An Operational Tool for the Automatic Detection and Removal of Border Noise in Sentinel-1 GRD Products


Abstract
:1. Introduction
- (i)
- The new methods for noise border removal have only focused on IW products. This means that for EW, and especially for SM products that have not been concerned by the IPF upgrade to version 2.90, no solutions are currently available;
- (ii)
- The existing results are limited to high resolution images, as this is the typical format of IW products. Further tests are therefore required for medium resolution images;
- (iii)
- No detailed quantitative performance assessment has ever been carried out to understand the actual impact of border noise on Sentinel-1 image quality.
2. Methodology
- -
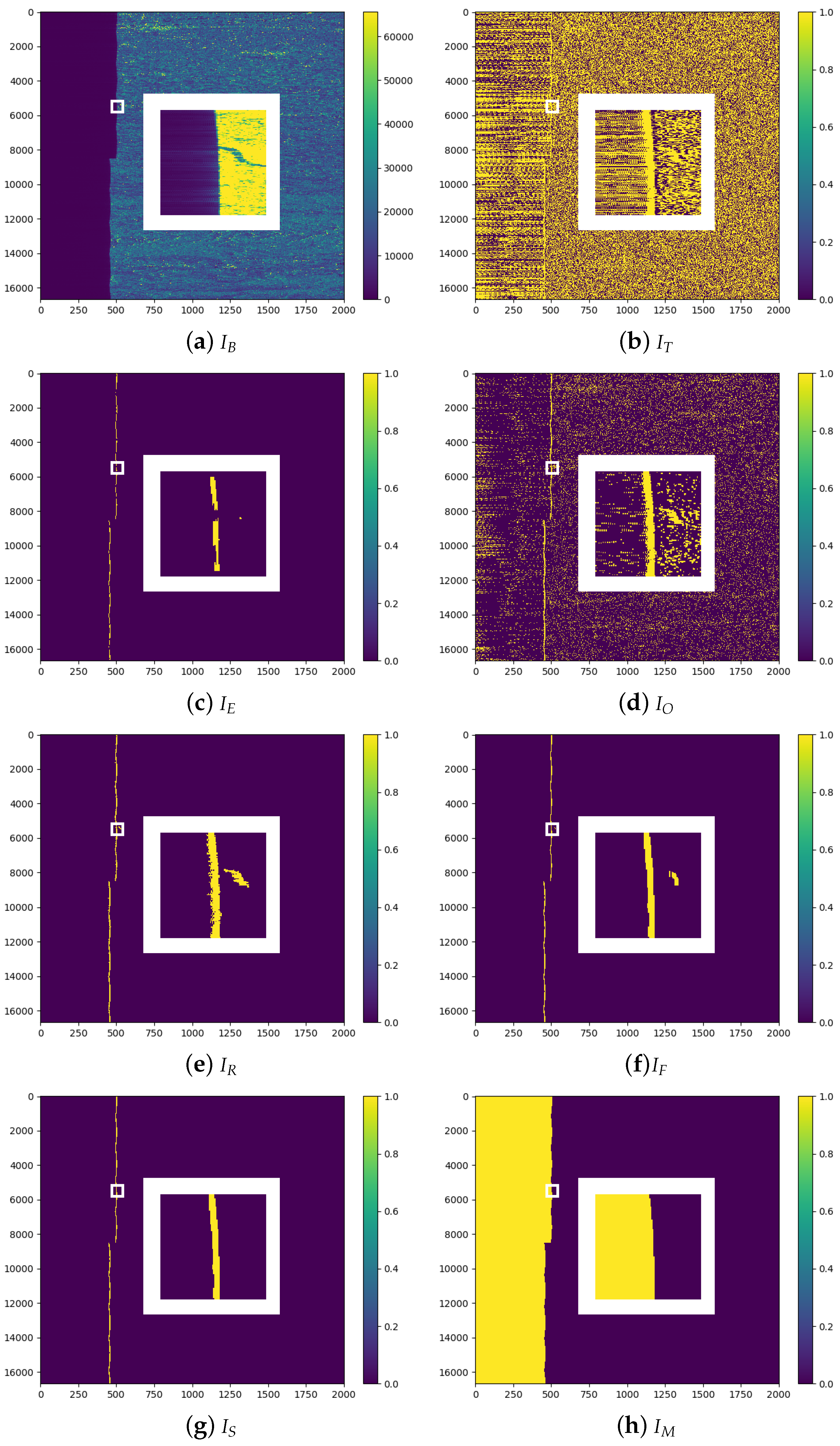
- First, the input image is clipped to create a subset containing the border noise edge, as shown in Figure 3a. This reduces the amount of data to process and the presence of interfaces that are not related to the border noise. According to [4], a safe value for taking into account all the possible noise pixels generated at the border is 2000 samples; therefore, we use this value to define the image width, W. In the proposed example, the image has been clipped around the left edge. The same procedure has to be replicated for all of the other possible edges (right, top and bottom).
- -
- Due to the local nature of border noise, the image is then binarized through adaptive thresholding [14], which does not compute a global threshold for the whole image, but locally calculates a threshold in regions of small size around each pixel. As the transition from noise to data is relatively sharp, the dimension of the local window is kept small and set to 21 × 21 px (∼0.01 W). The obtained binary image is depicted in Figure 3b; all the pixels with values below the local threshold have been set to zero (blue), the others to one (yellow). As can be seen, the output is quite noisy (many local discontinuities are found), but the main border noise/data interface (BDI) is visible. Although it is vertically elongated, the BDI outline is not perfectly linear, but it is characterized by a convex shape (mixed with horizontal shifts) that makes difficult to correctly extract it. To address the problem, we designed a set of filters based on mathematical morphology. More specifically, the main operator is the reconstruction by dilation, which requires us to first define a marker image and recursively dilate it until the contour of a mask image is reached (see Equation (A6)).
- -
- To create the marker, we apply an erosion (see Equation (A1)) to . To suitably fit the shape of the BDI, we use, as a structuring element (SE), a long vertical line of length = 100 px. This means that all the pixel clusters in that do not match this shape are discarded. The result of the erosion is the binary image , shown in Figure 3c. As can be seen, almost all of the spurious local interfaces have been removed and the pixels belonging to the BDI are mainly left. However, part of the BDI has also been eroded and therefore, it cannot be directly used without defining a mask.
- -
- In the reconstruction process, the mask image is used to delimit the maximum extent that the pixel clusters selected within the marker image can reach. In order to better delineate the outline of BDI, this time, we apply to an opening (see Equation (A3)) by a shorter SE, namely, a vertical line of length , which allows the image to be filtered while retaining more detail. The obtained binary image is depicted in Figure 3d.
- -
- Once the marker and mask images have been generated, it is possible to use as a seed to reconstruct by dilation. In this way, a new image is created, in which all the pixel clusters shorter (in the vertical direction) than 100 px have been removed and a better defined BDI outline is obtained. The result is depicted in Figure 3e.
- -
- To further refine the BDI outline and remove the undesired horizontal lines and vertical gaps left from the previous steps, two more filters are applied: an opening followed by a closing (see Equation (A4)). The chosen SE is again a vertical line of length 100 px. Figure 3f shows the obtained binary image .
- -
- In order to cope with the outliers, an additional step is performed that removes the pixel clusters that are too small (area < 1000 px) or too far (more than 3 standard deviations) from the average BDI coordinate along the x-axis, generating the binary image . In the example proposed in Figure 3g, a small cluster of pixels is found and discarded.
- -
- Lastly, all the pixels comprised between the actual image border and the BDI are selected to create the final border noise mask , shown in yellow in Figure 3h.
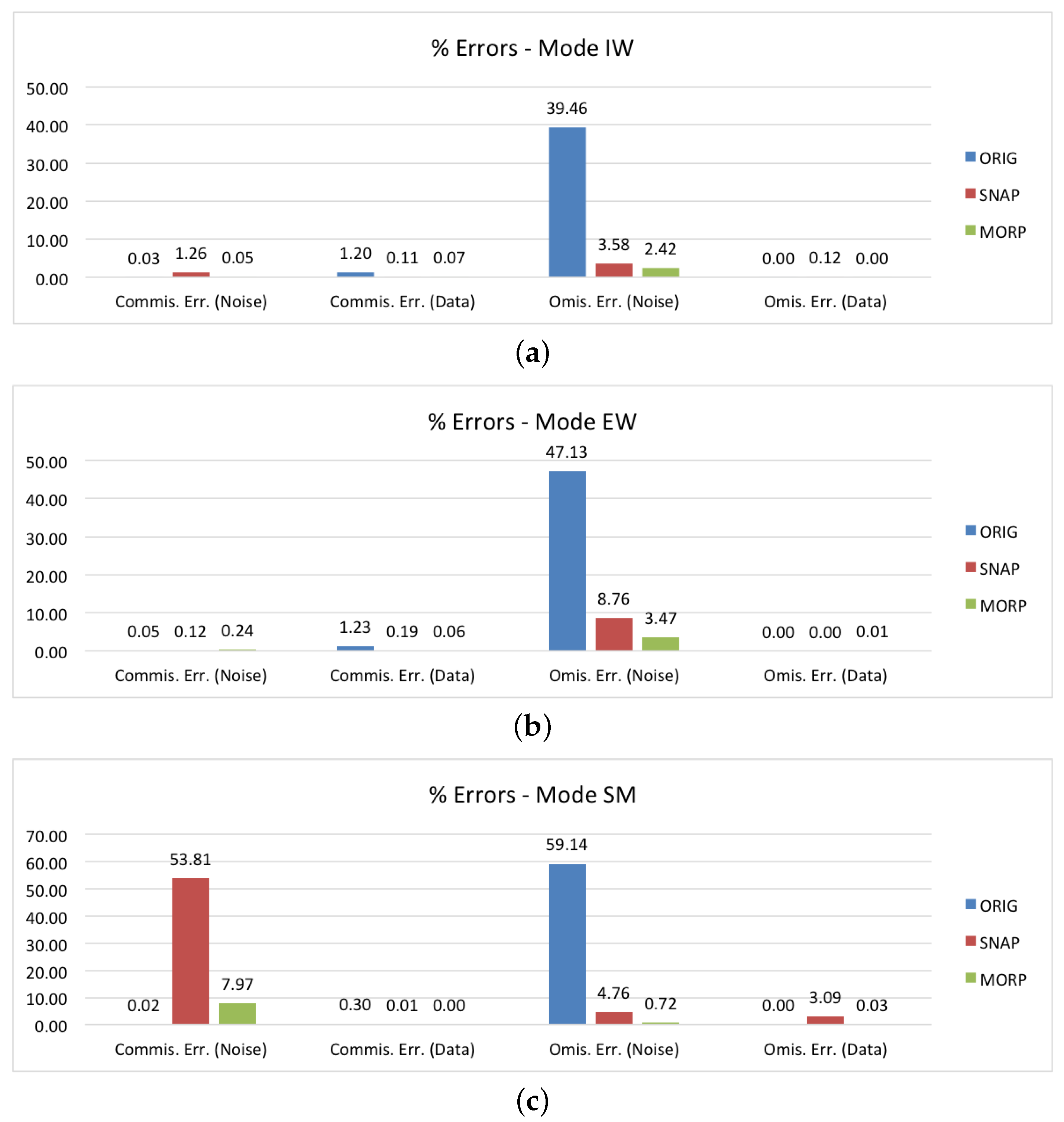
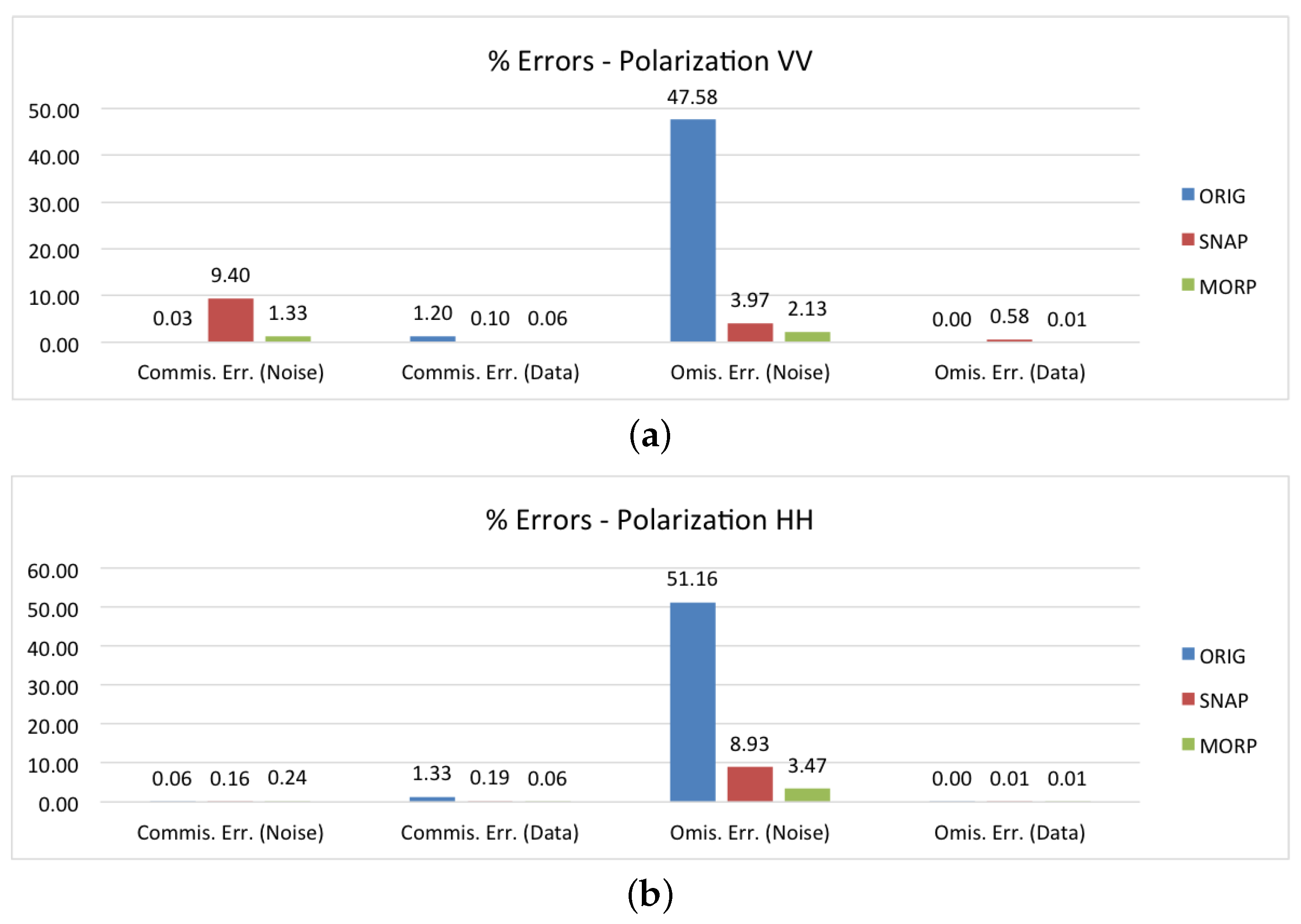
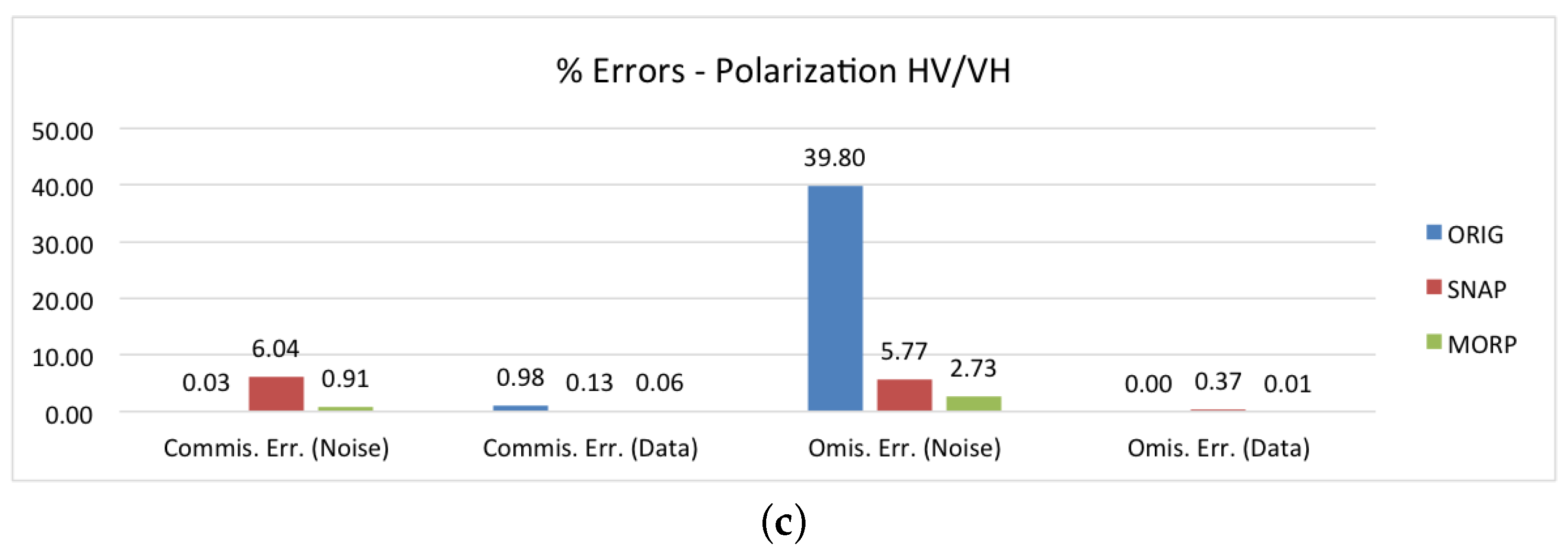
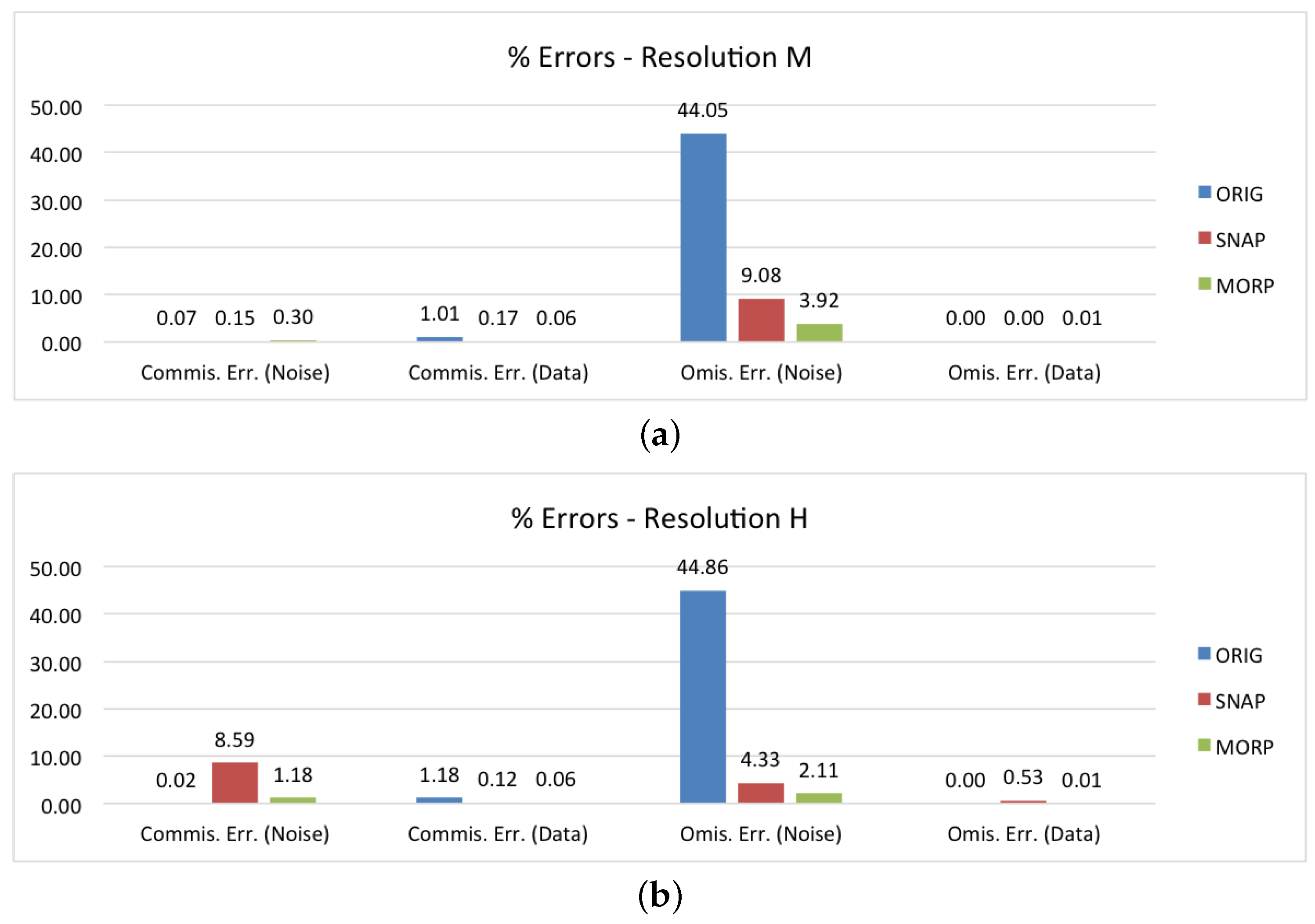
3. Results
4. Conclusions
Author Contributions
Funding
Acknowledgments
Conflicts of Interest
Appendix A. Mathematical Morphology
- Erosion. The erosion of an image I by a structuring element E is defined as the locus of points such that E is included in I when its origin is placed at :
- Dilation. The dilation of an image I by a structuring element E is defined as the locus of points such that E hits I when its origin coincides with :
- Opening. The opening of an image I by a structuring element E is defined as the erosion of I by E followed by the dilation with the reflected :
- Closing. The closing of an image I by a structuring element E is defined as the dilation of I by E followed by the erosion with the reflected :
- Geodesic Dilation. The geodesic dilation of size 1 of a marker image with respect to a mask image (with ) is defined as the point-wise minimum between the mask and the dilation by the elementary isotropic structuring element of the marker:
- Reconstruction by Dilation. The reconstruction by dilation of a mask image from a marker image (with ) is defined as the geodesic dilation of with respect to iterated until stability:
References
- Torres, R.; Snoeij, P.; Geudtner, D.; Bibby, D.; Davidson, M.; Attema, E.; Potin, P.; Rommen, B.; Floury, N.; Brown, M.; et al. GMES Sentinel-1 mission. Remote Sens. Environ. 2012, 120, 9–24. [Google Scholar] [CrossRef]
- Aulard-Macler, M. Sentinel-1 Product Definition; Document Reference MPC-0240; MacDonald, Dettwiler and Associates: Westminster, CO, USA, 2011. [Google Scholar]
- Bourbigot, M. Release Note of S-1 IPF for End Users of Sentinel-1 Products; Document Reference MPC-0389, Collecte Localisation Satellites; European Space Agency: Paris, France, 2018. [Google Scholar]
- Hajduch, G. Masking “No-Value” Pixels on GRD Products Generated by the Sentinel-1 ESA IPF; Document Reference MPC-0243, Collecte Localisation Satellites; European Space Agency: Paris, France, 2018. [Google Scholar]
- Ali, I.; Cao, S.; Naeimi, V.; Paulik, C.; Wagner, W. Methods to Remove the Border Noise From Sentinel-1 Synthetic Aperture Radar Data: Implications and Importance For Time-Series Analysis. IEEE J. Sel. Top. Appl. Earth Obs. Remote Sens. 2018, 11, 777–786. [Google Scholar] [CrossRef] [Green Version]
- Stasolla, M.; Greidanus, H. The exploitation of Sentinel-1 images for vessel size estimation. Remote Sens. Lett. 2016, 7, 1219–1228. [Google Scholar] [CrossRef] [Green Version]
- Monaldo, F.; Jackson, C.; Li, X.; Pichel, W.G. Preliminary evaluation of Sentinel-1A wind speed retrievals. IEEE J. Sel. Top. Appl. Earth Obs. Remote Sens. 2016, 9, 2638–2642. [Google Scholar] [CrossRef]
- Zakhvatkina, N.; Korosov, A.; Muckenhuber, S.; Sandven, S.; Babiker, M. Operational algorithm for ice–water classification on dual-polarized RADARSAT-2 images. Cryosphere 2017, 11, 33–46. [Google Scholar] [CrossRef] [Green Version]
- Luo, Y.; Flett, D. Sentinel-1 Data Border Noise Removal and Seamless Synthetic Aperture Radar Mosaic Generation. Proceedings 2018, 2, 330. [Google Scholar] [CrossRef]
- Zuhlke, M.; Fomferra, N.; Brockmann, C.; Peters, M.; Veci, L.; Malik, J.; Regner, P. SNAP (Sentinel Application Platform) and the ESA Sentinel 3 Toolbox. In Proceedings of the Sentinel-3 for Science Workshop, Venice, Italy, 2–5 June 2015; Volume 734, p. 21. [Google Scholar]
- Twele, A.; Cao, W.; Plank, S.; Martinis, S. Sentinel-1-based flood mapping: A fully automated processing chain. Int. J. Remote Sens. 2016, 37, 2990–3004. [Google Scholar] [CrossRef]
- Dyatmika, H.S.; Sambodo, K.A.; Budiono, M.E. Noise Removal Using Thresholding and Segmentation for Random Noise Sentinel-1 Data; IOP Conference Series: Earth and Environmental Science; IOP Publishing: Bristol, UK, 2017; Volume 54, p. 012105. [Google Scholar] [CrossRef]
- Soille, P. Morphological Image Analysis: Principles and Applications; Springer: New York, NY, USA, 2004. [Google Scholar]
- Gonzalez, R.C.; Woods, R.E. Digital Image Processing, 2nd ed.; Prentice Hall: New York, NY, USA, 2002. [Google Scholar]











{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Mode | Resolution [rg × az] | Pixel Spacing [rg × az] | No of Looks | ENL | Swath Width | ||||
|---|---|---|---|---|---|---|---|---|---|
| M | H | M | H | M | H | M | H | ||
| SM | 84 × 84 m | 23 × 23 m | 40 × 40 m | 10 × 10 m | 22 × 22 m | 6 × 6 m | 398.4 m | 29.7 m | 80 Km |
| EW | 93 × 87 m | 50 × 50 m | 40 × 40 m | 25 × 25 m | 6 × 2 m | 3 × 1 m | 10.7 m | 2.7 m | 410 Km |
| IW | 88 × 87 m | 20 × 22 m | 40 × 40 m | 10 × 10 m | 22 × 5 m | 5 × 1 m | 81.8 m | 4.4 m | 250 Km |
| Mode | SM | EW | IW | ||||||
|---|---|---|---|---|---|---|---|---|---|
| Resolution | M | H | M | H | M | H | |||
| SSH | - | - | 4 | - | - | - | |||
| Polarization | SDH | - | - | 13 | 5 | - | - | ||
| SDV | - | 5 | 2 | - | - | 25 | |||
| No. products | 5 | 24 | 25 | ||||||
| No. images | 10 | 44 | 50 | ||||||
| Mode | Computation Time [s/band] | Avg Image Size [px] | |||||||||||
|---|---|---|---|---|---|---|---|---|---|---|---|---|---|
| Mean | Min | Max | Std Dev | ||||||||||
| MORP | SNAP | MORP | SNAP | MORP | SNAP | MORP | SNAP | ||||||
| SM-H | 33.66 | 11.72 | 12.92 | 9.16 | 44.77 | 13.54 | 12.10 | 1.61 | 10,805 | ||||
| EW-M | 29.72 | 11.24 | 19.80 | 7.51 | 52.66 | 13.61 | 8.86 | 1.63 | 10,112 | ||||
| EW-H | 37.78 | 17.88 | 36.91 | 9.73 | 40.01 | 21.13 | 1.32 | 4.68 | 14,875 | ||||
| IW-H | 50.60 | 30.35 | 40.05 | 16.64 | 102.43 | 39.05 | 18.23 | 5.38 | 20,529 | ||||
© 2018 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Stasolla, M.; Neyt, X. An Operational Tool for the Automatic Detection and Removal of Border Noise in Sentinel-1 GRD Products. Sensors 2018, 18, 3454. https://doi.org/10.3390/s18103454
Stasolla M, Neyt X. An Operational Tool for the Automatic Detection and Removal of Border Noise in Sentinel-1 GRD Products. Sensors. 2018; 18(10):3454. https://doi.org/10.3390/s18103454
Chicago/Turabian StyleStasolla, Mattia, and Xavier Neyt. 2018. "An Operational Tool for the Automatic Detection and Removal of Border Noise in Sentinel-1 GRD Products" Sensors 18, no. 10: 3454. https://doi.org/10.3390/s18103454
APA StyleStasolla, M., & Neyt, X. (2018). An Operational Tool for the Automatic Detection and Removal of Border Noise in Sentinel-1 GRD Products. Sensors, 18(10), 3454. https://doi.org/10.3390/s18103454