Calculation and Identification of the Aerodynamic Parameters for Small-Scaled Fixed-Wing UAVs

Abstract
:1. Introduction
2. Semi-Empirical Calculation
2.1. Longitudinal Channel Analysis
2.2. Lateral Channel Analysis
3. Parameter Identification
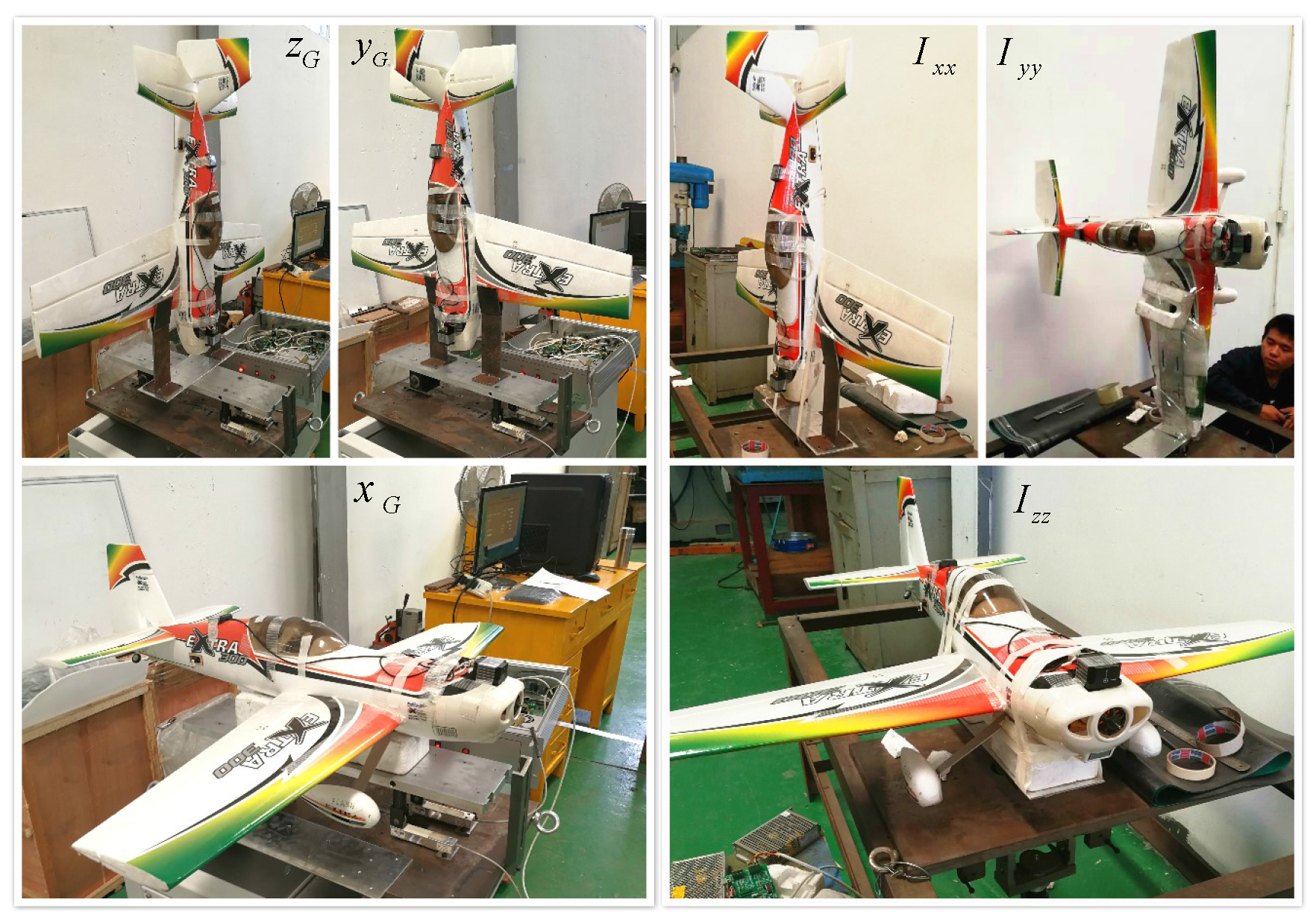
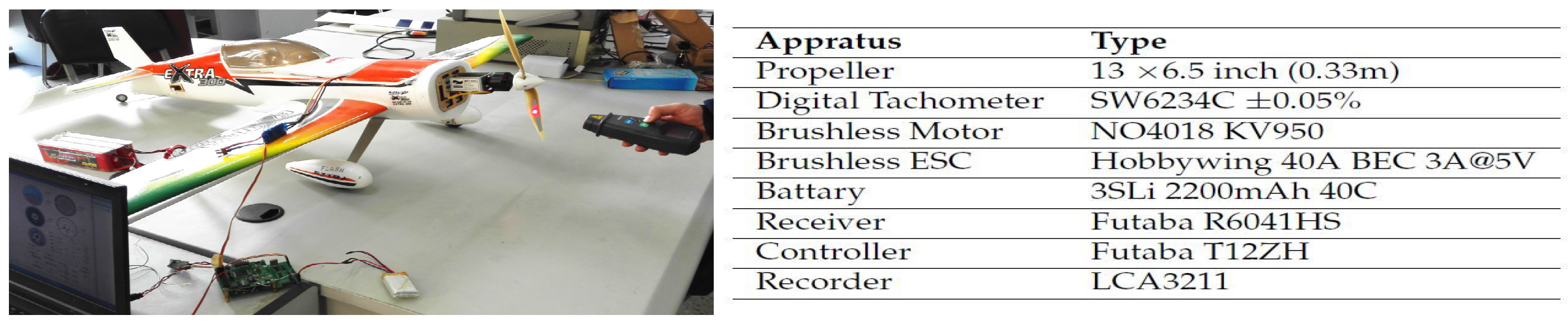
4. Experimental Preparation
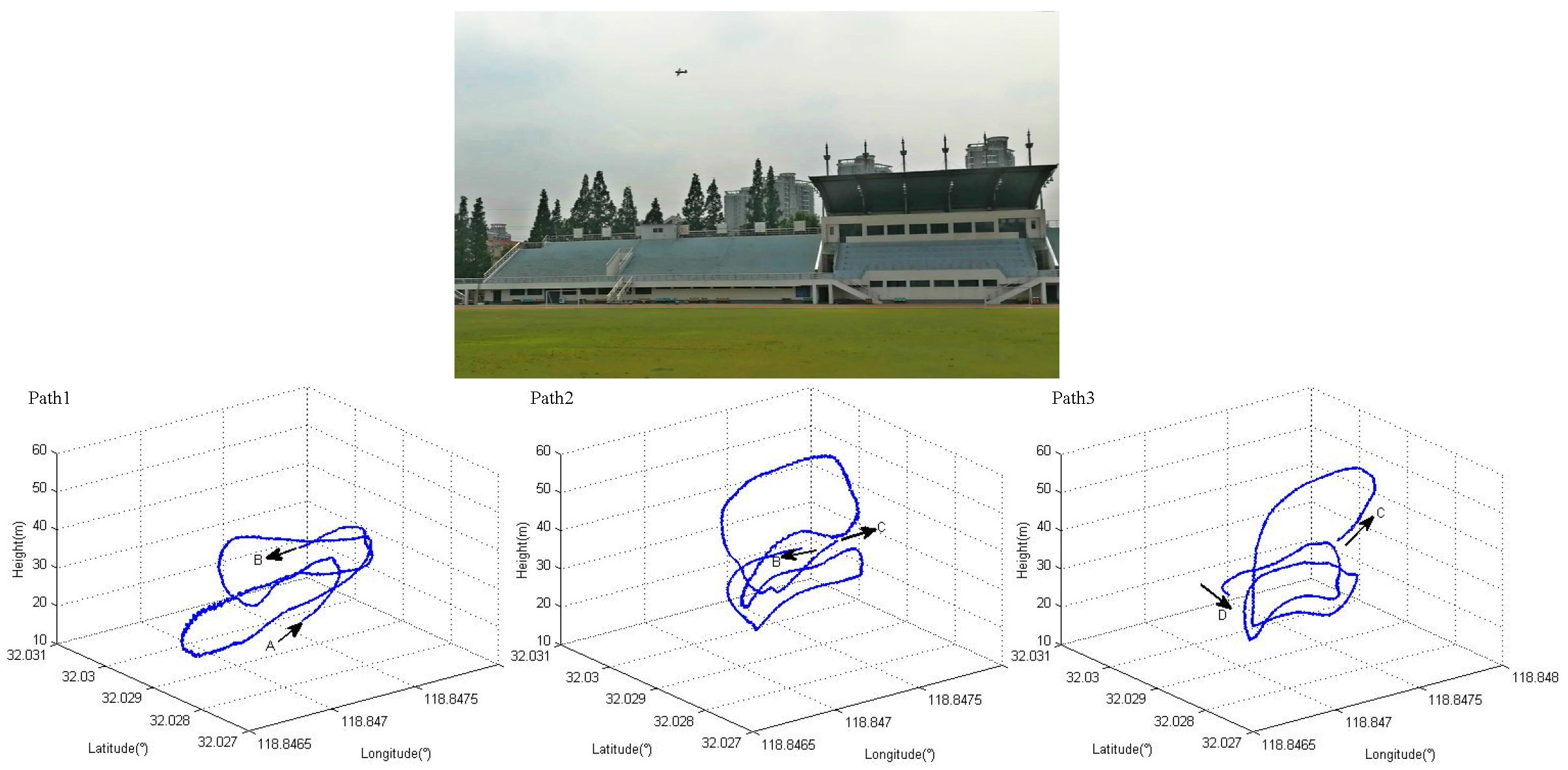
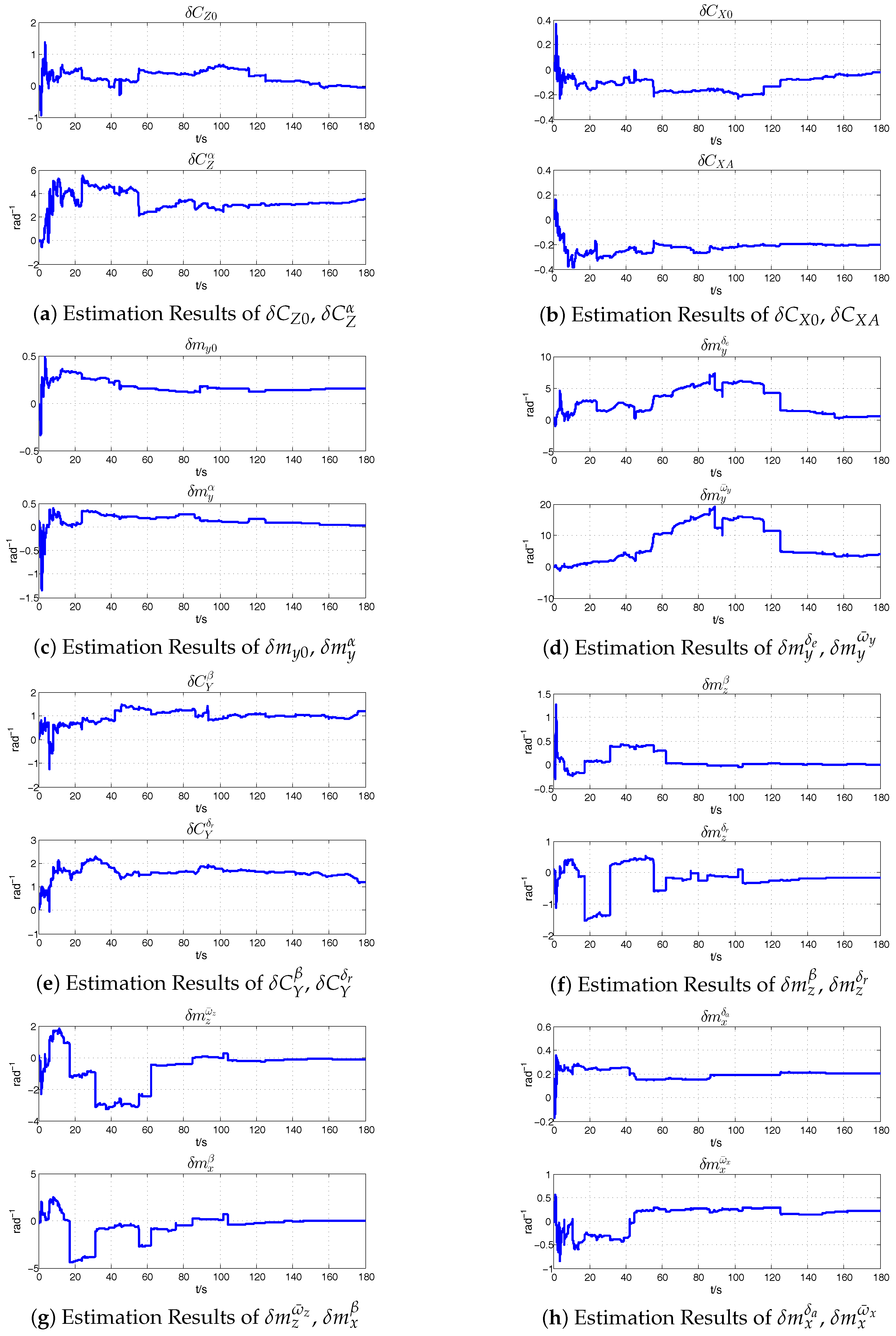
5. Flight Test and Analysis
6. Conclusions
- (1)
- Prepared with the related structural parameters and the position of gravity center, the aerodynamic derivatives are semi-empirically calculated based on fundamental aerodynamics. The simplified structure and the specific flight condition reduce the complexity. So, the aerodynamic analysis could be operated in a fast, effective and low-cost way to originally provide a serial rational parameters. The paper introduces and analyzes the entire course of the calculating of the longitudinal and lateral derivatives, and it is helpful for the modeling of all the other similar small aircraft;
- (2)
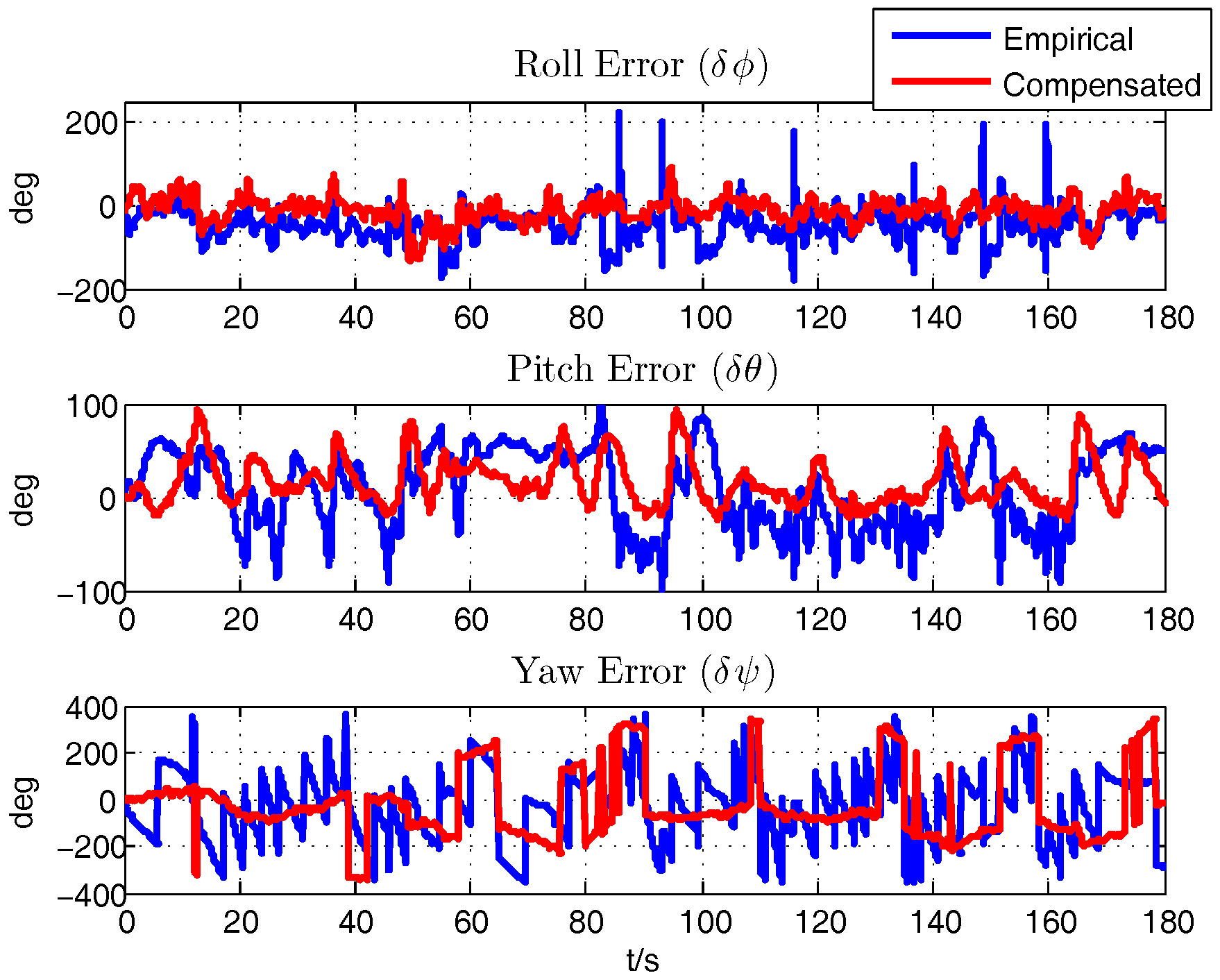
- The initially obtained parameters is further identified or compensated with the real flight data. Given the airborne MEMS-based inertial sensors with finite precision, the relatively accurate velocity and attitude from the integration of INS/GPS was employed as observations to estimate the error of the aerodynamic parameters. It may have the problem of lack of observations, but it could be solved with the abundant maneuvering flight. Then, the aerodynamic parameters could be corrected with the estimated error of the derivatives and the aircraft model could be more accurate and reliable.
Acknowledgments
Author Contributions
Conflicts of Interest
Nomenclature
| Abbreviation | |
| Aircraft Dynamic Model | |
| Aircraft Motion Model | |
| Computational Fluid Dynamics | |
| Extended Kalman Filter | |
| Global Positioning System | |
| Inertial Measurement Unit | |
| Inertial Navigation System | |
| Micro-Electro Mechanical Systems | |
| Maximum Likelihood Estimation | |
| Pulse Width Modulation | |
| Unmanned Aerial Vehicle | |
| Unscented Kalman Filter | |
| Coordinate | |
| Earth-surface inertial reference frame pointing North, East, Down | |
| Aircraft-body coordinate frame | |
| Wind coordinate frame | |
| Coordinate rotation matrix from g to b | |
| Coordinate rotation matrix from a to b | |
| Aircraft | |
| m | Total mass, kg |
| I | Moment of inertia, kg·m |
| Position of center of gravity, m | |
| Aerodynamic focus, m | |
| Aerodynamic center of wing, body and wing-body, m | |
| Aerodynamic center of horizontal tail and elevator, m | |
| l | Wing span, m |
| Mean aerodynamic chord, m | |
| S | Reference area, m |
| Cantilever wing area, m | |
| Fuselage maximum cross-sectional area, m | |
| Horizontal tail area, m | |
| Aspect ratio | |
| Fuselage diameter-to-wing span ratio | |
| D | Diameter of propeller, m |
| Incidence angle of wing, horizontal tail, degree | |
| Wing-body interference factor | |
| Horizontal tail-body interference factor | |
| Thrust of propeller, N | |
| Aerodynamic forces in wind coordinates, Drag, Side Force and Lift, N | |
| Aerodynamic moments in body coordinates, Roll, Pitch and Yaw moment, N· m | |
| Dimensionless thrust coefficients | |
| Dimensionless aerodynamic-force coefficients | |
| Dimensionless aerodynamic-moment coefficients | |
| Airspeed, m/s | |
| Angle-of-attack, rad | |
| Angle of sideslip, rad | |
| Angle of downwash, rad | |
| Air density, kg/m | |
| Q | Dynamic pressure, Pa |
| Airflow block factor | |
| Deflection angle of elevator, rudder and aileron, rad | |
| Revolutions per second of propeller, r/s | |
| PWM width corresponding to the channel of thrust, elevator, rudder and aileron | |
| Roll, pitch, yaw angle rad | |
| Body axis velocities, m/s | |
| Body axis angular rates, rad/s | |
References
- Austin, R. Unmanned Aircraft Systems: UAVS Design, Development and Deployment, 1st ed.; John Wiley & Sons: Chichester, UK, 2011. [Google Scholar]
- Ducard, G.J. Fault-Tolerant Flight Control and Guidance Systems: Practical Methods for Small Unmanned Aerial Vehicles; Springer Science & Business Media: London, UK, 2009. [Google Scholar]
- Klein, V.; Morelli, E.A. Aircraft System Identification: Theory and Practice; American Institute of Aeronautics and Astronautics: Reston, VA, USA, 2006. [Google Scholar]
- Marqués, P.; Da Ronch, A. Advanced Uav Aerodynamics, Flight Stability and Control: Novel Concepts, Theory and Applications; John Wiley & Sons: Southport, UK, 2017. [Google Scholar]
- Wisnoe, W.; Nasir, R.E.M.; Kuntjoro, W.; Mamat, A.M. Wind tunnel experiments and CFD analysis of Blended Wing Body (BWB) Unmanned Aerial Vehicle (UAV) at mach 0.1 and mach 0.3. In Proceedings of the 13th International Conference on Aerospace Sciences & Aviation Technology, ASAT-13, Cairo, Egypt, 26–28 May 2009. [Google Scholar]
- Williams, J.E.; Vukelich, S.R. The USAF Stability and Control DATCOM, Users Manual; McDonnell Douglas Astronautics Company: Berkeley, MO, USA, 1999; Volume 1. [Google Scholar]
- STABILITY, USAF. Control Datcom. In Air Force Flight Dynamics Laboratory, Wright-Patterson Air Force Base, Ohio. 1972. [Google Scholar]
- Arifianto, O.; Farhood, M. Development and modeling of a low-cost unmanned aerial vehicle research platform. J. Intell. Robot. Syst. 2015, 80, 139. [Google Scholar] [CrossRef]
- Etkin, B. Dynamics of Atmospheric Flight; Dover Publications: New York, NY, USA, 2005. [Google Scholar]
- Nelson, R.C. Flight Stability and Automatic Control, 2nd ed.; WCB/McGraw Hill: New York, NY, USA, 1998. [Google Scholar]
- Phillips, W.F. Mechanics of Flight; John Wiley & Sons: Chichester, UK, 2004. [Google Scholar]
- Schmidt, L.V. Introduction to Aircraft Flight Dynamics; American Institute of Aeronautics and Astronautics (AIAA): Reston, VA, USA, 1998. [Google Scholar]
- Lebedev, A. Flight Dynamics of the Unmanned Aerial Vehicles; Zhang, B., Translator; National Defence Industry Press: Beijing China, 1964. [Google Scholar]
- Xu, M.; An, X. Analysis and Calculation of Aerodynamic Characteristics of Aircraft; Northwestern Polytechnic University Press: Xi’an, China, 2012. [Google Scholar]
- Tischler, M.B.; Remple, R.K. Aircraft and Rotorcraft System Identification; AIAA Education Series; American Institute of Aeronautics and Astronautics: Reston, VA, USA, 2006. [Google Scholar]
- Ljung, L. System identification. In Signal Analysis and Prediction; Springer: New York, NY, USA, 1998; pp. 163–173. [Google Scholar]
- Guo, M.; Su, Y.; Gu, D. System identification of the quadrotor with inner loop stabilisation system. Int. J. Model. Identif. Control 2017, 28, 245–255. [Google Scholar] [CrossRef]
- Ghosh, A.; Raisinghani, S. Frequency-domain estimation of parameters from flight data using neural networks. J. Guid. Control Dyn. 2001, 24, 525–530. [Google Scholar] [CrossRef]
- Chen, S.; Billings, S. Neural networks for nonlinear dynamic system modelling and identification. Int. J. Control 1992, 56, 319–346. [Google Scholar] [CrossRef]
- Morelli, E.A. Real-time aerodynamic parameter estimation without air flow angle measurements. J. Aircr. 2012, 49, 1064–1074. [Google Scholar] [CrossRef]
- Dorobantu, A.; Ozdemir, A.A.; Turkoglu, K.; Freeman, P.; Murch, A.; Mettler, B.; Balas, G. Frequency domain system identification for a small, low-cost, fixed-wing uav. In Proceedings of the AIAA Guidance, Navigation, and Control Conference, Portland, OR, USA, 8–11 August 2011; p. 6719. [Google Scholar]
- Dorobantu, A.; Murch, A.; Mettler, B.; Balas, G. System identification for small, low-cost, fixed-wing unmanned aircraft. J. Aircr. 2013. [Google Scholar] [CrossRef]
- Garcia-Velo, J.; Walker, B.K. Aerodynamic parameter estimation for high-performance aircraft using extended Kalman filtering. J. Guid. Control Dyn. 1997, 20, 1257–1260. [Google Scholar] [CrossRef]
- Tang, Y.; Wu, Y.; Wu, M.; Wu, W.; Hu, X.; Shen, L. INS/GPS integration: Global observability analysis. IEEE Trans. Veh. Technol. 2009, 58, 1129–1142. [Google Scholar] [CrossRef]
- Jategaonkar, R. Flight Vehicle System Identification: A Time Domain Methodology; American Institute of Aeronautics and Astronautics: Reston, VA, USA, 2006; Volume 216. [Google Scholar]
- Von Hoffer, N. System Identification of a Small Low-Cost Unmanned Aerial Vehicle Using Flight Data from Low-Cost Sensors; Utah State University: Logan, UT, USA, 2015. [Google Scholar]
- Chowdhary, G.; Jategaonkar, R. Aerodynamic parameter estimation from flight data applying extended and unscented Kalman filter. Aerosp. Sci. Technol. 2010, 14, 106–117. [Google Scholar] [CrossRef]
- Koifman, M.; Bar-Itzhack, I. Inertial navigation system aided by aircraft dynamics. IEEE Trans. Control Syst. Technol. 1999, 7, 487–493. [Google Scholar] [CrossRef]
- Yang, Z.; Igarashi, H.; Martin, M.; Hu, H. An experimental investigation on aerodynamic hysteresis of a low-Reynolds number airfoil. In Proceedings of the 46th AIAA Aerospace Sciences Meeting and Exhibit, Reno, NV, USA, 7–10 January 2008. [Google Scholar]
- Xsens, T. MTi-G User Manual and Technical Documentation; Xsens Technologies B.V.: Enschede, The Netherlands, 2010. [Google Scholar]
- Jung, D.; Levy, E.; Zhou, D.; Fink, R.; Moshe, J.; Earl, A.; Tsiotras, P. Design and development of a low-cost test-bed for undergraduate education in UAVs. In Proceedings of the 44th IEEE Conference on Decision and Control, and 2005 European Control Conference, Seville, Spain, 12–15 December 2005; pp. 2739–2744. [Google Scholar]
- Owens, D.B.; Cox, D.E.; Morelli, E.A. Development of a low-cost sub-scale aircraft for flight research: The FASER project. In Proceedings of the 25th AIAA Aerodynamic Measurement Technology and Ground Testing Conference, Fluid Dynamics and Co-located Conferences, San Francisco, CA, USA, 5–8 June 2006. [Google Scholar]









{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Forces/Moments | Formulas |
|---|---|
| Thrust | |
| Lift Z | |
| Drag X | |
| Pitch Moment | |
| Side Force Y | |
| Yaw Moment | |
| Roll Moment |
| Structural Parameters | m, m, m | ||
| Propeller Parameters | kg/m, m | ||
| Inertia Parameters | kg, m, m, m kg·m | ||
| Aerodynamic Parameters | |||
| rad | rad | ||
| rad | rad | ||
| rad | |||
| rad | rad | rad | |
| rad | rad | rad | |
| rad | rad | ||
| rad | rad | ||
| rad | |||
| Parameter | Result | Parameter | Result |
|---|---|---|---|
| 0.000 | 1.000 | ||
| 3.000 | 1.600 | ||
| 0.000 | 0.000 | ||
| −0.100 | −0.166 | ||
| −0.200 | −0.110 | ||
| 0.150 | 0.147 | ||
| 0.100 | 0.000 | ||
| 1.000 | 0.200 | ||
| 5.000 | 0.000 | ||
| 0.200 | |||
| 0.593 |
© 2018 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Shen, J.; Su, Y.; Liang, Q.; Zhu, X. Calculation and Identification of the Aerodynamic Parameters for Small-Scaled Fixed-Wing UAVs. Sensors 2018, 18, 206. https://doi.org/10.3390/s18010206
Shen J, Su Y, Liang Q, Zhu X. Calculation and Identification of the Aerodynamic Parameters for Small-Scaled Fixed-Wing UAVs. Sensors. 2018; 18(1):206. https://doi.org/10.3390/s18010206
Chicago/Turabian StyleShen, Jieliang, Yan Su, Qing Liang, and Xinhua Zhu. 2018. "Calculation and Identification of the Aerodynamic Parameters for Small-Scaled Fixed-Wing UAVs" Sensors 18, no. 1: 206. https://doi.org/10.3390/s18010206
APA StyleShen, J., Su, Y., Liang, Q., & Zhu, X. (2018). Calculation and Identification of the Aerodynamic Parameters for Small-Scaled Fixed-Wing UAVs. Sensors, 18(1), 206. https://doi.org/10.3390/s18010206