Characterization of Distributed Microfabricated Strain Gauges on Stretchable Sensor Networks for Structural Applications

Abstract
:1. Introduction
2. Problem Statement
3. Method of Approach
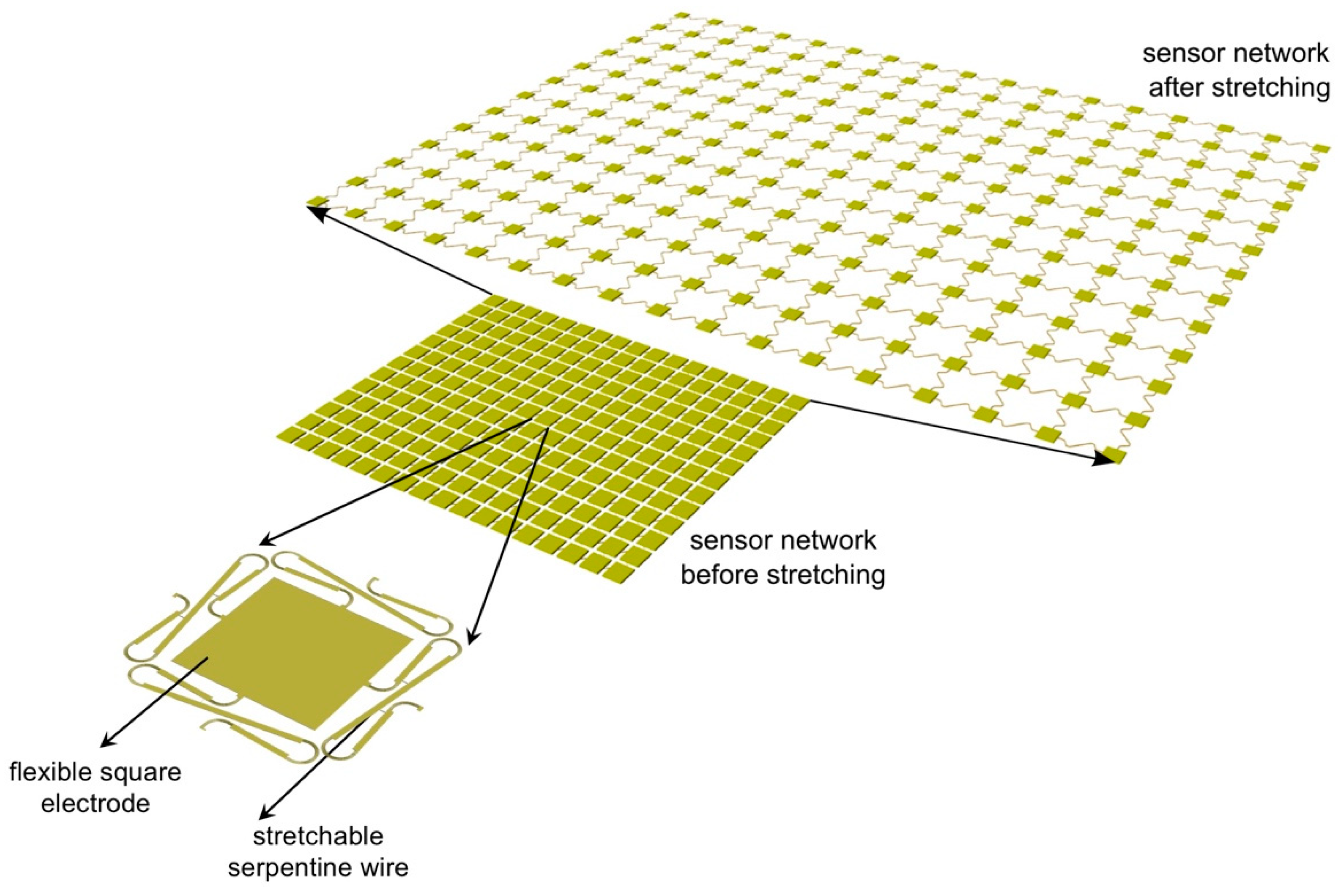
4. Sensor Network
4.1. Design and Simulation
4.2. Sample Preparation
4.2.1. Sensor Network Fabrication
4.2.2. Sensor Network Deployment and Integration
4.3. Testing
4.3.1. Analyses of Yield and Variation
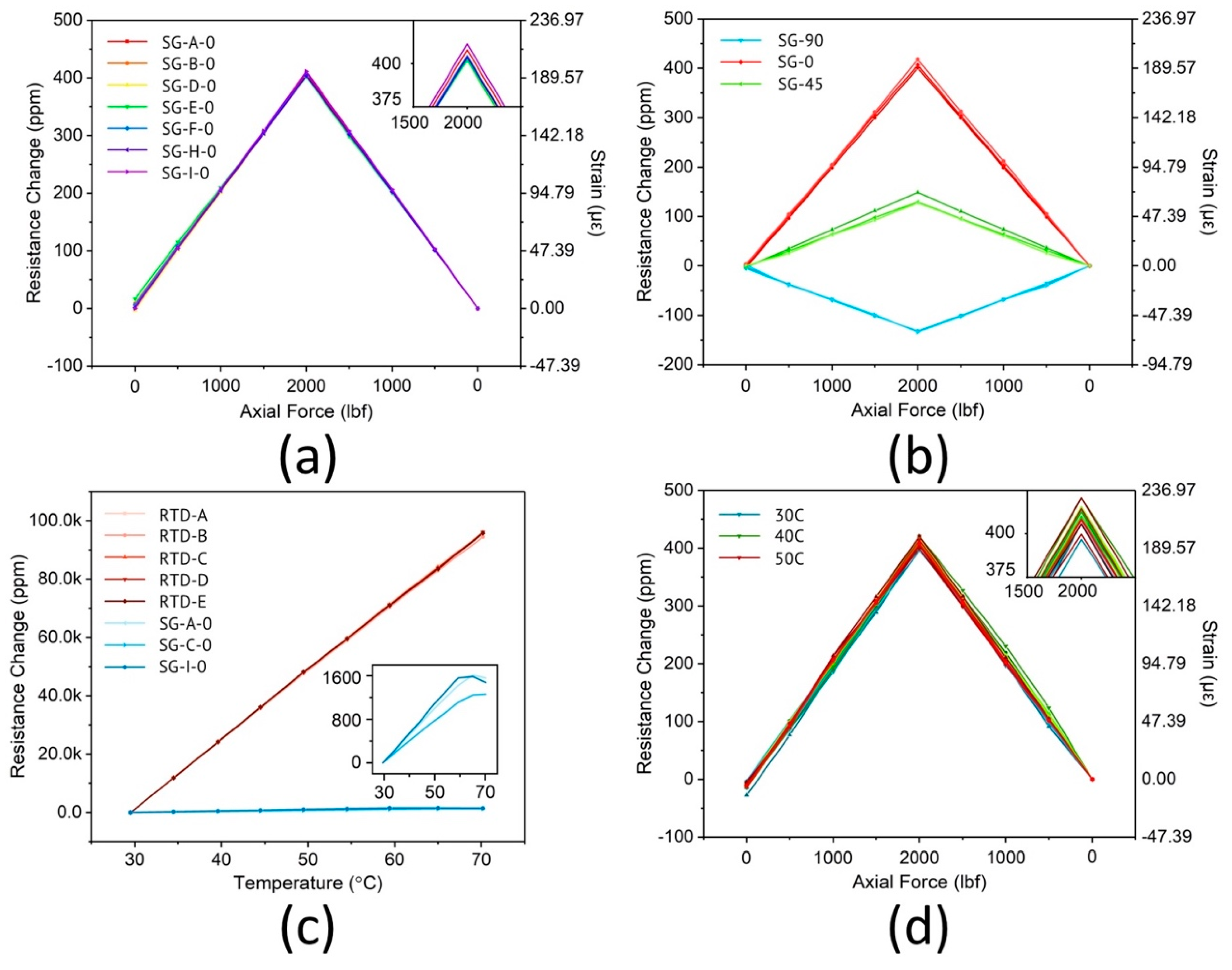
4.3.2. Tensile Test
4.3.3. Temperature Effect
4.3.4. Flexural Test
4.3.5. Fatigue Test
5. Conclusions
Author Contributions
Funding
Acknowledgments
Conflicts of Interest
References
- Chopra, I. Review of State of Art of Smart Structures and Integrated Systems. AIAA J. 2002, 40, 2145–2187. [Google Scholar] [CrossRef]
- Anderson, G.L.; Crowson, A.; Chandra, J. Introduction to Smart Structures. In Intelligent Structural Systems, 1st ed.; Tzou, H.S., Anderson, G.L., Eds.; Springer Science & Business Media: Berlin, Germany, 2013; Volume 13, pp. 1–8. [Google Scholar]
- Balageas, D. Introduction to Structural Health Monitoring. In Structural Health Monitoring, 1st ed.; Balageas, D., Fritzen, C.P., Güemes, A., Eds.; ISTE Ltd.: London, UK; John Wiley & Sons, Inc.: Newport Beach, CA, USA, 2006; Volume 90, pp. 13–43. [Google Scholar]
- Chang, F.K.; Markmiller, J.F.C.; Yang, J.; Kim, Y. Structural Health Monitoring. In System Health Management: With Aerospace Applications, 1st ed.; Johnson, S.B., Gormley, T.J., Kessler, S.S., Mott, C.D., Patterson-Hine, A., Reichard, K.M., Scandura, P.A., Eds.; John Wiley & Sons, Ltd.: Chichester, UK, 2011; pp. 419–428. [Google Scholar] [Green Version]
- Zhang, Y.; Yan, Z.; Nan, K.; Xiao, D.; Liu, Y.; Luan, H.; Fu, H.; Wang, X.; Yang, Q.; Wang, J.; et al. A mechanically driven form of Kirigami as a route to 3D mesostructures in micro/nanomembranes. Proc. Natl. Acad. Sci. USA 2015, 112, 11757–11764. [Google Scholar] [CrossRef] [PubMed] [Green Version]
- Khang, D.Y.; Jiang, H.; Huang, Y.; Rogers, J.A. A Stretchable Form of Single-Crystal Silicon for High-Performance Electronics on Rubber Substrates. Science 2006, 311, 208–212. [Google Scholar] [CrossRef] [PubMed]
- Kim, D.H.; Ahn, J.H.; Choi, W.M.; Kim, H.S.; Kim, T.H.; Song, J.; Huang, Y.Y.; Liu, Z.; Lu, C.; Rogers, J.A. Stretchable and Foldable Silicon Integrated Circuits. Science 2008, 320, 507–511. [Google Scholar] [CrossRef] [PubMed]
- Oh, J.Y.; Rondeau-Gagné, S.; Chiu, Y.C.; Chortos, A.; Lissel, F.; Wang, G.J.N.; Schroeder, B.C.; Kurosawa, T.; Lopez, J.; Katsumata, T.; et al. Intrinsically stretchable and healable semiconducting polymer for organic transistors. Nature 2016, 539, 411–415. [Google Scholar] [CrossRef] [PubMed] [Green Version]
- Boutry, C.M.; Nguyen, A.; Lawal, Q.O.; Chortos, A.; Rondeau-Gagné, S.; Bao, Z. A Sensitive and Biodegradable Pressure Sensor Array for Cardiovascular Monitoring. Adv. Mater. 2015, 27, 6954–6961. [Google Scholar] [CrossRef] [PubMed]
- Wang, S.; Xu, J.; Wang, W.; Wang, G.J.N.; Rastak, R.; Molina-Lopez, F.; Chung, J.W.; Niu, S.; Feig, V.R.; Lopez, J.; et al. Skin electronics from scalable fabrication of an intrinsically stretchable transistor array. Nature 2018, 555, 83–88. [Google Scholar] [CrossRef] [PubMed]
- Takei, K.; Takahashi, T.; Ho, J.C.; Ko, H.; Gillies, A.G.; Leu, P.W.; Fearing, R.S.; Javey, A. Nanowire active-matrix circuitry for low-voltage macroscale artificial skin. Nat. Mater. 2010, 9, 821–826. [Google Scholar] [CrossRef] [PubMed]
- Wang, C.; Hwang, D.; Yu, Z.; Takei, K.; Park, J.; Chen, T.; Ma, B.; Javey, A. User-interactive electronic skin for instantaneous pressure visualization. Nat. Mater. 2013, 12, 899–904. [Google Scholar] [CrossRef] [PubMed] [Green Version]
- Ostfeld, A.E.; Gaikwad, A.M.; Khan, Y.; Arias, A.C. High-performance flexible energy storage and harvesting system for wearable electronics. Sci. Rep. 2016, 6, 26122. [Google Scholar] [CrossRef] [PubMed] [Green Version]
- Khan, Y.; Pavinatto, F.J.; Lin, M.C.; Liao, A.; Swisher, S.L.; Mann, K.; Subramanian, V.; Maharbiz, M.M.; Arias, A.C. Inkjet-Printed Flexible Gold Electrode Arrays for Bioelectronic Interfaces. Adv. Funct. Mater. 2016, 26, 1004–1013. [Google Scholar] [CrossRef]
- Lanzara, G.; Salowitz, N.; Guo, Z.; Chang, F.K. A Spider-Web-Like Highly Expandable Sensor Network for Multifunctional Materials. Adv. Mater. 2010, 22, 4643–4648. [Google Scholar] [CrossRef] [PubMed]
- Salowitz, N.; Guo, Z.; Kim, S.J.; Li, Y.H.; Lanzara, G.; Chang, F.K. Screen Printed Piezoceramic Actuators/Sensors Microfabricated on Organic Films and Stretchable Networks. In Proceedings of the 9th International Workshop on Structural Health Monitoring, Stanford, CA, USA, 10–12 September 2013; pp. 1543–1550, ISBN 978-1-60595-115-7. [Google Scholar]
- Salowitz, N.P.; Guo, Z.; Kim, S.J.; Li, Y.H.; Lanzara, G.; Chang, F.K. Microfabricated Expandable Sensor Networks for Intelligent Sensing Materials. IEEE Sens. J. 2014, 14, 2138–2144. [Google Scholar] [CrossRef]
- Guo, Z. Robust Design and Fabrication of Highly Stretchable Sensor Networks for the Creation of Intelligent Materials. Ph.D. Thesis, Stanford University, Stanford, CA, USA, May 2014. [Google Scholar]
- Guo, Z.; Kim, K.; Salowitz, N.; Lanzara, G.; Wang, Y.; Peumans, P.; Chang, F.K. Functionalization of stretchable networks with sensors and switches for composite materials. Struct. Health Monit. 2017, 17, 598–623. [Google Scholar] [CrossRef]
- Chen, X.; Topac, T.; Smith, W.; Ladpli, P.; Cao, H.; Chang, F.K. Development of a Multifunctional Stretchable Sensor Network for Smart Structures. In Proceedings of the 11th International Workshop on Structural Health Monitoring, Stanford, CA, USA, 12–14 September 2017; pp. 712–720, ISBN 978-1-60595-330-4. [Google Scholar]
- Kopsaftopoulos, F.; Nardari, R.; Li, Y.H.; Chang, F.K. A Stochastic Global Identification Framework for Aerospace Structures Operating Under Varying Flight States. Mech. Syst. Signal Process. 2018, 98, 425–447. [Google Scholar] [CrossRef]
- Hua, Q.; Sun, J.; Liu, H.; Bao, R.; Yu, R.; Zhai, J.; Pan, C.; Wang, Z.L. Skin-inspired highly stretchable and conformable matrix networks for multifunctional sensing. Nat. Commun. 2018, 9, 244. [Google Scholar] [CrossRef] [PubMed] [Green Version]
- Pinet, É.; Hamel, C.; Glišić, B.; Inaudi, D.; Miron, N. Health monitoring with optical fiber sensors: From human body to civil structures. In Health Monitoring of Structural and Biological Systems 2007; International Society for Optics and Photonics: Bellingham, WA, USA, 2007; Volume 6532, pp. 653219–653230. [Google Scholar]
- Bao, X.; Chen, L. Recent Progress in Distributed Fiber Optic Sensors. Sensors 2012, 12, 8601–8639. [Google Scholar] [CrossRef] [PubMed] [Green Version]
- Giurgiutiu, V. Tuned Lamb Wave Excitation and Detection with Piezoelectric Wafer Active Sensors for Structural Health Monitoring. J. Intell. Material Syst. Struct. 2005, 16, 291–305. [Google Scholar] [CrossRef] [Green Version]
- Giridhara, G.; Rathod, V.T.; Naik, S.; Mahapatra, D.R.; Gopalakrishnan, S. Rapid localization of damage using a circular sensor array and Lamb wave based triangulation. Mech. Syst. Signal Process. 2010, 24, 2929–2946. [Google Scholar] [CrossRef]
- Wang, Y.; Wang, A.X.; Wang, Y.; Chyu, M.K.; Wang, Q.M. Fabrication and characterization of carbon nanotube–polyimide composite based high temperature flexible thin film piezoresistive strain sensor. Sens. Actuator A Phys. 2013, 199, 265–271. [Google Scholar] [CrossRef]
- Amjadi, M.; Pichitpajongkit, A.; Lee, S.; Ryu, S.; Park, I. Highly Stretchable and Sensitive Strain Sensor Based on Silver Nanowire–Elastomer Nanocomposite. ACS Nano 2014, 8, 5154–5163. [Google Scholar] [CrossRef] [PubMed]
- Yan, C.; Wang, J.; Kang, W.; Cui, M.; Wang, X.; Foo, C.Y.; Chee, K.J.; Lee, P.S. Highly Stretchable Piezoresistive Graphene–Nanocellulose Nanopaper for Strain Sensors. Adv. Mater. 2014, 26, 2022–2027. [Google Scholar] [CrossRef] [PubMed]
- Mohammed, A.A.; Moussa, W.A.; Lou, E. High-Performance Piezoresistive MEMS Strain Sensor with Low Thermal Sensitivity. Sensors 2011, 11, 1819–1846. [Google Scholar] [CrossRef] [PubMed] [Green Version]
- Zymelka, D.; Yamashita, T.; Takamatsu, S.; Itoh, T.; Kobayashi, T. Printed strain sensor with temperature compensation and its evaluation with an example of applications in structural health monitoring. Jpn. J. Appl. Phys. 2017, 56, 05EC02. [Google Scholar] [CrossRef]
- Sundararaman, V.; Rathod, V.T.; Mahapatra, D.R. Temperature compensation in CNT-composite distributed strain sensors. In Smart Sensor Phenomena, Technology, Networks, and Systems Integration 2015; International Society for Optics and Photonics: Bellingham, WA, USA, 2015; Volume 9436, p. 94360M. [Google Scholar]
- Vishay Micro-Measurements. Strain Gage Selection: Criteria, Procedures, Recommendations—Tech Note TN-505-6. Available online: http://www.vishaypg.com/docs/11055/tn505.pdf (accessed on 29 August 2017).
- Kazimi, S.M.A. Analysis of Strain. In Solid Mechanics, 1st ed.; Tata McGraw-Hill Publishing Company Limited: New Delhi, India, 2006; pp. 75–94. ISBN 0-07-451715-5. [Google Scholar]
- Zhu, J.; Ren, L.; Ho, S.C.; Jia, Z.; Song, G. Gas pipeline leakage detection based on PZT sensors. Smart Mater. Struct. 2017, 26, 025022. [Google Scholar] [CrossRef]
- Holman, J.P. Analysis of Experimental Data. In Experimental Methods for Engineers, 8th ed.; McGraw-Hill: New York City, NY, USA, 2011; Volume 7, pp. 60–70, ISBN-13 978-0073529301. [Google Scholar]
- Tang, H.; Li, M.; Roukes, M.L. California Institute of Technology. Metallic Thin Film Piezoresistive Transduction in Micromechanical and Nanomechanical Devices and Its Application in Self-Sensing SPM Probes. U.S. Patent No. 7,617,736, 17 November 2009. [Google Scholar]
- Sandwell, D.T. Biharmonic spline interpolation of GEOS-3 and SEASAT altimeter data. Geophys. Res. Lett. 1987, 14, 139–142. [Google Scholar] [CrossRef] [Green Version]
- Du, W.Y. Resistive Sensors. In Resistive, Capacitive, Inductive, and Magnetic Sensor Technologies, 1st ed.; CRC Press: Boca Raton, FL, USA, 2015; pp. 25–66. ISBN 978-1-4398-1244-0. [Google Scholar]









{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Length | Width | Thickness | Number of Strips | Theoretical Resistance | Actual Resistance | |
|---|---|---|---|---|---|---|
| SG | 500 µm | 4 µm | 100 nm | 18 | 11.025 kΩ | 11.831 kΩ |
| Uncertainty | Value | Rationale |
|---|---|---|
| ± 2 µm | photolithographical alignment accuracy | |
| ± 2 µm | ||
| ± 4 nm | metal deposition empirical data |
© 2018 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Chen, X.; Topac, T.; Smith, W.; Ladpli, P.; Liu, C.; Chang, F.-K. Characterization of Distributed Microfabricated Strain Gauges on Stretchable Sensor Networks for Structural Applications. Sensors 2018, 18, 3260. https://doi.org/10.3390/s18103260
Chen X, Topac T, Smith W, Ladpli P, Liu C, Chang F-K. Characterization of Distributed Microfabricated Strain Gauges on Stretchable Sensor Networks for Structural Applications. Sensors. 2018; 18(10):3260. https://doi.org/10.3390/s18103260
Chicago/Turabian StyleChen, Xiyuan, Tanay Topac, Wyatt Smith, Purim Ladpli, Cheng Liu, and Fu-Kuo Chang. 2018. "Characterization of Distributed Microfabricated Strain Gauges on Stretchable Sensor Networks for Structural Applications" Sensors 18, no. 10: 3260. https://doi.org/10.3390/s18103260