A Study on the Model of Detecting the Variation of Geomagnetic Intensity Based on an Adapted Motion Strategy


Abstract
1. Introduction
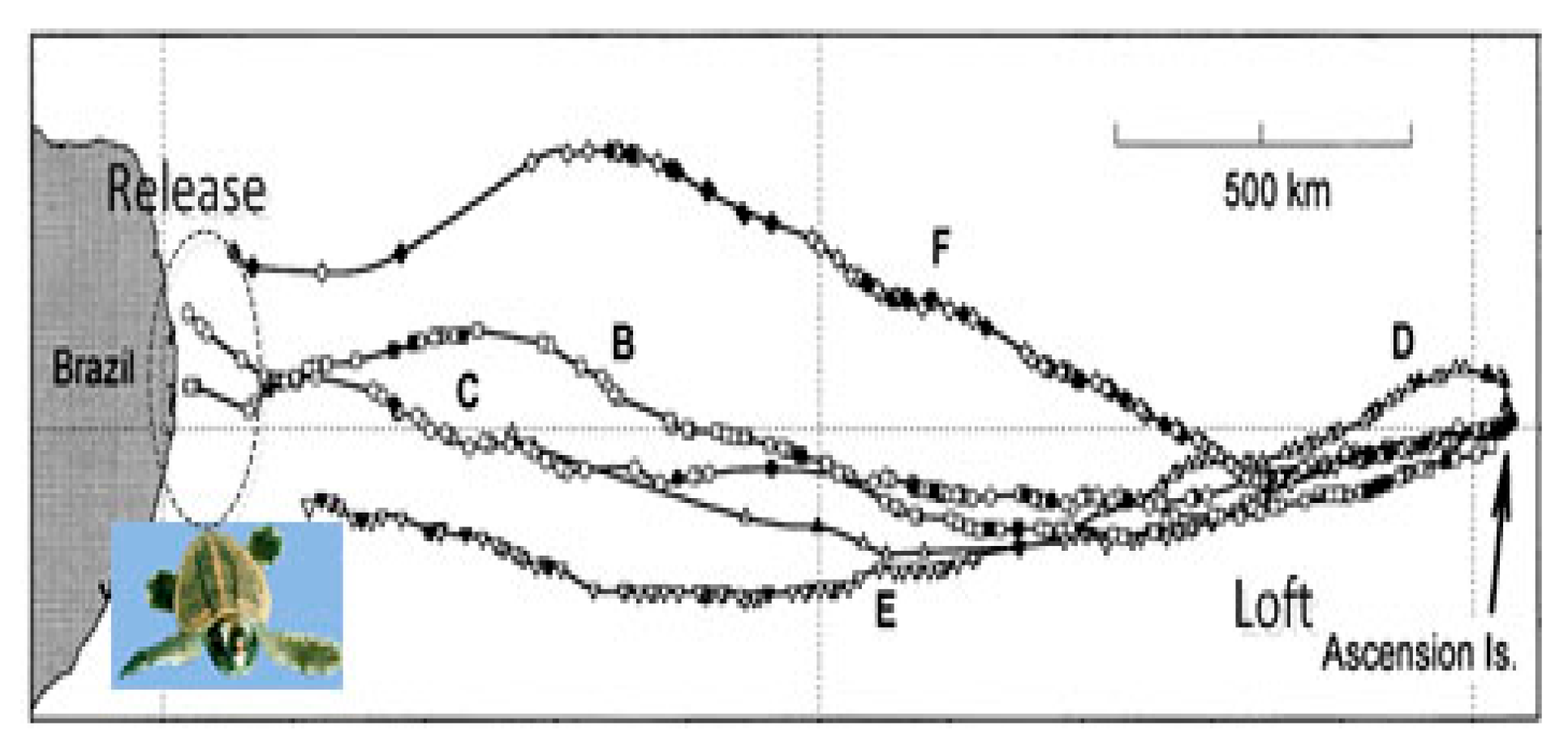
2. Biological Evidence
3. Problem Formulation
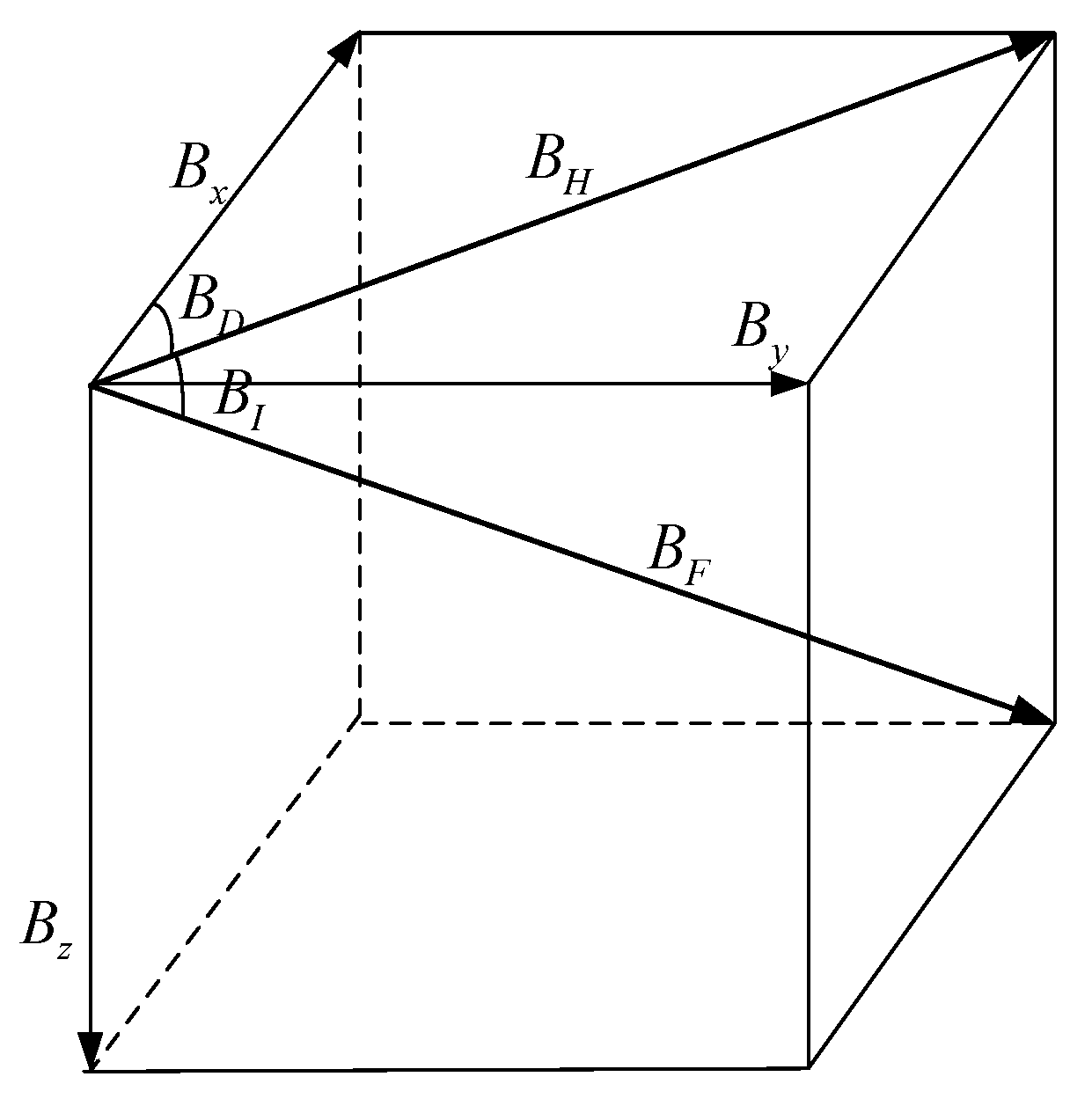
3.1. Mathematical Model
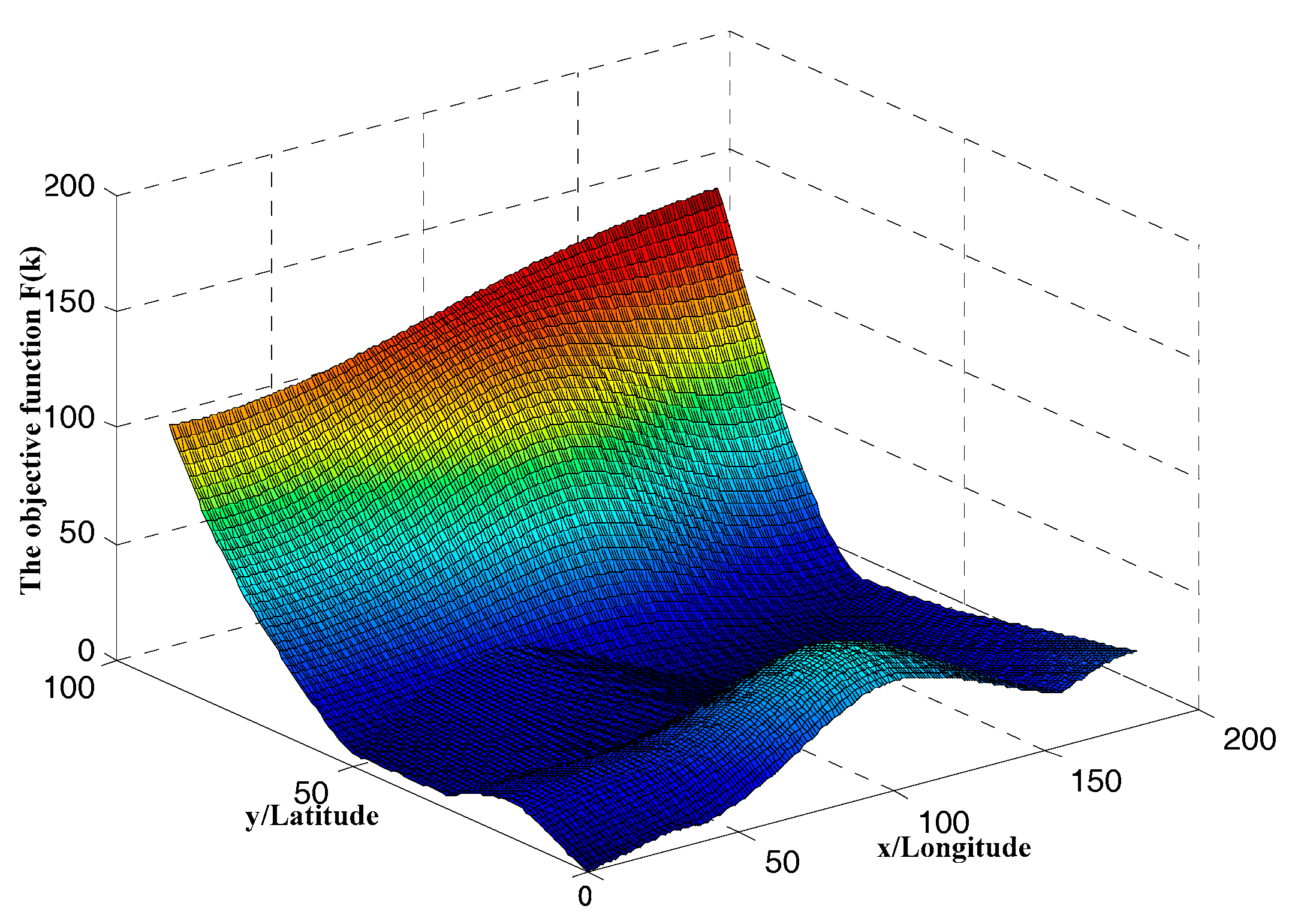
3.2. General Regularized the Objective Function
4. Method
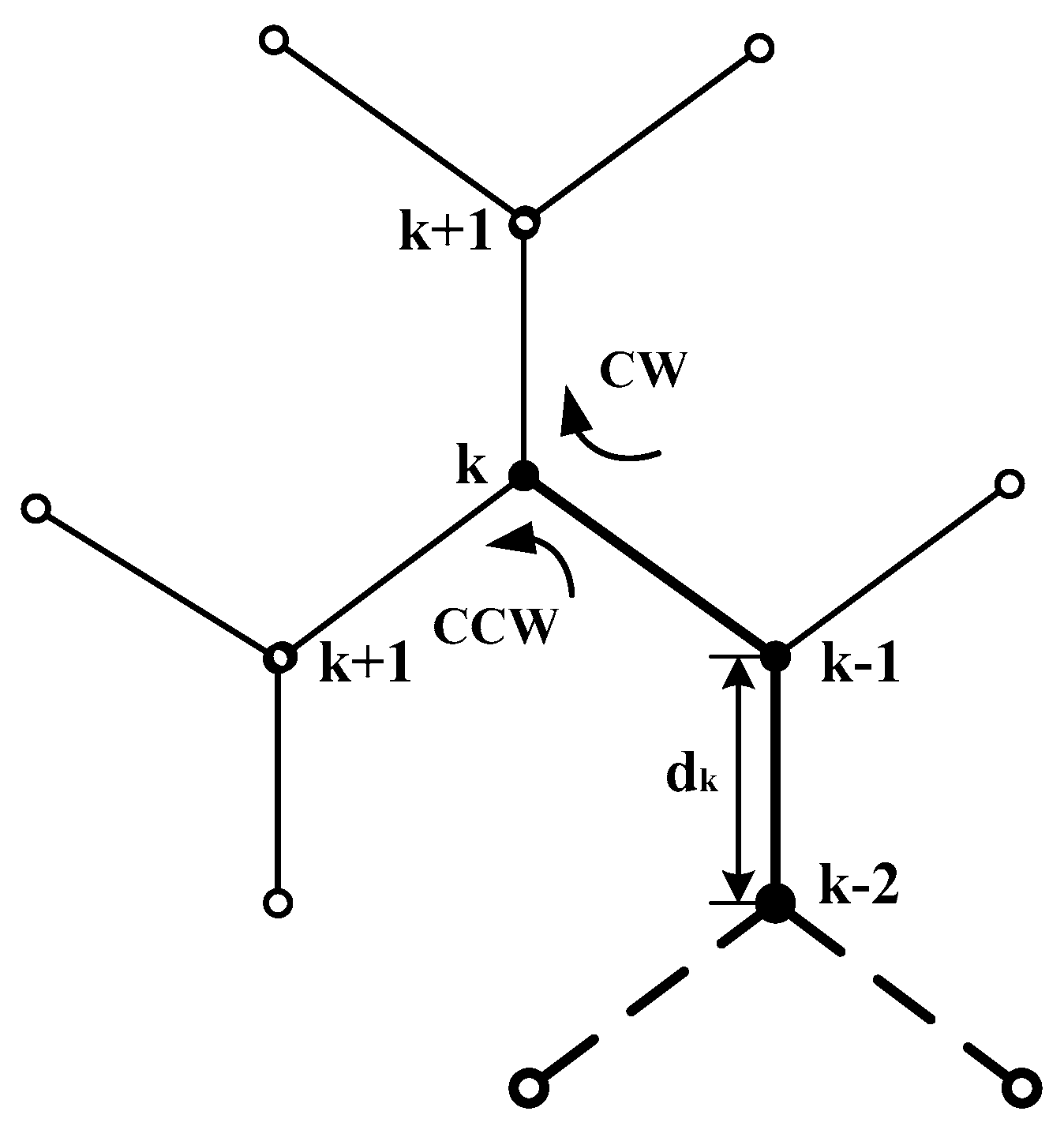
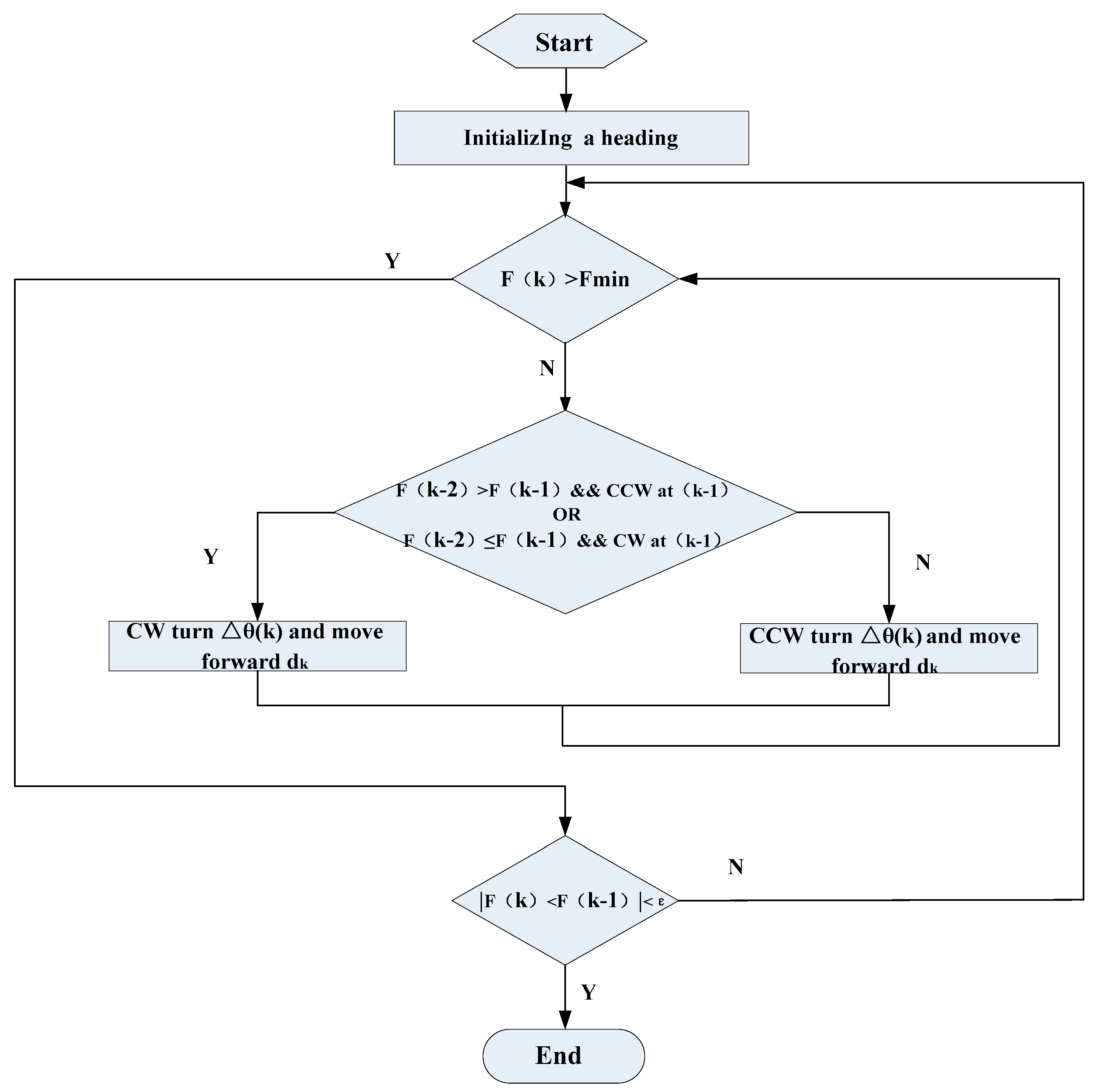
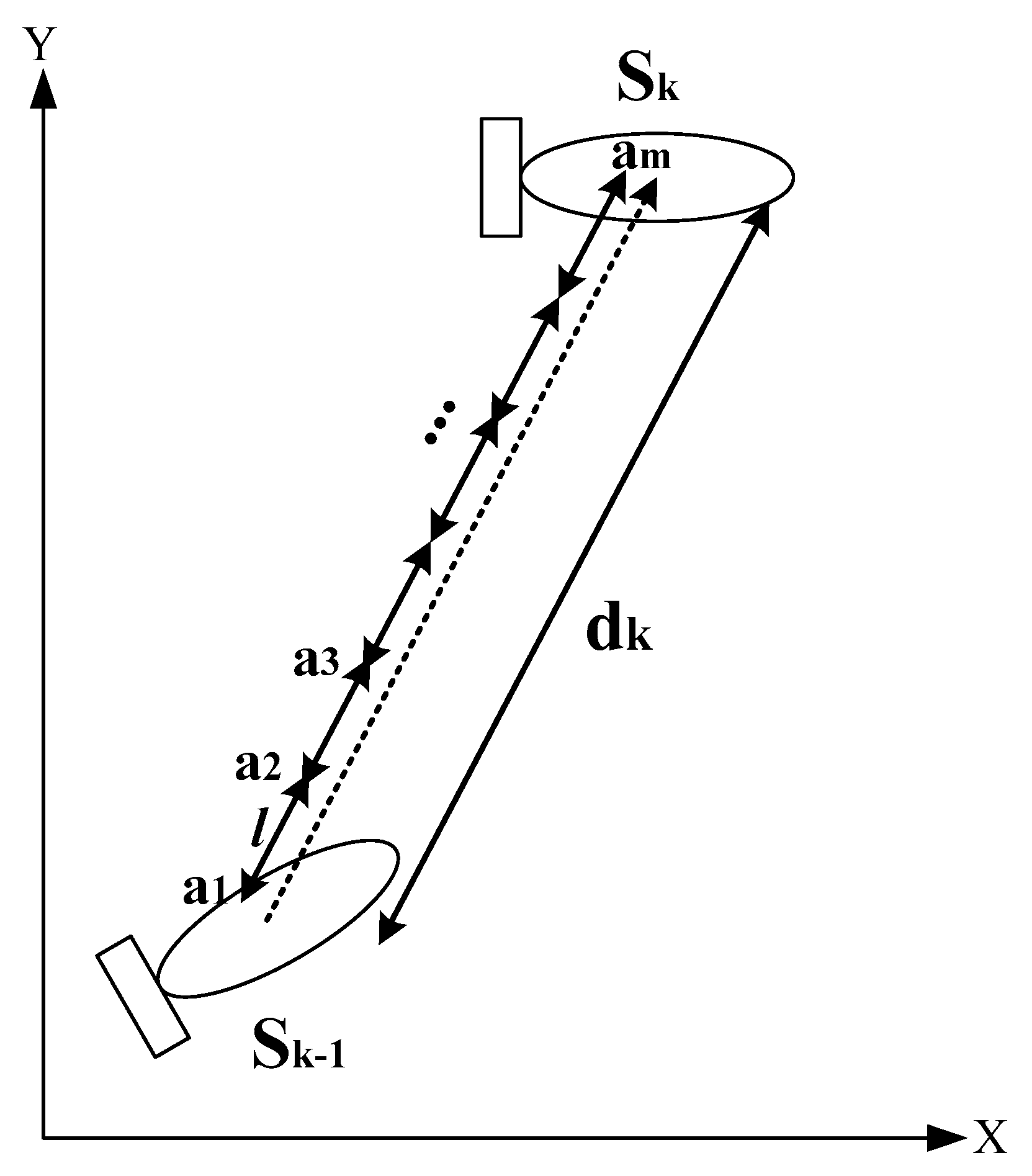
4.1. Search Strategy of AMSA
| Algorithm 1: The choice mechanism of the turning direction |
| repeat { |
| If ( and the rotation direction is anticlockwise (CCW) at |
| or |
| and the rotation direction is clockwise (CW) at ) |
| Then rotate CW and move forward |
| Else rotate CCW and move forward |
| } |
4.2. Online Estimation of Measurement Noise
5. Results
5.1. Simulation Setup
5.2. Simulation Results
5.3. Performance Evaluation of the Algorithms
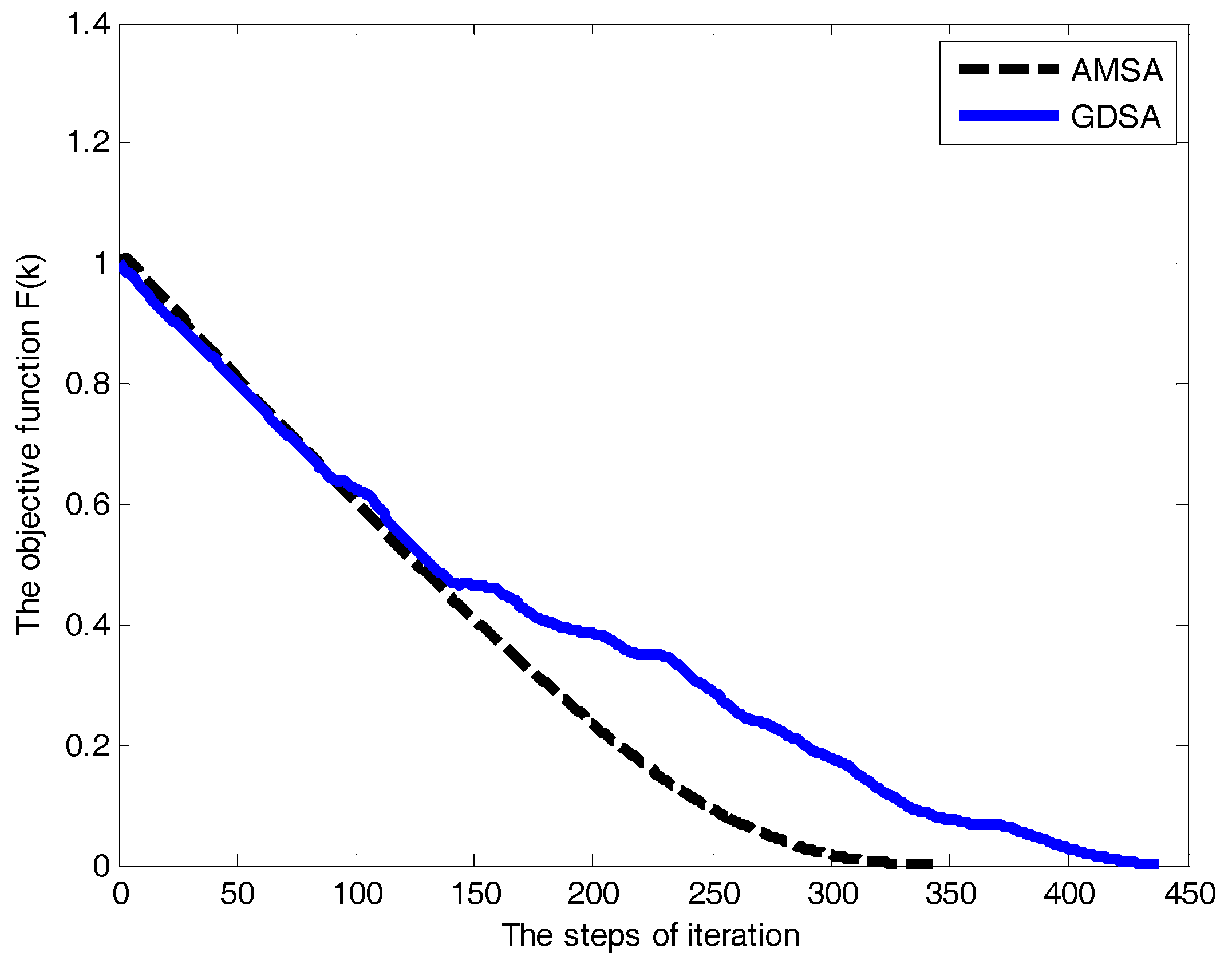
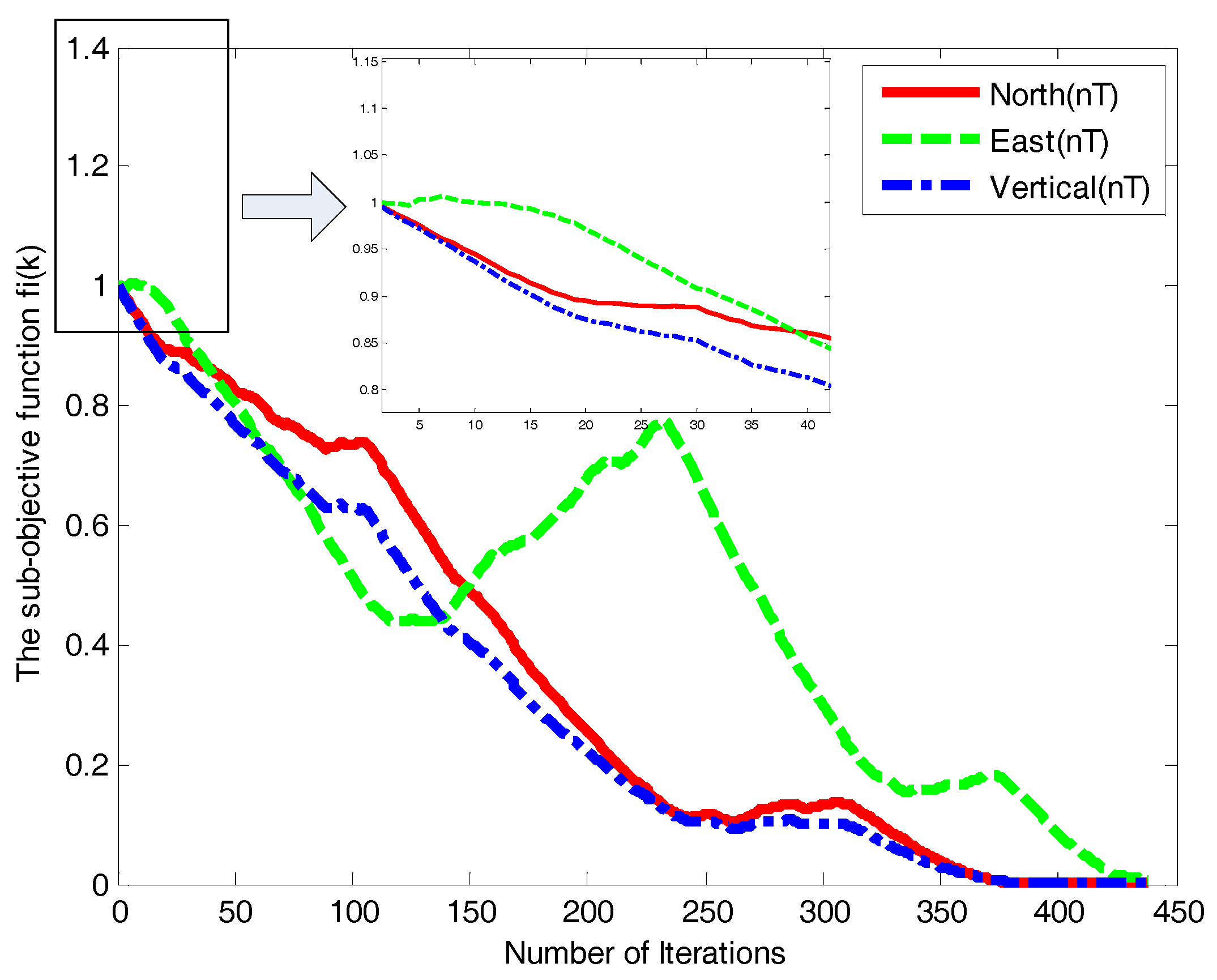
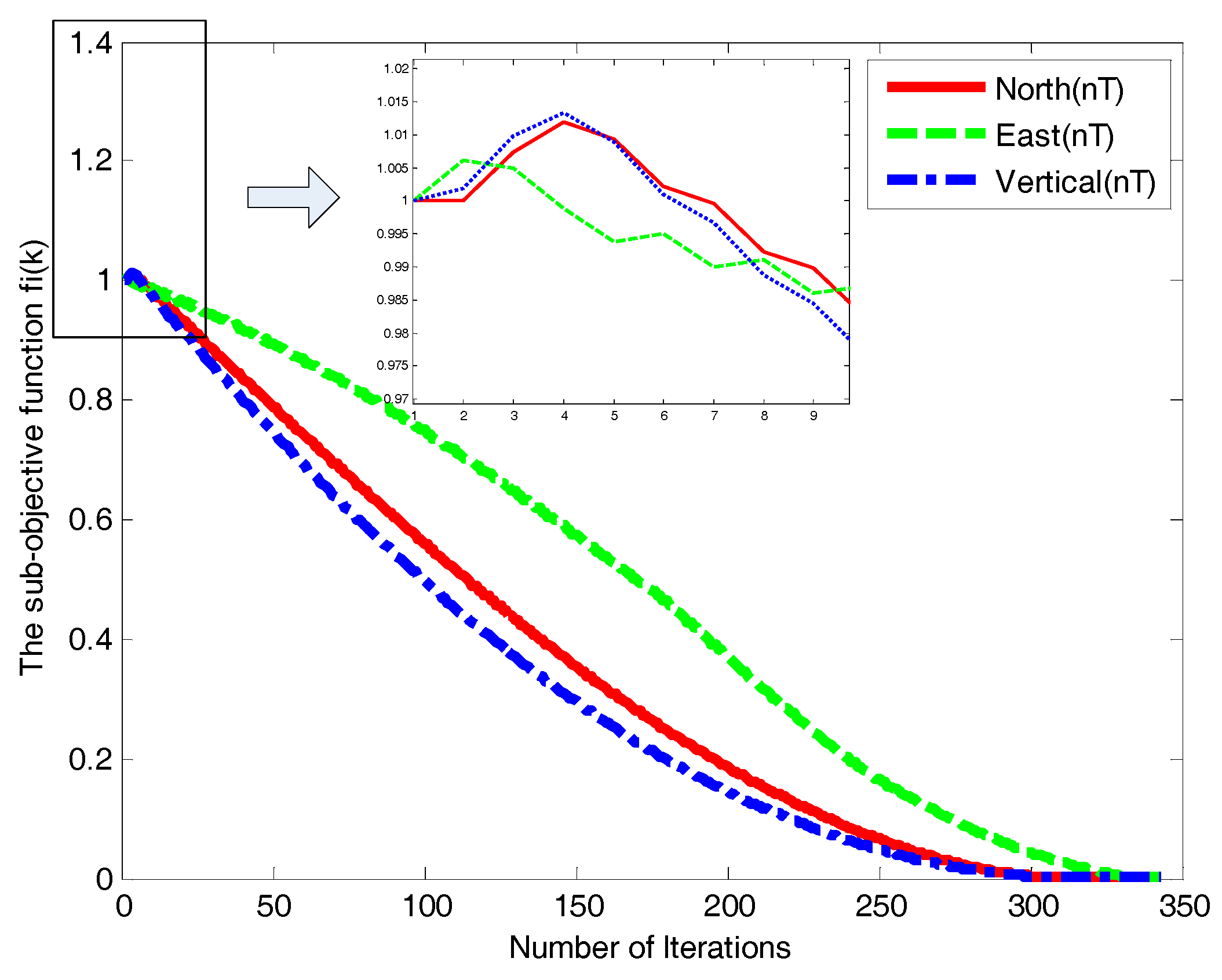
5.3.1. Convergence Analysis
5.3.2. Robustness
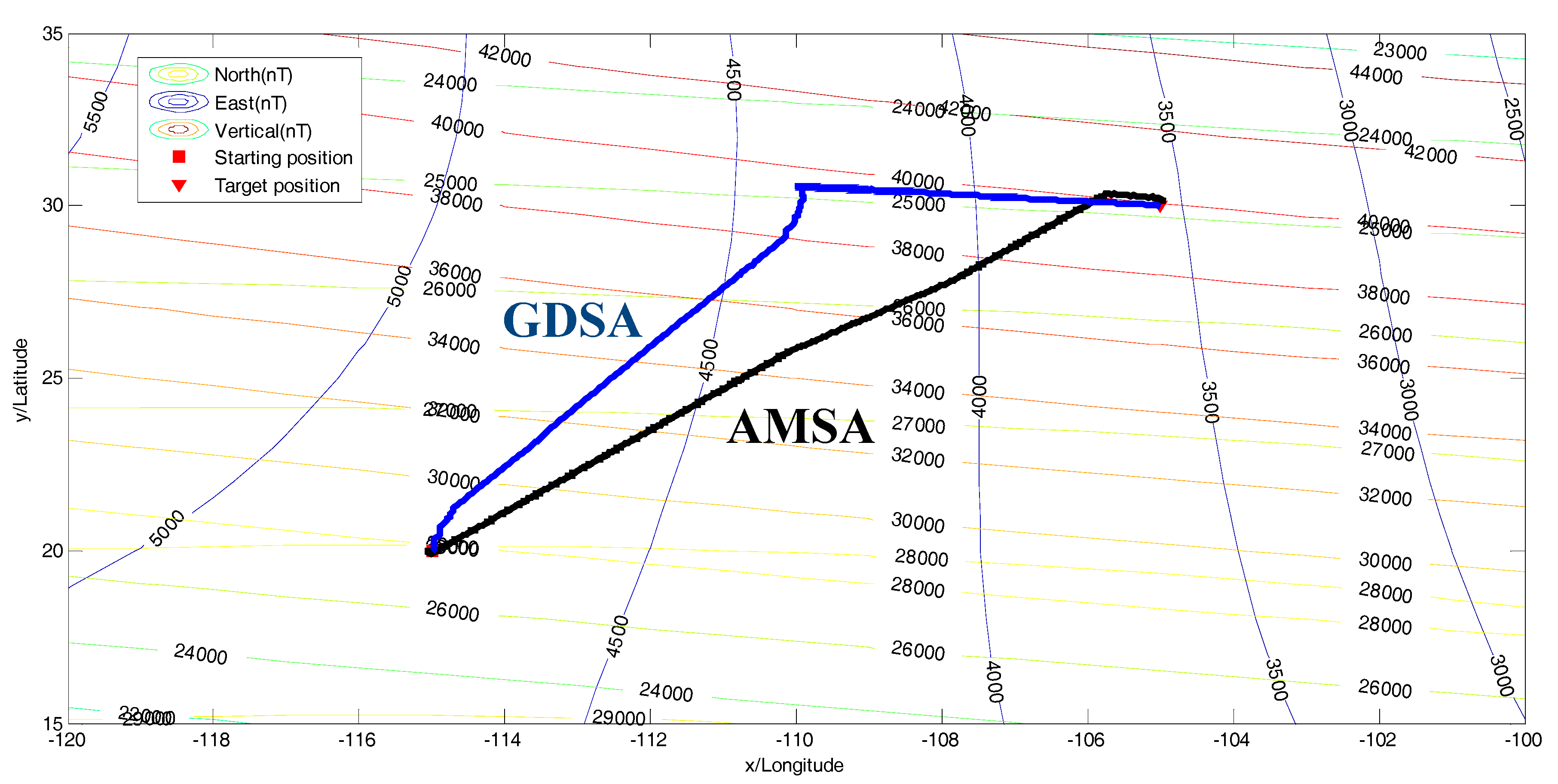
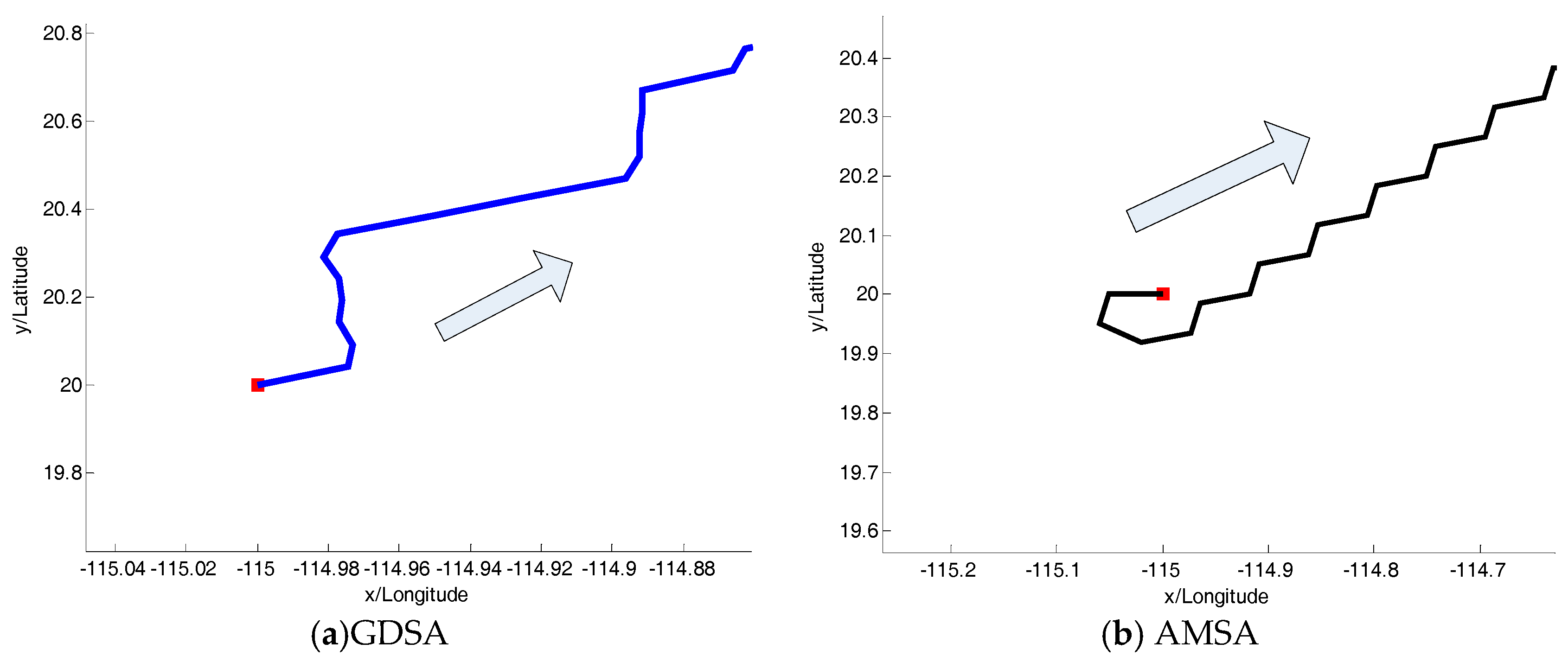
5.3.3. Analysis Paths
5.4. Discussions
6. Conclusions
Acknowledgments
Author Contributions
Conflicts of Interest
References
- Wadhams, P. The use of autonomous underwater vehicles to map the variability of under-ice topography. Ocean Dyn. 2012, 62, 439–447. [Google Scholar] [CrossRef]
- Wynn, R.B.; Huvenne, V.A.I.; Le Bas, T.P.; Murtona, B.J.; Connellya, D.P.; Betta, B.J.; Ruhla, H.A.; Morrisa, K.J.; Peakallb, J.; Parsonsc, D.R.; et al. Autonomous Underwater Vehicles (AUVs): Their past, present and future contributions to the advancement of marine geoscience. Mar. Geol. 2014, 352, 451–468. [Google Scholar] [CrossRef]
- Ding, W.; Wang, J.; Rizos, C. Improving Adaptive Kalman Estimation in GPS/INS Integration. J. Navig. 2007, 60, 517–529. [Google Scholar] [CrossRef]
- Stutters, L.; Liu, H.; Tiltman, C.; Brown, D.J. Navigation technologies for autonomous underwater vehicles. IEEE Trans. Syst. Man Cybern. Part C 2008, 38, 581–589. [Google Scholar] [CrossRef]
- Lohmann, K.J. Animal behaviour: Magnetic-field perception. Nature 2010, 464, 1140–1142. [Google Scholar] [CrossRef] [PubMed]
- Benhamou, S.; Bonadonna, F.; Jouventin, P. Successful homing of magnet-carrying white-chinned petrels released in the open sea. Anim. Behav. 2003, 65, 729–734. [Google Scholar] [CrossRef]
- Wiltschko, R.; Wiltschko, W. Evidence for the use of magnetic outward-journey information in homing pigeons. Sci. Nat. 1978, 65, 112–113. [Google Scholar] [CrossRef]
- Luschi, P.; Benhamou, S.; Girard, C.; Ciccione, S.; Roos, D.; Sudre, J.; Benvenuti, S. Marine turtles use geomagnetic cues during open-sea homing. Curr. Biol. 2007, 17, 126–133. [Google Scholar] [CrossRef] [PubMed]
- Kinsey, J.C.; Eustice, R.M.; Whitcomb, L.L. A survey of underwater vehicle navigation: Recent advances and new challenges. IFAC Conf. Manoeuvering Control Mar. Craft 2006, 88, 20090–20102. [Google Scholar]
- Zhou, L.; Sun, X.; Li, X.; Chen, J. Miniature Microring Resonator Sensor Based on a Hybrid Plasmonic Waveguide. Sensors 2011, 11, 6856–6867. [Google Scholar] [CrossRef] [PubMed]
- Caifa, G.; Anliang, L.; Hong, C.; Yang, H. Algorithm for geomagnetic navigation and its validity evaluation. In Proceedings of the International Conference on Computer Science and Automation Engineering (CSAE), Shanghai, China, 10–12 June 2011; Volume 1, pp. 573–577. [Google Scholar]
- Winklhofer, M. The physics of geomagnetic-field transduction in animals. IEEE Trans. Magn. 2009, 45, 5259–5265. [Google Scholar] [CrossRef]
- Lin, Y.; Yan, L.; Tong, Q. Underwater geomagnetic navigation based on ICP algorithm. In Proceedings of the IEEE International Conference on Robotics and Biomimetics, Sanya, China, 15–18 December 2007; pp. 2115–2120. [Google Scholar]
- Ge, Z.; Zhou, J. A new approach to geomagnetic matching navigation. In Proceedings of the Second International Conference on Spatial Information Technology, Wuhan, China, 10–11 November 2007; pp. 67952–67956. [Google Scholar]
- Paolo, L.; Hays, G.C.; Floriano, P. A review of long-distance movements by marine turtles, and the possible role of ocean currents. Oikos 2003, 103, 293–302. [Google Scholar]
- Dennis, T.E.; Rayner, M.J.; Walker, M.M. Evidence that pigeons orient to geomagnetic intensity during homing. Proc. R. Soc. Lond. B 2007, 274, 1153–1158. [Google Scholar] [CrossRef] [PubMed]
- Liu, M.; Liu, K.; Yang, P.; Lei, X.; Li, H. Bio-inspired navigation based on geomagnetic. In Proceedings of the 2013 IEEE International Conference on Robotics and Biomimetics, Shenzhen, China, 12–14 December 2013; pp. 2339–2344. [Google Scholar]
- Liu, M.; Liu, K.; Peng, X.; Li, H. Bio-inspired navigation based on geomagnetic for the autonomous underwater vehicle. In Proceedings of the IEEE International Conference on OCEANS, Taipei, Taiwan, 7–10 April 2014; pp. 1–5. [Google Scholar]
- Bonadonna, F.; Bajzak, C.; Benhamou, S.; Igloi, K.; Jouventin, P.; Lipp, H.P.; Dell’Omo, G. Orientation in the wandering albatross: Interfering with magnetic perception does not affect orientation performance. Proc. R. Soc. B 2005, 272, 489–495. [Google Scholar] [CrossRef] [PubMed]
- Benhamou, S.; Sudre, J.; Bourjea, J.; Ciccione, S.; De Santis, A.; Luschi, P. The Role of Geomagnetic Cues in Green Turtle Open Sea Navigation. PLoS ONE 2011, 6, e26672. [Google Scholar] [CrossRef] [PubMed]
- Fraenkel, G.S.; Gunn, D.L. The Orientation of Animals. Kineses, Taxes and Compass Reactions. Am. Nat. 1941, 93, 619–620. [Google Scholar]
- Grasso, F.W. Invertebrate-Inspired sensory-motor systems and autonomous, olfactory-guided exploration. Biol. Bull. 2001, 200, 160–168. [Google Scholar] [CrossRef] [PubMed]
- Maus, S.; Macmillan, S.; Mclean, S.; Hamilton, B.; Thomson, A.; Nair, M.; Rollins, C. The US/UK World Magnetic Model for 2010–2015; British Geological Survey: Nottingham, UK, 2012; Available online: http:nora.nerc.ac.uk/18737/ (accessed on 21 December 2017).
- Codling, E.A.; Plank, M.J.; Benhamou, S. Random walk models in biology. J. R. Soc. 2008, 5, 813–834. [Google Scholar] [CrossRef] [PubMed]
- Benhamou, S. How to reliably estimate the tortuosity of an animal’s path: Straightness, sinuosity, or fractal dimension? J. Theor. Biol. 2004, 229, 209–220. [Google Scholar] [CrossRef] [PubMed]













{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| No | Parameters | Size |
|---|---|---|
| 1 | 30° | |
| 2 | 0.1 | |
| 3 | 0.3 | |
| 4 | 0.0001 | |
| 5 | 0.05 | |
| 6 | 500 m | |
| 7 | 10 |
| Algorithm | The Steps of Iteration | The Straightness Index |
|---|---|---|
| GDSA | 438 | 0.6217 |
| AMSA | 343 | 0.7514 |
© 2017 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Li, H.; Liu, M.; Liu, K.; Zhang, F. A Study on the Model of Detecting the Variation of Geomagnetic Intensity Based on an Adapted Motion Strategy. Sensors 2018, 18, 39. https://doi.org/10.3390/s18010039
Li H, Liu M, Liu K, Zhang F. A Study on the Model of Detecting the Variation of Geomagnetic Intensity Based on an Adapted Motion Strategy. Sensors. 2018; 18(1):39. https://doi.org/10.3390/s18010039
Chicago/Turabian StyleLi, Hong, Mingyong Liu, Kun Liu, and Feihu Zhang. 2018. "A Study on the Model of Detecting the Variation of Geomagnetic Intensity Based on an Adapted Motion Strategy" Sensors 18, no. 1: 39. https://doi.org/10.3390/s18010039
APA StyleLi, H., Liu, M., Liu, K., & Zhang, F. (2018). A Study on the Model of Detecting the Variation of Geomagnetic Intensity Based on an Adapted Motion Strategy. Sensors, 18(1), 39. https://doi.org/10.3390/s18010039