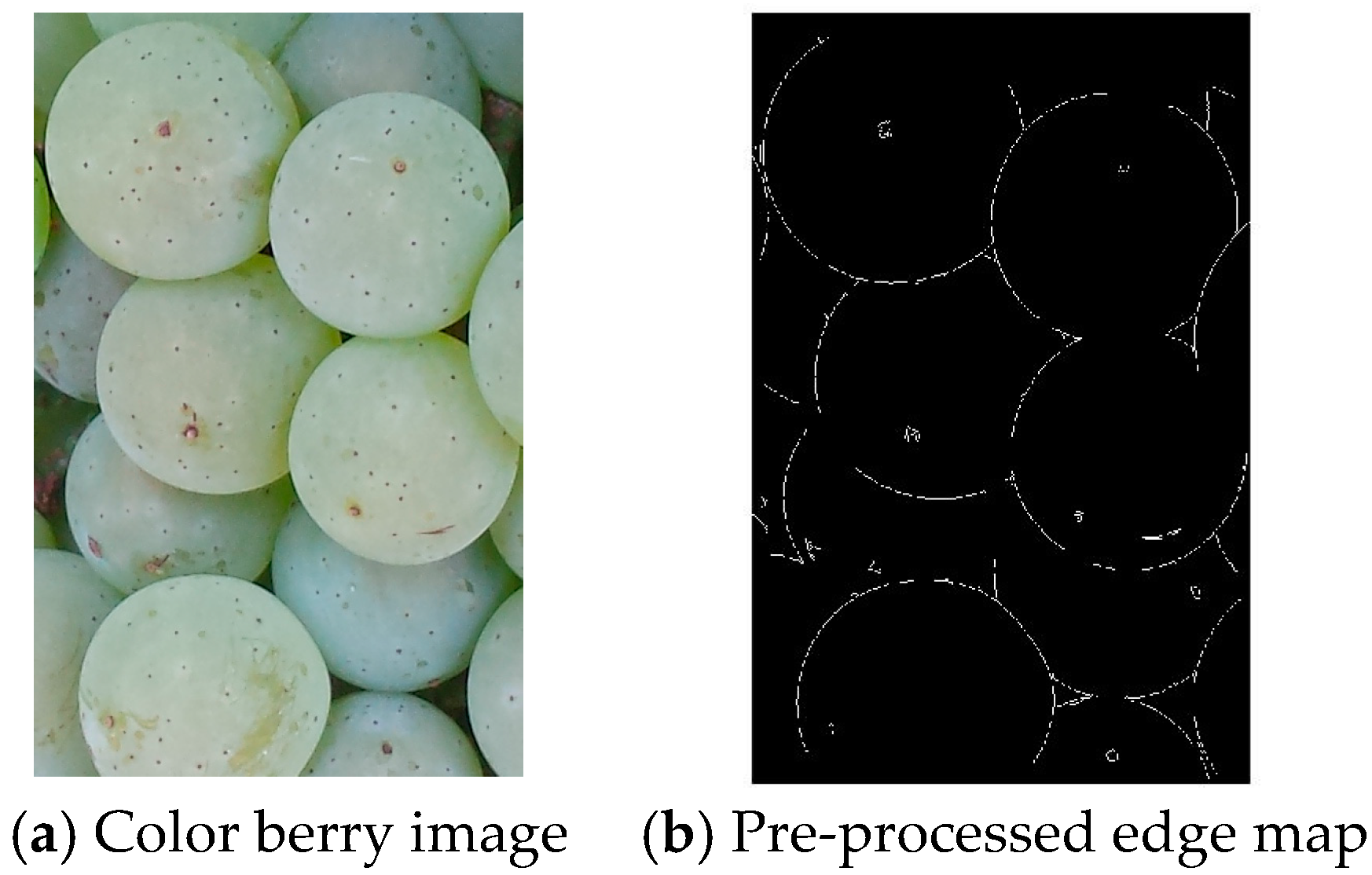
3.1. Pre-Processing
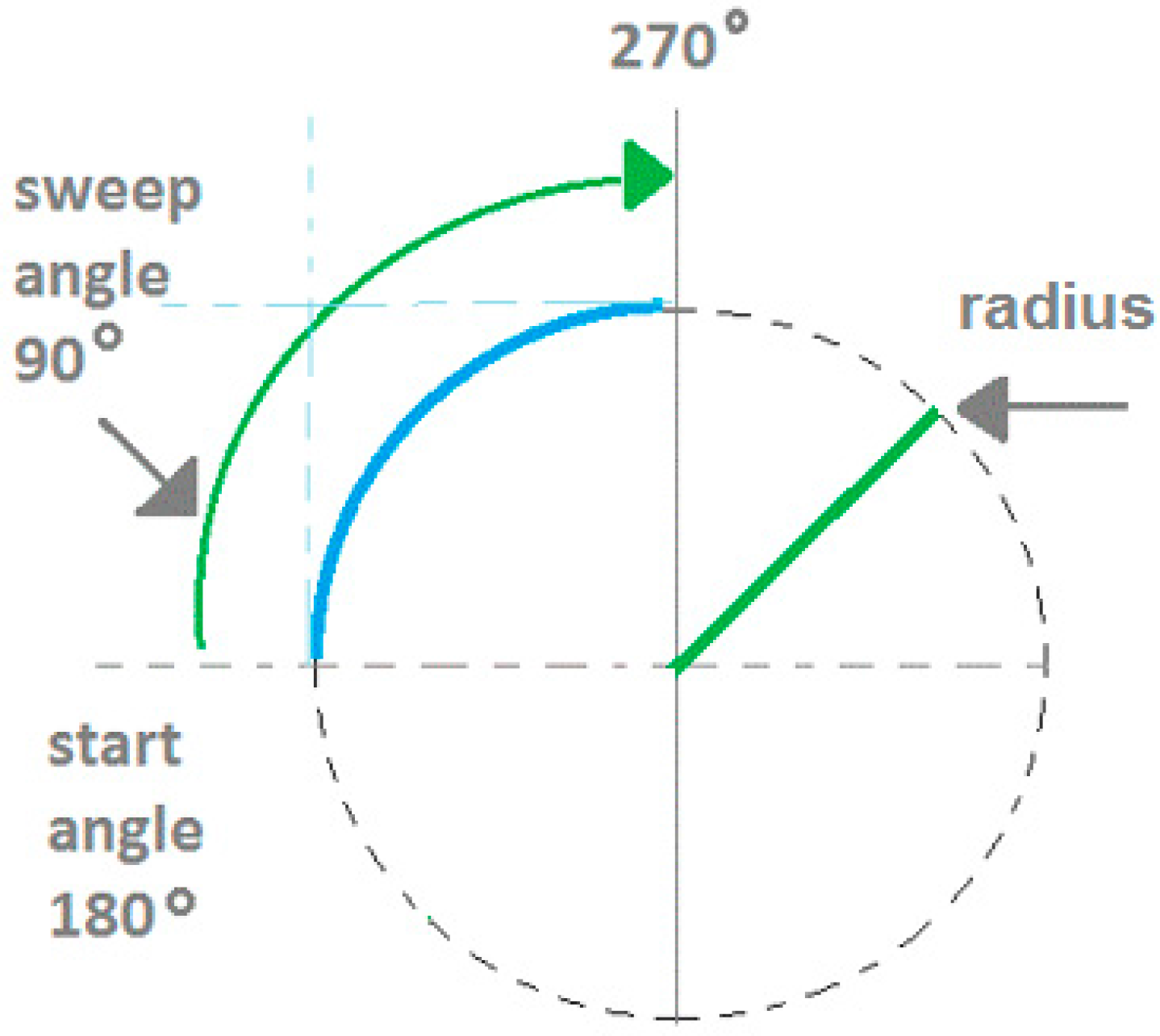
3.2. Real Value Arc Detection with Artificial Immune System
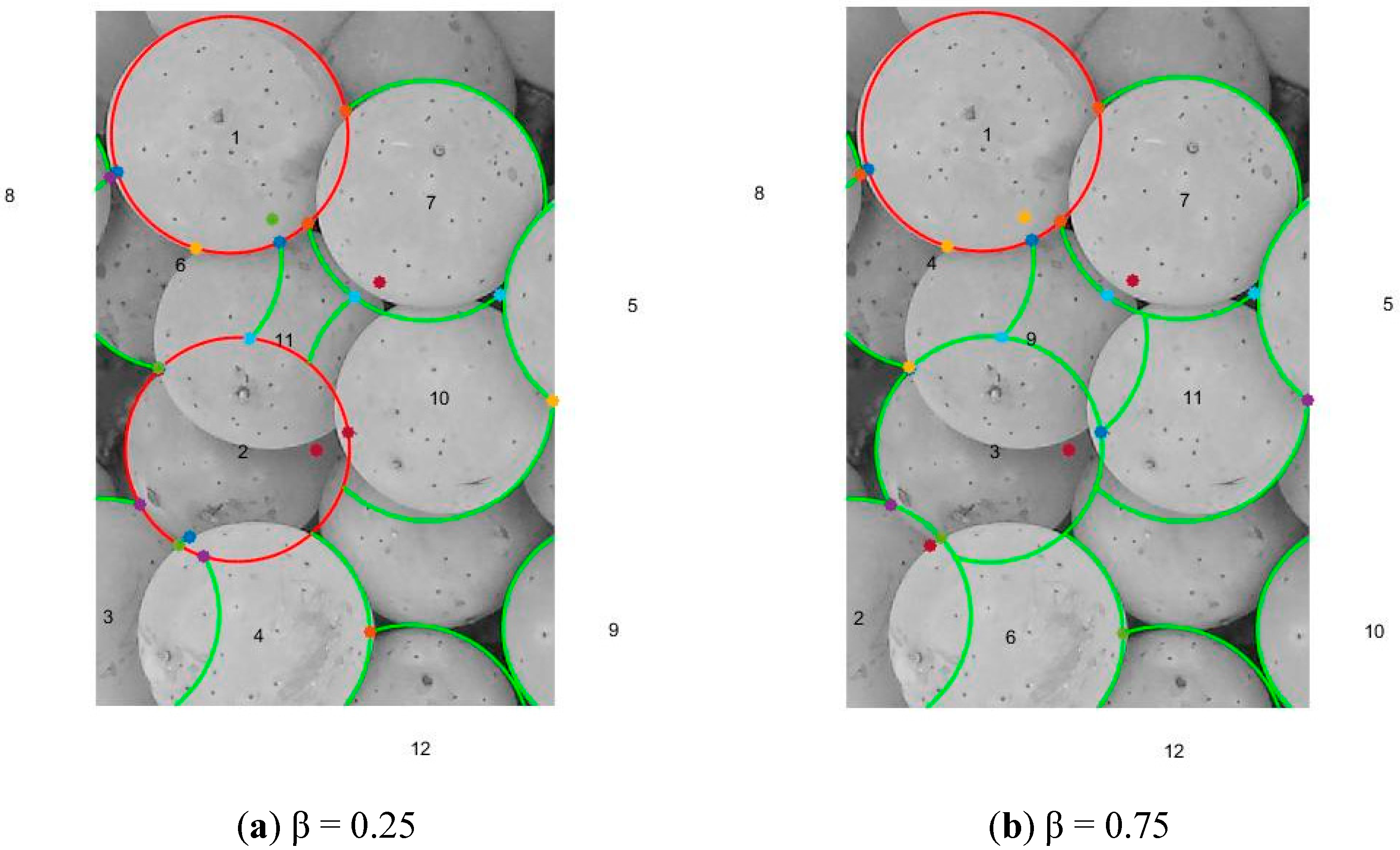
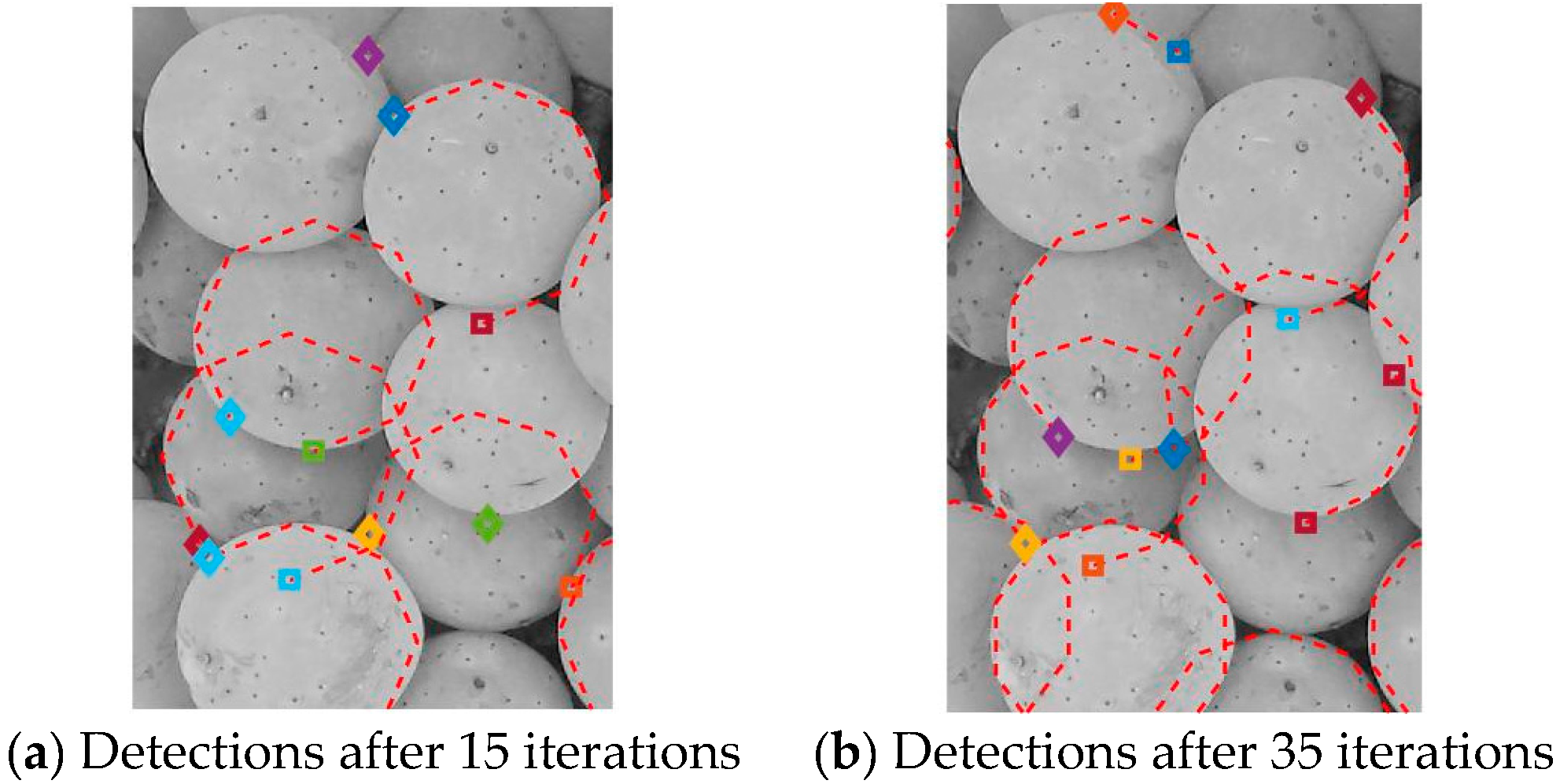
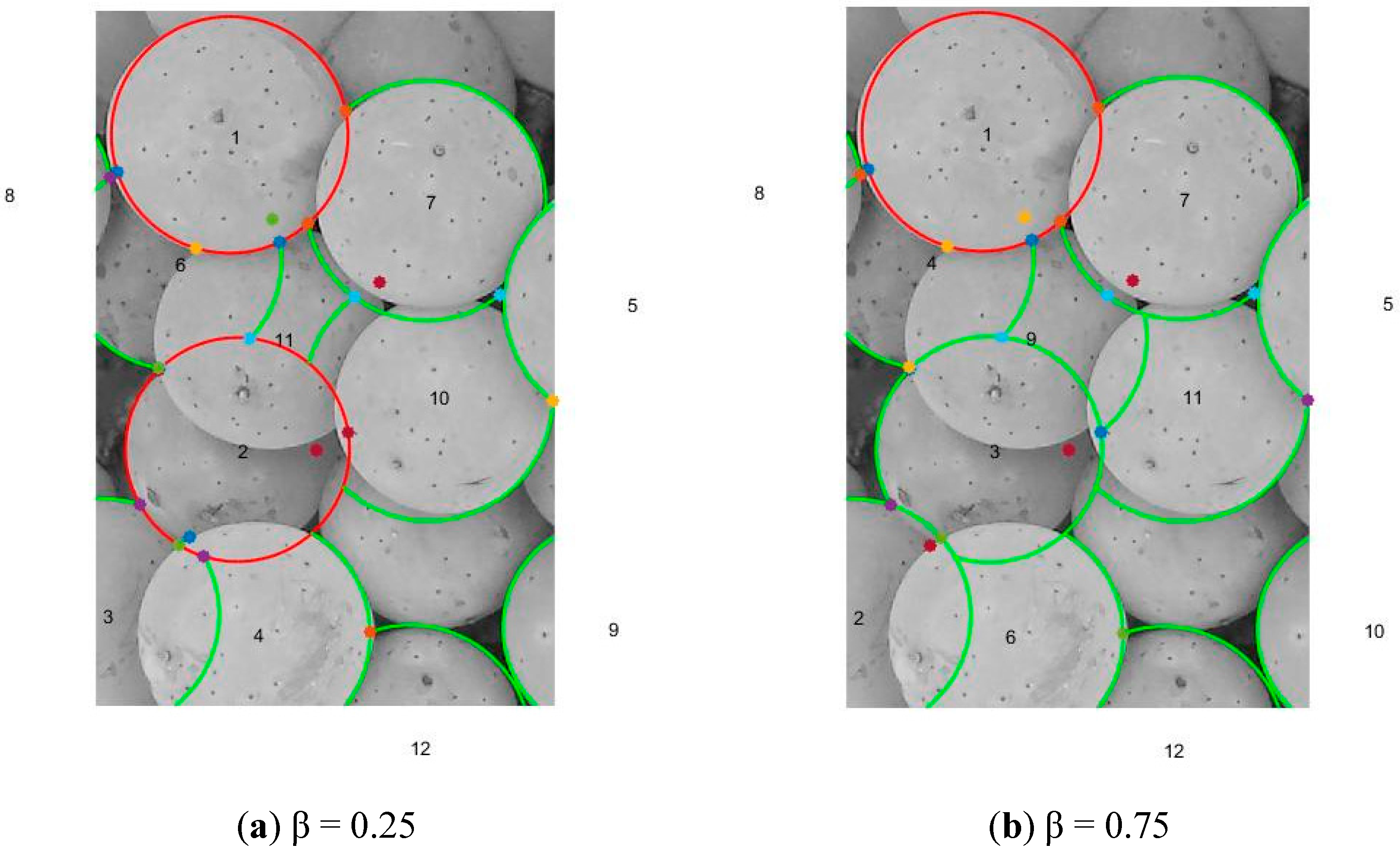
3.3. Arc Extension in Berry Images
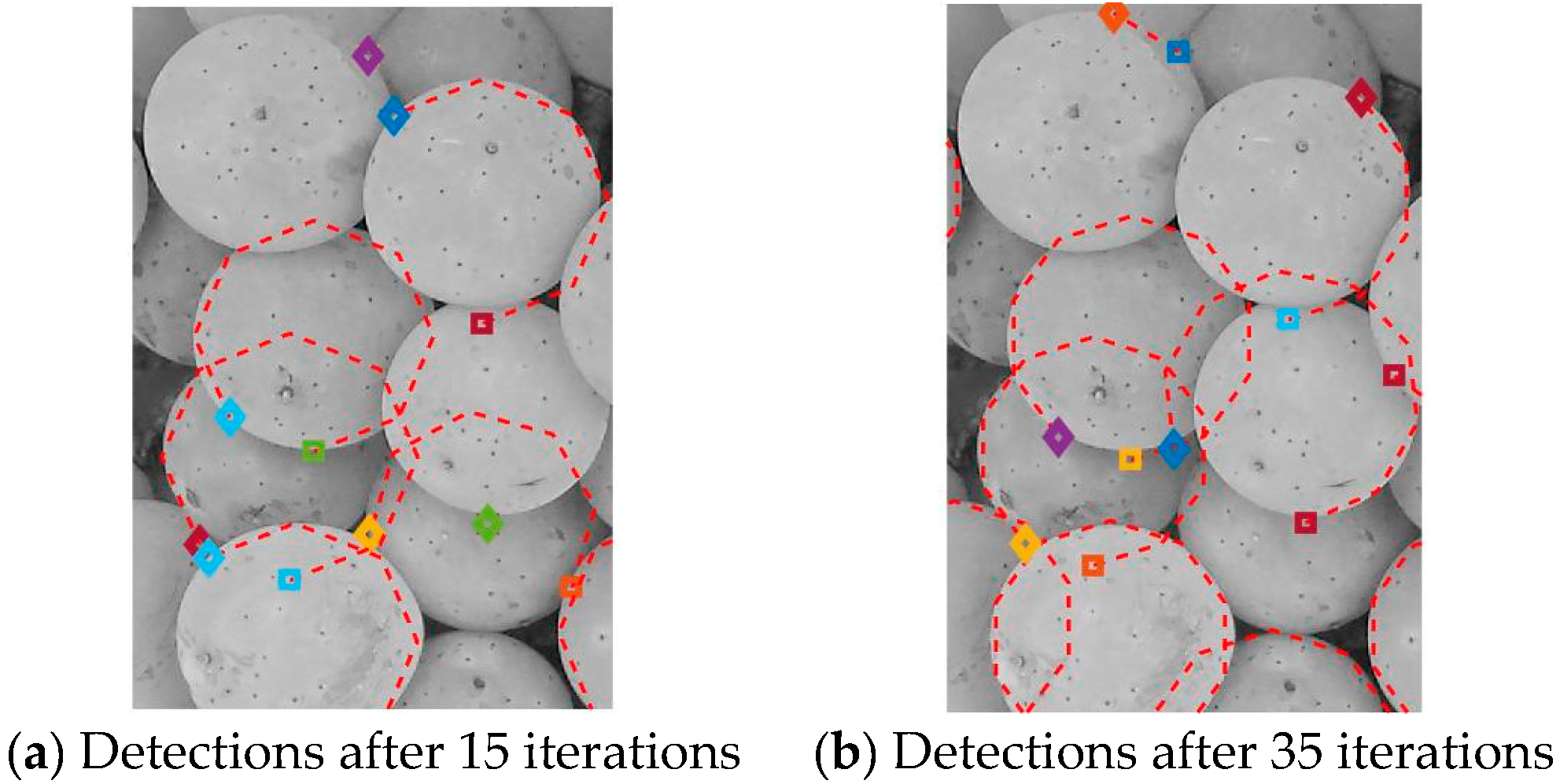
4. Experiments
5. Conclusions
Acknowledgments
Author Contributions
Conflicts of Interest
References
- Dasgupta, D. An overview of artificial immune systems. In Artificial Immune Systems and Their Applications; Dasgupta, D., Ed.; Springer: Berlin, Germany, 1998; pp. 3–19. [Google Scholar]
- Timmis, J. Artificial Immune Systems: A Novel Data Analysis Technique Inspired by the Immune Network Theory; University of Wales: Aberystwyth, UK, 2000. [Google Scholar]
- Dasgupta, D.; Ji, Z.; Gonzalez, F. Artificial immune system (AIS) research in the last five years. In Proceedings of the 2003 Congress on Evolutionary Computation, Canberra, Australia, 8–12 December 2004; Volume 1, pp. 123–130. [Google Scholar]
- Dasgupta, D. Advances in artificial immune systems. IEEE Comput. Intell. Mag. 2006, 1, 40–49. [Google Scholar] [CrossRef]
- Dasgupta, D.; Attoh-Okine, N. Immunity-based systems: A survey. In Proceedings of the 1997 IEEE International Conference on Systems, Man, and Cybernetics, Orlando, FL, USA, 12–15 October 1997; Volume 1, pp. 369–374. [Google Scholar]
- Wang, X.; Gao, X.Z.; Ovaska, S.J. Artificial immune optimization methods and applications—A survey. In Proceedings of the 2004 IEEE International Conference on Systems, Man and Cybernetics, The Hague, The Netherlands, 10–13 October 2004; Volume 4, pp. 3415–3420. [Google Scholar]
- Coombe, B.G.; McCarthy, M.G. Dynamics of grape berry growth and physiology of ripening. Aust. J. Grape Wine Res. 2000, 6, 131–135. [Google Scholar] [CrossRef]
- Keller, M. The Science of Grapevines; Academic Press: Cambridge, MA, USA, 2010. [Google Scholar]
- Yang, H.; Li, T.; Hu, X.; Wang, F.; Zou, Y. A survey of artificial immune system based intrusion detection. Sci. World J. 2014, 2014, 1–11. [Google Scholar] [CrossRef] [PubMed]
- Duda, R.O.; Hart, P.E. Use of the Hough transform to detect lines and curves in pictures. Commun. ACM 1972, 15, 11–15. [Google Scholar] [CrossRef]
- Nuske, S.; Achar, S.; Bates, T.; Narasimhan, S.; Singh, S. Yield estimation in vineyards by visual grape detection. In Proceedings of the IEEE/RSJ International Conference on Intelligent Robots and Systems, San Francisco, CA, USA, 5 December 2011. [Google Scholar]
- Font, D.; Tresanchez, M.; Martinez, D.; Moreno, J.; Clotet, E.; Palacin, J. Vineyard yield estimation based on the analysis of high resolution images obtained with artificial illumination at night. Sensors 2015, 15, 8284–8301. [Google Scholar] [CrossRef] [PubMed]
- Dunn, G.M.; Martin, S.R. Yield prediction from digital image analysis: A technique with potential for vineyard assessments prior to harvest. Aust. J. Grape Wine Res. 2004, 10, 196–198. [Google Scholar] [CrossRef]
- Liu, S.; Whitty, M.; Cossell, S. Automatic grape bunch detection in vineyards for precise yield estimation. In Proceedings of the International Conference on Machine Vision Applications, Tokyo, Japan, 18–22 May 2015. [Google Scholar]
- Stummer, B.E.; Francis, I.L.; Zanker, T.; Lattey, K.A.; Scott, E.S. Effects of powdery mildew on the sensory properties and composition of Chardonnay juice and wine when grape sugar ripeness is standardized. Aust. J. Grape Wine Res. 2005, 11, 66–76. [Google Scholar] [CrossRef]
- Hill, G.N.; Beresford, R.M; Evans, K.J. Tools for accurate assessment of botrytis bunch rot (Botrytis cinerea) on wine grapes. N. Z. Plant Prot. 2010, 63, 174–181. [Google Scholar]
- Weizheng, S.; Yachun, W.; Zhanliang, C.; Hongda, W. Grading method of leaf spot disease based on image processing. In Proceedings of the 2008 international Conference on Computer Science and Software Engineering, Wuhan, China, 12–14 December 2008; Volume 6, pp. 491–494. [Google Scholar]
- Padol, P.B.; Yadav, A.A. SVM Classifier Based Grape Leaf Disease Detection. In Proceedings of the Conference on Advances in Signal Processing, Pune, India, 9–11 June 2016; pp. 175–179. [Google Scholar]
- Waghmare, H.; Kokare, R.; Dandawate, Y. Detection and Classification of Diseases of Grape Plant Using Opposite Colour Local Binary Pattern Feature and Machine Learning for Automated Decision Support System. In Proceedings of the 2016 3rd International Conference on Signal Processing and Integrated Networks (SPIN), Noida, India, 11–12 February 2016; pp. 513–518. [Google Scholar]
- Lloret, J.; Bosch, I.; Sendra, S.; Serrano, A. A Wireless Sensor Network for Vineyard Monitoring That Uses Image Processing. Sensors 2011, 11, 6165–6196. [Google Scholar] [CrossRef] [PubMed]
- Lamb, D.W.; Weedon, M.M.; Bramley, R.G.V. Using remote sensing to predict grape phenolics and colour at harvest in a Cabernet Sauvignon vineyard: Timing observations against vine phenology and optimising image resolution. Aust. J. Grape Wine Res. 2004, 10, 46–54. [Google Scholar] [CrossRef]
- Klodt, M.; Herzog, K.; Töpfer, R.; Cremers, D. Field phenotyping of grapevine growth using dense stereo reconstruction. BMC Bioinform. 2015, 16, 1–11. [Google Scholar] [CrossRef] [PubMed]
- Rodriguez, F.J.; Gomez-Robledo, L.; Melgosa, M.; Gordillo, B.; Gonzalez-Miret, M.L.; Heredia, J. Ripeness Estimation of grape berries and seeds by image analysis. Comput. Electron. Agric. 2012, 82, 128–133. [Google Scholar] [CrossRef]
- Kicherer, A.; Herzog, K.; Pflanz, M.; Wieland, M.; Ruger, P.; Kecke, S.; Kuhlmann, H.; Topfer, R. An automated field phenotyping pipeline for application in grapevine research. Sensors 2015, 15, 4823–4836. [Google Scholar] [CrossRef] [PubMed]
- Kamsu-Foguem, B.; Flammang, A.; Tchuenté-Foguem, G. Knowledge engineering approach for the analysis of viticulture. Ecol. Inform. 2015, 30, 72–81. [Google Scholar] [CrossRef]
- Kamsu-Foguem, B.; Flammang, A. Knowledge description for the suitability requirements of different geographical regions for growing wine. Land Use Policy 2014, 38, 719–731. [Google Scholar] [CrossRef]
- Prevostini, M.; Taddeo, A.V.; Jermini, M.; Linder, C.; Petit, A. Monitoring Scaphoideus titanus and related in-field activities: The experience in Switzerland and France using PreDiVine DSS. In Proceedings of the IOBC-WPRS Conference of the Working Group on Integrated Protection and Production in Viticulture, Vienna, Austria, 20–23 October 2015; pp. 20–23. [Google Scholar]
- Farmer, J.D.; Packard, N.; Perelson, A. The immune system, adaptation and machine learning. Phys. D Nonlinear Phenom. 1986, 2, 187–204. [Google Scholar] [CrossRef]
- Bersini, H.; Varela, F.J. Hints for adaptive problem solving gleaned from immune networks. In Parallel Problem Solving from Nature; Springer: Berlin, Germany, 1990. [Google Scholar]
- Forrest, S.; Perelson, A.S.; Allen, L.; Cherukuri, R. Self-nonself discrimination in a computer. In Proceedings of the IEEE Symposium on Research in Security and Privacy, Oakland, CA, USA, 16–18 May 1994; pp. 202–212. [Google Scholar]
- Castro, L.N.D.; Zuben, F.J.V. The clonal selection algorithm with engineering applications. In Proceedings of the Genetic and Evolutionary Computation Conference (GECCO’00)—Workshop Proceedings, Las Vegas, NV, USA, 8–12 July 2000. [Google Scholar]
- Isa, N.; Sabri, N.M.; Jazahanim, K.S.; Taylor, N.K. Application of the clonal selection algorithm in artificial immune systems for shape recognition. In Proceedings of the 2010 International Conference on Information Retrieval & Knowledge Management, Shah Alam, Malaysia, 17–18 March 2010; pp. 223–228. [Google Scholar]
- Lu, D.; Yu, X.-H. Multi-circle detection for bladder cancer diagnosis based on artificial immune systems. In Proceedings of the 2013 International Joint Conference on Neural Networks (IJCNN), Dallas, TX, USA, 4–9 August 2013; pp. 1–7. [Google Scholar]
- Cuevas, E.; Osuna-Enciso, V.; Wario, F.; Zaldívar, D.; Pérez-Cisneros, M. Automatic multiple circle detection based on artificial immune systems. Expert Syst. Appl. 2012, 39, 713–722. [Google Scholar] [CrossRef]
- De Castro, L.N.; von Zuben, F.J. Learning and optimization using the clonal selection principle. IEEE Trans. Evol. Comput. 2002, 6, 239–251. [Google Scholar] [CrossRef]
- Cutello, V.; Narzisi, G.; Nicosia, G.; Pavone, M. Clonal selection algorithms: A comparative case study using effective mutation potentials. In International Conference on Artificial Immune Systems; Jacob, C., Pilat, M.L., Bentley, P.J., Timmis, J.I., Eds.; Springer: Berlin, Germany, 2005; Volume 3627, pp. 13–28. [Google Scholar]
- Tang, T.; Qiu, J. An improved multimodal artificial immune algorithm and its convergence analysis. In Proceedings of the Sixth World Congress on Intelligent Control and Automation, Dalian, China, 21–23 June 2006; pp. 3335–3339. [Google Scholar]
- Xu, X.; Zhang, J. An improved immune evolutionary algorithm for multimodal function optimization. In Proceedings of the Third International Conference on Natural Computation, Haikou, China, 24–27 August 2007; pp. 641–646. [Google Scholar]
- Roth, G.; Levine, M.D. Geometric primitive extraction using a genetic algorithm. IEEE Trans. Pattern Anal. Mach. Intell. 1994, 6, 901–905. [Google Scholar] [CrossRef]
- Rabatel, G.; Guizard, C. Grape berry calibration by computer vision using elliptical model fitting. In Precision Agriculture ’07; Wageningen Academic Publishers: Wageningen, The Netherlands, 2007; pp. 581–587. [Google Scholar]
- Du, C. Robust Parameter Free Circle Detector. Available online: https://github.com/Answeror/RPCD/blob/master/doc/final.pdf (accessed on 16 December 2016).
- Akinlar, C.; Topal, C. EDCircles: Real-time Circle Detection by Edge Drawing (ED). In Proceedings of the International Conference on Acoustics, Speech and Signal. Processing (ICAASP), Kyoto, Japan, 25–30 March 2012. [Google Scholar]


{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| CHT | RPCD [41] | Proposed AIS | |
|---|---|---|---|
| Sensitivity | 0.1627 | 0.1760 | 0.5880 |
| Precision | 0.9245 | 0.9464 | 0.8894 |
| Fscore | 0.2768 | 0.2969 | 0.7080 |
© 2017 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Ang, L.M.; Seng, K.P.; Ge, F.L. Natural Inspired Intelligent Visual Computing and Its Application to Viticulture. Sensors 2017, 17, 1186. https://doi.org/10.3390/s17061186
Ang LM, Seng KP, Ge FL. Natural Inspired Intelligent Visual Computing and Its Application to Viticulture. Sensors. 2017; 17(6):1186. https://doi.org/10.3390/s17061186
Chicago/Turabian StyleAng, Li Minn, Kah Phooi Seng, and Feng Lu Ge. 2017. "Natural Inspired Intelligent Visual Computing and Its Application to Viticulture" Sensors 17, no. 6: 1186. https://doi.org/10.3390/s17061186
APA StyleAng, L. M., Seng, K. P., & Ge, F. L. (2017). Natural Inspired Intelligent Visual Computing and Its Application to Viticulture. Sensors, 17(6), 1186. https://doi.org/10.3390/s17061186