Wuhan Ionospheric Oblique Backscattering Sounding System and Its Applications—A Review



Abstract
:1. Introduction
2. Development of WIOBSS Operating at Low Transmit Power
2.1. Basic Principles of Operation
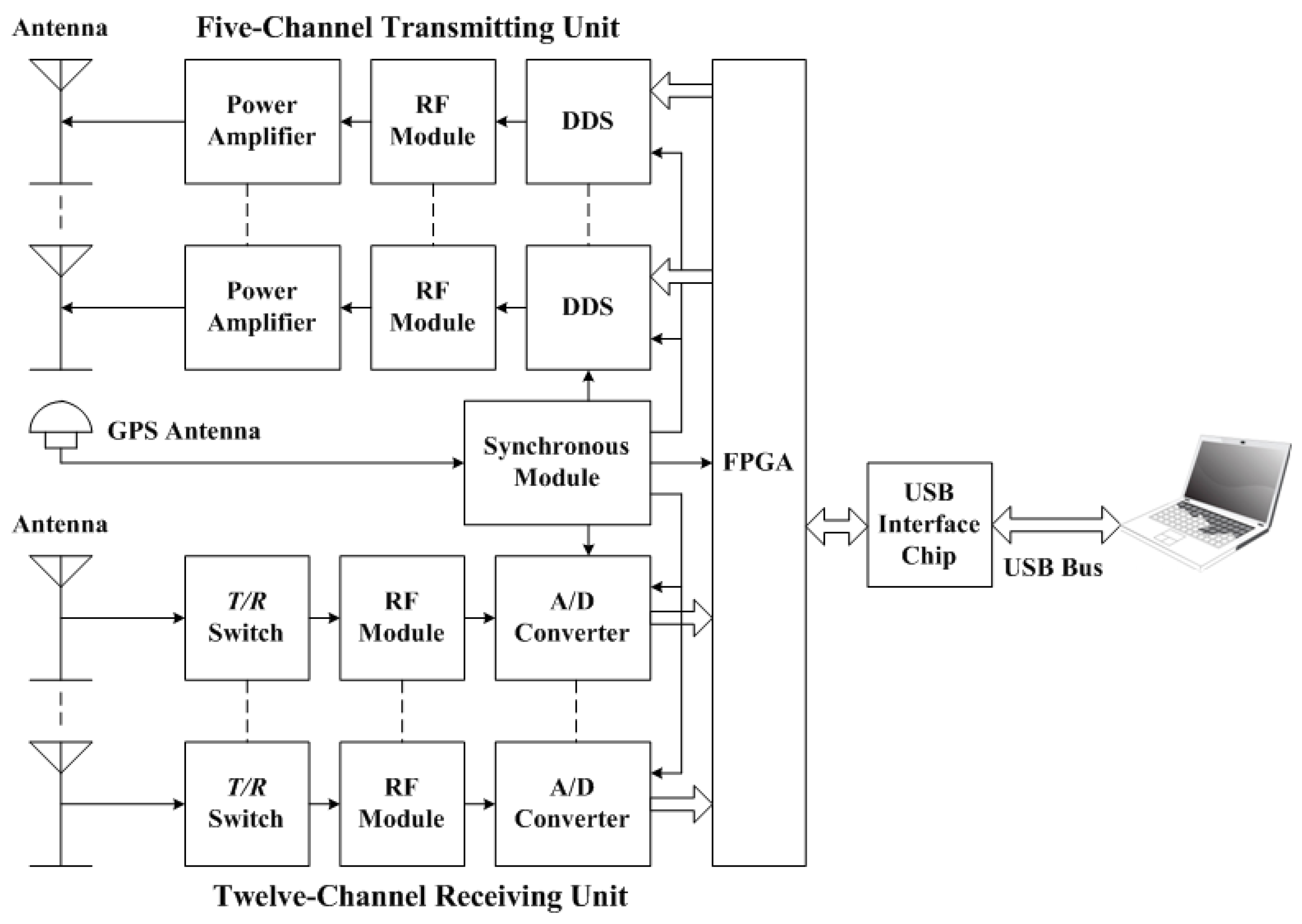
2.2. System Configuration
- (1)
- Since a large number of cables and various data buses had been used, the electromagnetic compatibility and maneuverability were not desirable.
- (2)
- The signal output from the AD9857 was only filtered by an 80 MHz low-pass filter, and was then sent directly to the power amplifier. As a result, the power of the output signal was very low, and its spectrum was not good because the harmonic and other unwanted signals were not filtered out.
- (3)
- The reference clock of the whole system came from an Agilent E8491B module, and its phase noise was somewhat high.
- (4)
- The receiver was not designed specifically for WIOBSS, and some of its parameters cannot meet the requirements well. Moreover, this receiver was dominated by the analogue circuits.
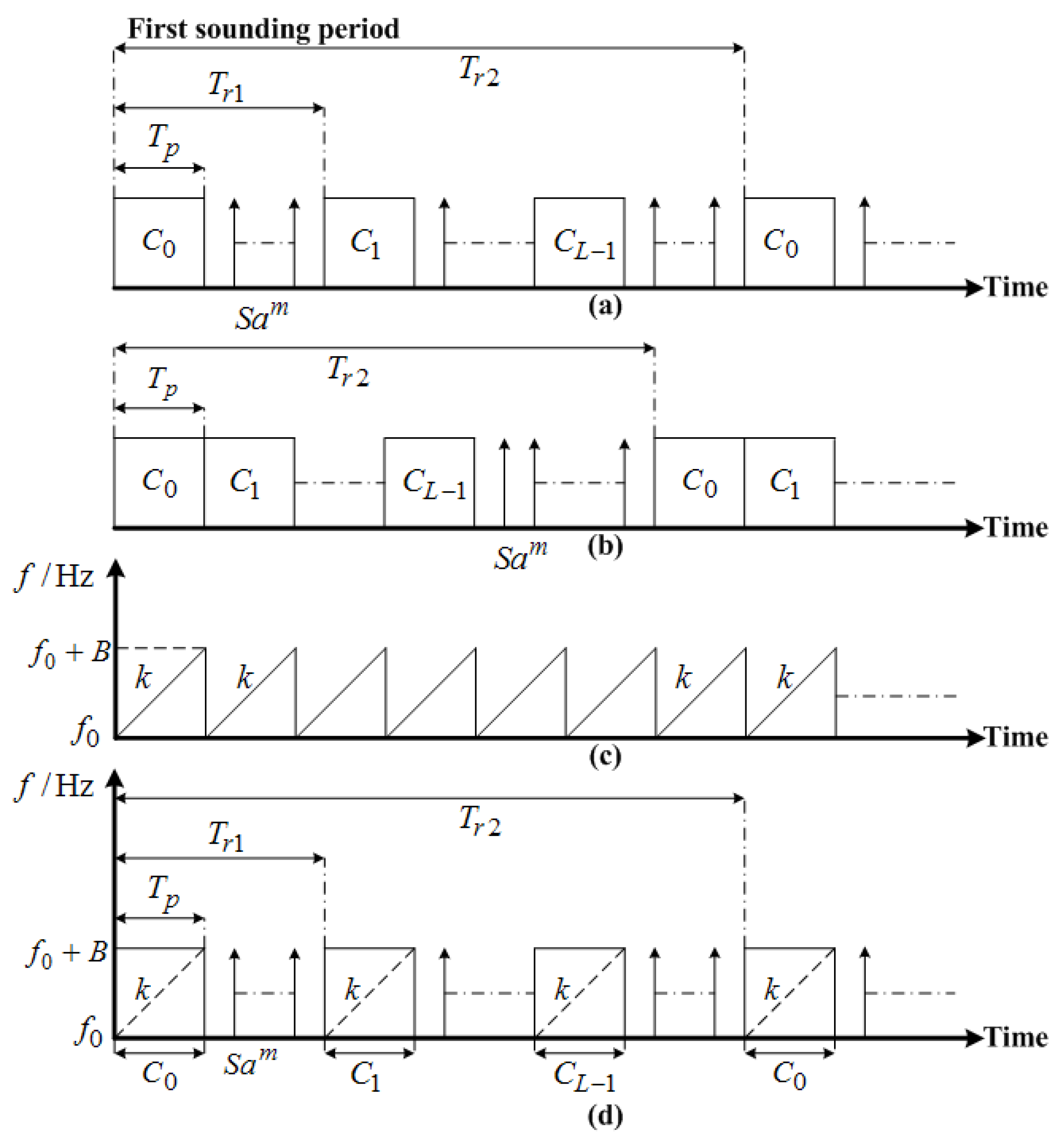
2.3. Sounding Waveforms
2.4. Signal Processing
2.5. Data Processing
3. Remote Sensing Applications of WIOBSS Operating at Low Transmit Power
3.1. Ionospheric Research
3.2. Earthquake Research
3.3. HF Channel Evaluation
3.4. SSL
3.5. Sea-State Sensing
3.6. Aircraft Detection
4. Conclusions and Perspective
4.1. Digital Array Radar Technology
4.2. MIMO Radar Technology
4.3. Ionospheric Joint Observations with Different Sounding Techniques
4.4. Passive Radar Technology
4.5. Spaceborne Ionospheric Sounding Technology
Acknowledgments
Author Contributions
Conflicts of Interest
References
- Raab, F.H.; Caverly, R.; Campbell, R.; Eron, M.; Hecht, J.B.; Mediano, A.; Myer, D.P.; Walker, J.L.B. HF, VHF, and UHF systems and technology. IEEE Trans. Microw. Theory 2002, 50, 888–899. [Google Scholar] [CrossRef]
- Croft, T.A. Sky-wave backscatter: A means for observing our environment at great distances. Rev. Geophys. 1972, 10, 73–155. [Google Scholar] [CrossRef]
- Bazin, V.; Molinie, J.P.; Munoz, J.; Dorey, P.; Saillant, S.; Auffray, G.; Rannou, V.; Lesturgie, M. Nostradamus: An OTH radar. IEEE Aerosp. Electron. Syst. Mag. 2006, 21, 3–11. [Google Scholar] [CrossRef]
- Headrick, J.M.; Thomason, J.F. Applications of high-frequency radar. Radio Sci. 1998, 33, 1045–1054. [Google Scholar] [CrossRef]
- Li, L.W. High-frequency over-the-horizon radar and ionospheric backscatter studies in China. Radio Sci. 1998, 33, 1445–1458. [Google Scholar] [CrossRef]
- Branum, J.R. Ship detection with high-resolution HF skywave radar. IEEE J. Ocean. Eng. 1986, 11, 196–209. [Google Scholar] [CrossRef]
- Anderson, S. Remote sensing with the Jindaleeskywave radar. IEEE J. Ocean. Eng. 1986, 11, 158–163. [Google Scholar] [CrossRef]
- Anderson, S. Remote sensing applications of HF skywave radar: The Australian experience. Turk. J. Electr. Eng. Comput. Sci. 2010, 18, 339–372. [Google Scholar]
- Maresca, J.W.; Georges, T.M.; Carlson, C.T.; Riley, J.P. Two tests of real-time ocean wave-height mapping with HF skywave radar. IEEE J. Ocean. Eng. 1986, 11, 180–186. [Google Scholar] [CrossRef]
- Trizna, D.B. Mapping ocean currents using over-the-horizon HF radar. Int. J. Remote Sens. 1982, 3, 295–309. [Google Scholar] [CrossRef]
- Khan, R.; Gamberg, B.; Power, D.; Walsh, J.; Dawe, B.; Pearson, W.; Millan, D. Target detection and tracking with a high frequency ground wave radar. IEEE J. Ocean. Eng. 1994, 19, 540–548. [Google Scholar] [CrossRef]
- Bruno, L.; Braca, P.; Horstmann, J.; Vespe, M. Experimental evaluation of the range-Doppler coupling on HF surface wave radars. IEEE Geosci. Remote Sens. Lett. 2013, 10, 850–854. [Google Scholar] [CrossRef]
- Barrick, D. History, present status, and future directions of HF surface-wave radars in the US. In Proceedings of the International Radar Conference, Adelaide, Australia, 3–5 September 2003; pp. 652–655. [Google Scholar]
- Walsh, J.; Dawe, B.J.; Srivastava, S.K. Remote sensing of icebergs by ground-wave Doppler radar. IEEE J. Ocean. Eng. 1986, 11, 276–284. [Google Scholar] [CrossRef]
- Gurgel, K.W.; Antonischki, G.; Essen, H.H.; Schlick, T. Wellen Radar (WERA): A new ground-wave HF radar for ocean remote sensing. Coast. Eng. 1999, 37, 219–234. [Google Scholar] [CrossRef]
- Huang, W.; Wu, S.; Gill, E.; Wen, B.; Hou, J. HF radar wave and wind measurement over the eastern China sea. IEEE Trans. Geosci. Remote Sens. 2002, 40, 1950–1955. [Google Scholar] [CrossRef]
- Wyatt, L.R.; Green, J.J.; Middleditch, A.; Moorhead, M.D.; Howarth, J.; Holt, M.; Keogh, S. Operational wave, current, and wind measurements with the Pisces HF radar. IEEE J. Ocean. Eng. 2006, 31, 819–834. [Google Scholar] [CrossRef]
- Lester, M.; Chapman, P.J.; Cowley, S.W.H.; Crooks, S.J.; Davies, J.A.; Hamadyk, P.; McWilliams, K.A.; Milan, S.E.; Parsons, M.J.; Payne, D.B.; et al. Stereo CUTLASS—A new capability for the SuperDARN HF radars. Ann. Geophys. 2004, 22, 459–473. [Google Scholar] [CrossRef]
- Barry, G.H. A low-power vertical-incidence ionosonde. IEEE Trans. Geosci. Electron. 1971, 9, 86–89. [Google Scholar] [CrossRef]
- Bibl, K.; Reinisch, B.W. The universal digital ionosonde. Radio Sci. 1978, 13, 519–530. [Google Scholar] [CrossRef]
- Zuccheretti, E.; Tutone, G.; Sciacca, U.; Bianchi, C.; Arokiasamy, B.J. The new AIS-INGV digital ionosonde. Ann. Geophys. 2003, 46, 647–659. [Google Scholar]
- Arthur, P.C.; Cannon, P.S. ROSE: A high performance oblique ionosonde providing new opportunities for ionospheric research. Ann. Geofis. 1994, 37, 135–144. [Google Scholar]
- Arthur, P.C.; Thomas, E.C.; Cannon, P.S.; Warrington, E.M.; Davies, N.C.; Thornhill, J. A GPS locked oblique ionosonde system using IRIS. In Proceedings of the 1996 IEE Colloquium on Remote Sensing of the Propagation Environment, London, UK, 19 November 1996. [Google Scholar]
- Cannon, P.S.; Davies, N.C.; Angling, M.J.; Jodalen, V.; Moreland, K.W.; Lundborg, B. Initial results from DAMSON—A system to measure multipath, Doppler spread and Doppler shift on disturbed HF channels. In Proceedings of the Ninth International Conference on Antennas and Propagation, Eindhoven, The Netherlands, 4–7 April 1995; Volume 2, pp. 104–108. [Google Scholar]
- Baddeley, L.J.; Yeoman, T.K.; Wright, D.M. HF Doppler sounder measurements of the ionospheric signatures of small scale ULF waves. Ann. Geophys. 2005, 23, 1807–1820. [Google Scholar] [CrossRef]
- Settimi, A.; Pezzopane, M.; Pietrella, M.; Bianchi, C.; Scotto, C.; Zuccheretti, E. Testing the IONORT-ISP system: A comparison between synthesized and measured oblique ionograms. Radio Sci. 2013, 48, 167–179. [Google Scholar] [CrossRef]
- Reinisch, B.W.; Abdu, M.; Batista, I.; Sales, G.S.; Khmyrov, G.; Bullett, T.A.; Chau, J.; Rios, V. Multistationdigisonde observations of equatorial spread F in South America. Ann. Geophys. 2004, 22, 3145–3153. [Google Scholar] [CrossRef]
- Ivanov, V.A.; Kurkin, V.I.; Nosov, V.E.; Uryadov, V.P.; Shumaev, V.V. Chirp ionosonde and its application in the ionospheric research. Radiophys. Quant. Electron. 2003, 46, 919–953. [Google Scholar] [CrossRef]
- Blagoveshchensky, D.V.; Lester, M.; Kornienko, V.A.; Shagimuratov, I.I.; Stocker, A.J.; Warringtong, E.M. Observations by the CUTLASS radar, HF Doppler, oblique ionospheric sounding, and TEC from GPS during a magnetic storm. Ann. Geophys. 2005, 23, 1697–1709. [Google Scholar] [CrossRef]
- Chisham, G.; Lester, M.; Milan, S.E.; Freeman, M.P.; Bristow, W.A.; Grocott, A.; McWilliams, K.A.; Ruohoniemi, J.M.; Yeoman, T.K.; Dyson, P.L.; et al. A decade of the Super Dual Auroral Radar Network (SuperDARN): Scientific achievements, new techniques and future directions. Surv. Geophys. 2007, 28, 33–109. [Google Scholar] [CrossRef]
- Ads, A.G.; Bergada, P.; Vilella, C.; Regue, J.R.; Pijoan, J.L.; Bardaji, R.; Mauricio, J. A comprehensive sounding of the ionospheric HF radio link from Antarctica to Spain. Radio Sci. 2013, 48, 1–12. [Google Scholar] [CrossRef]
- Goodman, J.; Ballard, J.; Sharp, E. A long-term investigation of the HF communication channel over middle- and high-latitude paths. Radio Sci. 1997, 32, 1705–1715. [Google Scholar] [CrossRef]
- Earl, G. F.; Ward, B.D. The frequency management system of the Jindalee over-the-horizon backscatter HF radar. Radio Sci. 1987, 22, 275–291. [Google Scholar] [CrossRef]
- Occhipinti, G.; Dorey, P.; Farges, T.; Lognonne, P. Nostradamus: The radar that wanted to be a seismometer. Geophys. Res. Lett. 2010, 37, L18104. [Google Scholar] [CrossRef]
- MacDougall, J.W.; Li, X. Meteor observations with a modern digital ionosonde. J. Atmos. Sol. Terr. Phys. 2001, 63, 135–141. [Google Scholar] [CrossRef]
- Jenkins, B.; Jarvis, M.J. Mesospheric winds derived from SuperDARN HF radar meteor echoes at Halley, Antarctica. Earth Planets Space 1999, 51, 685–689. [Google Scholar] [CrossRef]
- Tang, X.; Han, Y.; Zhou, W. Skywave over-the-horizon backscatter radar. In Proceedings of the 2001 CIE International Conference on Radar, Beijing, China, 15–18 October 2001; pp. 90–94. [Google Scholar]
- Jiao, P.; Fan, J.; Liu, W.; Li, T. Some new experimental research of HF backscatter propagation in CRIRP. In Proceedings of the 2004 Asia-Pacific Radio Science Conference, Qingdao, China, 24–27 August 2004; pp. 13–16. [Google Scholar]
- Dyson, P.L.; Devlin, J.C.; Parkinson, M.L.; Whittington, J.S. The Tasman International Geospace Environment Radar (TIGER)—Current development and future plans. In Proceedings of the International Conference on Radar, Adelaide, Australia, 3–5 September 2003; pp. 282–287. [Google Scholar]
- Colegrove, S.B. Project Jindalee: From bare bones to operational OTHR. In Proceedings of the IEEE 2000 International Radar Conference, Alexandria, VA, USA, 7–12 May 2000; pp. 825–830. [Google Scholar]
- Whittington, J.; Devlin, J.; Nguyen, M. Digital stereo enhancement to the TIGER radar system. In Proceedings of the Workshop on Applications of Radio Science (WARS’04), Hobart, Tasmania, 18–20 February 2004. [Google Scholar]
- Reinisch, B.W.; Galkin, I.A.; Khmyrov, G.M.; Kozlov, A.V.; Bibl, K.; Lisysyan, I.A.; Cheney, G.; Huang, X.; Kitrosser, D.F.; Paznukhov, V.V.; et al. New Digisonde for research and monitoring applications. Radio Sci. 2009, 44, RS0A24. [Google Scholar] [CrossRef]
- Bazin, V.; Molinie, J.P.; Munoz, J.; Dorey, P.; Saillant, S.; Auffray, G.; Rannou, V.; Lesturgie, M. A general presentation about the OTH-Radar NOSTRADAMUS. In Proceedings of the 2006 IEEE Radar Conference, Verona, WI, USA, 24–27 April 2006; pp. 634–642. [Google Scholar]
- Chong, Y.; Xie, S.; Huang, T. The bitemporal response function method in studying the ionospheric movement. In Proceedings of the 5th International Symposium on Antennas, Propagation and EM Theory, Beijing, China, 15–18 August 2000; pp. 548–551. [Google Scholar]
- Goutelard, C. Coding and sounding: Extremely low power sounder. In Proceedings of the 1997 7th International Conference on HF Radio Systems and Techniques, Nottingham, UK, 7–10 July 1997; pp. 110–114. [Google Scholar]
- Yao, Y.G.; Zhao, Z.Y.; Xie, S.G.; Huang, T.X. The applications of m sequence and FH sequence to ionospheric backscattering sounding. Chin. J. Radio Sci. 2001, 16, 522–528. [Google Scholar]
- Shi, S.Z.; Zhao, Z.Y.; Su, F.F.; Chen, G. A low-power and small-size HF backscatter radar for ionospheric sensing. IEEE Geosci. Remote Sens. Lett. 2009, 6, 504–508. [Google Scholar]
- Zhao, Z.Y.; Chen, G. The survey of ionospheric scattering function. Progress in Electromagnetics Research Symposium, Hangzhou, China, 22–26 August 2005; pp. 453–456. [Google Scholar]
- Chen, G.; Zhao, Z.Y.; Zhang, Y.N. Ionospheric Doppler and echo phase measured by the Wuhan ionospheric oblique backscattering sounding system. Radio Sci. 2007, 42, RS4007. [Google Scholar] [CrossRef]
- Sun, H.Q.; Yang, G.B.; Zhang, Y.N.; Zhu, P.; Cui, X.; Jiang, C.H.; Wang, F. The hardware design of a new ionospheric sounding system. IEICE Electron. Exp. 2014, 11, 20140249. [Google Scholar] [CrossRef]
- Chen, V.C.; Ling, H. Joint time-frequency analysis for radar signal and image processing. IEEE Signal Process. Mag. 1999, 16, 81–93. [Google Scholar] [CrossRef]
- Huang, W.; Gill, E.; Wu, S.; Wen, B.; Yang, Z.; Hou, J. Measuring surface wind direction by monostatic HF ground-wave radar at the Eastern China sea. IEEE J. Ocean. Eng. 2004, 29, 1032–1037. [Google Scholar] [CrossRef]
- Li, T. Research on Location Technology in the Ionospheric Sounding System. Ph.D. Thesis, Wuhan University, Wuhan, China, 2013. [Google Scholar]
- Liu, J.H.; Zhao, Z.Y.; Chen, X.T.; Yao, Y.G. The real-time DSP system design of the ionospheric oblique backscattering sounding system. J. Wuhan Univ. Nat. Sci. Ed. 2003, 49, 132–136. [Google Scholar]
- Chen, X.T.; Zhao, Z.Y.; Liu, J.H.; Xie, S.G. Research of the hardware structure for novel oblique backscatter ionosonde. Chin. J. Radio Sci. 2003, 18, 673–678. [Google Scholar]
- Chen, X.; Zhao, Z.Y.; Shi, Y.; Shi, S.Z. Design and implement of main controller in ionospheric oblique backscattering sounding system. Chin. J. Radio Sci. 2005, 20, 598–603. [Google Scholar]
- Nie, X.D.; Zhao, Z.Y.; Shi, Y.; Yao, W.L.; Chen, G. Design of the HF receiver for the new type ionospheric oblique backscattering sounding system. J. Wuhan Univ. Nat. Sci. Ed. 2005, 51, 95–99. [Google Scholar]
- Yao, W.L.; Zhao, Z.Y.; Chen, X. Design of the signal source module for ionospheric oblique backscattering sounding system based on VXI bus. J. Wuhan Univ. Nat. Sci. Ed. 2005, 51, 100–104. [Google Scholar]
- Shi, S.Z.; Zhao, Z.Y.; Yang, G.B.; Zhang, Y.N.; Liu, R.Y. Design and implementation of hardware architecture in ionospheric oblique backscattering sounding system. Wuhan Univ. J. Nat. Sci. 2009, 14, 53–59. [Google Scholar] [CrossRef]
- Chen, G.; Zhao, Z.Y.; Li, S.P.; Shi, S.Z. WIOBSS: The Chinese low-power digital ionosonde for ionospheric backscattering detection. Adv. Space Res. 2009, 43, 1343–1348. [Google Scholar] [CrossRef]
- Yang, G.B.; Zhao, Z.Y.; Chen, X.Y. Ionospheric sounding system based on phase modulated pulse compression. J. Huazhong Univ. Sci. Technol. Nat. Sci. Ed. 2009, 37, 33–35. [Google Scholar]
- Shi, S.Z.; Zhao, Z.Y.; Li, S.P.; You, M. Design of ionospheric sounding system using PXI bus. J. Huazhong Univ. Sci. Technol. Nat. Sci. Ed. 2009, 37, 56–59. [Google Scholar]
- Wang, F.; Zhao, Z.Y.; Jiang, C.H. Design of upper computer’s integrated software for ionosphericmonostatic system. J. Huazhong Univ. Sci. Technol. Nat. Sci. Ed. 2009, 37, 22–25. [Google Scholar]
- Shi, S.Z.; Zhao, Z.Y.; Li, T. Design of the time synchronization for Wuhan radio ionospheric oblique sounding system. Chin. J. Radio Sci. 2009, 24, 1089–1093. [Google Scholar]
- Chen, G.; Zhao, Z.Y.; Zhu, G.Q.; Shi, S.Z. The Wuhan ionospheric sounding systems. IEEE Geosci. Remote Sens. Lett. 2009, 6, 748–751. [Google Scholar] [CrossRef]
- Shi, S.Z.; Chen, G.; Yang, G.B.; Li, T.; Zhao, Z.Y.; Liu, J.N. Wuhan ionospheric oblique-incidence sounding system and its new application in localization of ionospheric irregularities. IEEE Trans. Geosci. Remote Sens. 2015, 53, 2185–2194. [Google Scholar] [CrossRef]
- Shi, S.Z.; Zhao, Z.Y.; Liu, Y.; Chen, G.; Li, T.; Liu, J.N.; Yao, M. Experimental demonstration for ionospheric sensing and aircraft detection with a HF skywavemultistatic radar. IEEE Geosci. Remote Sens. Lett. 2014, 11, 1270–1274. [Google Scholar]
- Shi, S.Z.; Yang, G.B.; Zhao, Z.Y.; Liu, J.N. A novel ionospheric oblique-incidence sounding network consisting of the ionospheric oblique backscatter sounder and the parasitic oblique-incidence sounder. IEEE Geosci. Remote Sens. Lett. 2015, 12, 2070–2074. [Google Scholar]
- Gutterman, L. PXI: The future of test. In Proceedings of the IEEE Systems Readines Technology Conference, Huntsville, AL, USA, 17 October 2002; pp. 205–214. [Google Scholar]
- Yao, M.; Chen, G.; Zhao, Z.Y.; Wang, Y.H.; Bai, B. A novel low-power multifunctional ionospheric sounding system. IEEE Trans. Instrum. Meas. 2012, 61, 1252–1259. [Google Scholar] [CrossRef]
- Yang, G.B.; Zhao, Z.Y.; Zhou, C.; Zhang, Y.N.; Chen, G.; Hu, Y.G. A new type multi-function ionospheric sounding system. In Proceedings of the 2011 30th URSI General Assembly and Scientific Symposium, Istanbul, Turkey, 13–20 August 2011. [Google Scholar]
- Wang, F.; Zhao, Z.Y.; Li, T. Design and implementation of auto hopped frequency sound mode in monostaticionospheric sounding system. Chin. J. Radio Sci. 2009, 24, 604–609. [Google Scholar]
- Huang, S.; Zhao, Z.Y.; Yang, G.B.; Chen, G.; Li, T.; Li, N.; Yang, J.J. A new design of low-power portable digital ionosonde. Adv. Space Res. 2013, 51, 388–394. [Google Scholar] [CrossRef]
- Bartenev, V.G. Software radar: New reality. In Proceedings of the 2006 CIE International Conference on Radar (ICR 2006), Shanghai, China, 16–19 October 2006. [Google Scholar]
- Huang, S. The Research of the receiving Subsystem of Multichannel Ionosonde. Ph.D. Thesis, Wuhan University, Wuhan, China, 2013. [Google Scholar]
- Sun, H.Q. The Hardware Design and Application of the Wuhan Multi-Channel Ionospheric Sounding System. Ph.D. Thesis, Wuhan University, Wuhan, China, 2015. [Google Scholar]
- Cui, X.; Chen, G.; Wang, J.; Song, H.; Gong, W.L. Design and application of Wuhan ionospheric oblique backscattering sounding system with the addition of an antenna array (WIOBSS-AA). Sensors. 2016, 16, 887. [Google Scholar] [CrossRef] [PubMed]
- Ning, B.Q.; Hu, L.H.; Li, G.Z.; Liu, L.B.; Wan, W.X. The first time observations of low-latitude ionospheric irregularities by VHF radar in Hainan. Sci. China Technol. Sci. 2012, 55, 1189–1197. [Google Scholar] [CrossRef]
- Sun, H.Q.; Yang, G.B.; Cui, X.; Zhu, P.; Jiang, C.H. Design of an ultra widebandionosonde. IEEE Geosci. Remote Sens. Lett. 2015, 12, 1042–1045. [Google Scholar]
- Yao, M.; Zhao, Z.Y.; Chen, G.; Yang, G.B.; Li, S.P.; Su, F.F.; Li, N.; Huang, S.; Li, T.; He, Z.W.; et al. A novel radar waveform for monostaticionosonde. IEEE Geosci. Remote Sens. Lett. 2011, 8, 39–43. [Google Scholar] [CrossRef]
- Wolfmann, J. Almost perfect autocorrelation sequences. IEEE Trans. Inf. Theory 1992, 38, 1412–1418. [Google Scholar] [CrossRef]
- Chen, G.; Zhao, Z.Y.; Pu, T.Y.; Huang, Y.J.; Zhu, G.Q. Almost perfect sequences applied for ionospheric oblique backscattering detection. Radio Sci. 2009, 44, RS5010. [Google Scholar] [CrossRef]
- Yao, M.; Zhao, Z.Y.; Chen, G.; Yang, G.B.; Su, F.F.; Li, S.P.; Zhang, X.M. Comparison of radar waveforms for a low-power vertical-incidence ionosonde. IEEE Geosci. Remote Sens. Lett. 2010, 7, 636–640. [Google Scholar] [CrossRef]
- Mao, T.; Xia, W.; Wang, X.; Chen, B. Complementary code applied to HF surface wave radar. Chin. J. Radio Sci. 2010, 25, 485–490. [Google Scholar]
- Stove, A.G. Linear FMCW radar techniques. Proc. Inst. Electr. Eng. F Radar Signal Process. 1992, 139, 343–350. [Google Scholar] [CrossRef]
- Shi, S.Z.; Zhao, Z.Y.; Liu, J.N. Comparison of radar waveforms combining pseudo-random binary phase coding and chirp modulation for an high-frequency monostatic radar. IET Radar Sonar Navig. 2016, 10, 935–944. [Google Scholar] [CrossRef]
- Shi, S.Z.; Yang, G.B.; Zhao, Z.Y.; Liu, J.N. A novel radar waveform design for a low-power HF monostatic radar. IEEE Geosci. Remote Sens. Lett. 2015, 12, 1352–1356. [Google Scholar]
- Chen, X.T. The Ionospheric Effects on the High Frequency Skywave Radar and the Correction Methods. Master’s Thesis, Wuhan University, Wuhan, China, May 2004. [Google Scholar]
- Wang, F. Design and Implementation of Signal and Data Processing Subsystem in Wuhan Ionospheric Sounding System. Ph.D. Thesis, Wuhan University, Wuhan, China, 2009. [Google Scholar]
- Fang, L.; Zhao, Z.Y.; Wang, F. Preprocessing of ionospheric echo Doppler spectra. J. Wuhan Univ. Nat. Sci. Ed. 2006, 52, 114–118. [Google Scholar] [CrossRef]
- Reinisch, B.W.; Galkin, I.A.; Khmyrov, G.M.; Kozlov, A.V.; Lisysyan, I.A.; Bibl, K.; Cheney, G.; Kitrosser, D.; Stelmash, S.; Roche, K.; et al. Advancing digisonde technology: The DPS-4D. In Proceedings of the AIP Conference on Radio Sounding and Plasma Physics, Lowell, MA, USA, 30 April–3 May 2007; pp. 127–143. [Google Scholar]
- Chen, G.; Zhao, Z.Y.; Zhu, G.Q.; Huang, Y.J.; Li, T. HF radio-frequency interference mitigation. IEEE Geosci. Remote Sens. Lett. 2010, 7, 479–482. [Google Scholar] [CrossRef]
- Wang, F.; Zhao, Z.Y.; Li, T. Filtering the interference of ionospheric backscatter radars by using 2D OSF. J. Huazhong Univ. Sci. Technol. Nat. Sci. Ed. 2009, 37, 18–21. [Google Scholar]
- Baden, J.M.; Cohen, M.N. Optimal sidelobe suppression for biphase codes. In Proceedings of the 1991 National Telesystems Conference, Atlanta, GA, USA, 26–27 March 1991; Volume 1, pp. 127–131. [Google Scholar]
- Salim, T.; Devlin, J.; Whittington, J. High resolution timing vector for FPGA implementation of a phased array DBF. In Proceedings of the 2004 IEEE International Conference on Field-Programmable Technology, Brisbane, Australia, 6–8 December2004; pp. 339–342. [Google Scholar]
- Schmidt, R.O. Multiple emitter location and signal parameter estimation. IEEE Trans. Antennas Propag. 1986, 34, 276–281. [Google Scholar] [CrossRef]
- Guo, X.; Ni, J.L.; Liu, G.S. Architecture and signal processing of sky wave over-the-horizon radar. Radio Sci. 2003, 38, 1092. [Google Scholar] [CrossRef]
- Li, T.; Yang, G.B.; Wang, P.X.; Chen, G.; Zhou, C.; Zhao, Z.Y.; Huang, S. High-frequency radar aircraft detection method based on neural networks and time-frequency algorithm. IET Radar Sonar Navig. 2013, 7, 875–880. [Google Scholar] [CrossRef]
- Zhou, C.; Zhao, Z.Y. Over horizon radar mode recognition and target localization based on hidden Markov model. Syst. Eng. Electron. 2009, 31, 305–309. [Google Scholar]
- Su, F.F.; Zhao, Z.Y.; Li, S.P.; Yao, M.; Chen, G.; Zhou, Y.Y. Signal identification and trace extraction for the vertical ionogram. IEEE Geosci. Remote Sens. Lett. 2012, 9, 1031–1035. [Google Scholar] [CrossRef]
- Jiang, C.H.; Yang, G.B.; Zhao, Z.Y.; Zhang, Y.N.; Zhu, P.; Sun, H.Q. An automatic scaling technique for obtaining F2 parameters and F1 critical frequency from vertical incidence ionograms. Radio Sci. 2013, 48, 739–751. [Google Scholar] [CrossRef]
- Jiang, C.H.; Yang, G.B.; Zhao, Z.Y.; Zhang, Y.N.; Zhu, P.; Sun, H.Q.; Zhou, C. A method for the automatic calculation of electron density profiles from vertical incidence ionograms. J. Atmos. Sol. Terr. Phys. 2014, 107, 20–29. [Google Scholar] [CrossRef]
- Jiang, C.H.; Zhang, Y.N.; Yang, G.B.; Zhu, P.; Sun, H.Q.; Cui, X.; Song, H.; Zhao, Z.Y. Automatic scaling of the sporadic E layer and removal of its multiple reflection and backscatter echoes for vertical incidence ionograms. J. Atmos. Sol. Terr. Phys. 2015, 129, 41–48. [Google Scholar] [CrossRef]
- Jiang, C.H.; Yang, G.B.; Lan, T.; Zhu, P.; Song, H.; Zhou, C.; Cui, X.; Zhao, Z.Y.; Zhang, Y.N. Improvement of automatic scaling of vertical incidence ionograms by simulated annealing. J. Atmos. Sol. Terr. Phys. 2015, 133, 178–184. [Google Scholar] [CrossRef]
- Jiang, C.H.; Yang, G.B.; Zhu, P.; Nishioka, M.; Yokoyama, T.; Zhou, C.; Song, H.; Lan, T.; Zhao, Z.Y.; Zhang, Y.N. Reconstruction of the vertical electron density profile based on vertical TEC using the simulated annealing algorithm. Adv. Space Res. 2016, 57, 2167–2176. [Google Scholar] [CrossRef]
- Jiang, C.H.; Yang, G.B.; Zhou, Y.; Zhu, P.; Lan, T.; Zhao, Z.Y.; Zhang, Y.N. Software for scaling and analysis of vertical incidence ionograms-ionoScaler. Adv. Space Res. 2017, 59, 968–979. [Google Scholar] [CrossRef]
- Chen, G.; Zhao, Z.Y.; Zhang, Y.N.; Yang, G.B.; Zhou, C.; Huang, S.; Li, T.; Li, N.; Sun, H.Q. Application of the oblique ionogram as vertical ionogram. Sci. China Technol. Sci. 2012, 55, 1240–1244. [Google Scholar] [CrossRef]
- Song, H.; Hu, Y.G.; Zhao, Z.Y.; Jiang, C.H. Inversion of oblique ionograms based on hybrid genetic algorithm. Chin. J. Geophys. 2014, 57, 703–714. [Google Scholar]
- Hu, Y.G.; Song, H.; Zhao, Z.Y.; Jiang, C.H. Automatic scaling of F2 layer trace from oblique ionogram. J. Huazhong Univ. Sci. Technol. Nat. Sci. Ed. 2014, 42, 49–53. [Google Scholar]
- Wang, D.P.; Song, H.; Hu, Y.G.; Xie, C.; Zhao, Z.Y. The intelligentized extraction of the traces from oblique ionogram. Chin. J. Radio Sci. 2016, 31, 957–961. [Google Scholar]
- Song, H.; Hu, Y.G.; Jiang, C.H.; Zhou, C.; Zhao, Z.Y.; Zou, X.J. An automatic scaling method for obtaining the trace and parameters from oblique ionogram based on hybrid genetic algorithm. Radio Sci. 2016, 51, 1838–1854. [Google Scholar] [CrossRef]
- Coleman, C.J. On the simulation of backscatter ionograms. J. Atmos. Sol. Terr. Phys. 1997, 59, 2089–2099. [Google Scholar] [CrossRef]
- Song, H.; Hu, Y.G.; Jiang, C.H.; Zhou, C.; Zhao, Z.Y. Automatic scaling of HF swept-frequency backscatter ionograms. Radio Sci. 2015, 50, 381–392. [Google Scholar] [CrossRef]
- Song, J.; Zhao, Z.Y.; Zhou, C.; Chen, G. Inversion of HF sweep-frequency backscatter ionograms. Chin. J. Geophys. 2011, 54, 1953–1959. [Google Scholar]
- Li, N.; Zhao, Z.Y.; Zhou, C.; Chen, G.; Yang, G.B.; Huang, S.; Li, T. Inversion of sweep frequency backscatter ionogram from monostatic HF sky-wave radar. IEEE Geosci. Remote Sens. Lett. 2013, 10, 1360–1364. [Google Scholar] [CrossRef]
- Zhu, P.; Zhou, C.; Zhang, Y.N.; Yang, G.B.; Jiang, C.H.; Sun, H.Q.; Cui, X. F region electron density profile inversion from backscatter ionogram based on international reference ionosphere. J. Atmos. Sol. Terr. Phys. 2015, 129, 111–118. [Google Scholar] [CrossRef]
- Zhou, C.; Lei, Y.; Li, B.F.; An, J.C.; Zhu, P.; Jiang, C.H.; Zhao, Z.Y.; Zhang, Y.N.; Ni, B.B.; Wang, Z.M.; et al. Comparisons of ionospheric electron density distributions reconstructed by GPS computerized tomography, backscatter ionograms, and vertical ionograms. J. Geophys. Res. Space Phys. 2015, 120, 11032–11047. [Google Scholar] [CrossRef]
- Galkin, I.A.; Khmyrov, G.M.; Kozlov, A.; Reinisch, B.W.; Huang, X.; Kitrosser, D.F. Ionosonde networking, databasing, and Web serving. Radio Sci. 2006, 41, RS5S33. [Google Scholar] [CrossRef]
- Jiang, C.H. Automatic Processing and Analysis of Data Recorded by Wuhan Ionospheric Sounding System. Ph.D. Thesis, Wuhan University, Wuhan, China, 2015. [Google Scholar]
- Su, F.F.; Zhao, Z.Y.; Deng, F.; Li, S.P. Estimation of ground range on the sweep frequency backscatter leading edge. Adv. Space Res. 2011, 47, 1187–1193. [Google Scholar] [CrossRef]
- Li, T.; Zhao, Z.Y.; Su, F.F.; Chen, G. System design of intelligent display control for ionospheric oblique back scattering sounding. J. Beijing Univ. Technol. 2012, 38, 1052–1056. [Google Scholar]
- Wheadon, N.S.; Whitehouse, J.C.; Milsom, J.D.; Herring, R.N. Ionospheric modelling and target coordinate registration for HF sky-wave radars. In Proceedings of the 6th International Conference on HF Radio Systems and Techniques, York, UK, 4–7 July 1994; pp. 258–266. [Google Scholar]
- Zhou, C.; Zhao, Z.Y. Effects of random changes in ionosphere on OTH radar coordinate registration. Chin. J. Radio Sci. 2008, 23, 894–898. [Google Scholar]
- Zhou, C.; Zhao, Z.Y.; Deng, F. Effects of the travelling ionospheric disturbance on skywave over-the-horizon radar coordinate registration. Syst. Eng. Electron. 2011, 33, 2222–2225. [Google Scholar]
- Song, J.; Zhao, Z.Y.; Zhou, C.; Chen, G. Study on sky-wave over-the-horizon location model of high frequency multistatic system. Syst. Eng. Electron. 2011, 33, 272–275. [Google Scholar]
- Gong, W.L.; Cui, X.; Pan, L.Y. Design and application of the digital multifunctional ionosonde. IET Radar Sonar Navig. 2016, 10, 1303–1309. [Google Scholar] [CrossRef]
- Jiang, C.H.; Yang, G.B.; Deng, C.; Zhou, C.; Zhu, P.; Yokoyama, T.; Song, H.; Lan, T.; Ni, B.B.; Zhao, Z.Y.; et al. Simultaneous observations of F2 layer stratification and spread F at postmidnight over a northern equatorial anomaly region. J. Geophys. Res. Space Phys. 2015, 120, 10979–10991. [Google Scholar] [CrossRef]
- Jiang, C.H.; Deng, C.; Yang, G.B.; Liu, J.; Zhu, P.; Yokoyama, T.; Song, H.; Lan, T.; Zhou, C.; Wu, X.B.; et al. Latitudinal variation of the specific local time of postmidnight enhancement peaks in F layer electron density at low latitudes: A case study. J. Geophys. Res. Space Phys. 2016, 121, 3476–3483. [Google Scholar] [CrossRef]
- Jiang, C.H.; Yang, G.B.; Liu, J.; Yokoyama, T.; Komolmis, T.; Song, H.; Lan, T.; Zhou, C.; Zhang, Y.N.; Zhao, Z.Y. Ionosonde observations of daytime spread F at low latitudes. J. Geophys. Res. Space Phys. 2016, 121, 12093–12103. [Google Scholar] [CrossRef]
- Zhang, X.M.; Zhao, Z.Y.; Zhang, Y.N. Investigation of low-latitude ionospheric field-aligned irregularities by oblique backscatter sounding. IEEE Geosci. Remote Sens. Lett. 2010, 7, 241–245. [Google Scholar] [CrossRef]
- Zhou, C.; Zhao, Z.Y.; Yang, G.B.; Chen, G.; Hu, Y.G.; Zhang, Y.N. Evidence of low-latitude daytime large-scale traveling ionospheric disturbances observed by high-frequency multistatic backscatter sounding system during a geomagnetically quiet period. J. Geophys. Res. 2012, 117, A06302. [Google Scholar] [CrossRef]
- Gong, W.L.; Qi, H. Study on the scale distribution of the field-aligned irregularities in E-region. Adv. Space Res. 2016, 58, 2469–2475. [Google Scholar] [CrossRef]
- Zhang, X.M.; Zhao, Z.Y.; Zhang, Y.N.; Zhou, C. Observations of the ionosphere in the equatorial anomaly region using WISS during the total solar eclipse of 22 July 2009. J. Atmos. Sol. Terr. Phys. 2010, 72, 869–875. [Google Scholar] [CrossRef]
- Chen, G.; Zhao, Z.; Zhou, C.; Yang, G.; Zhang, Y. Solar eclipse effects of 22 July 2009 on sporadic-E. Ann. Geophys. 2010, 28, 353–357. [Google Scholar] [CrossRef]
- Chen, G.; Zhao, Z.Y.; Yang, G.B.; Zhou, C.; Yao, M.; Li, T.; Huang, S.; Li, N. Enhancement and HF Doppler observations of sporadic-E during the solar eclipse of 22 July 2009. J. Geophys. Res. 2010, 115, A09325. [Google Scholar] [CrossRef]
- Chen, G.; Zhao, Z.Y.; Zhang, Y.N.; Yang, G.B.; Zhou, C.; Huang, S.; Li, T.; Li, N.; Sun, H.Q. Gravity waves and spread Es observed during the solar eclipse of 22 July 2009. J. Geophys. Res. 2011, 116, A09314. [Google Scholar] [CrossRef]
- Chen, G.; Wu, C.; Zhao, Z.Y.; Zhong, D.K.; Qi, H.; Jin, H. Daytime E region field-aligned irregularities observed during a solar eclipse. J. Geophys. Res. Space Phys. 2014, 119, 10633–10640. [Google Scholar] [CrossRef]
- Chen, G.; Zhao, Z.Y.; Ning, B.Q.; Deng, Z.X.; Yang, G.B.; Zhou, C.; Yao, M.; Li, S.P.; Li, N. Latitudinal dependence of the ionospheric response to solar eclipse of 15 January 2010. J. Geophys. Res. 2011, 116, A06301. [Google Scholar] [CrossRef]
- Chen, G.; Qi, H.; Ning, B.Q.; Zhao, Z.Y.; Yao, M.; Deng, Z.X.; Li, T.; Huang, S.; Feng, W.C.; Wu, J.H.; et al. Nighttime ionospheric enhancements induced by the occurrence of an evening solar eclipse. J. Geophys. Res. Space Phys. 2013, 118, 6588–6596. [Google Scholar] [CrossRef]
- Liu, Y.; Weisberg, R.H.; Merz, C.R.; Lichtenwalner, S.; Kirkpatrick, G.J. HF radar performance in a low-energy environment: CODAR seasonde experience on the West Florida Shelf. J. Atmos. Ocean. Technol. 2010, 27, 1689–1710. [Google Scholar] [CrossRef]
- Liu, J.Y.; Chen, Y.I.; Chuo, Y.J.; Chen, C.S. A statistical investigation of preearthquakeionospheric anomaly. J. Geophys. Res. 2006, 111, A05304. [Google Scholar]
- Xu, T.; Hu, Y.L.; Wu, J.; Wu, Z.S.; Li, C.B.; Xu, Z.W.; Suo, Y.C. Anomalous enhancement of electric field derived from ionosonde data before the great Wenchuan earthquake. Adv. Space Res. 2011, 47, 1001–1005. [Google Scholar] [CrossRef]
- Zhao, B.Q.; Wang, M.; Yu, T.; Wan, W.X.; Lei, J.H.; Liu, L.B.; Ning, B.Q. Is an unusual large enhancement of ionospheric electron density linked with the 2008 great Wenchuan earthquake? J. Geophys. Res. 2008, 113, A11304. [Google Scholar] [CrossRef]
- Pulinets, S.A.; Legen’ka, A.D.; Gaivoronskaya, T.V.; Depuev, V.K. Main phenomenological features of ionospheric precursors of strong earthquakes. J. Atmos. Sol. Terr. Phys. 2003, 65, 1337–1347. [Google Scholar] [CrossRef]
- Zhao, Z.Y.; Zhang, Y.N.; Chen, G. Comprehensive ionospheric monitoring for earthquake precursor. Recent Dev. World Seismol. 2009, 7, 35–38. [Google Scholar]
- Liu, J.; Jiang, C.H.; Deng, C.; Yang, G.B.; Zhang, X.M.; Lou, W.Y.; Yang, C.H. Vertical ionosonde net and its data application in southwestern China. ActaSeismol. Sin. 2016, 38, 399–407. [Google Scholar]
- Ivanov, V.A.; Ryabova, N.V.; Shumaev, V.V.; Uryadov, V.P. Forecasting and updating HF channel parameters on the basis of oblique chirp sounding. Radio Sci. 1997, 32, 983–988. [Google Scholar] [CrossRef]
- Pietrella, M.; Perrone, L.; Fontana, G.; Romano, V.; Malagnini, A.; Tutone, G.; Zolesi, B.; Cander, L.R.; Belehaki, A.; Tsagouri, I.; et al. Oblique-incidence ionospheric soundings over Central Europe and their application for testing now casting and long term prediction models. Adv. Space Res. 2009, 43, 1611–1620. [Google Scholar] [CrossRef]
- Zhou, C.; Wang, R.P.; Lou, W.Y.; Liu, J.; Ni, B.B.; Deng, Z.X.; Zhao, Z.Y. Preliminary investigation of real-time mapping of f0F2 in northern China based on oblique ionosonde data. J. Geophys. Res. Space Phys. 2013, 118, 2536–2544. [Google Scholar] [CrossRef]
- Zhou, C.; Zhao, Z.Y.; Deng, F.; Ni, B.B.; Chen, G. Midlatitudeionospheric HF channel reciprocity: Evidence from the ionospheric oblique incidence sounding experiments. Radio Sci. 2010, 45, RS6017. [Google Scholar] [CrossRef]
- Fabrizio, G.; Heitmann, A. A multipath-driven approach to HF geolocation. Signal Process. 2013, 93, 3487–3503. [Google Scholar] [CrossRef]
- Lai, K. A real-time HF single-station location system development. In Proceedings of the 2008 International Conference on Radar, Adelaide, Australia, 2–5 September 2008; pp. 307–310. [Google Scholar]
- Zhu, P.; Zhang, Y.N.; Yang, G.B.; Zhou, C.; Jiang, C.H.; Cui, X. Development of backscatter sounding single-site location system. IET Radar Sonar Navig. 2016, 10, 632–636. [Google Scholar] [CrossRef]
- Zhao, Z.; Wan, X.; Zhang, D.; Cheng, F. An experimental study of HF passive bistatic radar via hybrid sky-surface wave mode. IEEE Trans. Antennas Propag. 2013, 61, 415–424. [Google Scholar] [CrossRef]
- Li, Y.; Wei, Y.; Zhu, Y.; Wang, Z.; Xu, R. Cascaded method for ionospheric decontamination and sea clutter suppression for high-frequency hybrid sky-surface wave radar. IET Radar Sonar Navig. 2015, 9, 562–571. [Google Scholar] [CrossRef]
- Cui, X.; Gong, W.L.; Ye, X.Q.; Pan, L.Y.; Chen, Y.P. Application of Wuhan ionospheric oblique backscattering sounding system (WIOBSS) for sea-state detection. IEEE Geosci. Remote Sens. Lett. 2016, 13, 389–393. [Google Scholar] [CrossRef]
- Merz, C.R.; Liu, Y.; Gurgel, K.-W.; Petersen, L.; Weisberg, R.H. Effect of radio frequency interference (RFI) noise energy on WERA performance using the “listen before talk” adaptive noise procedure on the West Florida shelf. In Coastal Ocean Observing Systems: Advances and Syntheses; Elsevier: Amsterdam, The Netherlands, 2015; pp. 229–247. [Google Scholar]
- Chen, G.; Zhao, Z.Y.; Li, T.; Nie, X.D. An experiment investigation for the detection of airplane target by high frequency radar. J. Wuhan Univ. Nat. Sci. Ed. 2011, 57, 231–235. [Google Scholar] [CrossRef]
- Wu, M.Q. Digital array radar: Technology and trends. In Proceedings of the 2011 IEEE CIE International Conference on Radar, Chengdu, China, 24–27 October 2011; Volume 1, pp. 1–4. [Google Scholar]
- Nguyen, H.Q.; Whittington, J.S.; Devlin, J.C.; Vu, H.L.; Vu, N.V.; Custovi, E. Accurate phase calibration for digital beam-forming in multi-transceiver HF radar system. Int. J. Electron. Telecommun. 2013, 59, 245–254. [Google Scholar] [CrossRef]
- Parkinson, M.L.; Whittington, J.S.; Devlin, J.C. Why do we need “DigiDARN”—A global network of digital SuperDARN radars? In Proceedings of the WARS’06 (Workshop on Applications of Radio Science), Leura, Australia, 15–17 February 2006.
- Fishler, E.; Haimovich, A.; Blum, R.; Chizhik, D.; Cimini, L.; Valenzuela, R. MIMO radar: An idea whose time has come. In Proceedings of the IEEE Radar Conference, Philadelphia, PA, USA, 26–29 April 2004; pp. 71–78. [Google Scholar]
- Gao, C.; Zhou, H.; Wu, R.; Xu, X.; Shen, F.; Guo, Z. Parameter estimation and multi-pulse target detection of MIMO radar. In Proceedings of the 2016 IEEE Region 10 Conference, Singapore, 22–25 November 2016; pp. 909–914. [Google Scholar]
- Riddolls, R.J.; Ravan, M.; Adve, R.S. Canadian HF over-the-horizon radar experiments using MIMO techniques to control auroral clutter. In Proceedings of the 2010 IEEE Radar Conference: Global Innovation in Radar, Washington, DC, USA, 10–14 May 2010; pp. 718–723. [Google Scholar]
- Frazer, G.J.; Abramovich, Y.I.; Johnson, B.A. HF skywave MIMO radar: The HILOW experimental program. In Proceedings of the 2008 42nd Asilomar Conference on Signals, Systems and Computers, Pacific Grove, CA, USA, 26–29 October 2008; pp. 639–643. [Google Scholar]
- Frazer, G.J.; Abramovich, Y.I.; Johnson, B.A. Multiple-input multiple-output over-the-horizon radar: Experimental results. IET Radar Sonar Navig. 2009, 3, 290–303. [Google Scholar] [CrossRef]
- Abramovich, Y.I.; Frazer, G.J.; Johnson, B.A. Principles of mode-selective MIMO radar. IEEE Trans. Aerosp. Electron. Syst. 2013, 49, 1839–1868. [Google Scholar] [CrossRef]
- Tomei, S.; Martorella, M.; Coleman, C.J.; Berizzi, F. Propagation effects on high frequency skywave multiple-input-multiple-output radar. IET Radar Sonar Navig. 2015, 9, 1303–1313. [Google Scholar] [CrossRef]
- Reinisch, B.W. New techniques in ground-based ionospheric sounding and studies. Radio Sci. 1986, 21, 331–341. [Google Scholar] [CrossRef]
- Earle, G.D.; Bhaneja, P.; Roddy, P.A.; Swenson, C.M.; Barjatya, A.; Bishop, R.L.; Bullett, T.W.; Crowley, G.; Redmon, R.; Groves, K.; et al. A comprehensive rocket and radar study of midlatitude spread F. J. Geophys. Res. 2010, 115, A12339. [Google Scholar] [CrossRef]
- Chen, Y.P.; Yang, G.B.; Ni, B.B.; Zhao, Z.Y.; Gu, X.D.; Zhou, C.; Wang, F. Development of ground-based ELF/VLF receiver system in Wuhan and its first results. Adv. Space Res. 2016, 57, 1871–1880. [Google Scholar] [CrossRef]
- Zhao, Z.Y.; Zhou, C.; Qing, H.Y.; Yang, G.B.; Zhang, Y.N.; Chen, G.; Hu, Y.G. Wuhan atmosphere radio exploration (WARE) radar: System design and online winds measurements. Radio Sci. 2013, 48, 326–333. [Google Scholar]
- Fabrizio, G.; Colone, F.; Lombardo, P.; Farina, A. Passive radar in the high frequency band. In Proceedings of the 2008 IEEE Radar Conference, Rome, Italy, 26–30 May 2008. [Google Scholar]
- Thomas, J.M.; Baker, C.J.; Griffiths, H.D. HF passive bistatic radar potential and applications for remote sensing. In Proceedings of the New Trends for Environmental Monitoring Using Passive Systems, Hyeres, France, 14–17 October 2008. [Google Scholar]
- Sahr, J.D.; Lind, F.D. The Manastash Ridge radar: A passive bistatic radar for upper atmospheric radio science. Radio Sci. 1997, 32, 2345–2358. [Google Scholar] [CrossRef]
- Sahr, J.D.; Meyer, M. Opportunities for passive VHF radar studies of plasma irregularities in the equatorial E and F regions. J. Atmos. Sol. Terr. Phys. 2004, 66, 1675–1681. [Google Scholar] [CrossRef]
- Ganguly, S.; Wickwar, V.; Goodman, J.M. Next generation topside sounder. Radio Sci. 2001, 36, 1167–1179. [Google Scholar] [CrossRef]
- Nemec, F.; Morgan, D.D.; Gurnett, D.A.; Duru, F. Nightside ionosphere of Mars: Radar soundings by the Mars Express spacecraft. J. Geophys. Res. 2010, 115, E12009. [Google Scholar] [CrossRef]
- Fouquet, M.; Sweeting, M. UoSAT-12 minisatellite for high performance earth observation at low cost. Acta Astronaut. 1997, 41, 173–182. [Google Scholar] [CrossRef]
- Yao, M. The Research of the Spaceborne Multi-Function Plasma Sounding System and Its Waveform Technology. Ph.D. Thesis, Wuhan University, Wuhan, China, 2010. [Google Scholar]




{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Item | Inter-Pulse Binary Phase-Coded Waveform | Intra-Pulse Binary Phase-Coded Waveform | LFMCW | Combined Waveform |
|---|---|---|---|---|
| Unambiguous delay detection range | ||||
| Delay resolution | ||||
| Unambiguous Doppler detection range | / | |||
| Doppler resolution | 1 | 2 | ||
| Ideal pulse compression gain(dB) | 20log10(L) | 20log10(L) | 20log10(BTp) | 20log10(BTp)+20log10(L) |
| Blind zones | 3 | / | 3 |
© 2017 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Shi, S.; Yang, G.; Jiang, C.; Zhang, Y.; Zhao, Z. Wuhan Ionospheric Oblique Backscattering Sounding System and Its Applications—A Review. Sensors 2017, 17, 1430. https://doi.org/10.3390/s17061430
Shi S, Yang G, Jiang C, Zhang Y, Zhao Z. Wuhan Ionospheric Oblique Backscattering Sounding System and Its Applications—A Review. Sensors. 2017; 17(6):1430. https://doi.org/10.3390/s17061430
Chicago/Turabian StyleShi, Shuzhu, Guobin Yang, Chunhua Jiang, Yuannong Zhang, and Zhengyu Zhao. 2017. "Wuhan Ionospheric Oblique Backscattering Sounding System and Its Applications—A Review" Sensors 17, no. 6: 1430. https://doi.org/10.3390/s17061430
APA StyleShi, S., Yang, G., Jiang, C., Zhang, Y., & Zhao, Z. (2017). Wuhan Ionospheric Oblique Backscattering Sounding System and Its Applications—A Review. Sensors, 17(6), 1430. https://doi.org/10.3390/s17061430