
Improved Short-Term Clock Prediction Method for Real-Time Positioning

Abstract
:1. Introduction
2. Clock Prediction Methods
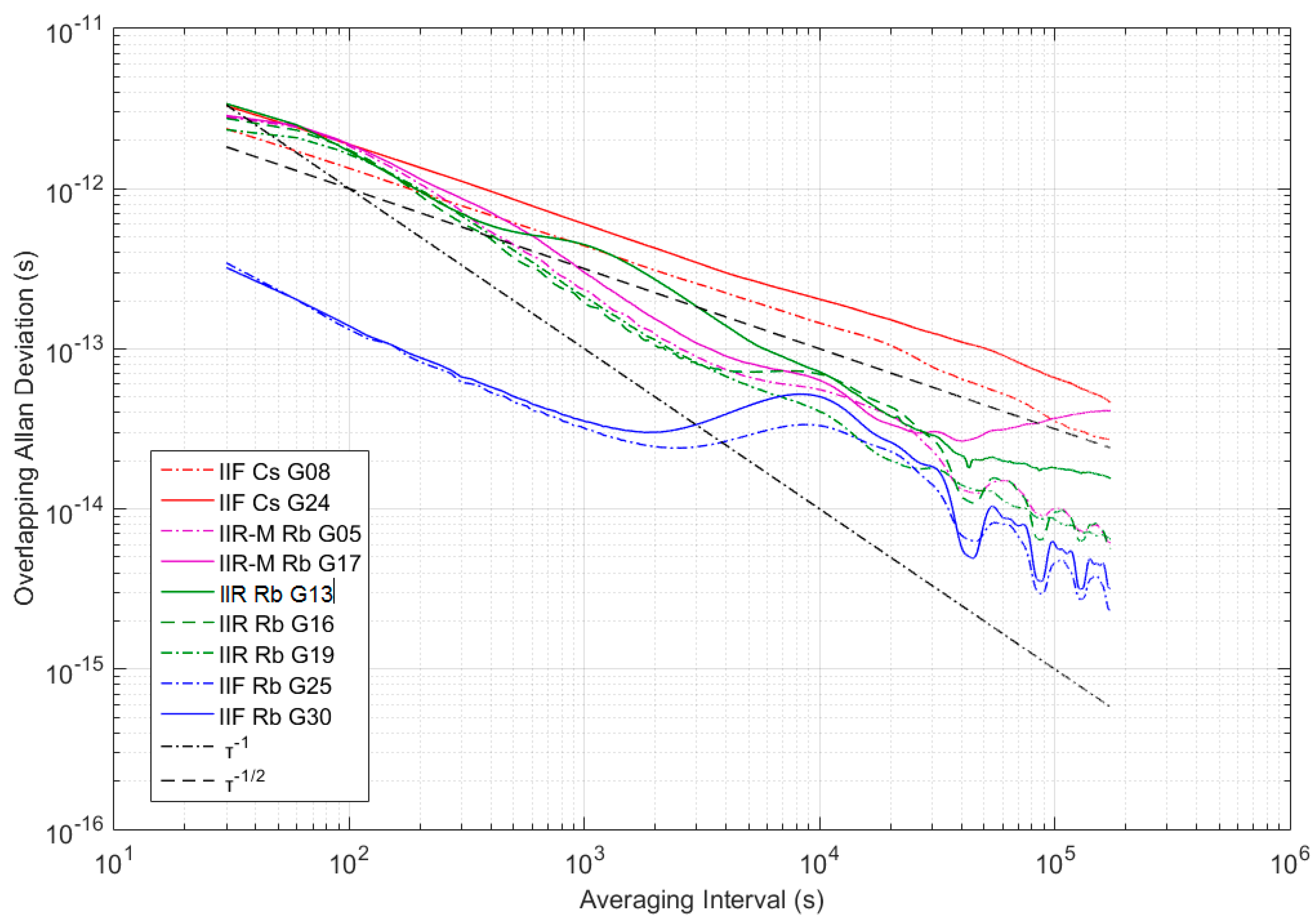
2.1. Stability of IGS On-Board Clock Corrections
2.2. Traditional Model
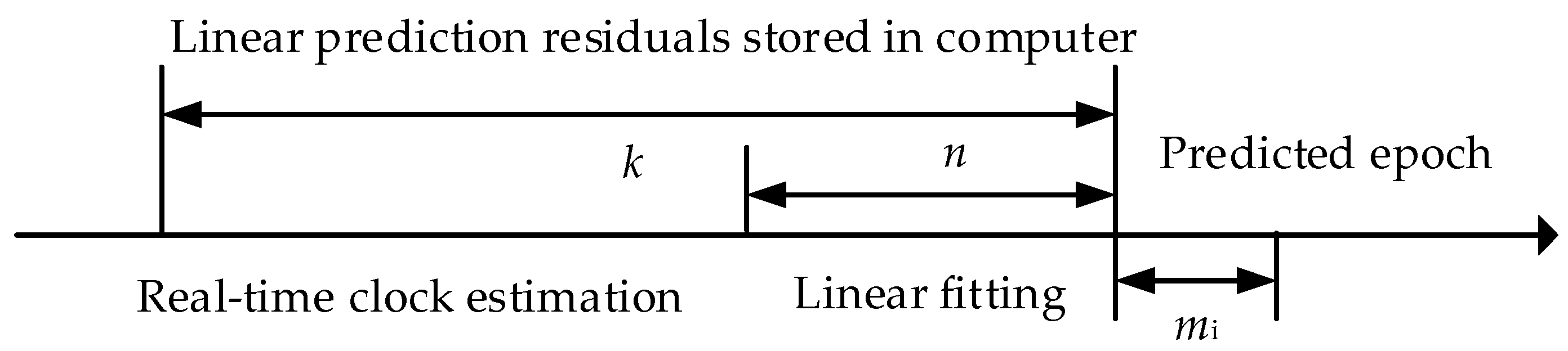
2.3. New Model for Short-Term Prediction
3. Experiment Results
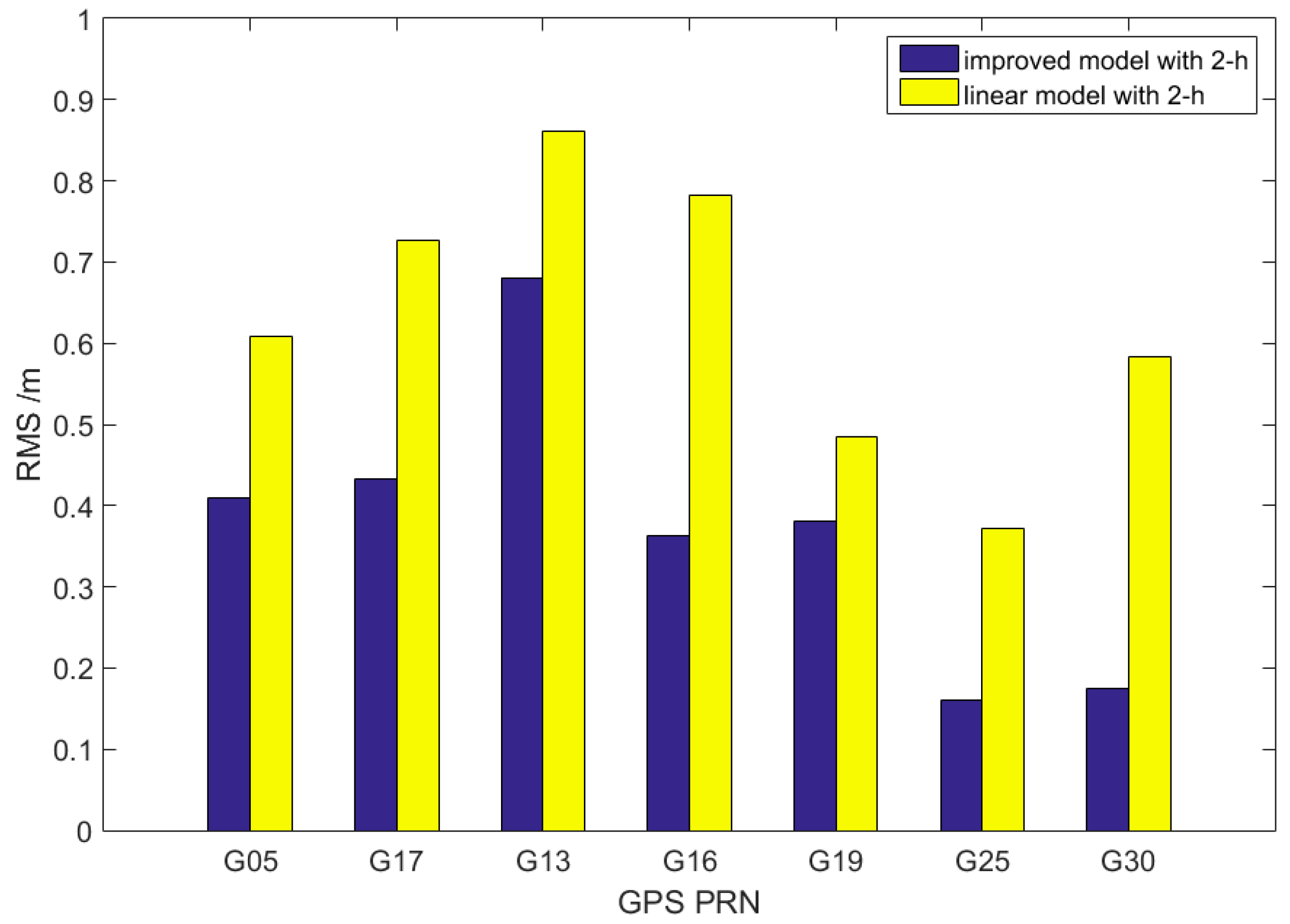
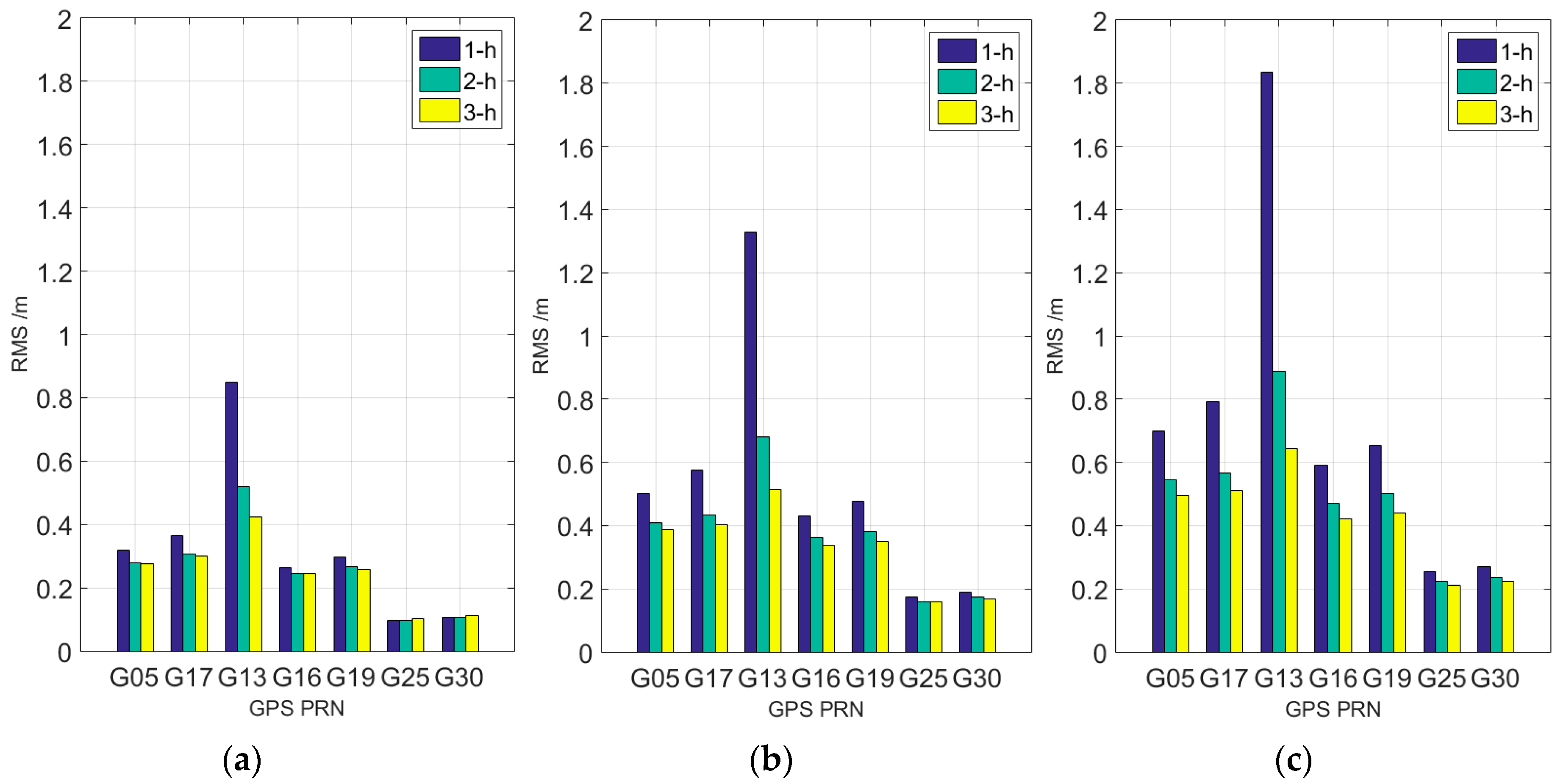
3.1. Accuracy Verification of Short-Term Clock Prediction
3.1.1. Experiment Using IGS Final Product
3.1.2. Comparison with IGU Product
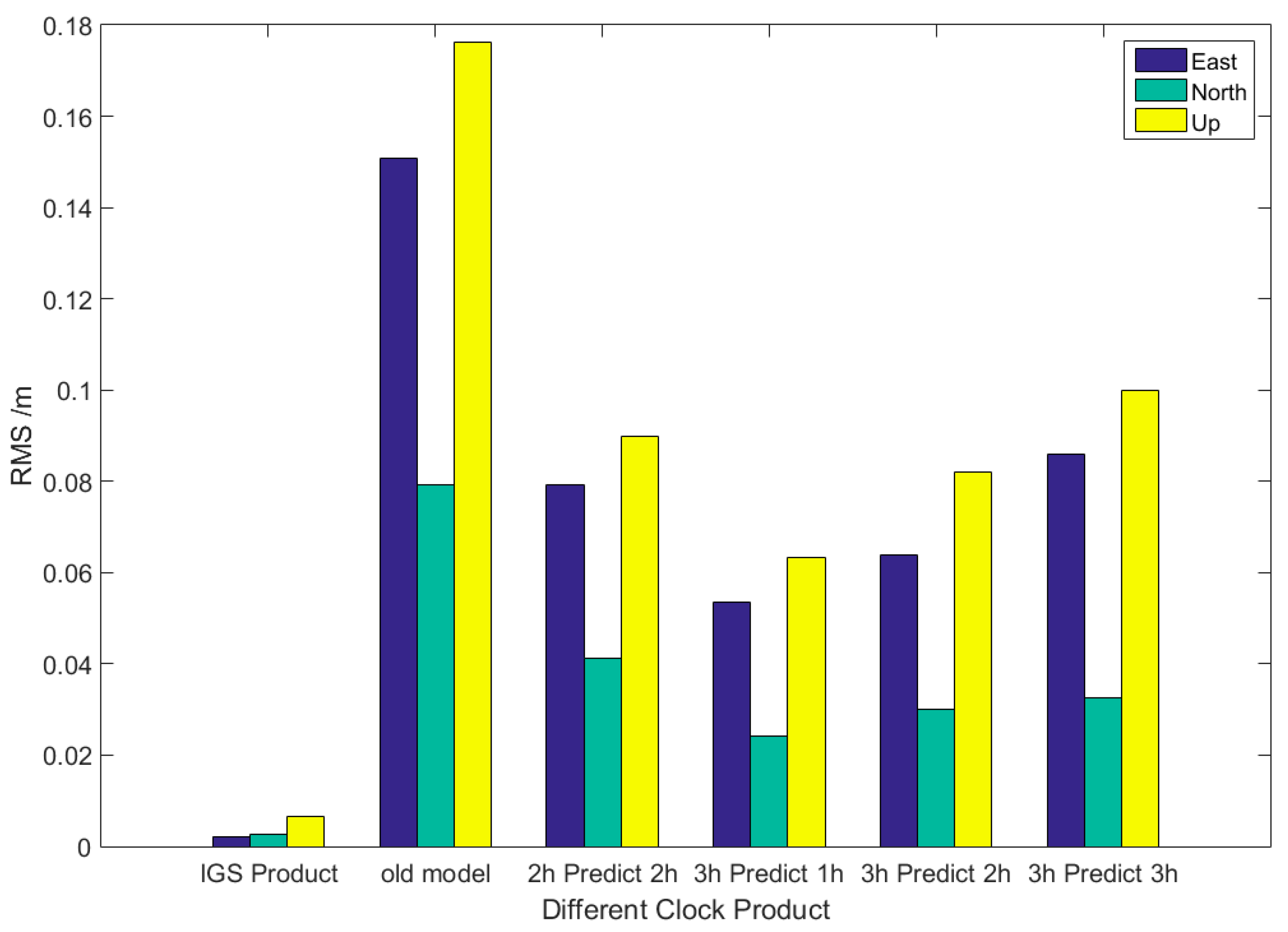
3.2. Experiment Using Real-Time Clock Production
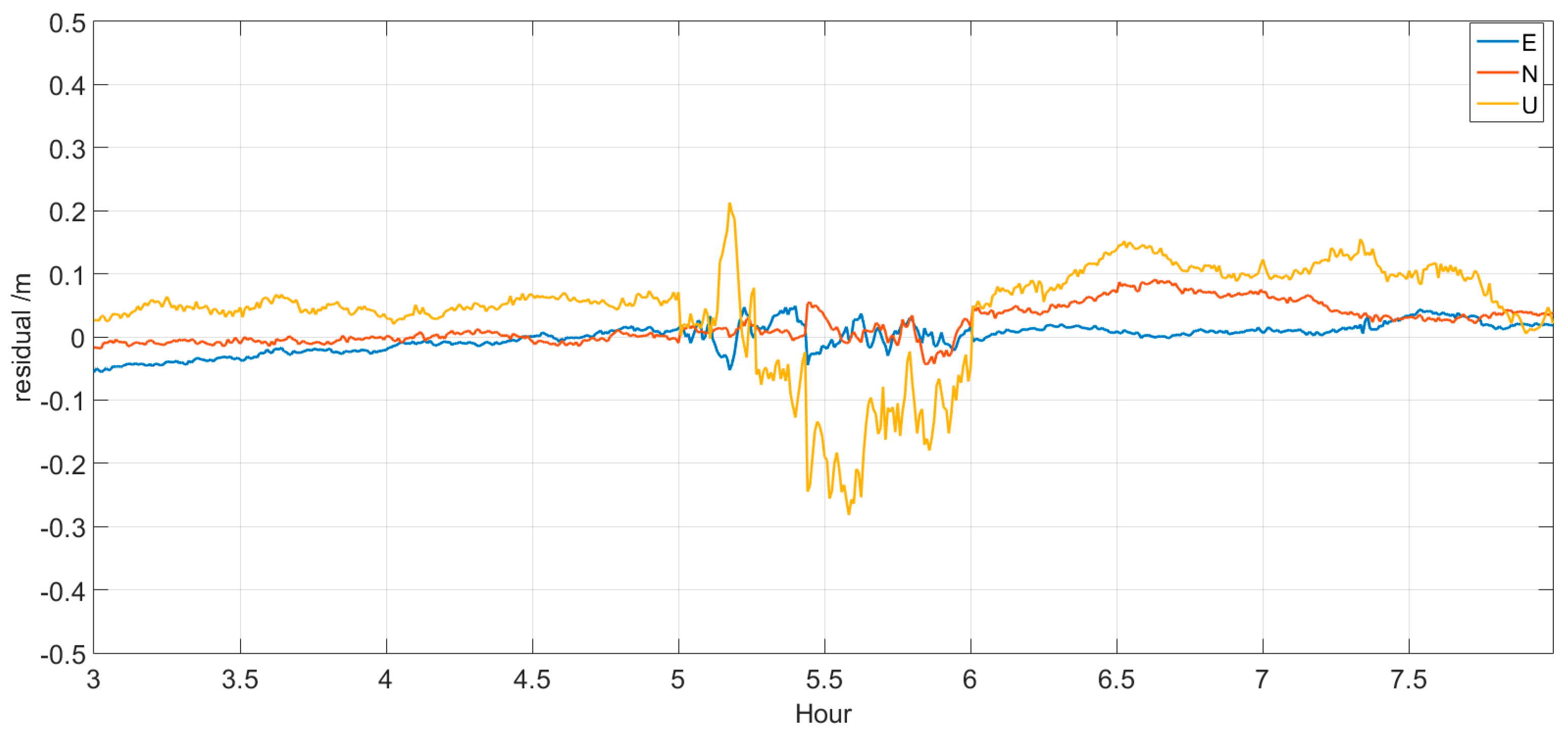
3.3. Accuracy Verification of the Static and Kinematic PPP
3.3.1. The Static PPP Tests
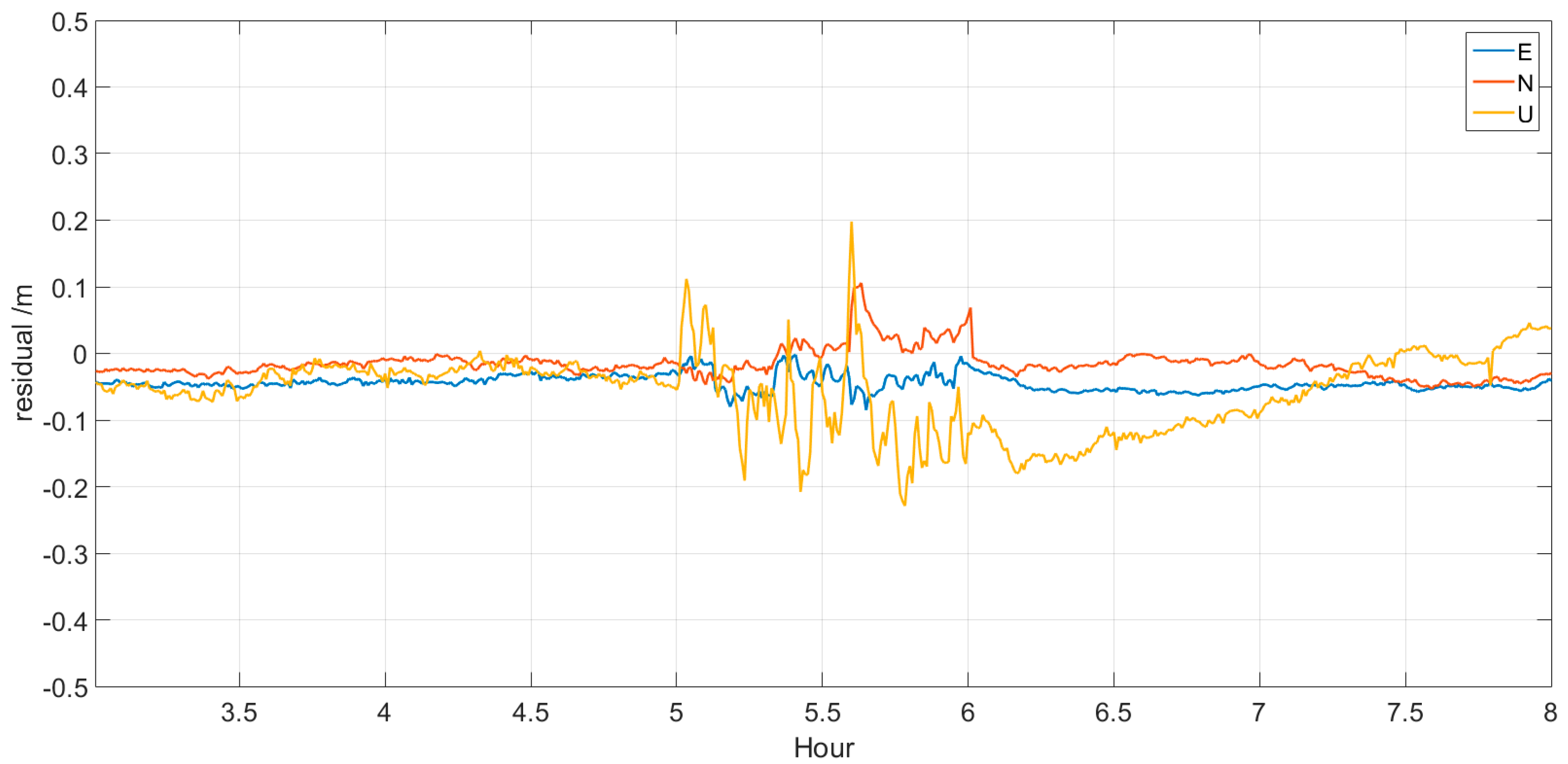
3.3.2. The Kinematic PPP Tests
4. Conclusions
Acknowledgments
Author Contributions
Conflicts of Interest
References
- Zumberge, J.F.; Heflin, M.B.; Jefferson, D.C.; Watkins, M.M. Precise point positioning for the efficient and robust analysis of GPS data from large networks. J. Geophys. Res. 1997, 102, 5005–5017. [Google Scholar] [CrossRef]
- Kouba, J. A Guide to Using International GNSS Service (IGS) Products; Geodetic Survey Division, Natural Resources Canada: Ottawa, ON, Canada, 2009.
- International GNSS Service Products. Available online: http://www.igs.org/products (accessed on 17 August 2016).
- Guo, F.; Zhang, X.; Li, X.; Cai, S. Impact of sampling rate of IGS satellite clock on precise point positioning. Geo-spat. Inf. Sci. 2010, 13, 150–156. [Google Scholar] [CrossRef]
- IGS Real-Time Service Fact Sheet. Available online: http://kb.igs.org/hc/en-us/articles/201087803-IGS-Real-Time-Service-Fact-Sheet (accessed on 17 August 2016).
- Steigenberger, P.; Montenbruck, O.; Hauschild, A. Short-term analysis of GNSS clocks. GPS Solut. 2013, 17, 295–307. [Google Scholar] [CrossRef]
- Griggs, E.; Kursinski, E.R.; Akos, D. Short-term GNSS satellite clock stability. Radio Sci. 2015, 50, 813. [Google Scholar] [CrossRef]
- Huang, G.W.; Zhang, Q.; Wang, J.G. Research on estimation and precision of GPS satellite clock error. J. Geod. Geodyn. 2009, 29, 118–122. [Google Scholar]
- Senior, K.; Ray, J.; Beard, R. Characterization of periodic variations in the GPS satellite clocks. GPS Solut. 2008, 12, 211–225. [Google Scholar] [CrossRef]
- Wang, Y.; Lu, Z.; Qu, Y.; Li, L.; Wang, N. Improving prediction performance of GPS satellite clock bias based on wavelet neural network. GPS Solut. 2016, 21, 523. [Google Scholar] [CrossRef]
- Zheng, Z.; Lu, X.; Chen, Y. Improved Grey Model and Application in Real-Time GPS Satellite Clock Bias Prediction (419–423). In Proceedings of the IEEE 2008 Fourth International Conference on Natural Computation, Jinan, China, 18–20 October 2008. [Google Scholar]
- Zhou, W.; Huang, C.; Song, S.; Chen, Q.; Liu, Z. Characteristic analysis and short-term prediction of GPS/BDS satellite clock correction. In Lecture Notes in Electrical Engineering, Proceedings of the China Satellite Navigation Conference (CSNC), Changsha, China, 18–20 May 2016; Sun, J., Liu, J., Fan, S., Wang, F., Eds.; Springer: Singapore, 2016; Volume III. [Google Scholar]
- Huang, G.W.; Zhang, Q.; Xu, G.C. Real-time clock correction prediction with an improved model. GPS Solut. 2013, 18, 95–104. [Google Scholar] [CrossRef]
- Lou, Y.D. Research on Real-Time Precise GPS Orbit and Clock Correction Determination; Wuhan University: Wuhan, China, 2008. [Google Scholar]
- Song, W.W. Research on Real-Time Clock Correction Determination and Real-time Precise Point Positioning; Wuhan University: Wuhan, China, 2011. [Google Scholar]
- Ahmed, N.; Rao, K.R. Fast Fourier Transform[M] Orthogonal Transforms for Digital Signal Processing; Springer: Berlin/Heidelberg, Germany, 1975; pp. 54–84. [Google Scholar]
- Riley, W.J. Handbook of Frequency Stability Analysis; NIST SP 1065; US Department of Commerce: Washington, DC, USA, 2007; pp. 1–123.
- US Air Force. NAVSTAR GPS Space Segment/Navigation User Interfaces; Interface Specification IS-GPS-200D; US Air Force: Washington, DC, USA, 2006.
- Senior, K.; Koppang, P.; Matsakis, D. Developing an IGS time scale. In Proceedings of the 2001 IEEE International Frequncy Control Symposium and PDA Exhibition (Cat. No. 01CH37218), Seattle, WA, USA, 8 June 2011. [Google Scholar]
- Figures and Statistics for Precise Point Positioning (PPP). Available online: http://www-app2.gfz-potsdam.de/pb1/igsacc/index_igsacc_ppp.html (accessed on 17 August 2016).
- The Crustal Dynamics Data Information System (CDDIS) Data and Derived Products. Available online: ftp://cddis.gsfc.nasa.gov/pub/gps (accessed on 17 August 2016).
- Kouba, J.; Springer, T. New IGS Station and Satellite Clock Combination. GPS Solut. 2001, 4, 31. [Google Scholar] [CrossRef]
- Zhao, Q.L.; Dai, Z.Q.; Wang, G.X.; Li, X.T.; Liu, J.N. Real-Time Precise BDS Clock Estimation with the Undifferenced Observation; Geomatics and Information Science of Wuhan University: Wuhan, China, 2016. [Google Scholar]
- Ge, M.; Gendt, G.; Rothacher, M.; Shi, C.; Liu, J. Resolution of GPS carrier-phase ambiguities in Precise Point Positioning (PPP) with daily observations. J. Geod. 2008, 82, 401. [Google Scholar] [CrossRef]











{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Day | Federal Agency for Cartography and Geodesy (BKG) (%) | Natural Resources Canada (NRCan) (%) | European Space Agency (ESA) (%) | GeoForschungsZentrum (GFZ) Potsdam (%) | Centre National d’Etudes Spatiales (CNES) (%) | IGS (%) |
|---|---|---|---|---|---|---|
| 349 | 43.7 | 37.9 | 53.3 | 44.8 | 50.8 | 49.1 |
| 350 | 23.3 | 23.1 | 14.2 | 28.0 | 35.1 | 28.3 |
| 351 | 37.5 | 28.4 | 30.7 | 44.4 | 51.8 | 33.2 |
| 352 | 10.3 | 6.7 | 7.9 | 6.0 | 7.5 | 6.9 |
| 353 | 7.9 | 4.8 | 5.5 | 4.6 | 5.7 | 5.5 |
| 354 | 17.3 | 15.5 | 16.1 | 63.4 | 15.4 | 15.9 |
| 355 | 13.8 | 13.2 | 14.1 | 47.9 | 17.0 | 15.2 |
| 356 | 20.9 | 12.3 | 24.2 | 81.8 | 21.0 | 10.5 |
| 358 | 15.6 | 15.8 | 17.5 | 3.3 | 15.7 | 15.8 |
| Satellite Type | Clock Type | Pseudo Random Noise (PRN) |
|---|---|---|
| Block IIR | Rb | 2, 11, 13, 14, 16, 18, 19, 20, 21, 22, 23, 28 |
| Block IIR-M | Rb | 5, 7, 12, 15, 17, 29, 31 |
| Block IIF | Rb | 1, 3, 6, 9, 10, 25, 26, 27, 30, 32 |
| Cs | 8, 24 |
| Linear Model (ns) | Quadratic Polynomial Model (ns) | ||||||||||
|---|---|---|---|---|---|---|---|---|---|---|---|
| Type | 1 h | 2 h | 3 h | 4 h | 5 h | 1 h | 2 h | 3 h | 4 h | 5 h | |
| IIF Cs | G08 | 1.226 | 1.946 | 2.615 | 3.316 | 4.051 | 2.286 | 5.375 | 9.710 | 15.189 | 21.982 |
| G24 | 1.650 | 2.647 | 3.644 | 4.611 | 5.562 | 3.036 | 7.181 | 12.948 | 20.400 | 29.457 | |
| IIR-M Rb | G05 | 0.351 | 0.611 | 0.878 | 1.113 | 1.314 | 0.518 | 1.228 | 2.267 | 3.608 | 5.220 |
| G17 | 0.418 | 0.725 | 1.011 | 1.223 | 1.362 | 0.598 | 1.440 | 2.673 | 4.247 | 6.120 | |
| IIR Rb | G13 | 0.583 | 0.869 | 1.180 | 1.451 | 1.656 | 1.475 | 3.359 | 6.057 | 9.540 | 13.768 |
| G16 | 0.417 | 0.784 | 1.131 | 1.405 | 1.609 | 0.467 | 1.209 | 2.318 | 3.739 | 5.395 | |
| G19 | 0.302 | 0.486 | 0.660 | 0.796 | 0.893 | 0.489 | 1.151 | 2.095 | 3.311 | 4.781 | |
| IIF Rb | G25 | 0.188 | 0.371 | 0.548 | 0.690 | 0.802 | 0.190 | 0.514 | 1.013 | 1.648 | 2.380 |
| G30 | 0.291 | 0.580 | 0.845 | 1.028 | 1.134 | 0.248 | 0.728 | 1.479 | 2.429 | 3.495 | |
| Improvement Percentage of the New 3-h Model with IGS Product (%) | |||||||
|---|---|---|---|---|---|---|---|
| IIF | 1 h | 2 h | 3 h | IIR-M | 1 h | 2 h | 3 h |
| G01 | 50.88 | 39.58 | 28.66 | G05 | 21.37 | 15.90 | −1.44 |
| G03 | 63.12 | 49.27 | 38.92 | G07 | 17.20 | 4.84 | −0.19 |
| G06 | 41.06 | 21.88 | 0.97 | G12 | 50.55 | 51.20 | 50.51 |
| G09 | 31.38 | 16.25 | 1.68 | G15 | 15.73 | 3.75 | −10.59 |
| G10 | 78.55 | 72.53 | 70.03 | G17 | 26.72 | 24.15 | 21.38 |
| G25 | 60.75 | 50.31 | 37.20 | G19 | 18.93 | 9.59 | 3.29 |
| G26 | 66.75 | 60.41 | 55.23 | G31 | 22.08 | 16.86 | 11.87 |
| G27 | 25.26 | 25.56 | 18.30 | ||||
| G30 | 58.89 | 45.83 | 27.12 | ||||
| G32 | 50.29 | 36.85 | 37.39 | ||||
| IIR | 1 h | 2 h | 3 h | IIR | 1 h | 2 h | 3 h |
| G02 | 31.70 | 27.10 | 28.11 | G19 | 18.93 | 9.59 | 3.29 |
| G11 | 76.98 | 75.03 | 73.52 | G20 | 4.92 | −6.74 | −20.96 |
| G13 | −12.47 | −15.77 | −19.04 | G21 | 25.42 | 18.77 | −2.99 |
| G14 | 8.15 | −1.42 | −8.80 | G22 | 18.84 | 10.93 | 2.05 |
| G16 | 37.18 | 34.94 | 16.96 | G23 | −0.81 | −12.78 | −24.10 |
| G18 | 20.58 | 7.06 | −4.09 | G28 | 50.49 | 46.02 | 44.36 |
| Type | Average (ns) | Max (ns) | Min (ns) | ||||||
|---|---|---|---|---|---|---|---|---|---|
| 1-h | 2-h | 3-h | 1-h | 2-h | 3-h | 1-h | 2-h | 3-h | |
| Block IIF | 0.169 | 0.248 | 0.342 | 0.186 | 0.273 | 0.362 | 0.146 | 0.226 | 0.311 |
| Block IIR | 0.275 | 0.376 | 0.506 | 0.309 | 0.464 | 0.633 | 0.249 | 0.334 | 0.414 |
| Block IIR-M | 0.277 | 0.389 | 0.525 | 0.366 | 0.494 | 0.709 | 0.228 | 0.293 | 0.391 |
| BJFS | CEDU | ||||||
|---|---|---|---|---|---|---|---|
| E (m) | N (m) | U (m) | E (m) | N (m) | U (m) | ||
| With prediction | Std | 0.022 | 0.019 | 0.106 | 0.020 | 0.033 | 0.081 |
| Max (absolute) | 0.053 | 0.055 | 0.282 | 0.085 | 0.106 | 0.229 | |
| Without prediction | Std | 0.009 | 0.006 | 0.010 | 0.005 | 0.010 | 0.017 |
| Max (absolute) | 0.041 | 0.021 | 0.084 | 0.036 | 0.029 | 0.098 | |
© 2017 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Lv, Y.; Dai, Z.; Zhao, Q.; Yang, S.; Zhou, J.; Liu, J. Improved Short-Term Clock Prediction Method for Real-Time Positioning. Sensors 2017, 17, 1308. https://doi.org/10.3390/s17061308
Lv Y, Dai Z, Zhao Q, Yang S, Zhou J, Liu J. Improved Short-Term Clock Prediction Method for Real-Time Positioning. Sensors. 2017; 17(6):1308. https://doi.org/10.3390/s17061308
Chicago/Turabian StyleLv, Yifei, Zhiqiang Dai, Qile Zhao, Sheng Yang, Jinning Zhou, and Jingnan Liu. 2017. "Improved Short-Term Clock Prediction Method for Real-Time Positioning" Sensors 17, no. 6: 1308. https://doi.org/10.3390/s17061308
APA StyleLv, Y., Dai, Z., Zhao, Q., Yang, S., Zhou, J., & Liu, J. (2017). Improved Short-Term Clock Prediction Method for Real-Time Positioning. Sensors, 17(6), 1308. https://doi.org/10.3390/s17061308