1. Introduction
Barrier coverage of wireless sensor networks is a fundamental issue where the objective is to construct a long narrow barrier belt area of sensors to detect intruders that attempt to cross the deployed region. Barrier coverage serves a variety of applications such as national border control, critical resource protection, security surveillance, and intruder detection [
1]. Due to its unique requirements, the barrier coverage of a wireless sensor networks exhibits different characteristics and calls for different design considerations as compared to other coverage measures such as area coverage [
2,
3] and target coverage [
4,
5,
6]. The issues of barrier coverage have been discussed in traditional scalar sensor networks [
7,
8] and camera sensor networks [
9,
10], respectively.
Previous studies on barrier coverage mainly focused on traditional scalar sensor networks, in which the sensing range of a sensor is often modeled as a disk and an object is said to be covered or detected by a sensor if it is within the sensing range of the sensor [
11,
12]. Compared with traditional scalar sensors, camera sensors can provide much richer information about the environment in the forms of images or videos and hence have huge potential in applications.
For barrier coverage, how to use sensor nodes to meet the mission requirements for monitoring tasks is still an open issue. However, the barrier coverage of camera sensors is more complicated than traditional barrier coverage. In fact, one fundamental difference between camera sensors and traditional scalar sensors in coverage is that camera sensors may generate different views of the same object if they are from different viewpoints [
1]. The content of barrier coverage in camera sensor networks focuses on the moving targets (e.g., persons and vehicles) through the barrier area. However, in most of the previous models, targets were simply considered as points. The disadvantage of these models is that some physical features (e.g., size, shape and color) of targets are neglected.
In recent years, more and more concepts of barrier coverage have been developed to meet the demands of the moving target. A target is said to be full-view covered if there is always a camera sensor to cover it no matter which direction it faces and if the camera sensor’s viewing direction is sufficiently close to the target’s facing direction [
13]. In [
14], the authors proposed local face-view barrier coverage, a novel concept that achieves statistical barrier coverage in camera sensor networks leveraging intruders’ trajectory lengths along the barrier and head rotation angles. The above two concepts take into account the effective angle of the camera sensor’s viewing direction and the intruder’s facing direction. However, both full-view barrier coverage and local face-view barrier coverage only consider the sector sensing model, which is a two-dimensional (2D) model. Not only should the effective angle in the horizontal direction be utilized, but also the effective angle in the vertical direction should be taken into account in the real application. For example, the reason for full-view barrier coverage is that the facing direction of an intruder and the viewing direction of a camera sensor may result in a certain angle in the horizontal direction when the intruder is crossing the sensing area of the camera sensor. Similarly, the reason for local face-view barrier coverage is that the intruder’s head may rotate either to the left or to the right within a certain angle. However, for most real-world applications, camera sensors are deployed within a certain height from the ground, which can result in an angle in the vertical direction between the intruder’s facing direction and the viewing direction of one camera sensor. Besides, the intruder’s head can also rotate up and down. Then, we should consider the three-dimensional (3D) sensing model of camera sensors to construct real barrier coverage.
Camera sensors can capture a rectangular image of the intruder in camera sensor networks. In the image, what we are concerned with is the region of interest (ROI), which depends on the kind of monitoring task. For example, when a camera sensor captures a person, the ROI is usually the person’s face, rather than the person’s back. On the road crossing or the parking entrances, the ROI is usually the license plate number of the car instead of the brand.
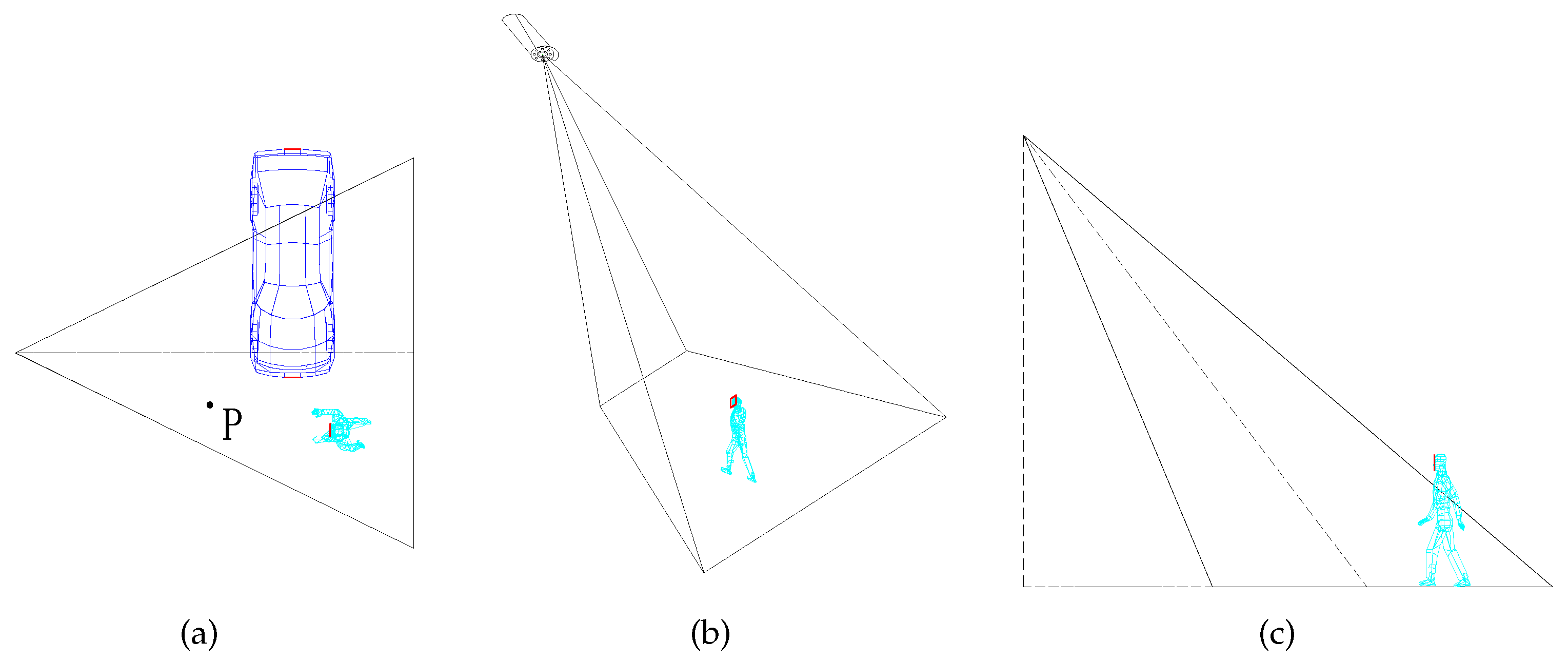
Figure 1a shows an example of different types of targets (a point P, a car and a person) in the sensing area of the camera sensor. As we can see from the figure, the point P can be effectively detected by the camera sensor. However, the realistic targets may not be accomplished with desirable performance. Only a portion of the car can be captured by the camera sensor because the other portion is not in the sensing range of the camera sensor. Since the angle between the car’s facing direction and the camera sensor’s viewing direction is too large, the camera sensor cannot read the license plate number of the car. As depicted in
Figure 1a,b, the person is seemingly captured by the camera sensor when he is walking in the sensing area of the camera sensor. However, as illustrated in
Figure 1c, the camera sensor cannot recognize the walking person because the person’s face is not in the sensing area of the camera sensor. Obviously, it is not appropriate to use points to express different types of targets when we consider the ROI (e.g., the license plate number of the car and the person’s face). Therefore, to maintain high-level surveillance quality, the types of targets should be taken into account in to how to achieve the barrier coverage.
Furthermore, for the task with high resolution, even though the ROI of a target is located in the sensing area of the camera sensor, the target cannot be effectively captured when the target is detected with low resolution by the camera sensor. As shown in
Figure 1c, the person’s face will be detected by the camera sensor when the person is walking straight into the sensing area of the camera sensor. However, this does not mean that the image of the person’s face is with high resolution. All factors, including the resolution of camera sensor, the size of the ROI, the angle and the distance between the camera sensor’s viewing direction and the person’s facing direction can influence the resolution of the ROI. In addition, the desired resolution corresponds to the monitoring task. For example, in the application of face recognition, the required resolution for the identifying gender is quite different from that identifying who it is. Only with the desired resolution of the ROI can the target be effectively detected and captured by the camera sensors.
Hence, with these observations, we study the barrier coverage problem with a 3D sensing model of camera sensors. Furthermore, we propose a new resolution criterion based on 3D sensing model of camera sensors for capturing intruder’s face (or the ROI). Our contributions in this paper are summarized as follows:
We propose a new resolution criterion for capturing the ROI of target. Instead of considering the target as a point, the ROI of target should be considered as a rectangular area. Given the requirements of task, the effective resolution sensing model is related to and . and are the effective horizontal angle and the effective vertical angle between the camera sensor’s viewing direction and the target’s facing direction, respectively.
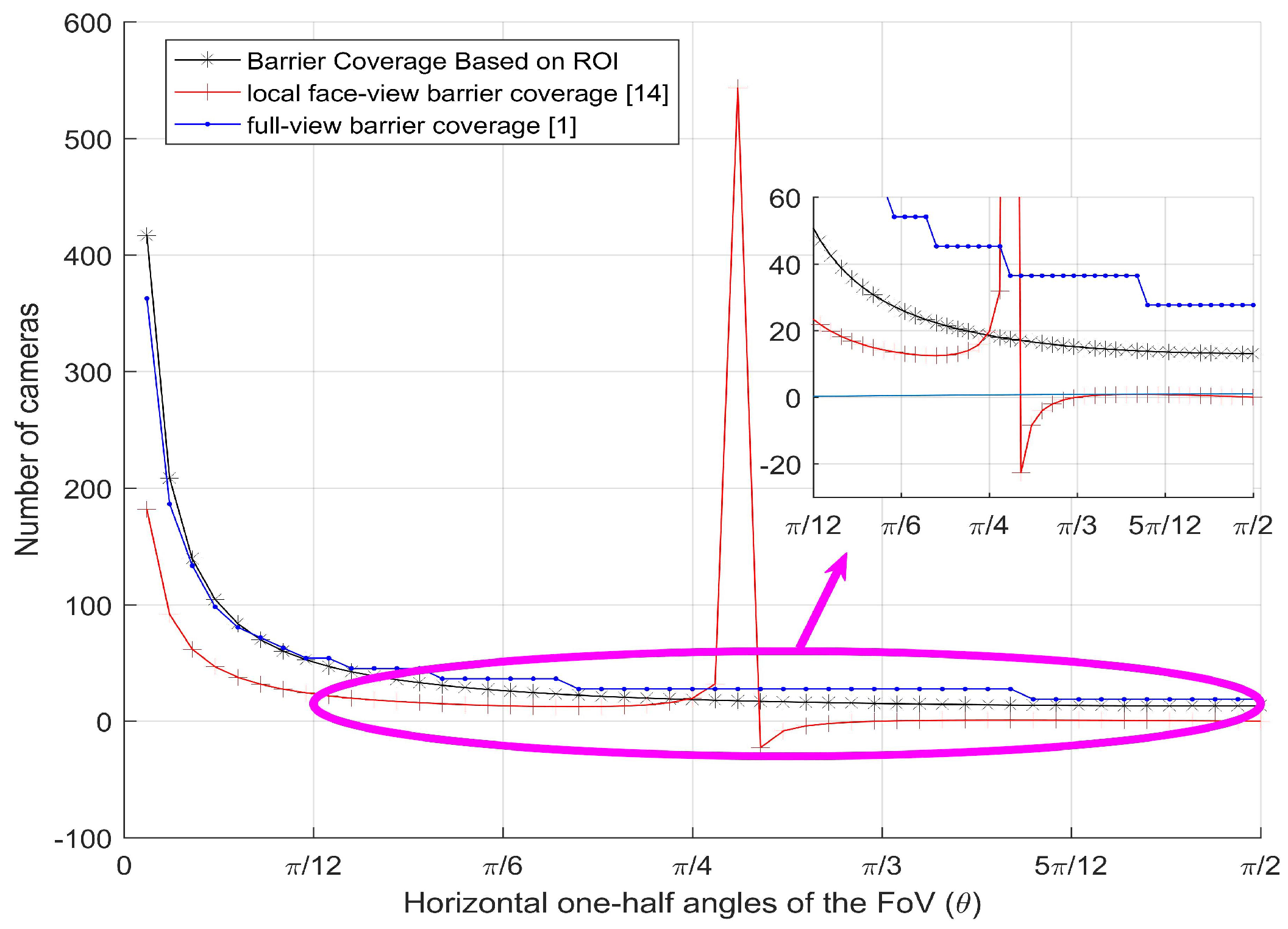
We study the barrier coverage according to the tasks’ requirements with our resolution criterion in camera sensor networks. First, we analyse the width of barrier area, the distance between the camera sensors, and the coverage probability of barrier coverage. Second, through the extensive evaluation, the results illustrate that our proposed concept was correct. Compared with full-view barrier coverage and local face-view barrier coverage, the required number of camera sensors in the barrier coverage using 3D sensing model was more reasonable.
The rest of this paper is organized as follows.
Section 2 highlights the related work.
Section 3 formulates 3D sensing model based on ROI.
Section 4 studies barrier coverage based on the 3D sensing model.
Section 5 evaluations of our theoretical results.
Section 6 discusses of the robustness and fault tolerance of our barrier coverage. The paper concludes with
Section 7.
2. Related Work
Sensor coverage, one of the fundamental problems of sensor networks, tries to answer the questions about the quality of sensing (surveillance) that a particular sensor networks provides [
15]. Depending on the type of application, coverage problems can be divided into point coverage [
5], area coverage [
16], and barrier coverage [
17]. A major goal is to detect intruders as they cross a border or as they penetrate a protected area. This type of coverage is referred to as barrier coverage, where the sensors form a barrier for the intruder, and sensor nodes deployed in a region is said to provide barrier coverage if and only if the intruder’s crossing path intersects the detection range of at least one sensor [
7,
18]. According to various criteria, barrier coverage can be divided into strong and weak barrier coverage, single and K-barrier coverage, respectively. Liu et al. [
19] introduced strong and weak barrier coverage problems of wireless sensor networks using scalar nodes. Weak barrier coverage only guarantees detection of intruders moving along congruent paths. In contrast, strong barrier coverage guarantees detection of intruders no matter what crossing paths they take. Besides, the K-barrier coverage problem, whether all the intruder’s crossing paths through the barrier coverage area are K-covered and that a crossing path is said to be K-covered if it can be covered by at least K distinct sensors was discussed in [
20].
Coverage problems with uncertain properties, including probabilistic and directional sensing models, should be considered in practical applications [
21]. In the traditional sensor networks [
15,
22], the authors justified a target is effective for sensing by a sensor node when the target is in the sensing area of the sensor, which is referred to as an omin-directional deterministic sensing model. Ahmed et al. [
23] investigated the coverage issues in wireless sensor networks based on probabilistic coverage and proposed a distributed probabilistic coverage algorithm. Probabilistic sensing is valid for certain kinds of sensors (e.g., temperature sensors, acoustic sensors and seismic sensors), where the signal strength decays with the distance from the source [
24]. In order to detect an intruder, Onur et al. proposed a probabilistic detection model with false alarm rate in [
25].
Compared with traditional scalar sensors, camera sensors provide much richer information of the environment in the forms of images or videos and hence promise huge potential in applications [
26]. Furthermore, most previous studies in camera sensor networks mainly took into account the deterministic sensing models of camera sensors, such as sector [
27] and trapezoid sensing models [
28]. Based on the directional sensing model, Zhang et al. [
29] studied the weak and strong barrier coverage problems of directional sensor nodes, and they presented three methods to solve the maximum directional sensor barrier problem (MDSBP). Wang et al. discussed the K-barrier coverage problem with minimum number of mobile sensors required and the maximum number of barriers that can be formed given the stationary and mobile sensors in [
30]. Furthermore, in [
31], they studied the barrier problem with directional and omni-directional sensing models, respectively.
Furthermore, since camera sensors can achieve more spatial information than traditional scalar sensors, scholars began to study a 3D sensing model for camera sensors.
Ma et al. [
32] proposed more realistic 3D sensing model of the camera sensor to achieve area coverage. Munishwar et al. [
33] defined a new problem of deriving the optimal set of field-of-view (FoV) to be considered by PTZ camera sensors. The performance of PTZ coverage algorithms can be substantially increased by reducing the number of candidate FoVs for each camera sensor. Rather than focusing on camera sensor parameters, they focused on the group of targets covered. Barr et al. [
34] proved that there is no strong barrier coverage in a large 3D underwater scalar sensor networks. However, to the best of our knowledge, there is no existing work to study barrier coverage with 3D sensing model of camera sensors.
For better consideration of the intrinsic property of camera sensors, Wang et al. [
13] first proposed the full-view coverage, which addresses the issues of viewing direction with the sector sensing model of camera sensor. In a full-view coverage model, a point is full-view-covered if there is always a camera sensor to cover it no matter which direction it faces and the camera sensor’s viewing direction is sufficiently close to the target’s facing direction. Wang et al. further studied the full-view coverage in [
14,
35,
36]. Combining the directional characteristic with high energy consumption of the camera sensor, the authors of [
37,
38] have been using mobile camera nodes to complete the full-view barrier coverage. Based on the full-view coverage, Ma et al. [
39] focused on the minimum camera barrier coverage problem (MCBCP) in wireless camera sensor networks. However, the camera sensor only offered a 2D sensing model in the above works.
Studies on basic barrier coverage types and sensing models are discussed. Most existing works focused on considering target as a point, ignoring extraction the real ROI. Besides, for more precise monitoring tasks, there is resolution requirement to recognize a real object in camera sensor networks. Based on a convex optimization approach, a method of multi-camera deployment for visual coverage of a 3D object surface was proposed in [
40]. The authors proposed a new resolution criterion, which simultaneously considered both the distance and the view angle. However, it still processed each point of the module surface iteratively in their works. Hence, in this paper, we propose an effective resolution criterion based on a 3D sensing model of the camera sensor.
To the best our knowledge, the works of Wang et al. [
1] and Yu et al. [
14] are the most related to our study. Based on the full-view coverage, a camera barrier is constructed by a deterministic deployment strategy along the barrier line in [
1]. Furthermore, Yu et al. [
14] proposed local face-view barrier coverage, a novel concept that achieves statistical barrier coverage in camera sensor networks leveraging intruders’ trajectory lengths along the barrier and head rotation angles, and also employed the deterministic deployment strategy along the barrier line. Our work is motivated from [
1,
14], but with two distinct differences. First, the above two concepts take into account the effective angle of the camera sensor’s viewing direction and the intruder’s facing direction. However, both full-view barrier coverage and local face-view barrier coverage only consider the sector sensing model, which is a 2D model. In contrast, we study the 3D sensing model of the camera sensor, which is closer to practical applications. In addition, not only should the effective angle in the horizontal direction be utilized, but also the effective angle in the vertical direction should be taken into account for the real application. For most real-world applications, camera sensors are deployed within a certain height from the ground, which can result in an angle in the vertical direction between the intruder’s facing direction and the viewing direction of one camera sensor. Besides, the intruder’s head can also rotate up and down. Then, we should consider the 3D sensing model of camera sensors for the real barrier coverage.
3. 3D Sensing Model Based on ROI
In this section, we first describe preliminaries, and then discuss the 3D sensing model and the realistic resolution criterion of camera sensors.
3.1. Preliminaries
Definition 1 (Region of interest, ROI).
What we are concerned with in the image, or a portion of the target area.
The ROI is significantly different for different monitoring tasks. For example, the color and the license plate number of the car are our concern when we track a car. Similarly, the face is our concern when we monitor a person [
41]. Since the ROI in the image usually manifests to rectangular ROI, we will state rectangular ROI in this paper. Besides, the intruder’s face is used as an example to illustrate the ROI.
Definition 2 (Effective resolution).
The real number of pixels of the ROI in the image plane when the camera sensor captures the ROI.
There are obviously different resolution requirements for different monitoring tasks. A high resolution image is required to identify the details of the ROI. In contrast, the number of pixels if only to identify the target contour will be greatly reduced. For example, when tracking a moving person, the desired resolution is completely different for identifying the color of clothing and the facial expression.
Definition 3 (Effective width).
The width of the ROI captured by the camera sensor, denoted by .
Definition 4 (Effective length).
The length of the ROI captured by the camera sensor, denoted by .
Definition 5 (Effective horizontalangle).
The angle between the target’s facing direction and the camera sensor’s viewing direction in the horizontal plane, denoted by α, .
It must be noted that the effective horizontal angle is part of the reason for full-view [
1,
13] and face-view [
14], respectively.
Definition 6 (Effective vertical angle).
The angle between the target’s facing direction and the camera sensor’s viewing direction in the vertical plane, denoted by β, .
3.2. 3D Sensing Model
Combined with the 3D sensing model [
32], we proposed a 3D sensing model based on ROI.
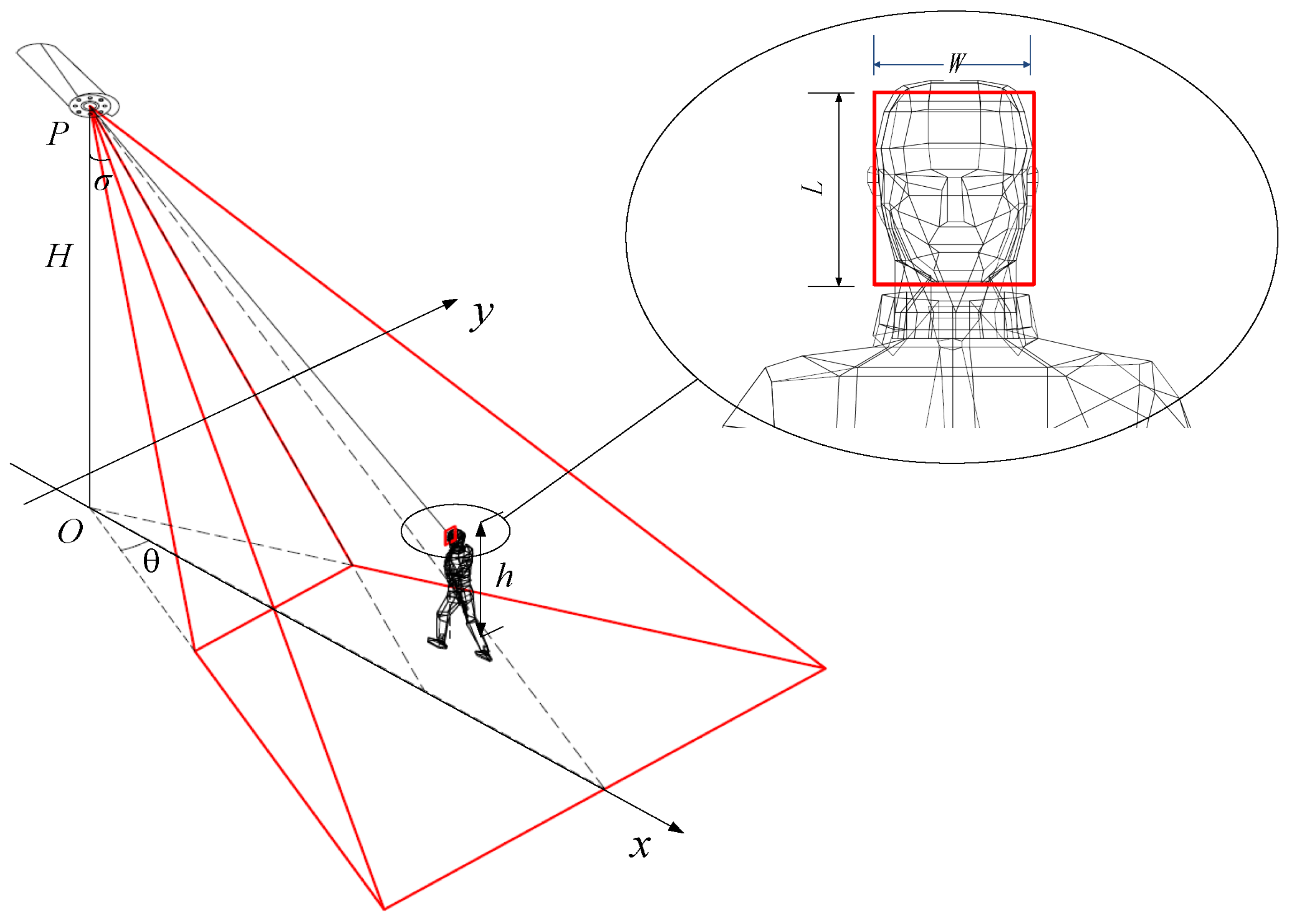
Figure 2 illustrates the 3D sensing model and the ROI.
The 3D sensing model is denoted by 5-tuple , where is the location of a camera sensor in 3D space. is the location of the camera sensor in the ground, and H is the height of the camera sensor from the ground. is the sensing orientation of the camera sensor. Unless otherwise specified, and are the components along negative direction of z-axis and positive direction of x-axis, respectively. is the minimal value of , and and are the horizontal and vertical one-half angles of the FoV around , respectively.
The imaging results of the ROI are completely different using different properties of camera sensors. In this paper, the focal length of camera sensor is denoted by f. and are the number of pixels along the horizontal and vertical directions per unit length in the image plane. In other words, the image size of the ROI on the image plane is . L and W denote the length and width of the ROI, respectively. D is the distance between the center of ROI and the camera sensor, and h is the height distance between the center of ROI and the ground.
3.3. New Resolution Criterion
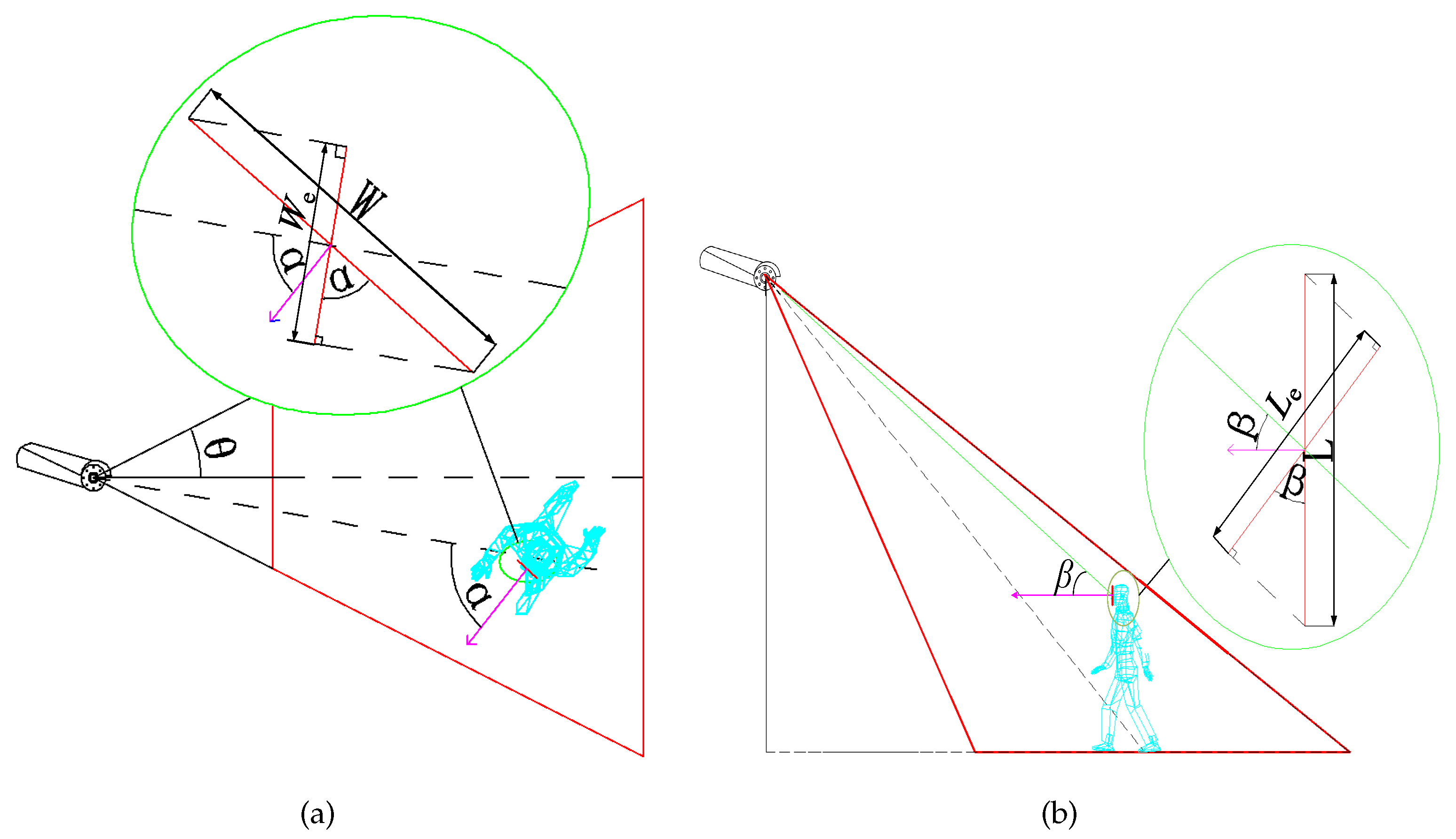
Theorem 1. The effective resolution of the ROI captured by the camera sensor is, Proof of Theorem 1. Figure 3 illustrates the ROI in the horizontal and vertical projections. When the target is moving in the FoV of the camera sensor, effective horizontal angle
and effective vertical angle
are formed between the target and the camera sensor. ☐
As we know, the optical imaging principle is,
From Equations (
3) and (
4), we can get the size of ROI on the image plane, which is,
According to Equations (
1) and (
2), the size of ROI on the image plane is,
The effective resolution of the ROI is,
H is the height of the camera sensor from the ground and h is the height distance between the center of ROI and the ground. The length of the ROI is L.
According to Equations (
7) and (
8), we can get the effective resolution of the ROI, which is,
With this new resolution criterion, we can state one visual coverage constraint using a prescribed threshold
as the task parameter,
4. Barrier Coverage
In this section, we first present the barrier coverage using the 3D sensing model based on ROI. Next we describe the width of barrier coverage and the distance between two adjacent camera sensors. Finally, we introduce the coverage probability of barrier coverage with respect to different tasks.
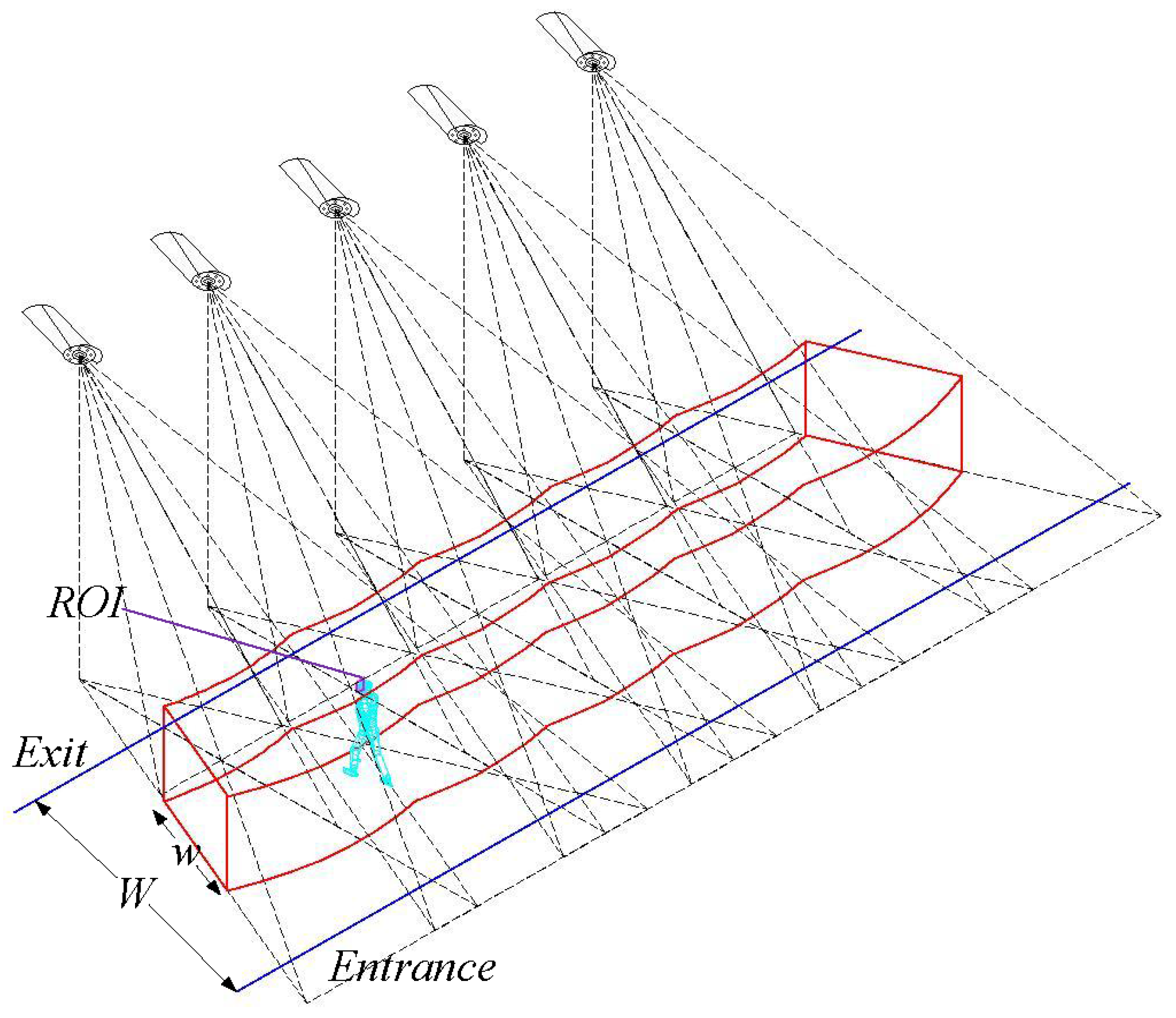
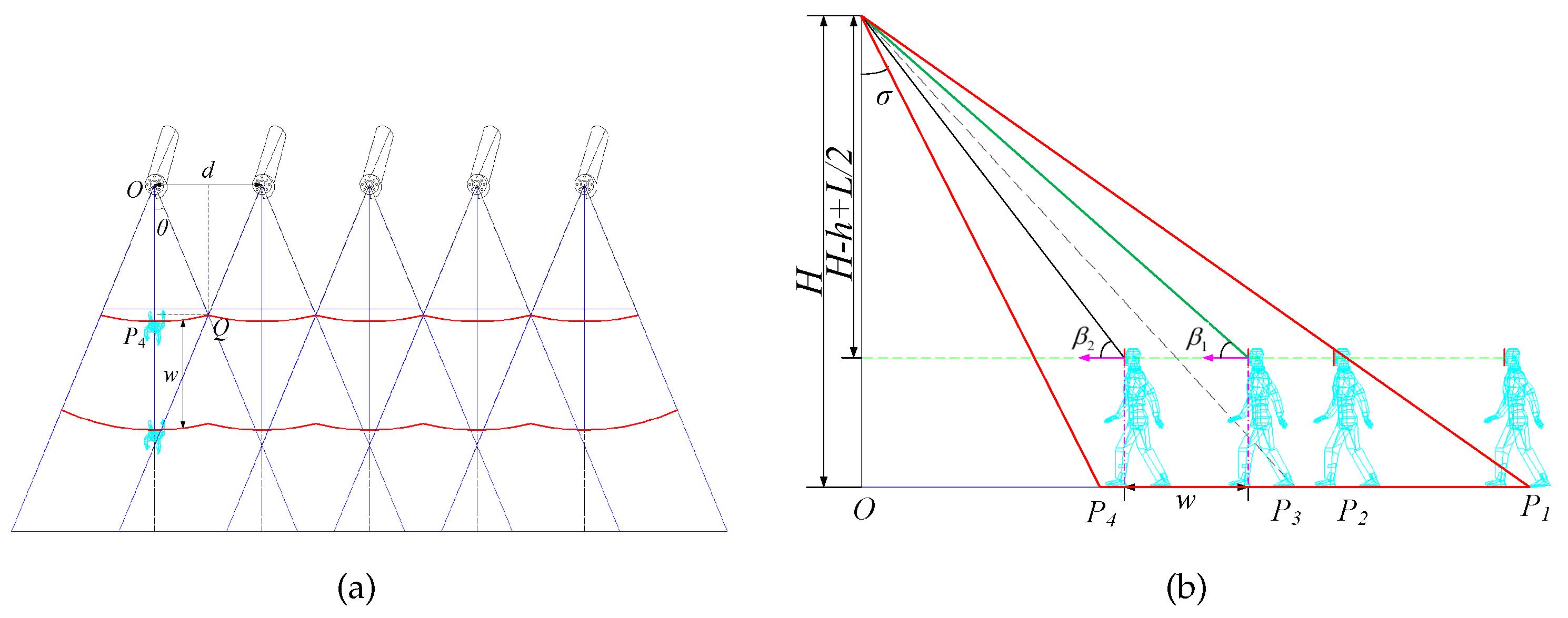
4.1. Deployment Pattern
We consider a regular pattern [
14] in which all camera sensors are deployed on a line along the exit and all camera sensors face toward the entrance, and the width between the entrance and the exit is
W. All camera sensors have the same height and the distance of every two adjacent camera sensors is equivalent. For this deployment pattern, we can achieve a 3D barrier space with width
w that needs to be monitored. As a result, we obtain the barrier coverage as shown by the ’red space’ in
Figure 4.
Figure 5a,b are the vertical view of barrier coverage and the lateral view of barrier coverage, respectively.
In this paper, we consider a person to illustrate the intruder crossing the barrier area. When the intruder sneaks into the barrier area, the barrier coverage should effective capture the intruder’s face while meeting the requirement of resolution. Then the task is to detect and capture the intruder’s face (or the ROI).
4.2. Width of Barrier Coverage
Before discussing the width of barrier coverage, we give some definitions from our new resolution criterion.
As seen in
Figure 5b, one foot enters the FoVs of camera sensors when the intruder’s position is
. However, the intruder’s face which is what we are concerned about is still not observed. In other words, the ROI is the intruder’s face. Hence, the person needs to move to
, where
. However, the ROI may also not meet the requirement of high resolution when the person (including the person’s face) is within the camera sensors’ FoVs.
Definition 7 (Minimum effective vertical angle).
The minimum effective vertical angle is that the minimum value of effective vertical angle meets the required resolution when the target is moving in the FoV of camera sensor.
As seen in
Figure 3b, when the person is located at
, the resolution may not meet the requirement of the monitoring task. When the person arrives at
, the resolution satisfies the requirement, and the effective vertical angle is
.
Definition 8 (Maximum effective vertical angle).
The maximum effective vertical angle is that the maximum value of effective vertical angle meets the required resolution when the target is moving in the FoV of camera sensor.
The person continues to move to
, the effective vertical angle is
(
). When the person continues to move forward, the effective vertical angle will be larger. However, we can easily prove that the resolution of ROI captured by camera sensors will decrease (see Equation (
9)).
The effective vertical angle changes from
to
, according to that the position of the target changes from
to
, as shown in
Figure 5b. We can get
.
Thus, the width of barrier coverage meeting the task requirement of resolution is,
Note that the width of barrier coverage from Equation (
11) does not consider the effective horizontal angle
. In most cases, the ROI and the camera sensor cannot hold on the optimal effective horizontal angle
, since the intruder’s walking trajectory changes with time. In other words, only in the barrier area with width
w can we discuss the full-view coverage in camera sensor networks. This is an important difference from previous works.
4.3. Distance Between Two Adjacent Camera Sensors
The maximum of the effective resolution can be obtained when the ROI and the camera sensor hold on the optimal effective horizontal angle
. As is shown in
Figure 5a,
.
The distance between two adjacent camera sensors is,
4.4. Coverage Probability
Once an intruder comes into the barrier area, camera sensors will follow a probabilistic model to capture the intruder. Since the intruder’s trajectory is arbitrary, the resolution of ROI will change with different effective horizontal angles and different effective vertical angles.
Theorem 2. The maximum effective resolution based on ROI is, Proof of Theorem 2. When a target is moving in the barrier area, the ROI of the target is captured by camera sensors. We can get the effective width and the effective length from Equations (
1) and (
2). Since
and
, the ranges of the effective horizontal angle
and the effective vertical angle
are both
. When
and
,
gets the maximum value 1 and
gets the maximum value
. Besides, from Equation (
9), camera sensors in the barrier can achieve the maximum value
. In other words, the optimal effective horizontal angle is
and the optimal effective vertical angle is
. ☐
We set
as the desired resolution of the monitoring task. When
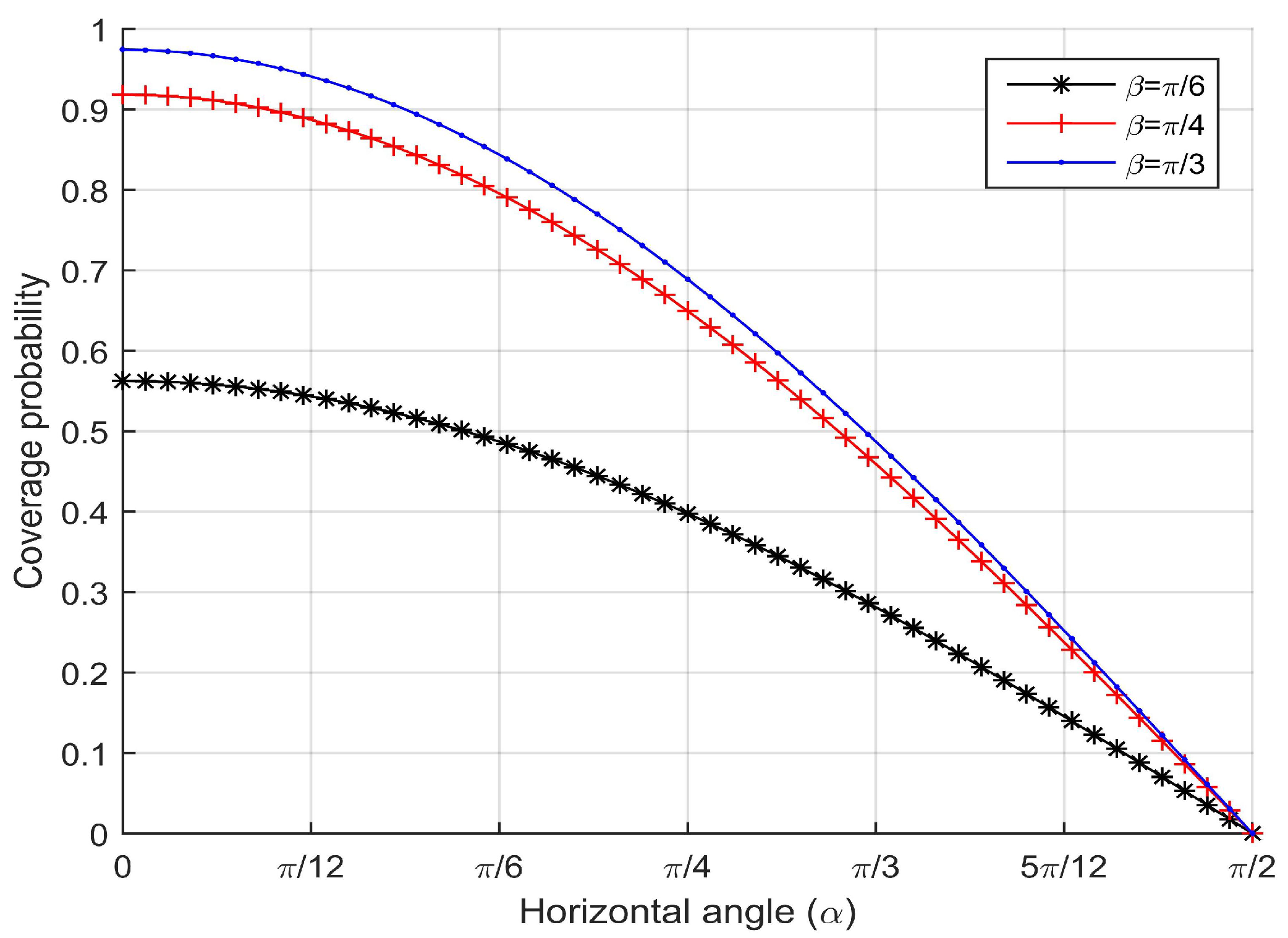
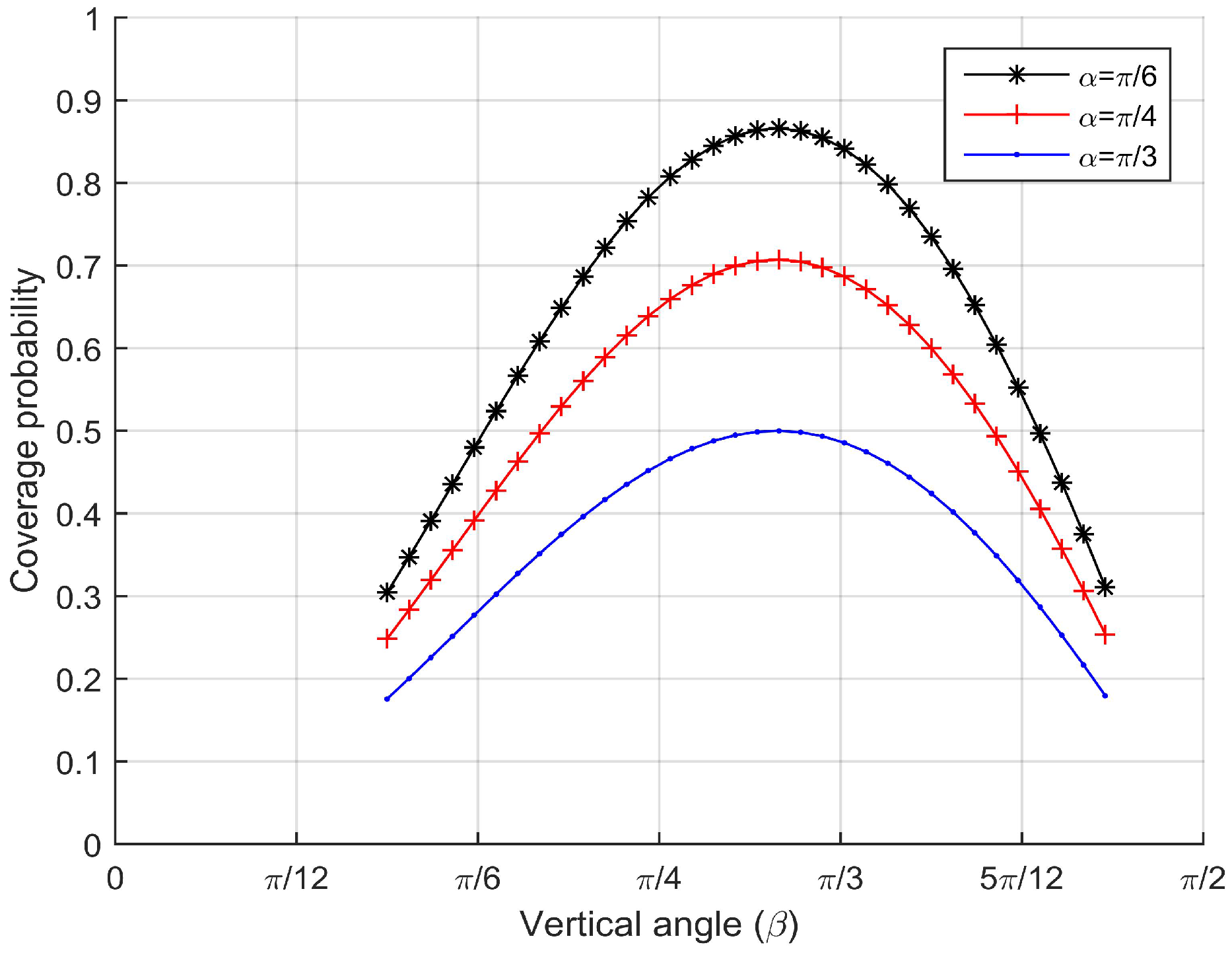
, we can get the coverage probability,
From Equation (
16), we find that the coverage probability is only related to
and
.
and
are the effective horizontal angle and the effective vertical angle between the camera sensor’s viewing direction and the target’s facing direction, respectively.
The resolution can be easily obtained by the coverage probability multiplies maximum effective resolution. Then, compared the computed result with the desired resolution of the monitoring task, our barrier coverage was successfully constructed with a 3D sensing model of camera sensors.
6. Discussion
In this section, we analyze the robustness of our barrier coverage and discuss how to ensure the coverage probability with our deployment strategy.
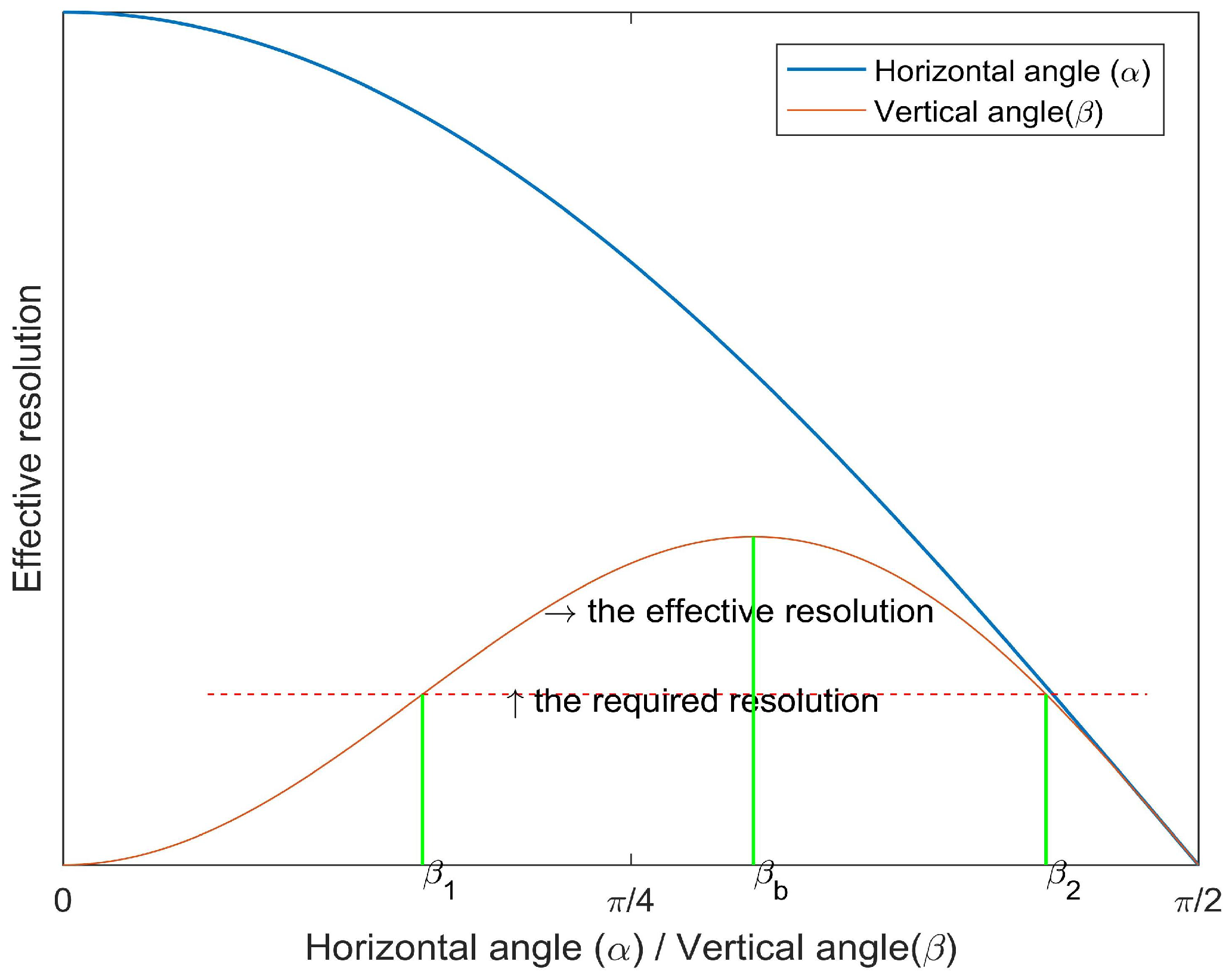
Our barrier coverage can not only capture the intruder that attempts to cross the barrier region, but also recognizes who is the intruder. As we mentioned above, to recognize an intruder, the resolution of the ROI captured by camera sensors should greater than the desired resolution
of the monitoring task. In other words, the effective resolution of the ROI should satisfy
. Since the camera sensors are deployed with a height from the ground, it is hard to keep stealthy for a sophisticated intruder (e.g., the intruder’s head can rotate down to escape from the cameras). However, the deployed cameras can capture and recognize the intruder successfully if the sophisticated intruder’s head keeps in a reasonable angle range in horizontal and vertical directions. As shown in
Figure 12, if the effective horizontal angle meets
and the effective vertical angle satisfies
, we will have the change to capture and recognize the intruder with our deployment strategy.
It is important for barrier coverage to capture all the intruders that attempt to cross the barrier region. However, it is a challenge for the barrier to capture and recognize every intruder. From the above analysis, given the camera’s parameters and the monitoring task, we find that the coverage probability is related to the horizontal and vertical angles between the camera sensors and the ROI. In some harsh environmental conditions, the challenge is how to deploy camera sensors to hold with coverage probability
even when a camera is damaged (e.g., due to hardware failure). In this worst case scenario, we can refer to the strategy of K-barrier coverage [
7,
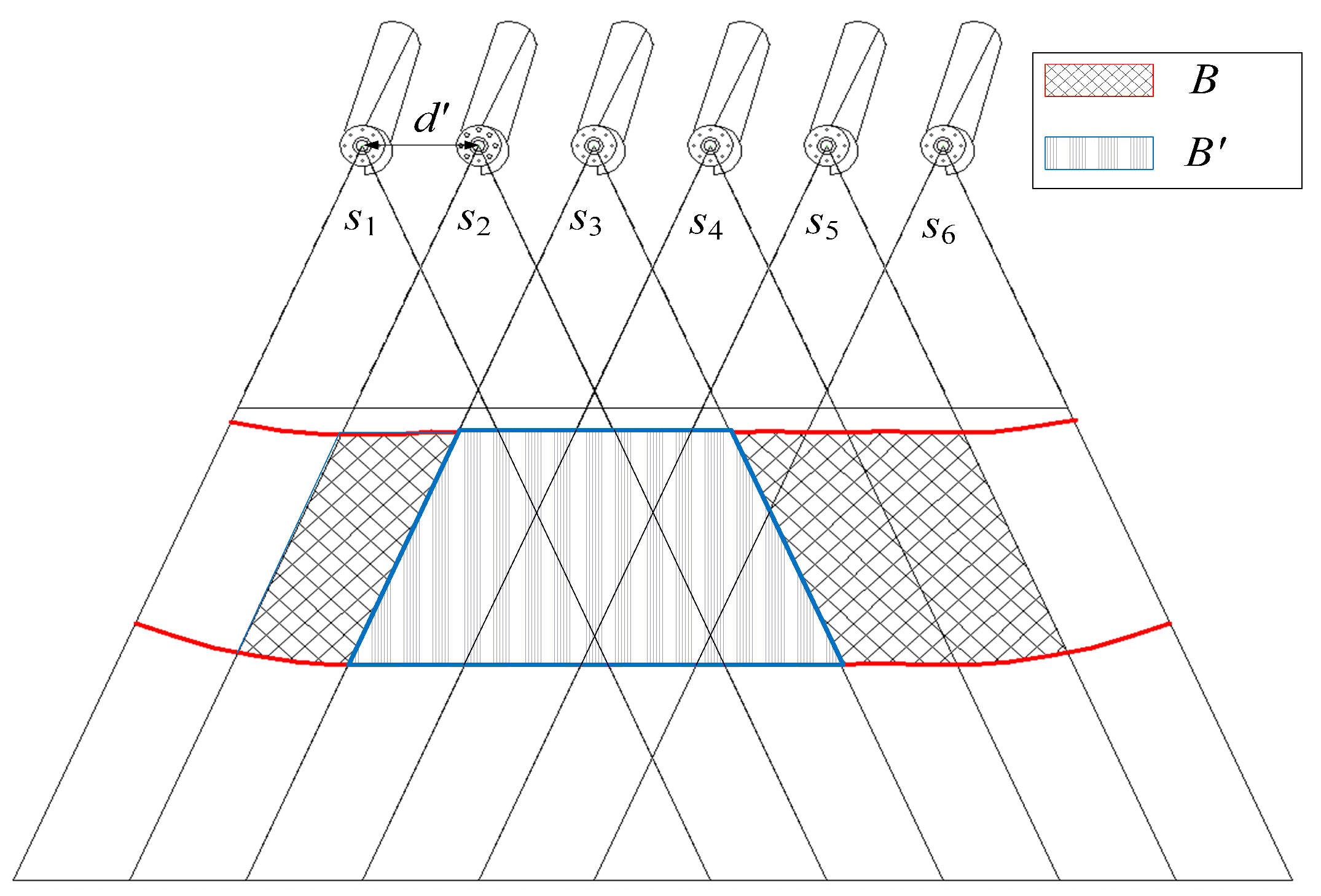
30] to construct fault tolerance barrier coverage. In our deployment strategy, we should shorten the distance between two adjacent camera sensors to construct K-barrier coverage. As depicted in
Figure 13, to enhance the fault tolerance of the camera sensor networks, the distance between two adjacent camera sensors satisfies
, and a set
of camera sensors are deployed to form two-barrier coverage
B. Thus, once an intruder attempts to cross the barrier region, at least two cameras will capture him. For example, if the camera sensor
malfunctions, the monitoring area
is also be captured by other cameras and guarantees the coverage probability.


{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}












