Position, Orientation and Velocity Detection of Unmanned Underwater Vehicles (UUVs) Using an Optical Detector Array

 ,
, 
Abstract
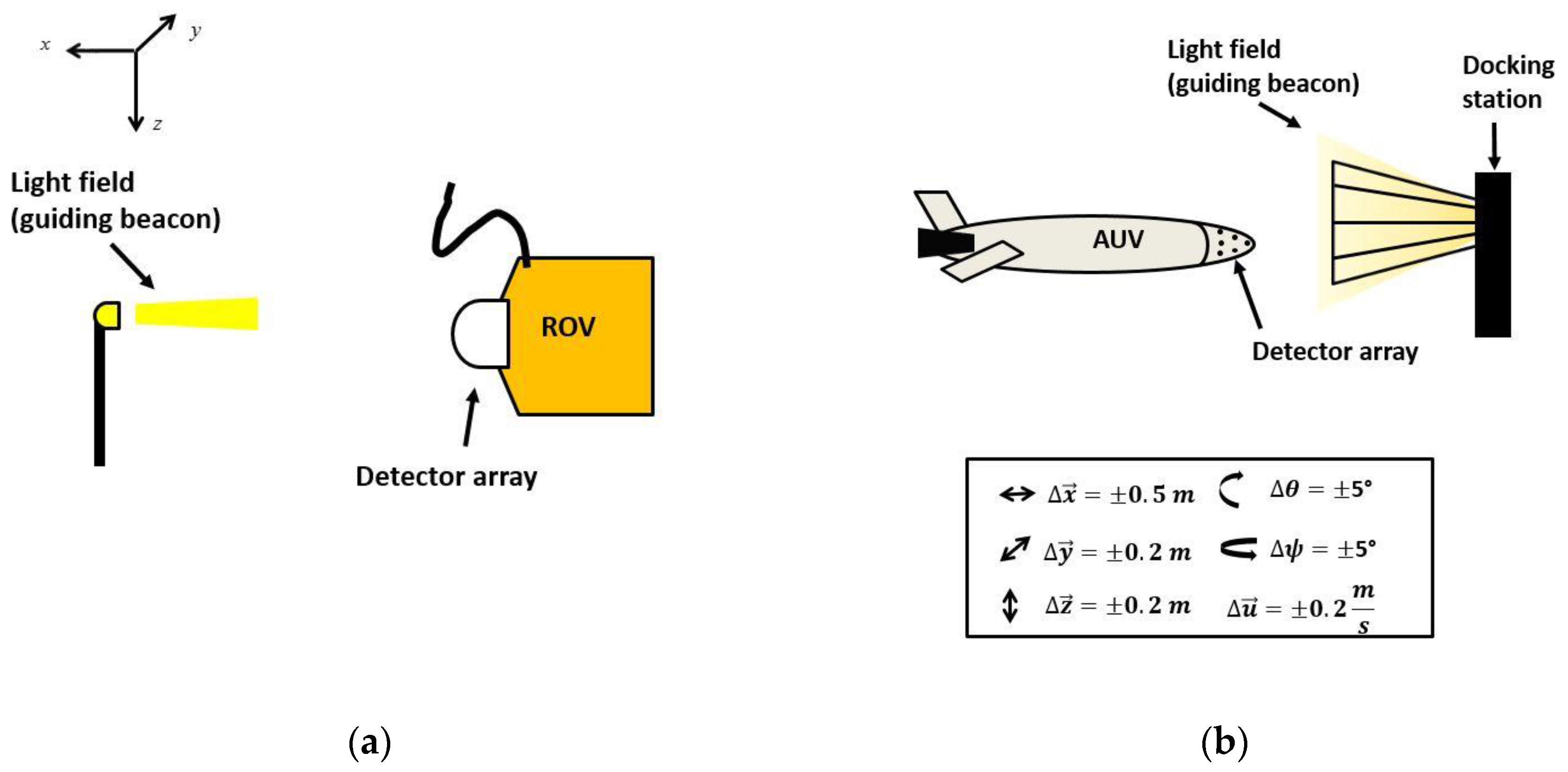
:1. Introduction
2. Materials and Methods
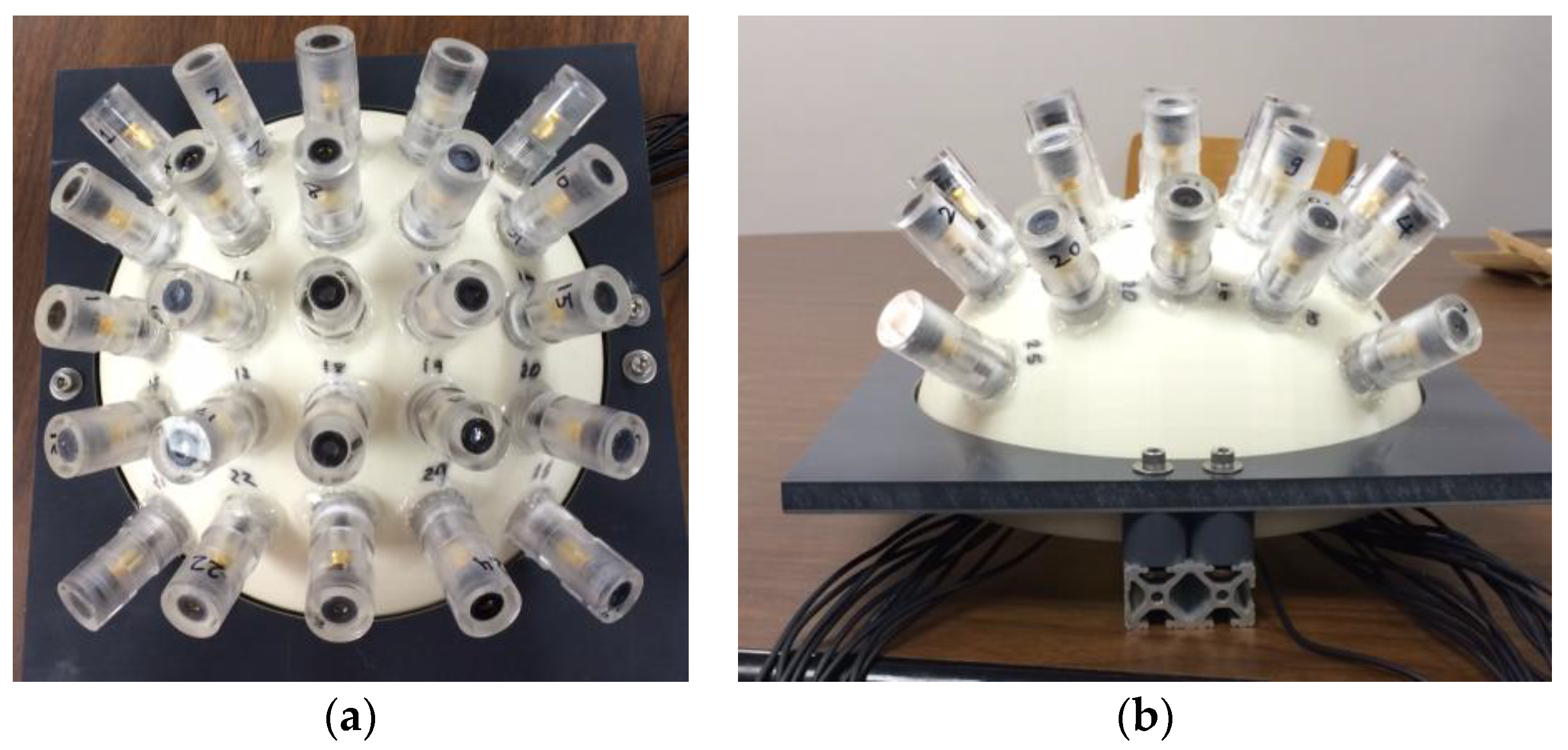
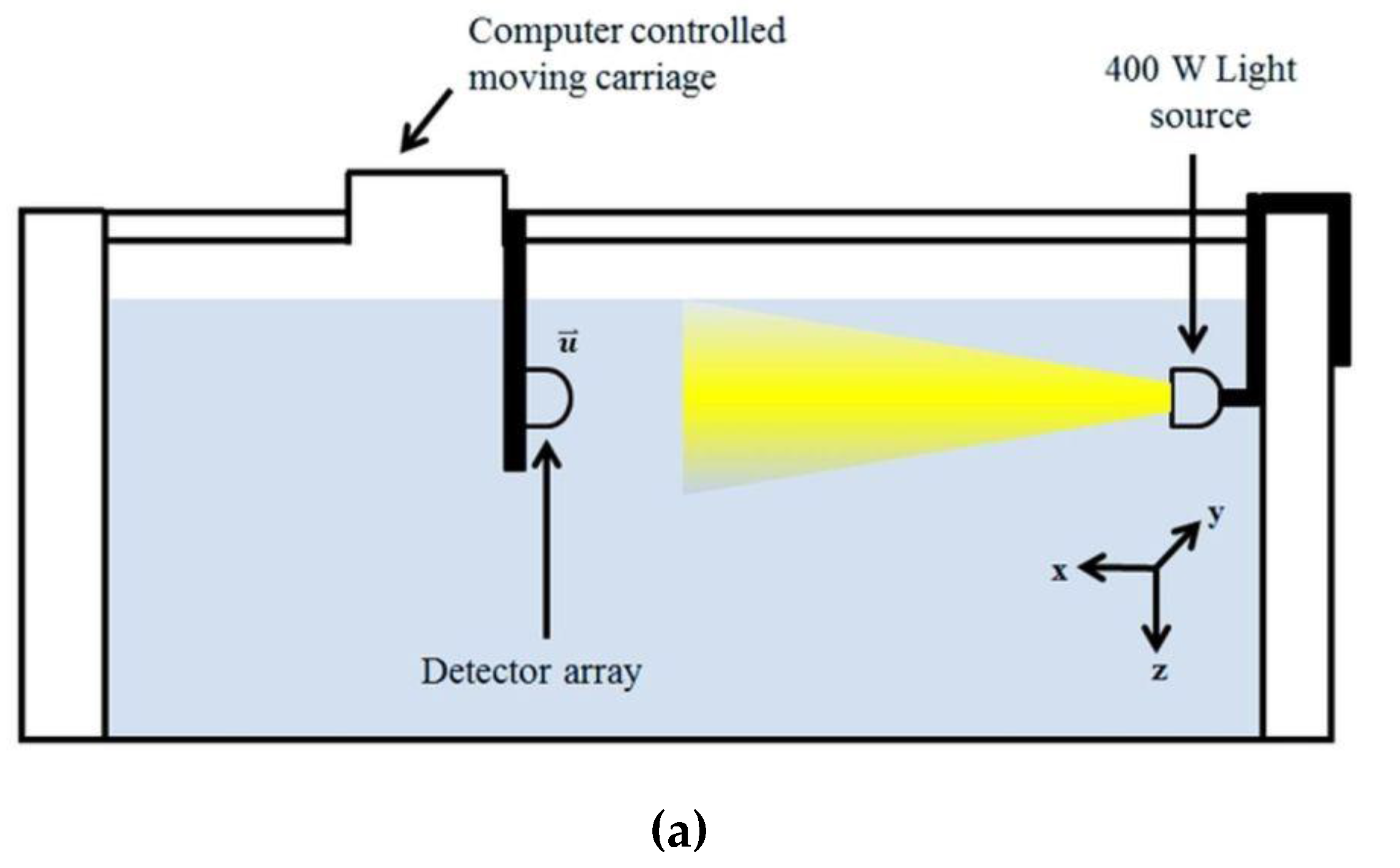
2.1. Hardware Design and the Optical Detector Array Output
2.2. Calibration Procedures and the Pose Detection Algorithm
2.2.1. Geometrical Calibration and the Pose Detection Algorithm
| Algorithm 1. Pose Estimation |
| Obtain the image sampled on the detector array |
| Compute , , , and |
| Update based on , and |
| Update based on , and |
| Return , , , and |
2.2.2. Photodiode Response to Temperature Variations
2.2.3. Hardware and System Cross-Talk
3. Results
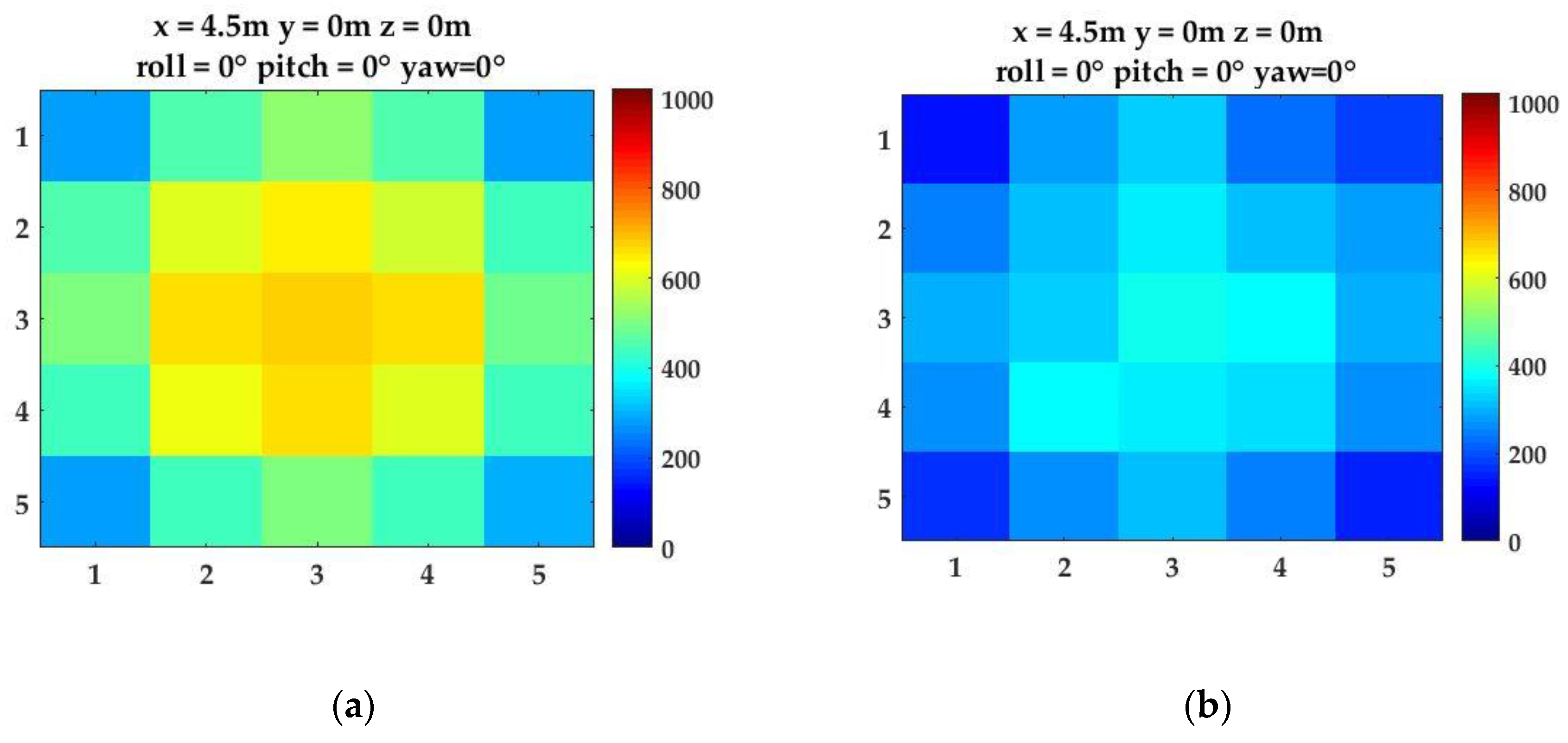
3.1. Monte Carlo Simulations
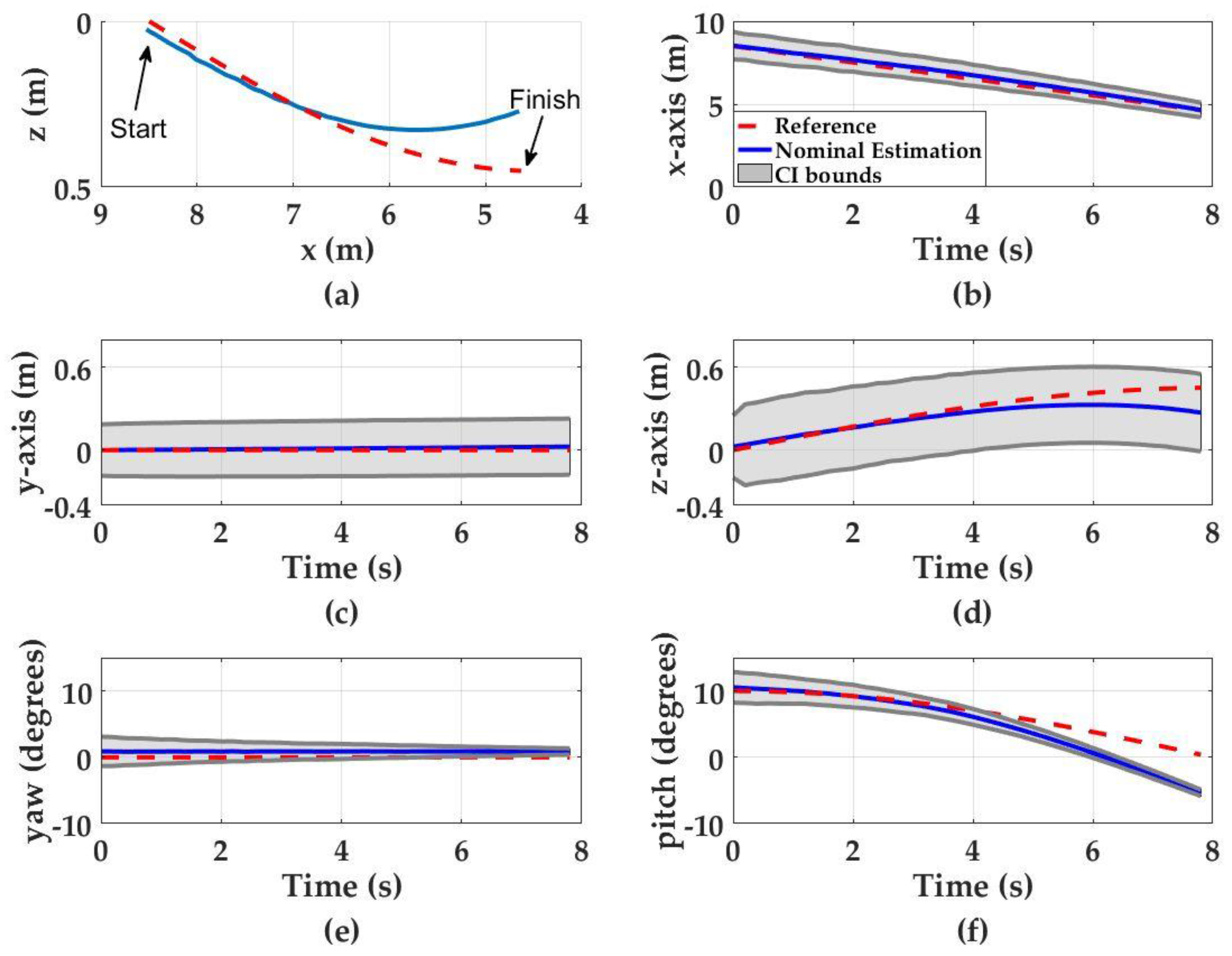
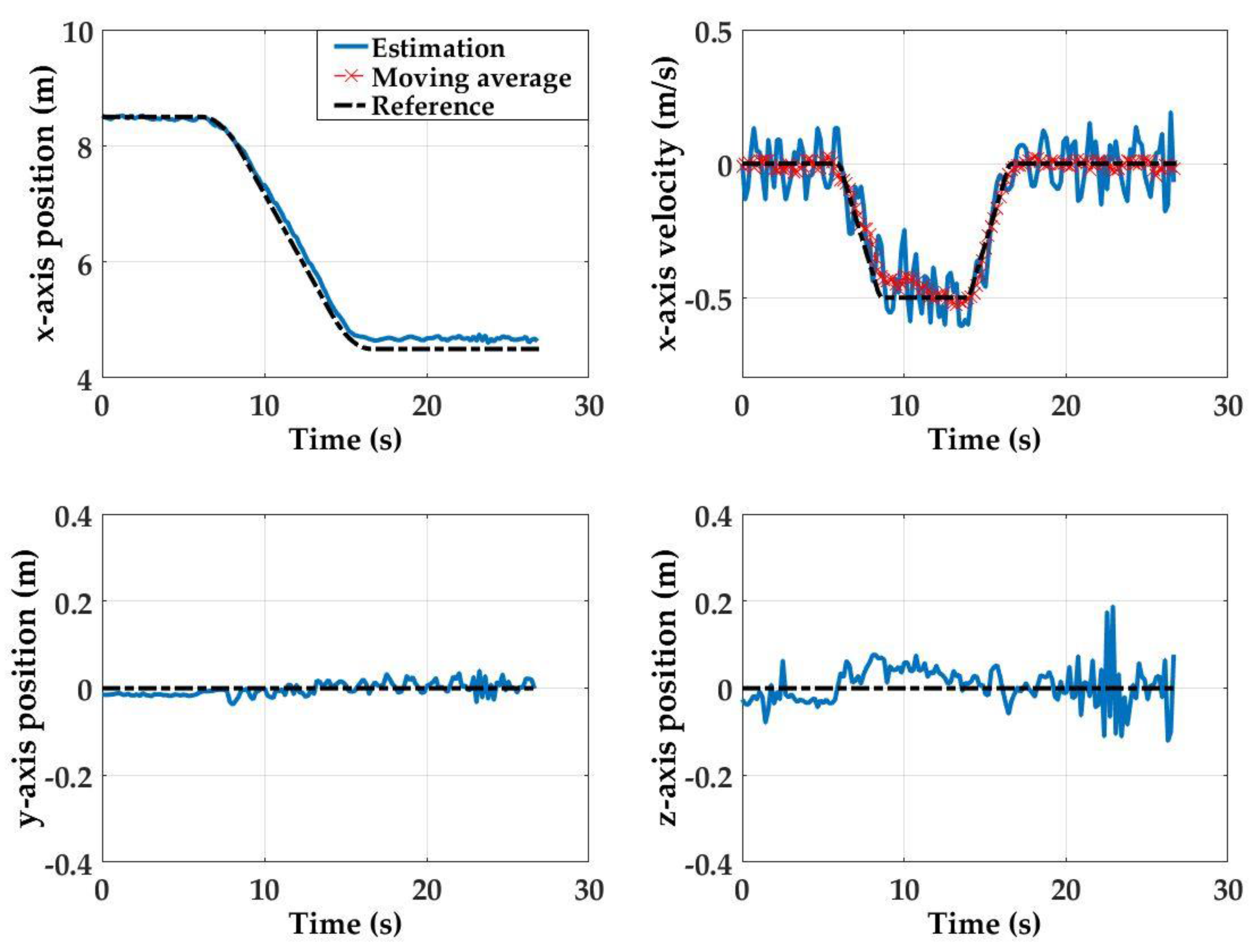
- The UUV undergoing diving motion (i.e., motion restricted to the xz-plane). The initial relative offsets between the light source and the optical detector array are = 8.5 m, = 0 m, = 0 m, = 10°, and = 0°. The diving motion was conducted in clear ( = 0.09 m−1) water conditions.
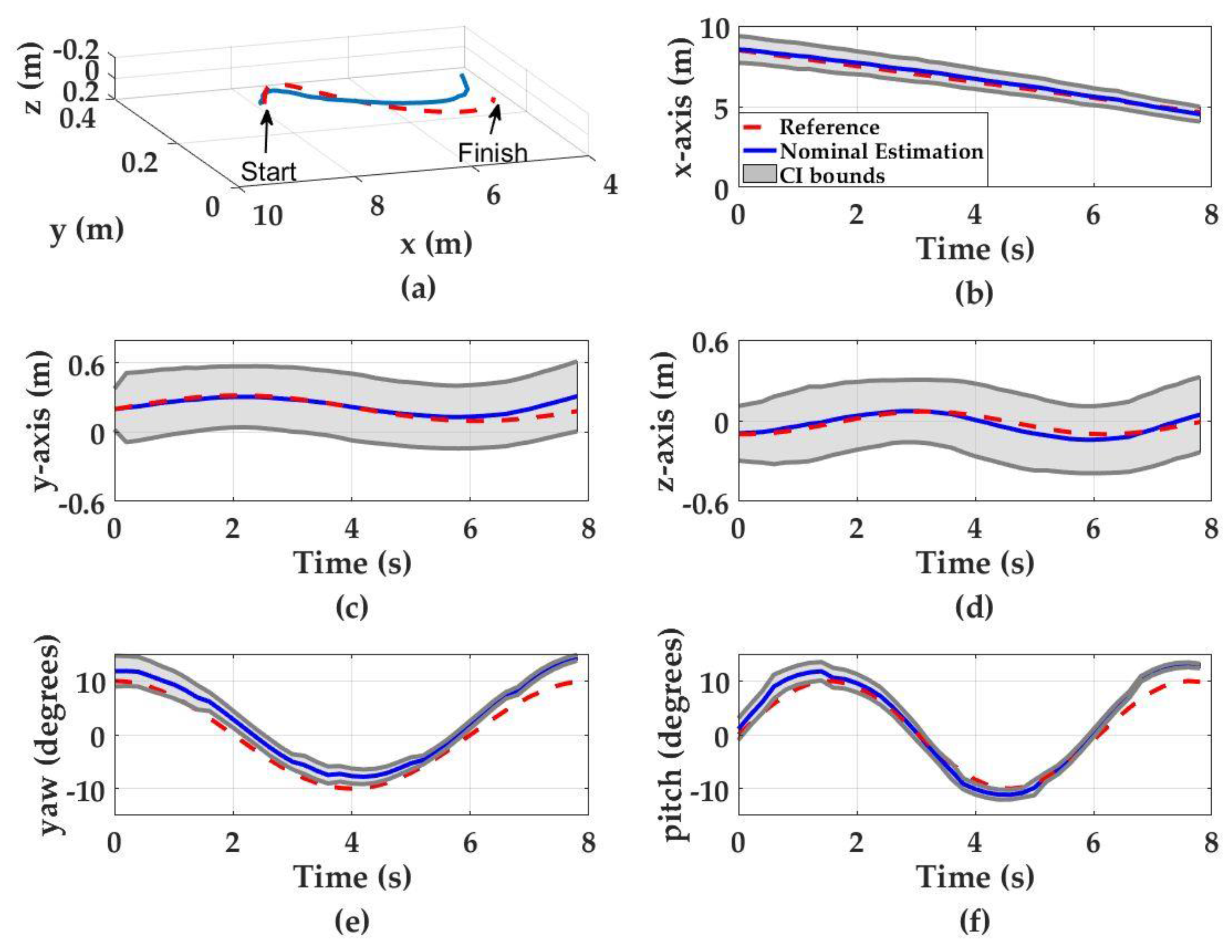
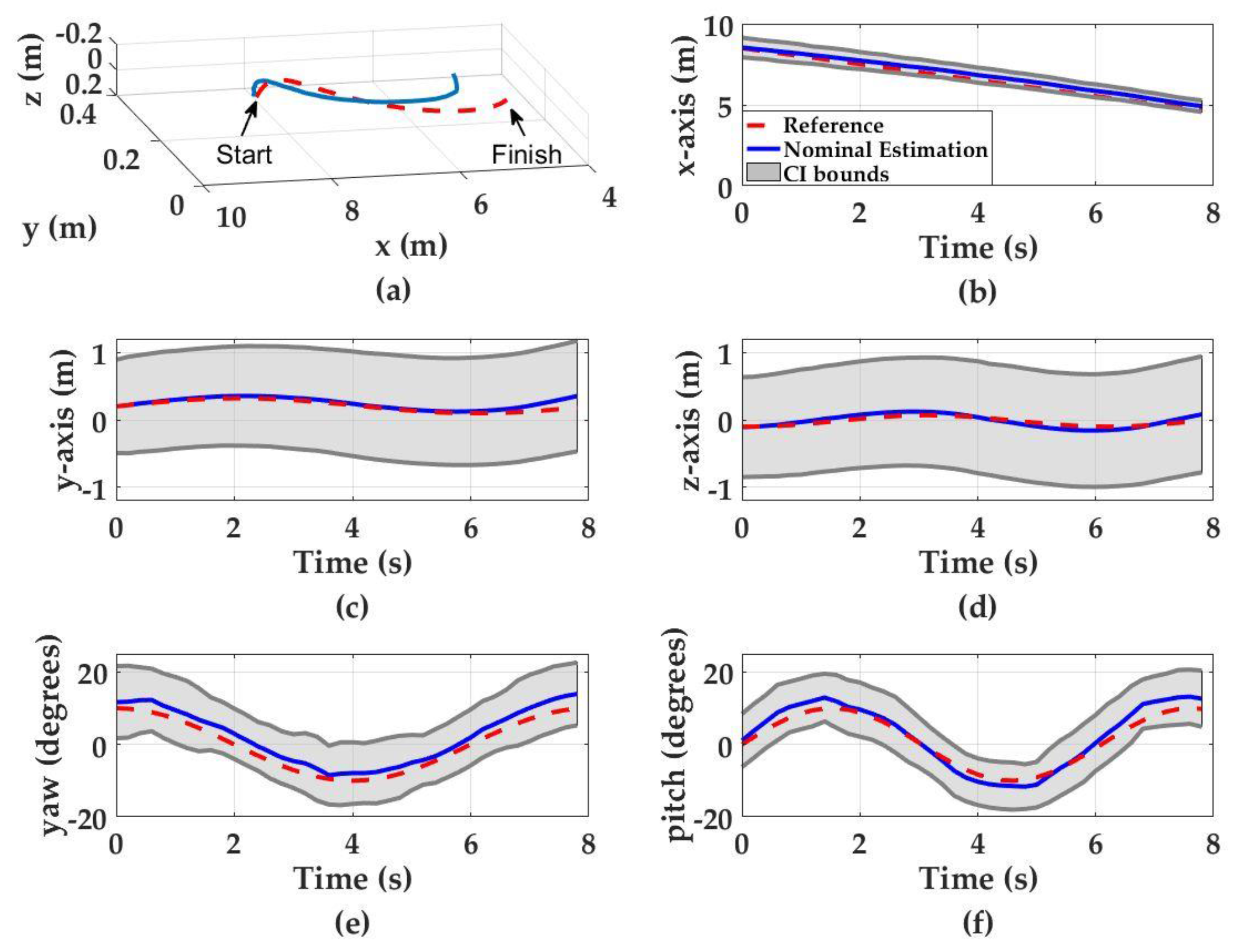
- The UUV undergoing zigzag motion (i.e., diving and heading motion in 3-D space with initial offsets in the y- and z-axis). The initial relative offsets between the light source and the optical detector array are = 8.5 m, = 0.2 m, = −0.1 m, = 0°, and = 10°. The zigzag motion simulation was conducted in clear ( = 0.09 m−1) and turbid ( = 0.2 m−1) water conditions.
3.1.1. Diving Motion
3.1.2. Three-Dimensional Zigzag Motion in Clear Waters ( = 0.09 m−1)
3.1.3. Three-Dimensional Zigzag Motion in Turbid Waters = 0.2 m−1
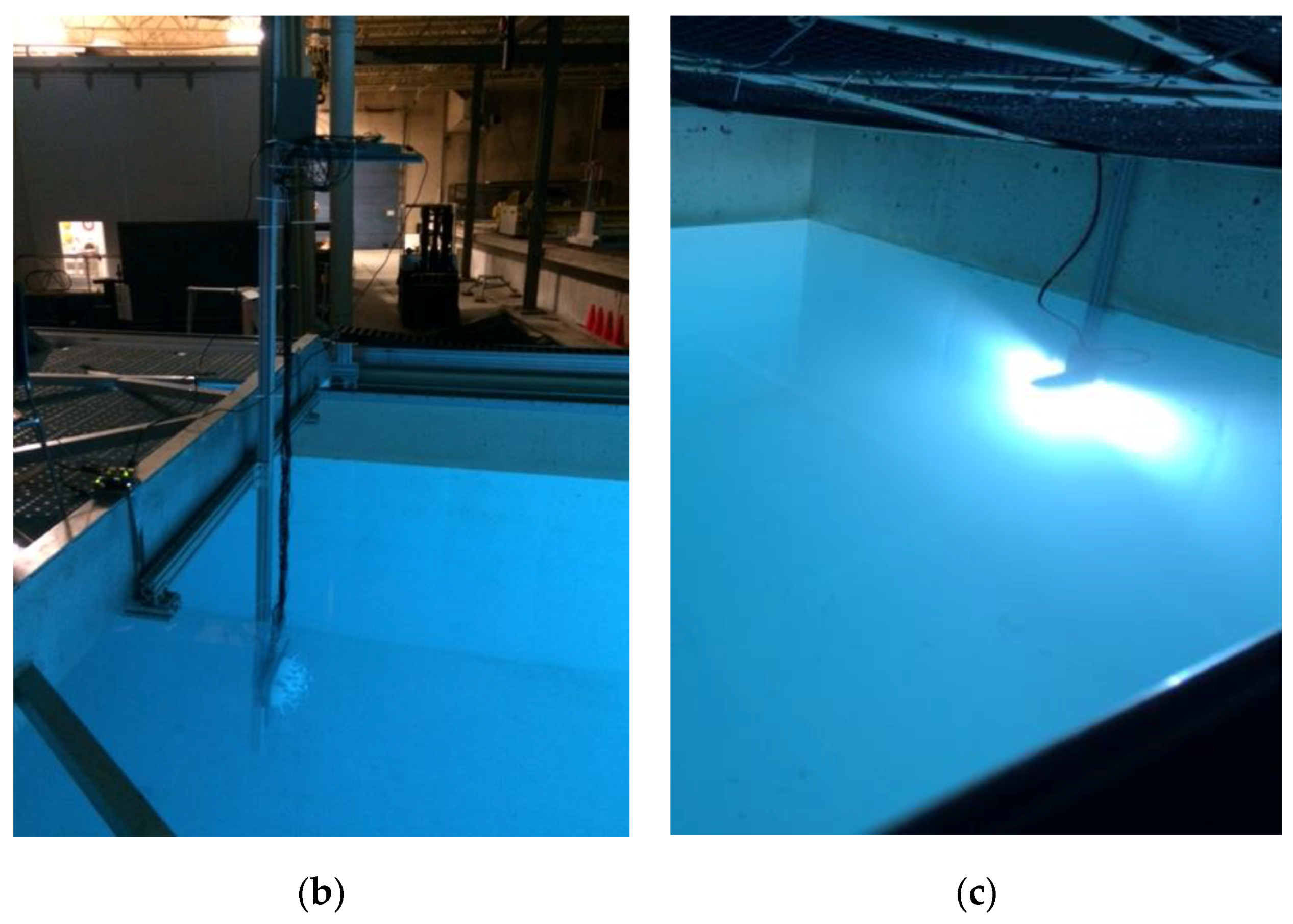
3.2. Empirical Measurements
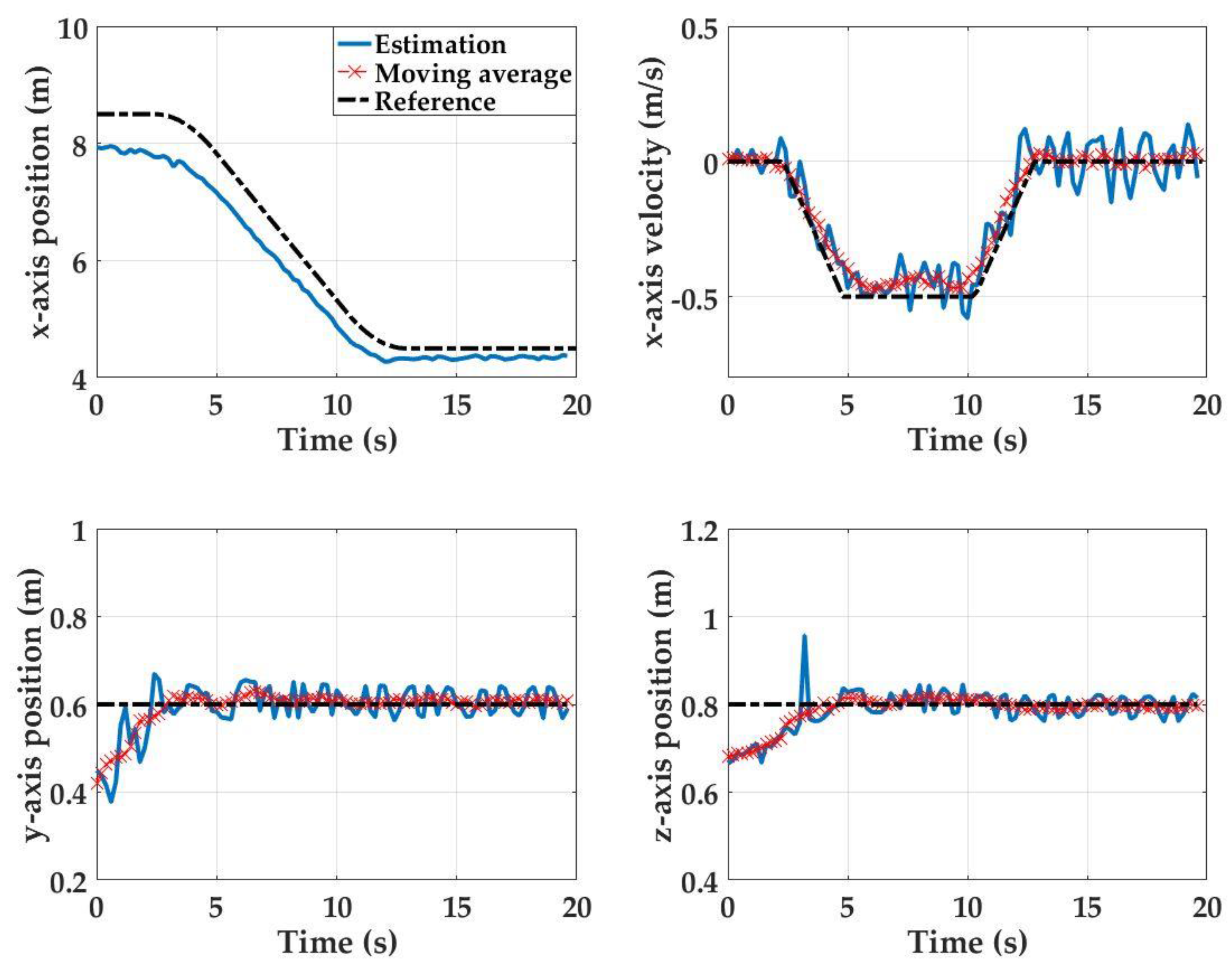
3.2.1. Test 1 Results
3.2.2. Test 2 Results
4. Discussion
5. Conclusions
Acknowledgments
Author Contributions
Conflicts of Interest
References
- Willcox, J.S.; Bellingham, J.G.; Zhang, Y.; Baggeroer, A.B. Performance metrics for oceanographic surveys with autonomous underwater vehicles. IEEE J. Ocean. Eng. 2001, 26, 711–725. [Google Scholar] [CrossRef]
- Eustice, R.; Camilli, R.; Singh, H. Towards Bathymetry-Optimized Doppler Re-Navigation for AUVs. In Proceedings of the Oceans 2005 MTS/IEEE, Washington, DC, USA, 17–23 September 2005; pp. 1–7. [Google Scholar]
- Cruz, N.A.; Matos, A.C. The MARES AUV, A Modular Autonomous Robot for Environment Sampling. In Proceedings of the Oceans 2008, Quebec City, QC, Canada, 15–18 September 2008; pp. 1–6. [Google Scholar] [CrossRef]
- Sakai, H.; Tanaka, T.; Mori, T.; Ohata, S.; Ishii, K.; Ura, T. Underwater Video Mosaicing Using AUV and Its Application to Vehicle Navigation. In Proceedings of the 2004 International Symposium on Underwater Technology, Taipei, Taiwan, 20–23 April 2004; pp. 405–410. [Google Scholar] [CrossRef]
- Kong, J.; Cui, J.H.; Wu, D.; Gerla, M. Building Underwater Ad-Hoc Networks and Sensor Networks for Large Scale Real-Time Aquatic Applications. In Proceedings of the 2005 MILCOM IEEE Military Communications Conference, Atlantic City, NJ, USA, 17–20 October 2005. [Google Scholar] [CrossRef]
- Vasilescu, I.; Detweiler, C.; Doniec, M.; Gurdan, D.; Sosnowski, S.; Stumpf, J.; Rus, D. AMOUR V: A Hovering Energy Efficient Underwater Robot Capable of Dynamic Payloads. Int. J. Robot. Res. 2010, 29, 547–570. [Google Scholar] [CrossRef]
- Dunbabin, M.; Corke, P.; Vasilescu, I.; Rus, D. Data Muling over Underwater Wireless Sensor Networks Using an Autonomous Underwater Vehicle. In Proceedings of the 2006 IEEE International Conference on Robotics and Automation ICRA, Orlando, FL, USA, 15–19 May 2006; pp. 2091–2098. [Google Scholar] [CrossRef]
- Doniec, M.; Topor, I.; Chitre, M.; Rus, D. Autonomous, Localization-Free Underwater Data Muling Using Acoustic and Optical Communication. Exp. Robot. 2013, 88, 841–857. [Google Scholar]
- Teo, K.; An, E.; Beaujean, P.P.J. A robust fuzzy autonomous underwater vehicle (AUV) docking approach for unknown current disturbances. IEEE J. Ocean. Eng. 2012, 37, 143–155. [Google Scholar] [CrossRef]
- Macias, E.; Suarez, A.; Chiti, F.; Sacco, A.; Fantacci, R. A hierarchical communication architecture for oceanic surveillance applications. Sensors 2011, 11, 11343–11356. [Google Scholar] [CrossRef] [PubMed]
- Allen, B.; Austin, T.; Forrester, N.; Goldsborough, R.; Kukulya, A.; Packard, G.; Purcell, M.; Stokey, R. Autonomous Docking Demonstrations with Enhanced REMUS Technology. In Proceedings of the 2016 Oceans MTS/IEEE Conference, Boston, MA, USA, 18–21 September 2006; pp. 1–6. [Google Scholar] [CrossRef]
- Hobson, B.W.; McEwen, R.S.; Erickson, J.; Hoover, T.; McBride, L.; Shane, F.; Bellingham, J.G. The Development and Ocean Testing of an AUV Docking Station for a 21" AUV. In Proceedings of the 2007 Oceans, Vancouver, BC, Canada, 29 September–4 October 2007; Volume 1–5, pp. 1357–1362. [Google Scholar]
- Evans, C.; Keller, M.; Smith, J.S.; Marty, P.; Rigaud, V. Docking Techniques and Evaluation Trials of the SWIMMER AUV: An Autonomous Deployment AUV for Workclass ROVs. In Proceedings of the 2001 MTS/IEEE Conference and Exhibition OCEANS, Honolulu, HI, USA, 5–8 November 2001; pp. 520–528. [Google Scholar] [CrossRef]
- Sendra, S.; Lloret, J.; Jimenez, J.M.; Rodrigues, J.J.P.C. Underwater communications for video surveillance systems at 2.4 GHz. Sensors 2016, 16, 1769. [Google Scholar] [CrossRef] [PubMed]
- Fukasawa, T.; Noguchi, T.; Kawasaki, T.; Baino, M. Marine Bird, a New Experimental AUV with Underwater Docking and Recharging System. In Proceedings of the 2003 Oceans, San Diego, CA, USA, 22–26 September 2003; Volume 4, pp. 2195–2200. [Google Scholar]
- Evans, J.; Redmond, P.; Plakas, C.; Hamilton, K.; Lane, D. Autonomous docking for Intervention-AUVs using sonar and video-based real-time 3D pose estimation. In Proceedings of the 2003 IEEE Oceans, San Diego, CA, USA, 22–26 September 2003; Volume 4, pp. 2201–2210. [Google Scholar] [CrossRef]
- Kondo, H.; Okayama, K.; Choi, J.-K.; Hotta, T.; Kondo, M.; Okazaki, T.; Singh, H.; Chao, Z.; Nitadori, K.; Igarashi, M.; et al. Passive acoustic and optical guidance for underwater vehicles. In Proceedings of the IEEE Oceans 2012—Yeosu, Yeosu, Korea, 21–24 May 2012; pp. 1–6. [Google Scholar] [CrossRef]
- Krupinski, S.; Maurelli, F.; Grenon, G.; Petillot, Y. Investigation of autonomous docking strategies for robotic operation on intervention panels. In Proceedings of the IEEE Oceans 2008, Quebec City, QC, Canada, 15–18 September 2008; Volume 1–4, pp. 1301–1310. [Google Scholar] [CrossRef]
- Li, D.; Chen, Y.; Shi, J.; Yang, C. Autonomous underwater vehicle docking system for cabled ocean observatory network. Ocean Eng. 2015, 109, 127–134. [Google Scholar] [CrossRef]
- Bonin-Font, F.; Oliver, G.; Wirth, S.; Massot, M.; Lluis Negre, P.; Beltran, J.-P. Visual sensing for autonomous underwater exploration and intervention tasks. Ocean Eng. 2015, 93, 25–44. [Google Scholar] [CrossRef]
- Park, J.-Y.; Jun, B.; Lee, P.; Oh, J. Experiments on vision guided docking of an autonomous underwater vehicle using one camera. Ocean Eng. 2009, 36, 48–61. [Google Scholar] [CrossRef]
- Lee, D.; Kim, G.; Kim, D.; Myung, H.; Choi, H.-T. Vision-based object detection and tracking for autonomous navigation of underwater robots. Ocean Eng. 2012, 48, 59–68. [Google Scholar] [CrossRef]
- Simpson, J.A.; Hughes, B.L.; Muth, J.F. Smart Transmitters and Receivers for Underwater Free-Space Optical Communication. IEEE J. Sel. Areas Commun. 2012, 30, 964–974. [Google Scholar] [CrossRef]
- Celikkol, B.; Eren, F.; Pe’eri, S.; Rzhanov, Y.; Swift, M.R.; Thein, M.W. Optical Based Pose Detection for Multiple Unmanned Underwater Vehicles. U.S. Patent 14/680,447, 4 July 2015. [Google Scholar]
- Teo, K.; Goh, B.; Chai, O.K. Fuzzy Docking Guidance Using Augmented Navigation System on an AUV. IEEE J. Ocean. Eng. 2015, 40, 349–361. [Google Scholar] [CrossRef]
- Conrado de Souza, E.; Maruyama, N. Intelligent UUVs: Some issues on ROV dynamic positioning. IEEE Trans. Aerosp. Electron. Syst. 2007, 43, 214–226. [Google Scholar] [CrossRef]
- Eren, F.; Pe’eri, S.; Thein, M.-W. Characterization of optical communication in a leader-follower unmanned underwater vehicle formation. In Proceedings of the SPIE Defense, Security, and Sensing, Baltimore, MD, USA, 29 April–3 May 2013; p. 872406. [Google Scholar] [CrossRef]
- Eren, F.; Pe, S.; Rzhanov, Y.; Thein, M.; Celikkol, B. Optical detector array design for navigational feedback between unmanned underwater vehicles (UUVs). IEEE J. Ocean. Eng. 2016, 41, 18–26. [Google Scholar] [CrossRef]
- Eren, F.; Thein, M.; Pe, S.; Rzhanov, Y.; Celikkol, B.; Swift, R. Pose detection and control of multiple unmanned underwater vehicles (UUVs) using optical Feedback. In Proceedings of the OCEANS 2014—TAIPEI, Taipei, Taiwan, 7–10 April 2014; pp. 1–6. [Google Scholar] [CrossRef]
- Birkebak, M. Airborne Lidar Bathymetry Beam Diagnostics Using an Underwater Optical Detector Array. Master’s Thesis, University of New Hampshire, Durham, NH, USA, May 2017. [Google Scholar]
- Gonzalez, R.; Woods, R. Digital Image Processing; Prentice Hall: Upper Saddle River, NJ, USA, 2002; Volume 190. [Google Scholar]
- Rzhanov, Y.; Eren, F.; Thein, M.-W.; Pe’eri, S. An image processing approach for determining the relative pose of unmanned underwater vehicles. In Proceedings of the OCEANS 2014—TAIPEI, Taipei, Taiwan, 7–10 April 2014; pp. 1–4. [Google Scholar] [CrossRef]
- Pe’eri, S.; Parrish, C.; Azuike, C.; Alexander, L.; Armstrong, A. Satellite Remote Sensing as a Reconnaissance Tool for Assessing Nautical Chart Adequacy and Completeness. Mar. Geod. 2014, 37, 293–314. [Google Scholar] [CrossRef]
- NOAA Office of Coastal Survey. Portsmouth Harbor 1983. Available online: http://www.charts.noaa.gov/PDFs/13283.pdf (accessed on 2 December 2015).
- Singh, H.; Bellingham, J.G.; Hover, F.; Lerner, S.; Moran, B.A.; Von der Heydt, K.; Yoerger, D. Docking for an autonomous ocean sampling network. IEEE J. Ocean. Eng. 2001, 26, 498–514. [Google Scholar] [CrossRef]
- Pe’eri, S.; Shwaery, G. Light field and water clarity simulation of natural environments in laboratory conditions. In Proceedings of the SPIE Defense, Security, and Sensing, Baltimore, MD, USA, 23–27 April 2012; p. 83721A. [Google Scholar] [CrossRef]
- Cox, W.; Muth, J.F. Simulating channel losses in an underwater optical communication system. J. Opt. Soc. Am. 2014, 31, 920–934. [Google Scholar] [CrossRef] [PubMed]














{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Parameter | Standard Deviation |
|---|---|
| Water column temperature variation | 3 °C |
| Net electronic noise (max) | 50 mV |
| 0.015 |
| Case I UUV Diving Motion | Case II UUV Zigzag Motion | |||||||
|---|---|---|---|---|---|---|---|---|
| Time (s) | t = 0 | t = 2.6 | t = 5.2 | t = 8 | t = 0 | t = 2.6 | t = 5.2 | t = 8 |
| x (m) | 8.5 | 7.22 | 5.93 | 4.53 | 8.5 | 7.22 | 5.94 | 4.56 |
| y (m) | 0 | 0 | 0 | 0 | 0.2 | 0.31 | 0.12 | 0.2 |
| z (m) | 0 | 0.22 | 0.38 | 0.45 | −0.1 | 0.06 | −0.06 | 0 |
| pitch (˚) | 10 | 8.7 | 5.2 | 0 | 0 | 4.5 | −8 | 9.2 |
| yaw (˚) | 0 | 0 | 0 | 0 | 10 | −4.5 | −5.9 | 10 |
| (m/s) | 0.5 | 0.5 | 0.5 | 0.5 | 0.5 | 0.5 | 0.5 | 0.5 |
© 2017 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Eren, F.; Pe’eri, S.; Thein, M.-W.; Rzhanov, Y.; Celikkol, B.; Swift, M.R. Position, Orientation and Velocity Detection of Unmanned Underwater Vehicles (UUVs) Using an Optical Detector Array. Sensors 2017, 17, 1741. https://doi.org/10.3390/s17081741
Eren F, Pe’eri S, Thein M-W, Rzhanov Y, Celikkol B, Swift MR. Position, Orientation and Velocity Detection of Unmanned Underwater Vehicles (UUVs) Using an Optical Detector Array. Sensors. 2017; 17(8):1741. https://doi.org/10.3390/s17081741
Chicago/Turabian StyleEren, Firat, Shachak Pe’eri, May-Win Thein, Yuri Rzhanov, Barbaros Celikkol, and M. Robinson Swift. 2017. "Position, Orientation and Velocity Detection of Unmanned Underwater Vehicles (UUVs) Using an Optical Detector Array" Sensors 17, no. 8: 1741. https://doi.org/10.3390/s17081741
APA StyleEren, F., Pe’eri, S., Thein, M.-W., Rzhanov, Y., Celikkol, B., & Swift, M. R. (2017). Position, Orientation and Velocity Detection of Unmanned Underwater Vehicles (UUVs) Using an Optical Detector Array. Sensors, 17(8), 1741. https://doi.org/10.3390/s17081741