A Synergy Cropland of China by Fusing Multiple Existing Maps and Statistics


Abstract
:1. Introduction
2. Data and Method
2.1. Data Sources
2.2. Data Processing
2.3. Methodology
3. Results and Analysis
3.1. Agreement Analysis and Accuracy Assessment of the Five Cropland Datasets
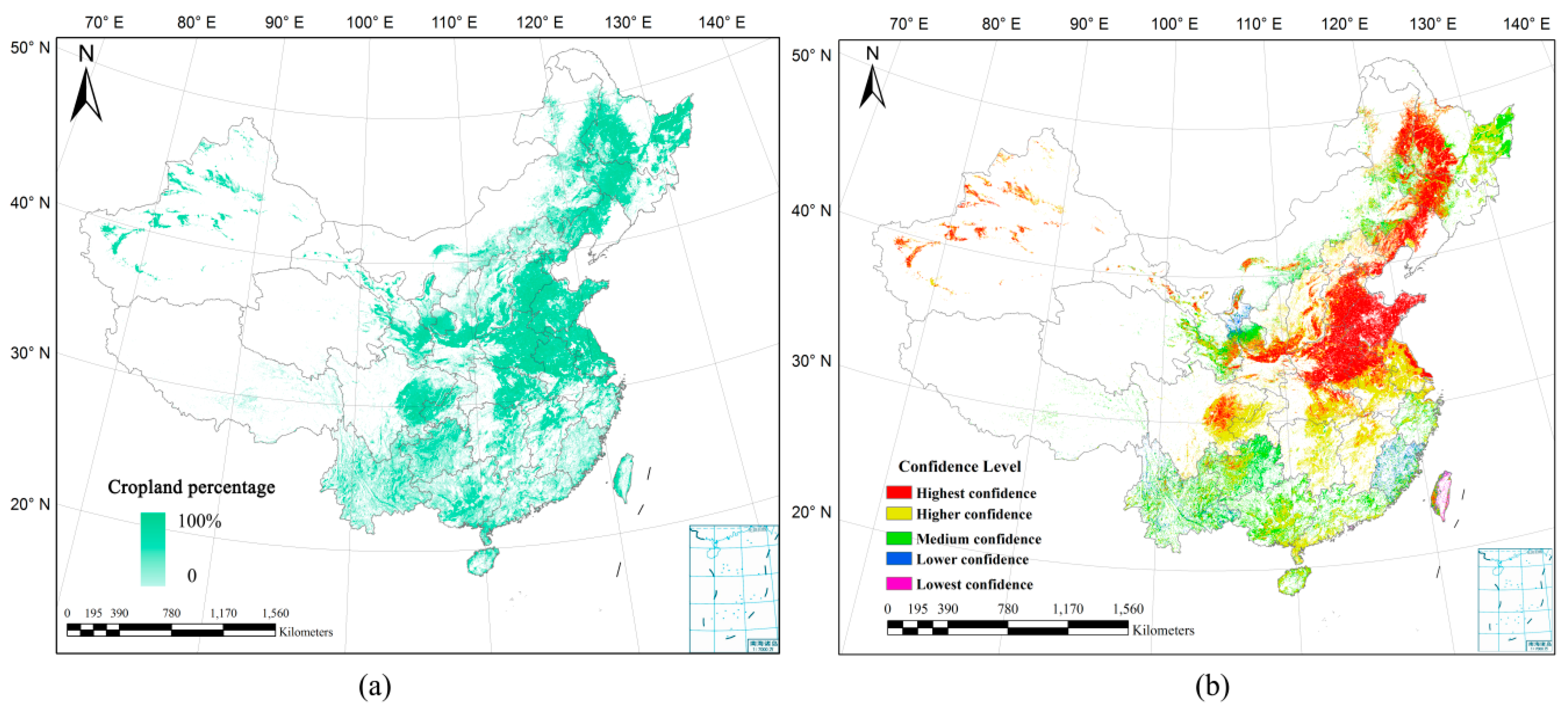
3.2. Cropland Map Developed by HOSA
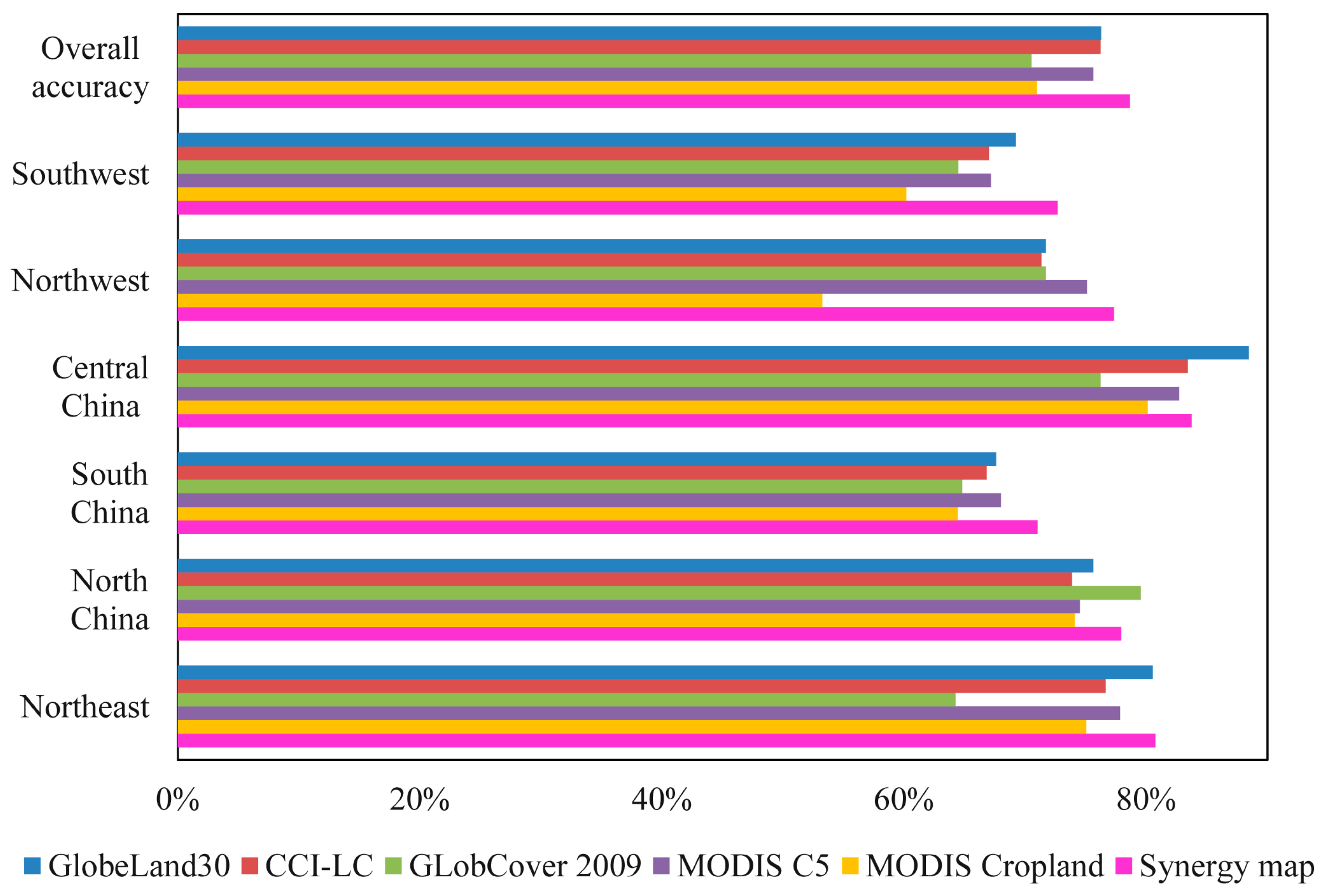
3.3. Accuracy Assessment
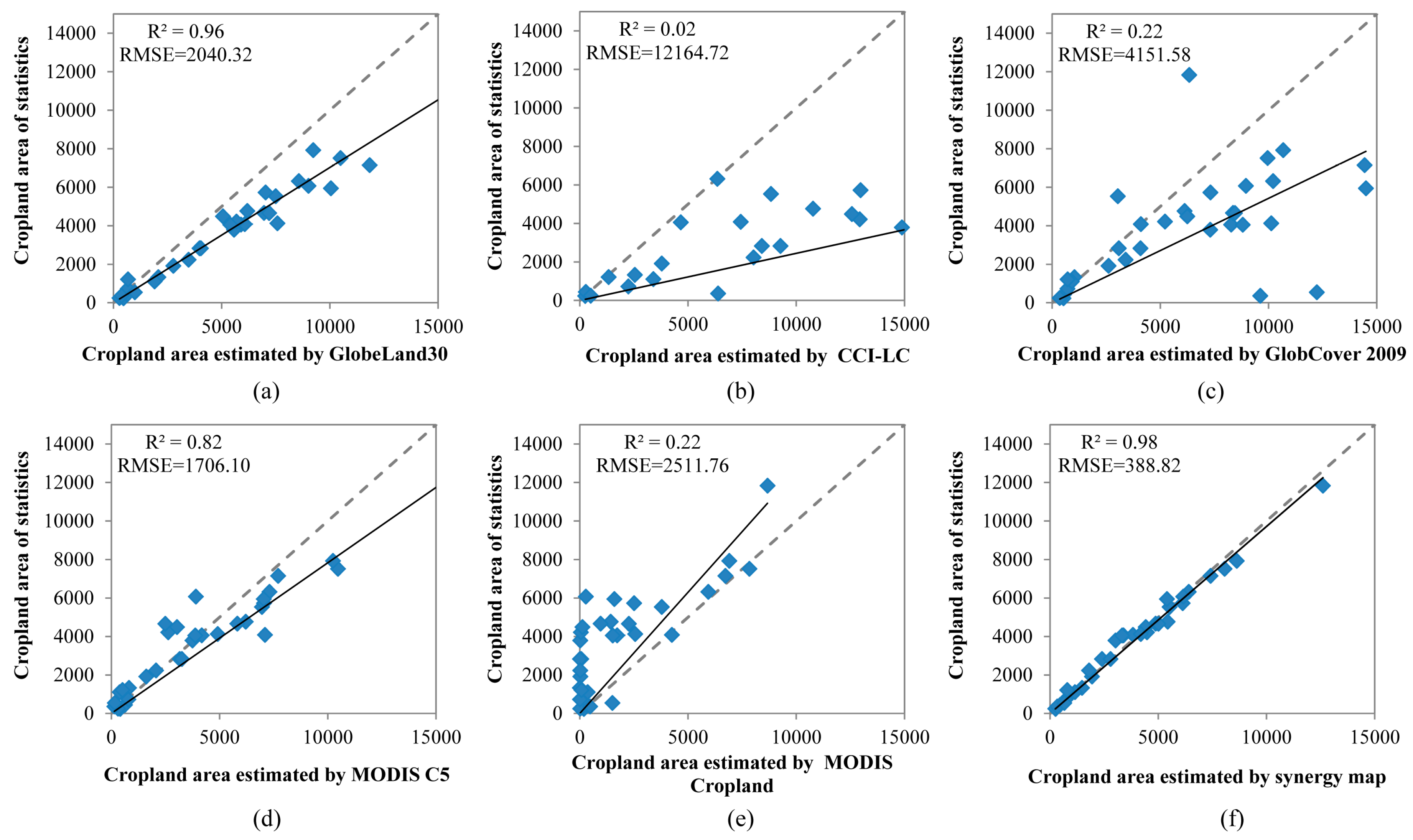
3.4. Comparison with Statistics
4. Discussion
5. Conclusions
Acknowledgments
Author Contributions
Conflicts of Interest
References
- Saghir, J. Global challenges in agriculture and the World Bank’s response in Africa. Food Energy Secur. 2014, 3, 61–68. [Google Scholar] [CrossRef]
- Godfray, H.C.; Crute, I.R.; Haddad, L.; Lawrence, D.; Muir, J.F.; Nisbett, N.; Pretty, J.; Robinson, S.; Toulmin, C.; Whiteley, R. The future of the global food system. Philos. Trans. R. Soc. Lond. B Biol. Sci. 2010, 365, 2769–2777. [Google Scholar] [CrossRef] [PubMed]
- Kearney, J. Food consumption trends and drivers. Philos. Trans. R. Soc. Lond. B Biol. Sci. 2010, 365, 2793–2807. [Google Scholar] [CrossRef] [PubMed]
- Bontemps, S.; Herold, M.; Kooistra, L.; van Groenestijn, A.; Hartley, A.; Arino, O.; Moreau, I.; Defourny, P. Revisiting land cover observation to address the needs of the climate modeling community. Biogeosciences 2012, 9, 2145–2157. [Google Scholar] [CrossRef]
- Yang, J.; Gong, P.; Fu, R.; Zhang, M.; Chen, J.; Liang, S.; Xu, B.; Shi, J.; Dickinson, R. The role of satellite remote sensing in climate change studies. Nat. Clim. Chang. 2013, 3, 875–883. [Google Scholar] [CrossRef]
- Fritz, S.; See, L.; You, L.; Justice, C.; Becker-Reshef, I.; Bydekerke, L.; Cumani, R.; Defourny, P.; Erb, K.; Foley, J.; et al. The need for improved maps of global cropland. Eos Trans. AGU 2013, 94, 31–32. [Google Scholar] [CrossRef]
- You, L.; Spoor, M.; Ulimwengu, J.; Zhang, S. Land use change and environmental stress of wheat, rice and corn production in china. China Econ. Rev. 2011, 22, 461–473. [Google Scholar] [CrossRef]
- Loveland, T.R.; Reed, B.C.; Brown, J.F.; Ohlen, D.O.; Zhu, Z.; Yang, L.; Merchant, J.W. Development of a global land cover characteristics database and IGBP DISCover from 1 km AVHRR data. Int. J. Remote Sens. 2000, 21, 1303–1330. [Google Scholar] [CrossRef]
- Hansen, M.C.; Defries, R.S.; Townshend, J.R.G.; Sohlberg, R. Global land cover classification at 1 km spatial resolution using a classification tree approach. Int. J. Remote Sens. 2000, 21, 1331–1364. [Google Scholar] [CrossRef]
- Bartholome, E.; Belward, A.S. GLC2000: A new approach to global land cover mapping from Earth observation data. Int. J. Remote Sens. 2005, 26, 1959–1977. [Google Scholar] [CrossRef]
- Friedl, M.A.; Sulla-Menashe, D.; Tan, B.; Schneider, A.; Ramankutty, N.; Sibley, A.; Ramankutty, N.; Sibley, A.; Huang, X. MODIS collection 5 global land cover: Algorithm refinements and characterization of new datasets. Remote Sens. Environ. 2010, 114, 168–182. [Google Scholar] [CrossRef]
- Bontemps, S.; Defourny, P.; Bogaert, E.V.; Arino, O.; Kalogirou, V.; Perez, J.R. GLOBCOVER 2009. Products Description and Validation Report. Available online: https://core.ac.uk/download/pdf/11773712.pdf (accessed on 30 April 2017).
- Chen, J.; Jin, C.; Liao, A.; Xin, C.; Chen, L.; Chen, X.; He, C.; Han, G.; Peng, S.; Lu, M.; et al. Global land cover mapping at 30 m resolution: a POK-based operational approach. ISPRS J. Photogramm. Remote Sens. 2015, 103, 7–27. [Google Scholar] [CrossRef]
- Gong, P.; Wang, J.; Yu, L.; Zhao, Y.; Zhao, Y.; Liang, L.; Niu, Z.; Huang, X.; Fu, H.; Liu, S.; et al. Finer resolution observation and monitoring of GLC: First mapping results with Landsat TM and ETM+ data. Int. J. Remote Sens. 2013, 34, 2607–2654. [Google Scholar] [CrossRef]
- Herold, M.; Mayaux, P.; Woodcock, C.E.; Baccini, A.; Schmullius, C. Some challenges in global land cover mapping: An assessment of agreement and accuracy in existing 1 km datasets. Remote Sens. Environ. 2008, 112, 2538–2556. [Google Scholar] [CrossRef]
- Tchuenté, A.T.K.; Roujean, J.L.; Jong, S.M.D. Comparison and relative quality assessment of the GLC2000, GLOBCOVER, MODIS and ECOCLIMAP land cover data sets at the African continental scale. Int. J. Appl. Earth Obs. 2011, 13, 207–219. [Google Scholar] [CrossRef]
- Wu, W.; Shibasaki, R.; Yang, P.; Zhou, Q.; Tang, H. Remotely sensed estimation of cropland in China: A comparison of the maps derived from four global land cover datasets. Can. J. Remote Sens. 2008, 34, 467–479. [Google Scholar] [CrossRef]
- Congalton, R.G.; Gu, J.; Yadav, K.; Ozdogan, M. Global land cover mapping: A review and uncertainty analysis. Remote Sens. 2014, 6, 12070–12093. [Google Scholar] [CrossRef]
- Lu, M.; Wu, W.; Zhang, L.; Liao, A.; Peng, S.; Tang, H. A comparative analysis of five global cropland datasets in china. Sci. China Earth Sci. 2016, 59, 2307–2317. [Google Scholar] [CrossRef]
- Liang, L.; Gong, P. Evaluation of global land cover maps for cropland area estimation in the conterminous united states. Int. J. Digit. Earth 2015, 8, 102–117. [Google Scholar] [CrossRef]
- Yu, L.; Wang, J.; Clinton, N.; Xin, Q.; Zhong, L.; Chen, Y.; Gong, P. From-GC: 30 m global cropland extent derived through multisource data integration. Int. J. Digit. Earth 2013, 6, 521–533. [Google Scholar] [CrossRef]
- Verburg, P.H.; Neumann, K.; Nol, L. Challenges in using land use and land cover data for global change studies. Glob. Chang. Biol. 2011, 17, 974–989. [Google Scholar] [CrossRef]
- Brunsdon, C.; Fotheringham, A.S.; Charlton, M.E. Geographically Weighted Regression: A Method for Exploring Spatial Nonstationarity. Geogr. Anal. 1996, 28, 281–298. [Google Scholar] [CrossRef]
- See, L.; Schepaschenko, D.; Lesiv, M.; Mccallum, I.; Fritz, S.; Comber, A.; Perger, C.; Schill, C.; Zhao, Y.; Maus, V.; et al. Building a hybrid land cover map with crowdsourcing and geographically weighted regression. ISPRS J. Photogramm. Remote Sens. 2014, 103, 48–56. [Google Scholar] [CrossRef]
- Schepaschenko, D.; See, L.; Lesiv, M.; Mccallum, I.; Fritz, S.; Salk, C.; Moltchanova, E.; Perger, C.; Shchepashchenko, M.; Shvidenko, A.; et al. Development of a global hybrid forest mask through the synergy of remote sensing, crowdsourcing and FAO statistics. Remote Sens. Environ. 2015, 162, 208–220. [Google Scholar] [CrossRef]
- Chen, G.; Zhao, K.; McDermid, G.J.; Hay, G.J. The influence of sampling density on geographically weighted regression: A case study using forest canopy height and optical data. Int. J. Remote Sens. 2012, 33, 2909–2924. [Google Scholar] [CrossRef]
- Lu, B.; Charlton, M.; Harris, P.; Fotheringham, A.S. Geographically weighted regression with a non-euclidean distance metric: A case study using hedonic house price data. Int. J. Geogr. Inf. Sci. 2014, 28, 660–681. [Google Scholar] [CrossRef]
- Jung, M.; Henkel, K.; Herold, M.; Churkina, G. Exploiting synergies of global land cover products for carbon cycle modeling. Remote Sens. Environ. 2006, 101, 534–553. [Google Scholar] [CrossRef]
- Ramankutty, N.; Evan, A.T.; Monfreda, C.; Foley, J.A. Farming the planet: 1. geographic distribution of global agricultural lands in the year 2000. Glob. Biogeochem. Cycles 2008, 22, 567–568. [Google Scholar] [CrossRef]
- Fritz, S.; You, L.; Bun, A.; See, L.; Mccallum, I.; Schill, C.; Perger, C.; Liu, J.; Hansen, M.; Obersteiner, M. Cropland for sub-saharan Africa: A synergistic approach using five land cover data sets. Geophys. Res. Lett. 2011, 38, 155–170. [Google Scholar] [CrossRef]
- Fritz, S.; See, L.; Mccallum, I.; You, L.; Bun, A.; Moltchanova, E.; Duerauer, M.; Albrecht, F.; Schill, C.; Perger, C.; et al. Mapping global cropland and field size. Glob. Chang. Biol. 2014, 21, 1980–1992. [Google Scholar] [CrossRef] [PubMed]
- Defourny, P.; Kirches, G.; Brockmann, C.; Boettcher, M.; Peters, M.; Bontemps, S.; Lamarche, C.; Schlerf, M.; Santoro, M. Land Cover CCI: Product User Guide Version 2. Available online: http://maps.elie.ucl.ac.be/CCI /viewer /download/ESACCI-LC-PUG-v2.5.pdf (accessed on 30 April 2017).
- Pittman, K.; Hansen, M.C.; Beckerreshef, I.; Potapov, P.V.; Justice, C.O. Estimating global cropland extent with multi-year MODIS data. Remote Sens. 2010, 2, 1844–1863. [Google Scholar] [CrossRef]
- Lu, M.; Chen, J.; Tang, H.; Rao, Y.; Yang, P.; Wu, W. Land cover change detection by integrating object-based data blending model of Landsat and MODIS. Remote Sens. Environ. 2016, 184, 374–386. [Google Scholar] [CrossRef]
- Hussain, M.; Chen, D.; Cheng, A.; Wei, H.; Stanley, D. Change detection from remotely sensed images: From pixel-based to object-based approaches. ISPRS J. Photogramm. Remote Sens. 2013, 80, 91–106. [Google Scholar] [CrossRef]
- Yang, Y.; Xiao, P.; Feng, X.; Li, H. Accuracy assessment of seven global land cover datasets over China. ISPRS J. Photogramm. Remote Sens. 2017, 125, 156–173. [Google Scholar] [CrossRef]
- Bey, A.; Sánchez-Paus Díaz, A.; Maniatis, D.; Marchi, G.; Mollicone, D.; Ricci, S.; Bastin, J.; Moore, R.; Federici, S.; Rezende, M.; et al. Collect Earth: Land Use and Land Cover Assessment through Augmented Visual Interpretation. Remote Sens. 2016, 8, 807. [Google Scholar] [CrossRef]
- Fritz, S.; McCallum, I.; Schill, C.; Perger, C.; Grillmayer, R.; Achard, F.; Kraxner, F.; Obersteiner, M. Geo-Wiki.Org: The use of crowdsourcing to improve global land cover. Remote Sens. 2009, 1, 345–354. [Google Scholar] [CrossRef]
- See, L.; Perger, C.; Hofer, M.; Weichselbaumb, J.; Dresel, C.; Fritz, S. LACO-Wiki: An open access online 591 portal for land cover validation. ISPRS Ann. Photogramm. Remote Sens. Spat. Inf. Sci. 2015, II-3/W5, 167–171. [Google Scholar] [CrossRef]
- Comber, A.; Brunsdon, C.; Charlton, M.; Harris, P. Geographically weighted correspondence matrices for local error reporting and change analyses: Mapping the spatial distribution of errors and change. Remote Sens. Lett. 2017, 8, 234–243. [Google Scholar] [CrossRef]
- Comber, A.; Fisher, P.; Brunsdon, C.; Khmag, A. Spatial analysis of remote sensing image classification accuracy. Remote Sens. Environ. 2012, 127, 237–246. [Google Scholar] [CrossRef]











{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Dataset | Spatial Resolution | Sensor | Epoch | Classification Method |
|---|---|---|---|---|
| GlobeLand30 | 30 m | Landsat TM/HJ-1 | 2010 | POK |
| CCI-LC | 300 m | MERIS | 2008–2012 | Unsupervised/supervised clustering |
| GlobCover 2009 | 300 m | MERIS | 2009 | Unsupervised/supervised clustering |
| MODIS C5 | 500 m | MODIS | 2010 | Decision tree classification |
| MODIS Cropland | 250 m | MODIS | 2000–2008 | Decision tree classification |
| Dataset | Definition of Cropland | Cropland Accuracy Released by Producer | Cropland Percentage |
|---|---|---|---|
| GlobeLand30 | Cultivated land | 80.33% | 100% |
| CCI-LC | Cropland, rainfed | 85% | 100% |
| Herbaceous cover | __ | 80% | |
| Tree or shrub cover | __ | 80% | |
| Cropland, irrigated or post-flooding | 88% | 100% | |
| Mosaic cropland (>50%)/natural vegetation (tree, shrub, herbaceous cover) (<50%) | 68% | 60% | |
| Mosaic natural vegetation (tree, shrub, herbaceous cover) (>50%)/cropland (<50%) | 63% | 40% | |
| GlobCover 2009 | Post-flooding or irrigated croplands (or aquatic) | 88% | 100% |
| Rainfed croplands | 81% | 100% | |
| Mosaic cropland (50–70%)/vegetation (20–50%) | 64% | 60% | |
| Mosaic vegetation (50–70%)/cropland (20–50%) | 46% | 40% | |
| MODIS C5 | Cropland | 83.3% | 100% |
| Cropland/natural vegetation mosaics | 60.5% | 60% | |
| MODIS Cropland | Cropland | __ | 100% |
| Score | #1 | #2 | #3 | #4 | #5 |
|---|---|---|---|---|---|
| 10 | 1 | 1 | 1 | 0 | 0 |
| 9 | 1 | 1 | 0 | 1 | 0 |
| 8 | 1 | 0 | 1 | 1 | 0 |
| 7 | 0 | 1 | 1 | 1 | 0 |
| 6 | 1 | 1 | 0 | 0 | 1 |
| 5 | 1 | 0 | 1 | 0 | 1 |
| 4 | 0 | 1 | 1 | 0 | 1 |
| 3 | 1 | 0 | 0 | 1 | 1 |
| 2 | 0 | 1 | 0 | 1 | 1 |
| 1 | 0 | 0 | 1 | 1 | 1 |
| Validation Samples | |||||
|---|---|---|---|---|---|
| Cropland | Noncropland | Sum | Commission Error | ||
| Synergy map | Cropland | 1111 | 311 | 1422 | 21.87% |
| Noncropland | 292 | 1110 | 1402 | 20.83% | |
| Sum | 1403 | 1421 | 2824 | ||
| Omission error | 20.81% | 21.89% | |||
| Overall accuracy = 78.65%, Kappa coefficient = 0.57 | |||||
| GlobeLand30 | CCI-LC | GlobCover 2009 | MODIS C5 | MODIS Cropland | Synergy Map | |
|---|---|---|---|---|---|---|
| AD (ha) | 1585.11 | 8342.77 | 2357.00 | 499.88 | –1895.28 | 12.02 |
| AARD | 0.45 | 3.50 | 2.00 | 0.32 | 0.65 | 0.09 |
© 2017 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Lu, M.; Wu, W.; You, L.; Chen, D.; Zhang, L.; Yang, P.; Tang, H. A Synergy Cropland of China by Fusing Multiple Existing Maps and Statistics. Sensors 2017, 17, 1613. https://doi.org/10.3390/s17071613
Lu M, Wu W, You L, Chen D, Zhang L, Yang P, Tang H. A Synergy Cropland of China by Fusing Multiple Existing Maps and Statistics. Sensors. 2017; 17(7):1613. https://doi.org/10.3390/s17071613
Chicago/Turabian StyleLu, Miao, Wenbin Wu, Liangzhi You, Di Chen, Li Zhang, Peng Yang, and Huajun Tang. 2017. "A Synergy Cropland of China by Fusing Multiple Existing Maps and Statistics" Sensors 17, no. 7: 1613. https://doi.org/10.3390/s17071613
APA StyleLu, M., Wu, W., You, L., Chen, D., Zhang, L., Yang, P., & Tang, H. (2017). A Synergy Cropland of China by Fusing Multiple Existing Maps and Statistics. Sensors, 17(7), 1613. https://doi.org/10.3390/s17071613