Design and Verification of Heading and Velocity Coupled Nonlinear Controller for Unmanned Surface Vehicle


Abstract
:1. Introduction
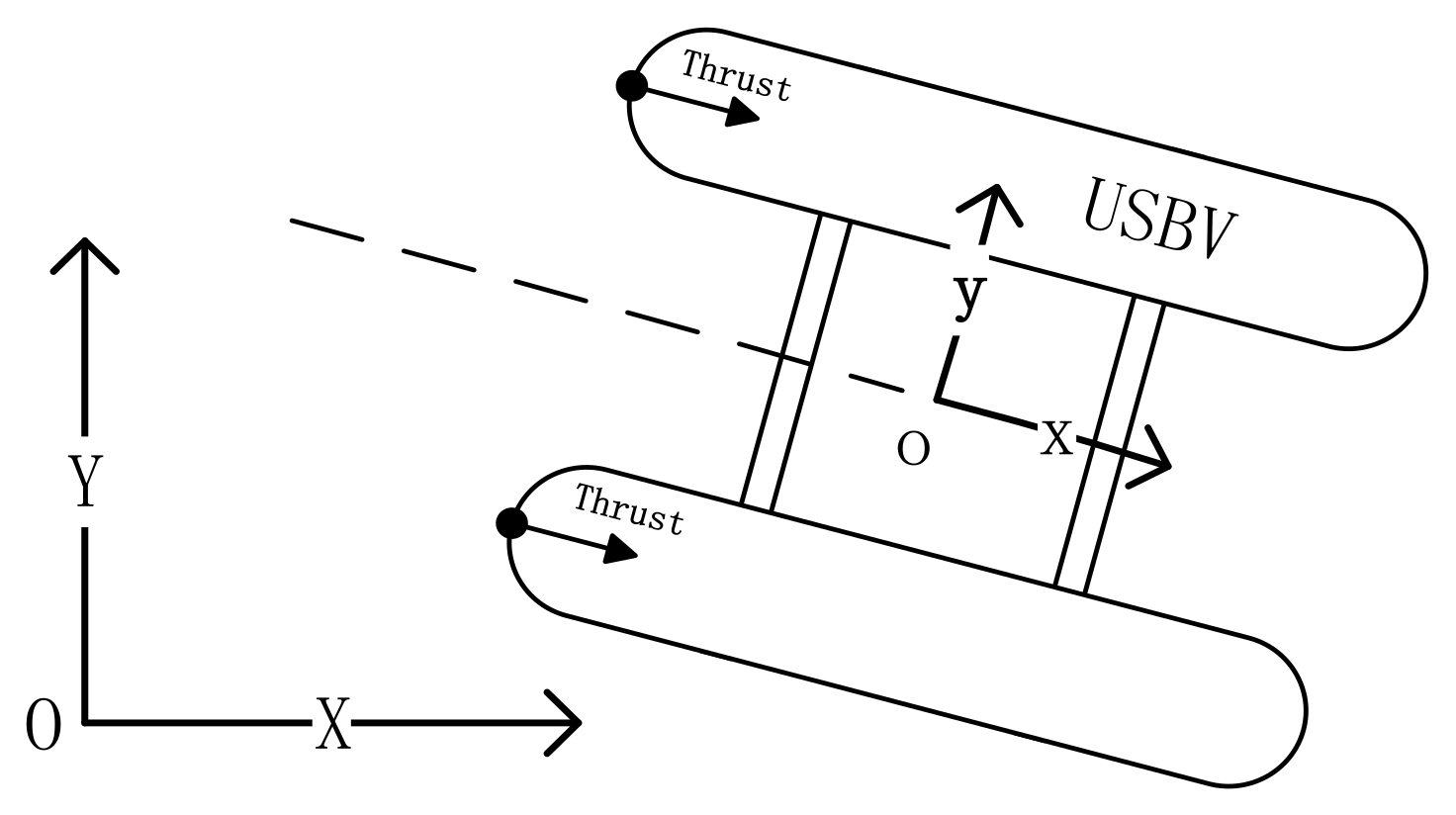
2. The Model of the USBV
2.1. Three Degrees-of-Freedom Equations
2.2. Identification for Drag Coefficients
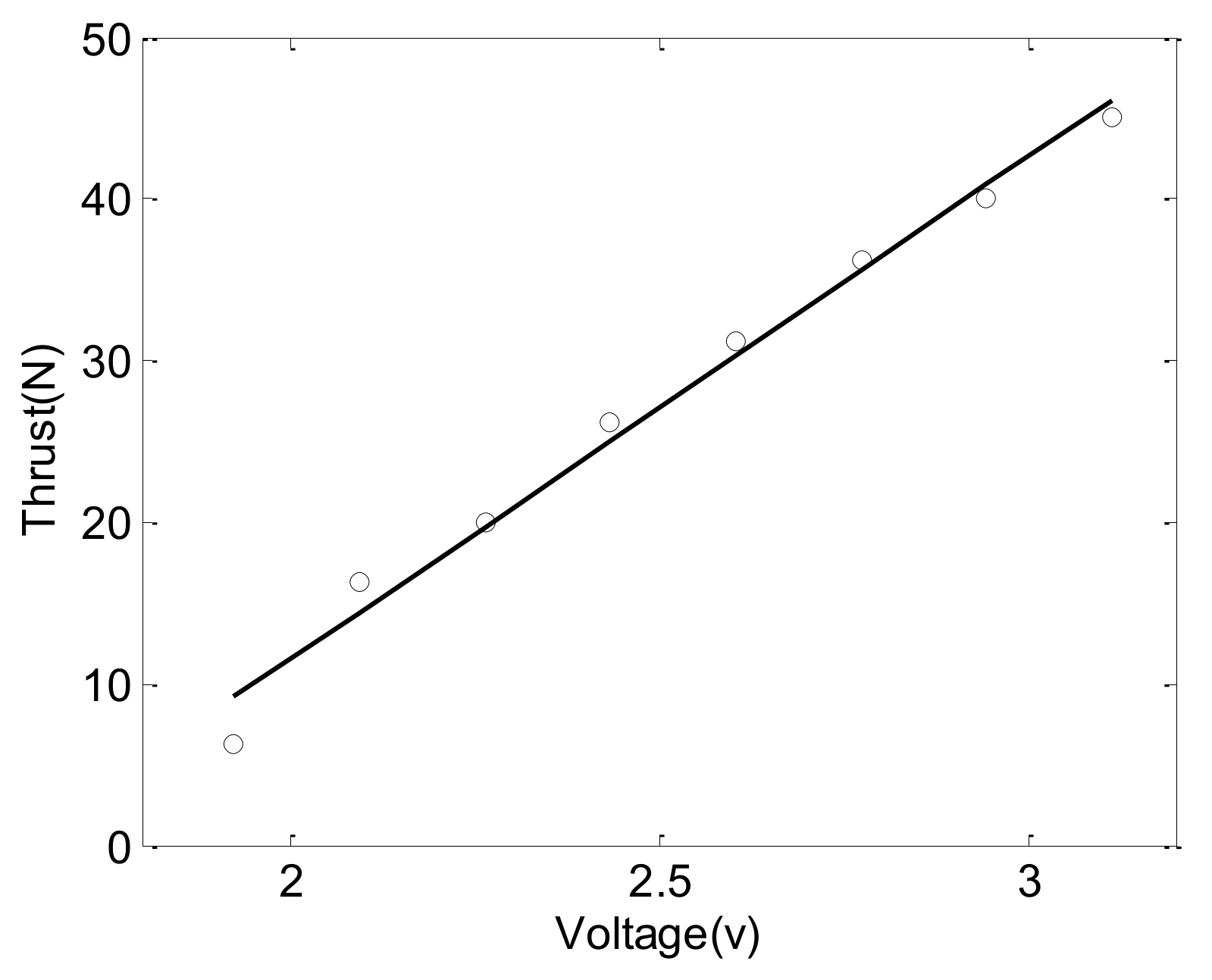
2.3. Thrust and Moment
3. Heading and Velocity Coupled Nonlinear Controller Design
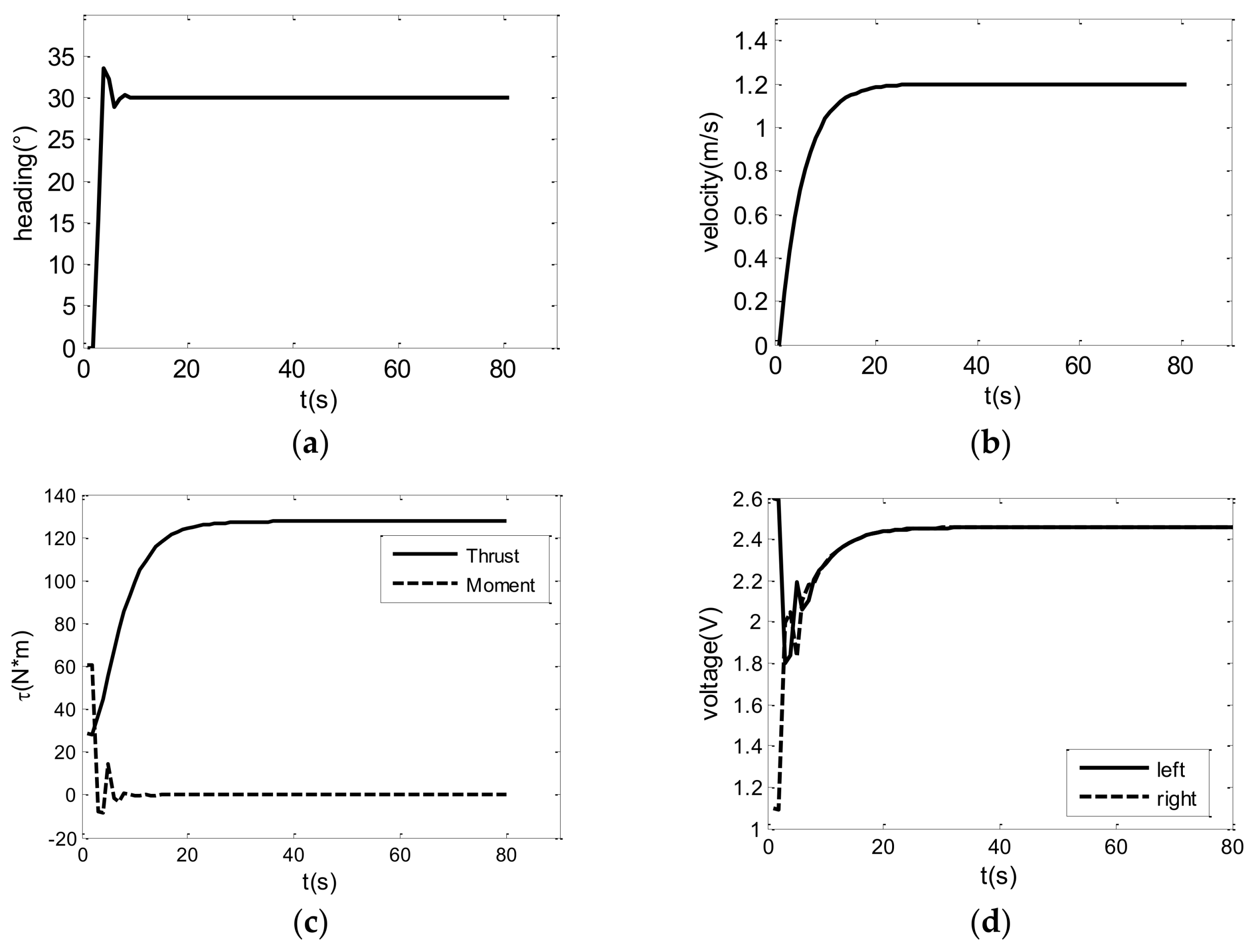
4. Simulation Results
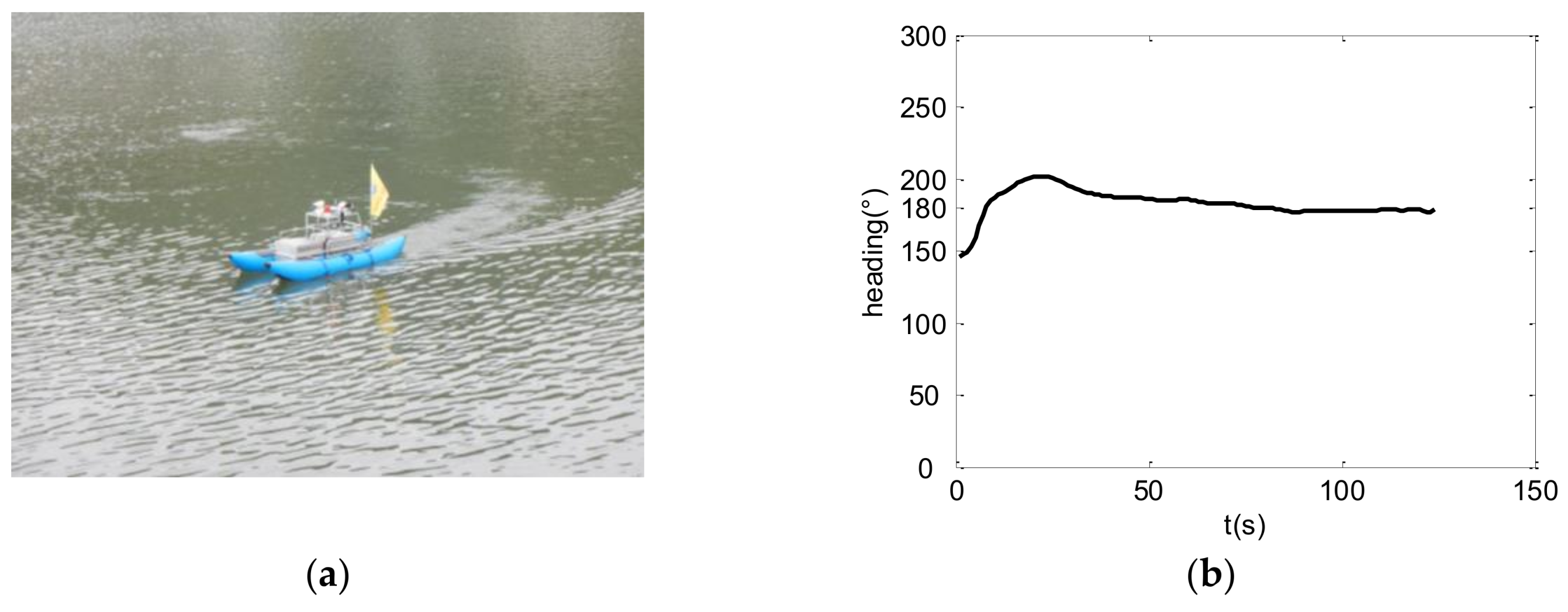
5. Experiment Results
5.1. The USBV
5.2. Experiment Results and Analysis
5.2.1. Lake Experiment
5.2.2. Sea Experiment
6. Conclusions
Author Contributions
Funding
Conflicts of Interest
References
- Mu, D.D.; Wang, G.F.; Fan, Y.S.; Sun, X.J.; Qiu, B.B. Modeling and Identification for Vector Propulsion of an Unmanned Surface Vehicle: Three Degrees of Freedom Model and Response Model. Sensors 2018, 18, 1889. [Google Scholar] [CrossRef] [PubMed]
- Nad, D.; Miskovic, N.; Mandic, F. Navigation, guidance and control of an overactuated marine surface vehicle. Annu. Rev. Control 2015, 40, 172–181. [Google Scholar] [CrossRef]
- Manley, J.E. Unmanned surface vehicles, 15 years of development. In Proceedings of the MTS/IEEE OCEANS, Quebec City, QC, Canada, 15–18 September 2008. [Google Scholar]
- Brown, H.; Jenkins, L.; Meadows, G.; Shuchman, R.A. BathyBoat: An Autonomous Surface Vessel for stand-alone survey and underwater vehicle network supervision. Mar. Technol. Soc. J. 2010, 44, 20–29. [Google Scholar] [CrossRef]
- Naeem, W.; Xu, T.; Sutton, R.; Tiano, A. The design of a navigation, guidance, and control system for an unmanned surface vehicle for environmental monitoring. J. Eng. Marit. Environ. 2008, 222, 67–79. [Google Scholar] [CrossRef] [Green Version]
- Bingham, B.; Kraus, N.; Howe, B.; Freitag, L.; Ball, K.; Koski, P.; Gallimore, E. Passive and Active Acoustics Using an Autonomous Wave Glider. J. Field Robot. 2012, 29, 911–923. [Google Scholar] [CrossRef]
- Matos, A.; Silva, E.; Cruz, N.; Alves, J.C. Development of an Unmanned Capsule for large-scale maritime search and rescue. In Proceedings of the MTS/IEEE OCEANS, San Diego, CA, USA, 23–27 September 2013. [Google Scholar]
- Mou, X.Z.; Wang, H. Wide-baseline stereo-based obstacle mapping for unmanned surface vehicles. Sensors 2018, 18, 1085. [Google Scholar] [CrossRef] [PubMed]
- Sinisterra, A.J.; Dhanak, M.R.; Ellenrieder, K.V. Stereovision-based target tracking system for USV operations. Ocean Eng. 2017, 133, 197–214. [Google Scholar] [CrossRef]
- Fossen, T.I. Handbook of Marine Craft Hydrodynamics and Motion Control, 1st ed.; Wiley: Hoboken, NJ, USA, 2011. [Google Scholar]
- Xia, G.Q.; Shao, X.C.; Zhao, A. Robust Nonlinear Observer and Observer-Backstepping Control Design for Surface Ships. Asian J. Control 2015, 17, 1377–1393. [Google Scholar] [CrossRef]
- Zhang, X.G.; Zou, Z.J. Identification of Abkowitz model for ship maneuvering motion using epsilon-support vector regression. J. Hydrodyn. Ser. B 2011, 23, 353–360. [Google Scholar] [CrossRef]
- Sadat-Hosseini, H.; Carrica, M.P.; Stern, F.; Umeda, N.; Hashimoto, H.; Yamamura, S.; Mastuda, A. CFD, system-based and EFD study of ship dynamic instability events: surf-riding, periodic motion, and broaching. J. Ocean Eng. 2011, 38, 88–110. [Google Scholar] [CrossRef]
- Fossen, T.I.; Breivik, M.; Skjetne, R. Line-of-Sight Path Following of Underactuated Marine Craft. In Proceedings of the IFAC MCMC ’03, Girona, Spain, 7–19 September 2003. [Google Scholar]
- Li, Z.; Sun, J.; Oh, S. Design, analysis and experimental validation of a robust nonlinear path following controller for marine surface vessels. Automatica 2009, 45, 1649–1658. [Google Scholar] [CrossRef]
- Fossen, T.I.; Pettersen, K.Y.; Galeazzi, R. Line-of-Sight Path Following for Dubins Paths with Adaptive Sideslip Compensation of Drift Forces. IEEE Trans. Control Syst. Technol. 2015, 23, 820–827. [Google Scholar] [CrossRef]
- Jiang, Z.P. Global tracking control of underactuated ships by Lyapunov’s direct method. Automatica 2002, 38, 301–309. [Google Scholar] [CrossRef]
- Fossen, T.I.; Lekkas, A. Direct and indirect adaptive integral line-of-sight path-following controllers for marine craft exposed to ocean currents. Int. J. Adapt. Control Signal Process. 2017, 31, 445–463. [Google Scholar] [CrossRef]
- Bibuli, M.; Bruzzone, G.; Mišković, N.; Vukić, Z. Self-oscillation based identification and heading control for Unmanned Surface Vehicles. In Proceedings of the 17th International Workshop on Robotics, Ancona, Italy, 15–17 September 2008. [Google Scholar]
- Gomes, P.; Silvestre, C.; Pascoal, A.; Cunha, R. A path-following controller for the delfimx autonomous surface craft. In Proceedings of the 7th IFAC Conference on Manoeuvring and Control of Marine Craft, Lisbon, Portugal, 20–22 September 2006. [Google Scholar]
- Naeem, W.; Sutton, R.; Chudley, J. Soft computing design of a linear quadratic Gaussian controller for an unmanned surface vehicle. In Proceedings of the 14th IEEE Mediterranean Conference on Control and Automation, Ancona, Italy, 28–30 June 2006. [Google Scholar]
- Sonnenburg, C.R.; Woolsey, C.A. Modeling, Identification, and Control of an Unmanned Surface Vehicle. J. Field Robot. 2013, 30, 371–398. [Google Scholar] [CrossRef] [Green Version]
- Lv, C.X.; Yu, H.S.; Hua, Z.L.; Li, L.; Chi, J.R. Speed and heading control of an unmanned surface vehicle based on state error principle. Math. Probl. Eng. 2018. [Google Scholar] [CrossRef]
- Wang, Y.L.; Han, Q.L. Network-based heading control and rudder oscillation reduction for unmanned surface vehicles. IEEE Trans. Control Syst. Technol. 2017, 25, 1609–1620. [Google Scholar] [CrossRef]
- Larrazabal, J.M.; Peñas, M.S. Intelligent rudder control of an unmanned surface vessel. Expert Syst. Appl. 2016, 55, 106–117. [Google Scholar] [CrossRef]
- Lapierre, L.; Soetanto, D.; Pascoal, A. Nonlinear path following with applications to the control of autonomous underwater vehicles. In Proceedings of the 42nd IEEE conference on decision and control, Maui, HI, USA, 9–12 December 2003. [Google Scholar]
- Li, J.H.; Lee, P.M.; Jun, B.H.; Lim, Y.K. Point-to-point navigation of underactuated ships. Automatica 2008, 44, 3201–3205. [Google Scholar] [CrossRef]
- Jin, J.C.; Zhang, J.; Shao, F.; Lv, Z.C.; Wang, D. A novel ocean bathymetry technologybased on Unmanned Surface Vehicle. Acta Oceanol. Sin. 2018, 37, 99–106. [Google Scholar] [CrossRef]




{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Coefficients | Values |
|---|---|
| d11/(kg/m) | 88.6 |
| d22/(kg/m) | 181.6 |
| d33/(kg·m/rad2) | 687.4 |
| m/kg | 100.0 |
| /kg | −20.0 |
| /kg | −21.6 |
| /(kg·m/rad) | −206.2 |
| I/(kg/m) | 20.0 |
© 2018 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Jin, J.; Zhang, J.; Liu, D. Design and Verification of Heading and Velocity Coupled Nonlinear Controller for Unmanned Surface Vehicle. Sensors 2018, 18, 3427. https://doi.org/10.3390/s18103427
Jin J, Zhang J, Liu D. Design and Verification of Heading and Velocity Coupled Nonlinear Controller for Unmanned Surface Vehicle. Sensors. 2018; 18(10):3427. https://doi.org/10.3390/s18103427
Chicago/Turabian StyleJin, Jiucai, Jie Zhang, and Deqing Liu. 2018. "Design and Verification of Heading and Velocity Coupled Nonlinear Controller for Unmanned Surface Vehicle" Sensors 18, no. 10: 3427. https://doi.org/10.3390/s18103427