A Direct Coarray Interpolation Approach for Direction Finding


Abstract
:1. Introduction
2. Preliminaries
2.1. Signal Model
2.2. Coarray-Based MUSIC
3. The Direct Coarray Interpolation Approach for Direction Finding
- The hybrid approach requires two convex optimization problems to get the denoised covariance matrix, while the proposed approach only needs to solve one convex optimization problem. Thus, the computational complexity is significantly reduced.
- In the hybrid approach, after obtaining the covariance matrix of the received signal, we should first vectorize the covariance matrix and then select the entries corresponding to the unique lags in coarray. Only after these preprocessings can we further interpolate the holes and suppress the noise. However, in the proposed approach, the interpolated and denoised covariance matrix of coarray can be obtained directly from the covariance matrix of the received signal, thus significantly simplifying the processing.
- Compared with the coarray interpolation, the denoising operation is added by utilizing the low rank property of covariance matrix of coarray. Thus, the estimation accuracy is better than the coarray interpolation. As indicated by the numerical simulations, the performance is similar to—sometimes even better than—the hybrid approach.
- Finally, an interesting result indicated by the simulation results is that the angular resolution of the proposed approach is better than the hybrid approach and the coarray interpolation.
4. Simulation Results
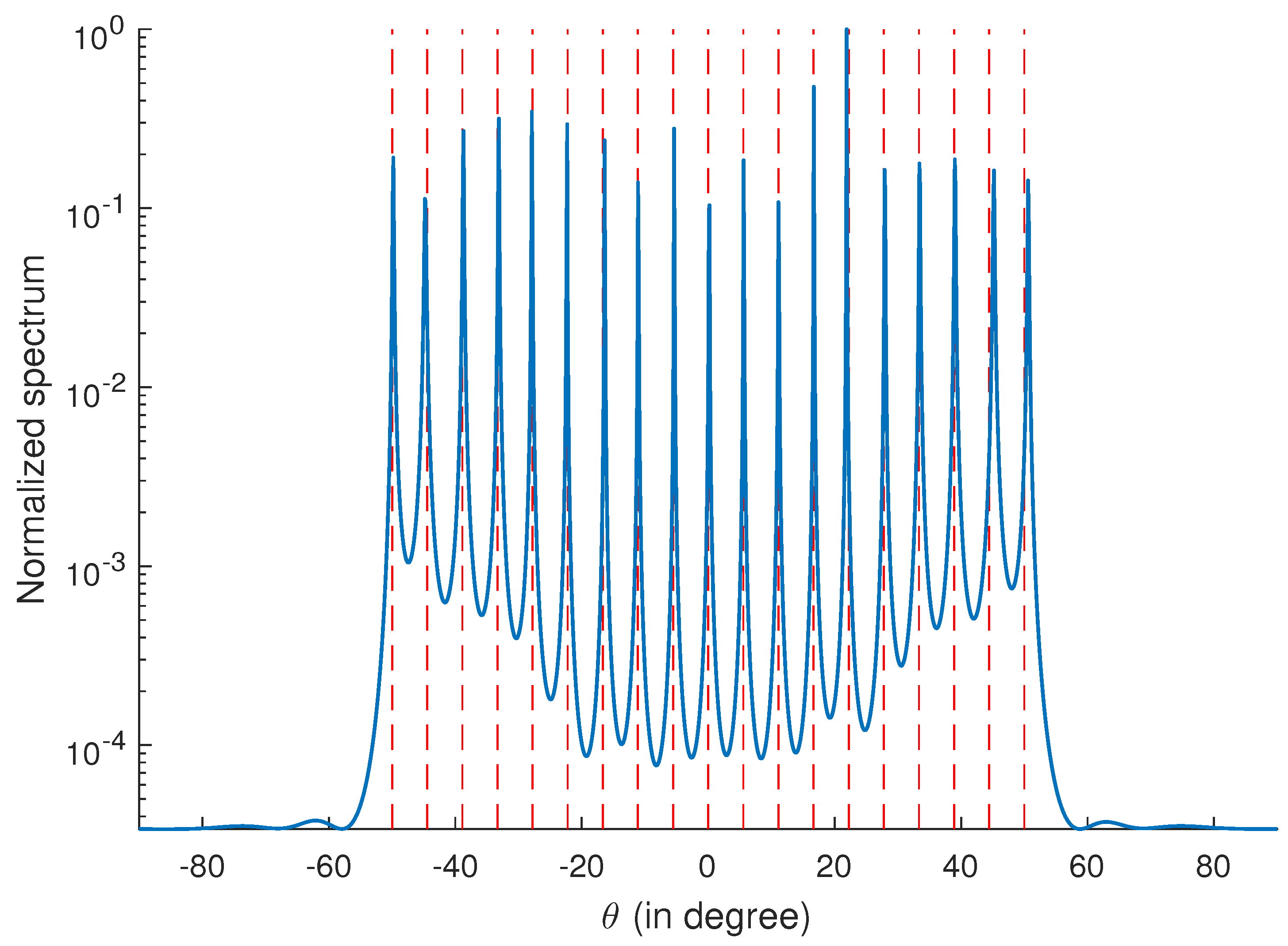
4.1. MUSIC Spectrum
4.2. Estimation Performance
4.3. Resolution Capability
5. Conclusions
Acknowledgments
Author Contributions
Conflicts of Interest
References
- Gu, Y.; Leshem, A. Robust adaptive beamforming based on interference covariance matrix reconstruction and steering vector estimation. IEEE Trans. Signal Process. 2012, 60, 3881–3885. [Google Scholar]
- Zhou, C.; Gu, Y.; He, S.; Shi, Z. A robust and efficient algorithm for coprime array adaptive beamforming. IEEE Trans. Veh. Technol. 2017. [Google Scholar] [CrossRef]
- Shi, Z.; Zhou, C.; Gu, Y.; Goodman, N.A. Source estimation using coprime array: A sparse reconstruction perspective. IEEE Sens. J. 2017, 17, 755–765. [Google Scholar] [CrossRef]
- Zhou, C.; Gu, Y.; Zhang, Y.D.; Shi, Z.; Jin, T.; Wu, X. Compressive sensing based coprime array direction-of-arrival estimation. IET Commun. 2017, 11, 1719–1724. [Google Scholar] [CrossRef]
- Gu, Y.; Goodman, N.A. Information-theoretic compressive sensing kernel optimization and Bayesian Cramér-Rao bound for time delay estimation. IEEE Trans. Signal Process. 2017, 65, 4525–4537. [Google Scholar] [CrossRef]
- Wang, B.; Zhang, Y.D.; Wang, W. Robust DOA estimation in the presence of miscalibrated sensors. IEEE Signal Process. Lett. 2017, 24, 1073–1077. [Google Scholar] [CrossRef]
- Wang, B.; Zhang, Y.D.; Wang, W. Robust group compressive sensing for DOA estimation with partially distorted observations. EURASIP J. Adv. Signal Process. 2016, 2016, 1–10. [Google Scholar] [CrossRef]
- Gu, Y.; Goodman, N.A.; Hong, S.; Li, Y. Robust adaptive beamforming based on interference covariance matrix sparse reconstruction. Signal Process. 2014, 96, 375–381. [Google Scholar] [CrossRef]
- Gu, Y.; Goodman, N.A.; Ashok, A. Radar target profiling and recognition based on TSI-optimized compressive sensing kernel. IEEE Trans. Signal Process. 2014, 62, 3194–3207. [Google Scholar]
- Vaidyanathan, P.P.; Pal, P. Sparse sensing with co-prime samplers and arrays. IEEE Trans. Signal Process. 2011, 59, 573–586. [Google Scholar] [CrossRef]
- Zhang, Y.D.; Moeness, G.A.; Braham, H. Sparsity-based DOA estimation using co-prime arrays. In Proceedings of the 2013 IEEE International Conference on Acoustics, Speech and Signal Processing (ICASSP), Vancouver, BC, Canada, 26–31 May 2013; pp. 3967–3971. [Google Scholar]
- Qin, S.; Zhang, Y.D.; Amin, M.G. Generalized coprime array configurations for direction-of-arrival estimation. IEEE Trans. Signal Process. 2015, 63, 1377–1390. [Google Scholar]
- Pal, P.; Vaidyanathan, P.P. Nested arrays: A novel approach to array processing with enhanced degrees of freedom. IEEE Trans. Signal Process. 2010, 58, 4167–4181. [Google Scholar] [CrossRef]
- Schmidt, R.O. Multiple emitter location and signal parameter estimation. IEEE Trans. Antennas Propag. 1986, 34, 276–280. [Google Scholar] [CrossRef]
- Roy, R.; Kailath, T. ESPRIT—Estimation of signal parameters via rotation invariance techniques. IEEE Trans. Acoust. Speech Signal Process. 1989, 17, 984–995. [Google Scholar] [CrossRef]
- Wang, M.; Nehorai, A. Coarrays, MUSIC, and the Cramér-Rao bound. IEEE Trans. Signal Process. 2017, 65, 933–946. [Google Scholar] [CrossRef]
- Abramovich, Y.I.; Spencer, N.K.; Gorokhov, A.Y. Positive-definite Toeplitz completion in DOA estimation for nonuniform linear antenna arrays. II. Partially augmentable arrays. IEEE Trans. Signal Process. 1999, 47, 1502–1521. [Google Scholar] [CrossRef]
- Liu, C.L.; Vaidyanathan, P.P.; Pal, P. Coprime coarray interpolation for DOA estimation via nuclear norm minimization. In Proceedings of the IEEE International Symposium Circuits and Systems, Montreal, QC, Canada, 22–25 May 2016; pp. 2639–2642. [Google Scholar]
- Guo, M.; Chen, T.; Wang, B. An improved DOA estimation approach using coarray interpolation and matrix denoising. Sensors 2017, 17, 1140. [Google Scholar] [CrossRef] [PubMed]
- Zhou, C.; Zhou, J. Direction-of-Arrival Estimation with Coarray ESPRIT for Coprime Array. Sensors 2017, 17, 1779. [Google Scholar] [CrossRef] [PubMed]
- Liu, C.L.; Vaidyanathan, P.P. Cramér-Rao bounds for coprime and other sparse arrays, which find more sources than sensors. Digit. Signal Process. 2017, 61, 43–61. [Google Scholar] [CrossRef]
- Liu, C.L.; Vaidyanathan, P.P. Remarks on the spatial smoothing step in coarray MUSIC. IEEE Signal Process. Lett. 2015, 22, 1438–1442. [Google Scholar] [CrossRef]
- Candès, E.J.; Recht, B. Exact matrix completion via convex optimization. Commun. ACM 2012, 55, 111–119. [Google Scholar] [CrossRef]
- Candès, E.J.; Tao, T. The power of convex relaxation: Near-optimal matrix completion. IEEE Trans. Inf. Theory 2010, 56, 2053–2080. [Google Scholar] [CrossRef]





{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Input | The received signal vector with time index |
| Output | DOA Estimation |
| Step 1 | Compute the covariance matrix . |
| Step 2 | Optimize (18) to obtain as . |
| Step 3 | Perform eigen-decomposition of and obtain the corresponding noise subspace . |
| Step 4 | Compute (15) and the Q largest solutions are the estimation of DOAs. |
| snapshots | 200 | 300 | … | 900 | 1000 |
| 12 | 11.5 | … | 8.5 | 8 |
| SNR (dB) | −8 | −6 | −4 | −2 | 0 | 2 | … | 16 |
| 15 | 14 | 13 | 12 | 10 | 10 | … | 10 |
© 2017 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Chen, T.; Guo, M.; Guo, L. A Direct Coarray Interpolation Approach for Direction Finding. Sensors 2017, 17, 2149. https://doi.org/10.3390/s17092149
Chen T, Guo M, Guo L. A Direct Coarray Interpolation Approach for Direction Finding. Sensors. 2017; 17(9):2149. https://doi.org/10.3390/s17092149
Chicago/Turabian StyleChen, Tao, Muran Guo, and Limin Guo. 2017. "A Direct Coarray Interpolation Approach for Direction Finding" Sensors 17, no. 9: 2149. https://doi.org/10.3390/s17092149
APA StyleChen, T., Guo, M., & Guo, L. (2017). A Direct Coarray Interpolation Approach for Direction Finding. Sensors, 17(9), 2149. https://doi.org/10.3390/s17092149