Analysis of the Output Characteristics of a Novel Small-Angle Transducer Used in High-Precision Inertial Sensors


Abstract
:1. Introduction
2. Theory
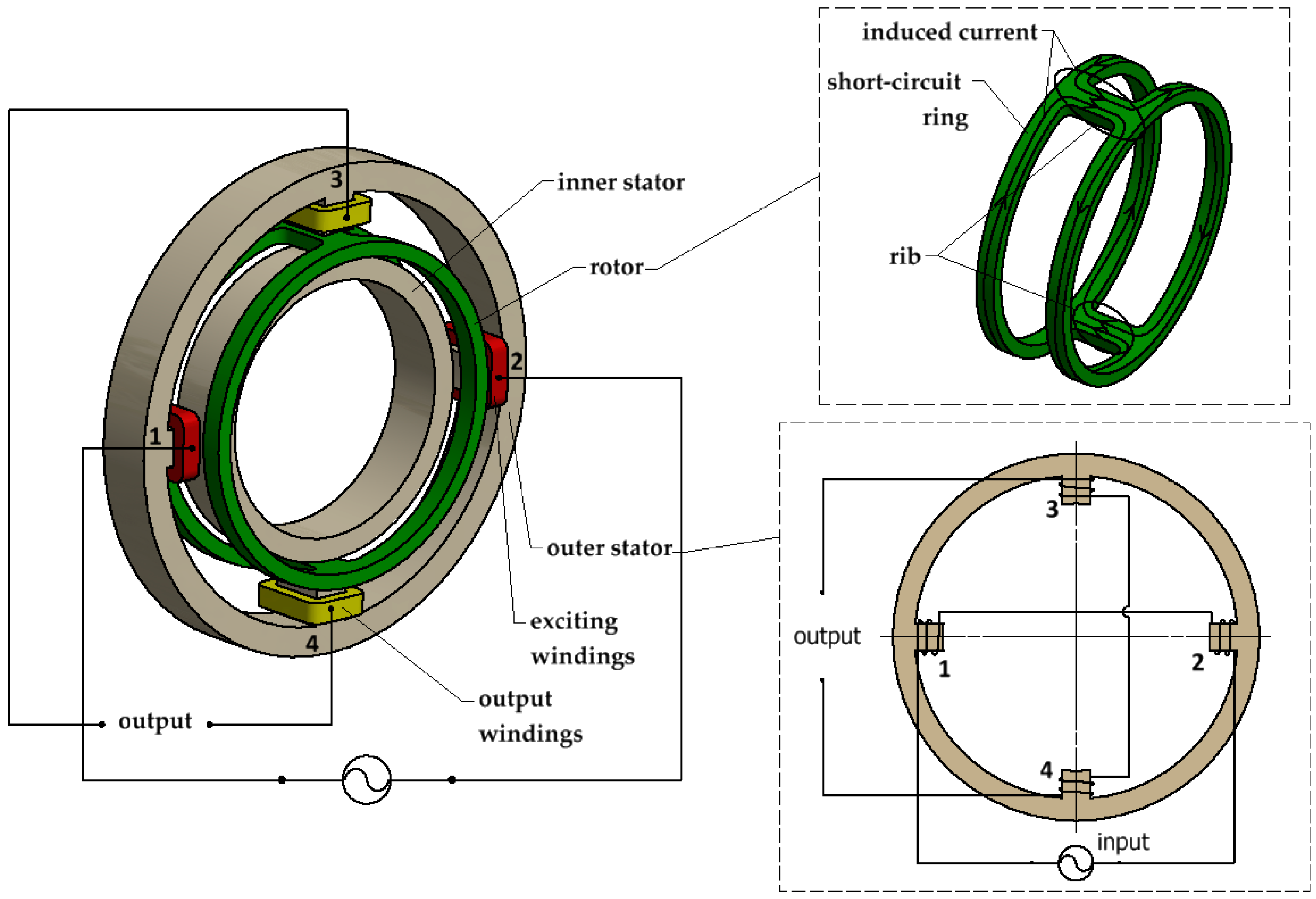
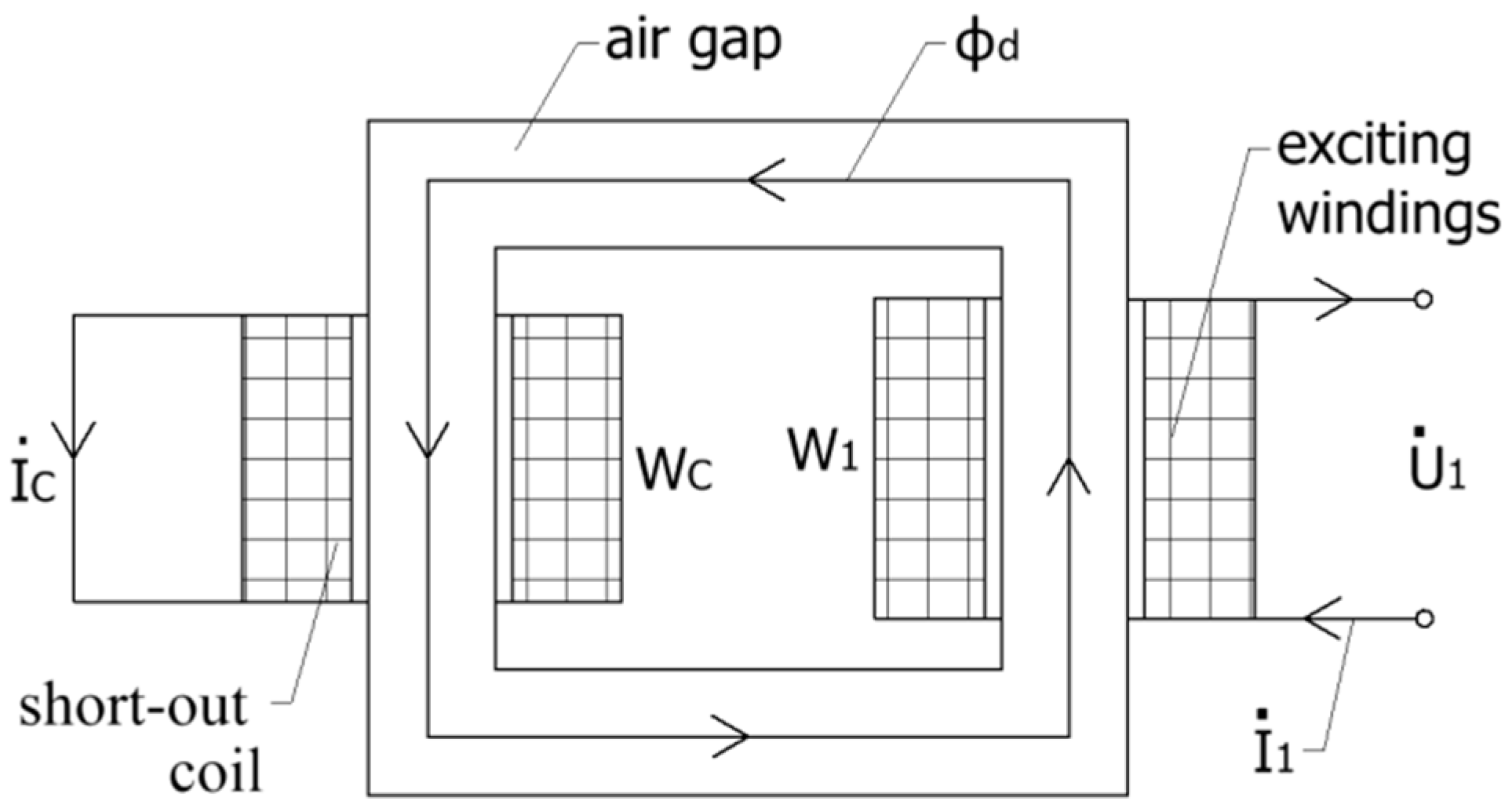
2.1. Working Principle
2.2. The Equivalent Magnetic Resistance and Equivalent Magnetoreactance of a Short-Circuit Ring of Rotors
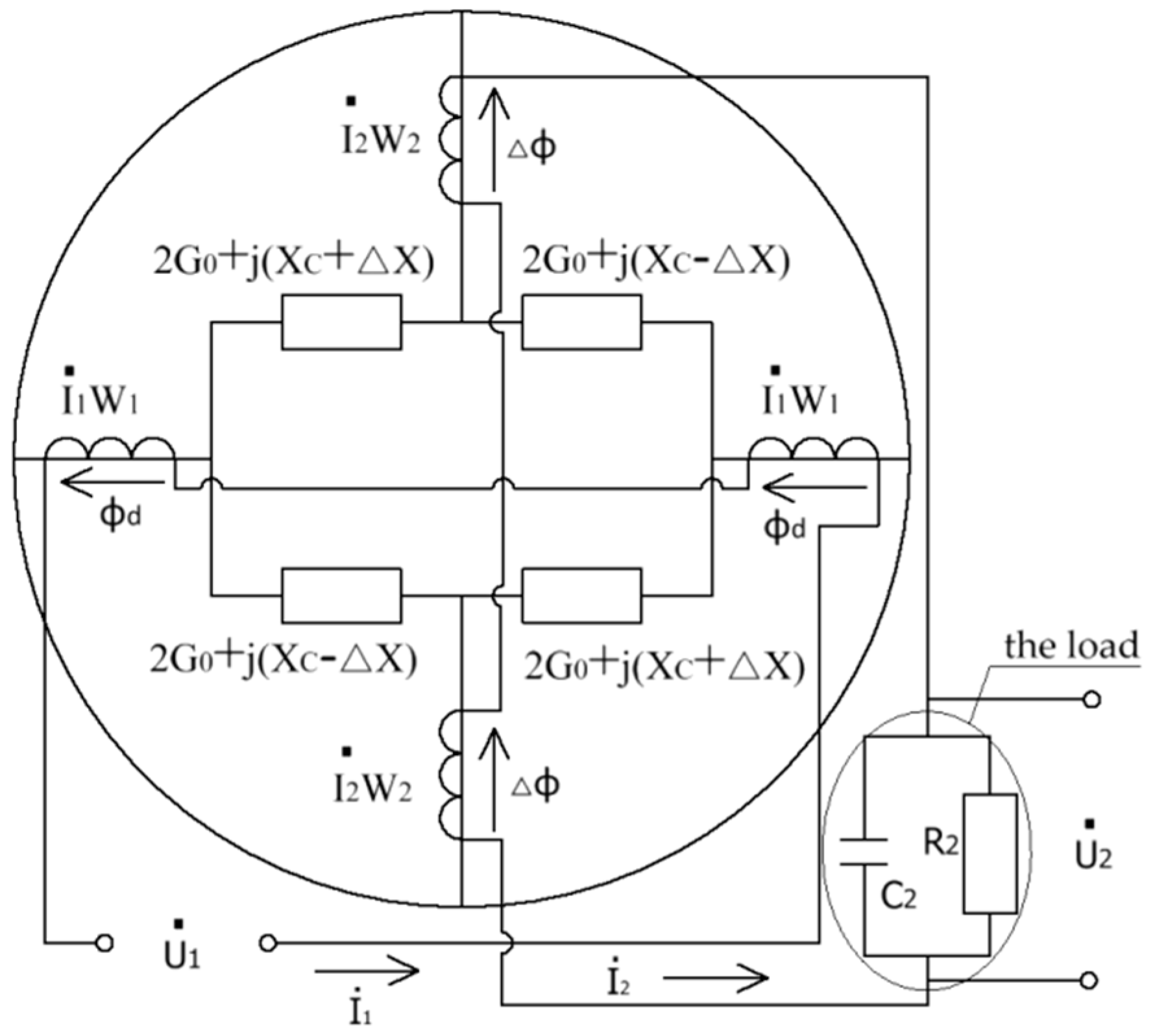
2.3. Theoretical Model of Output Characteristics
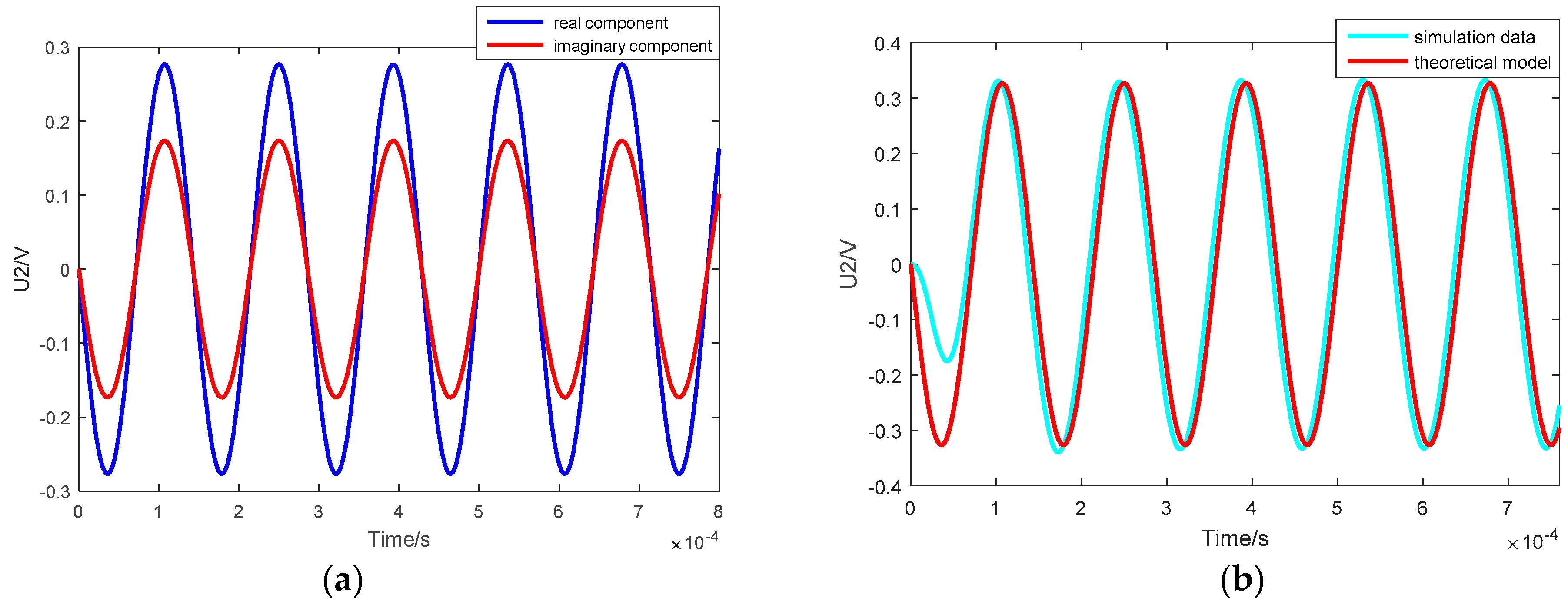
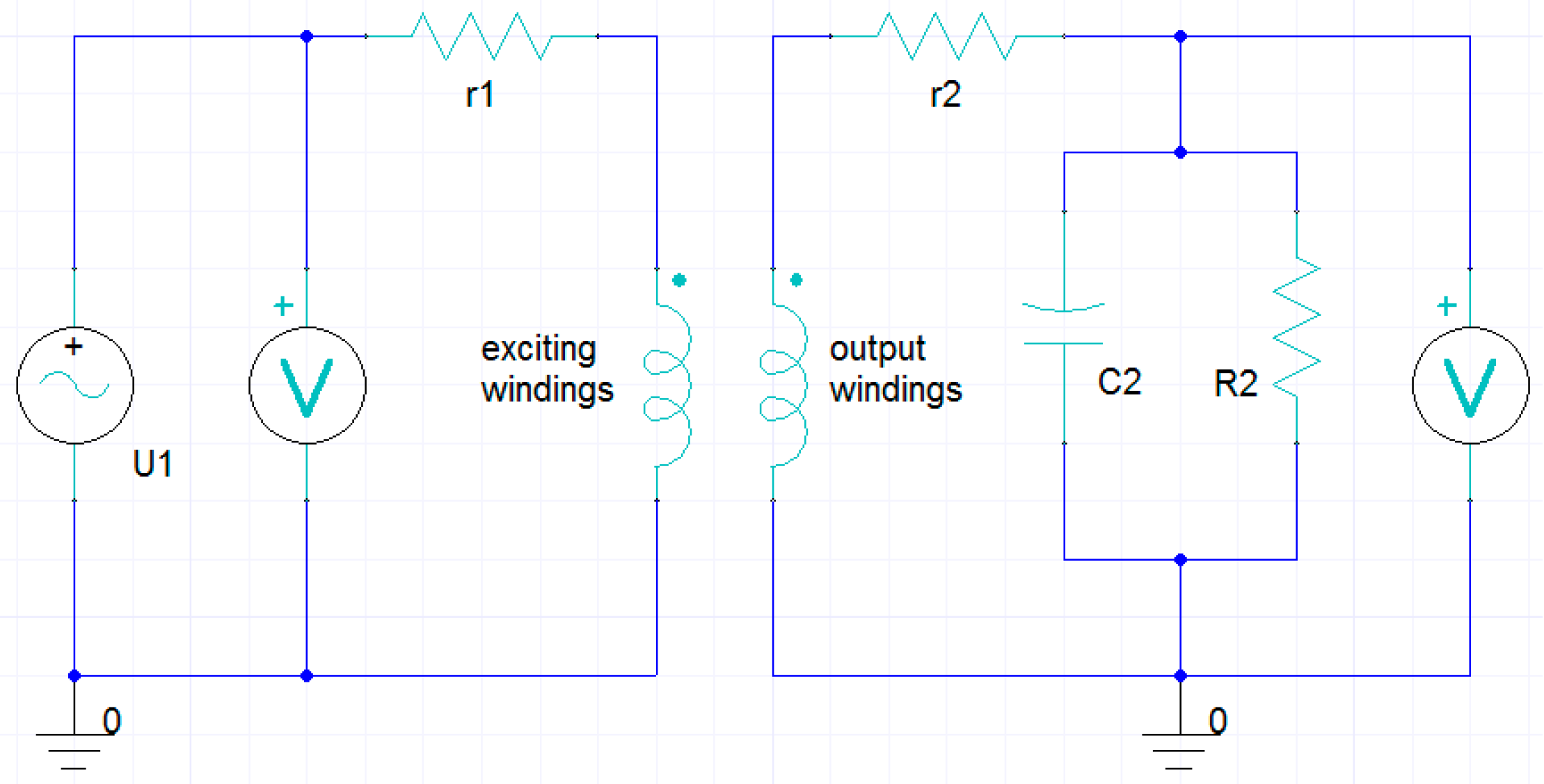
3. Simulation
4. Results and Discussion
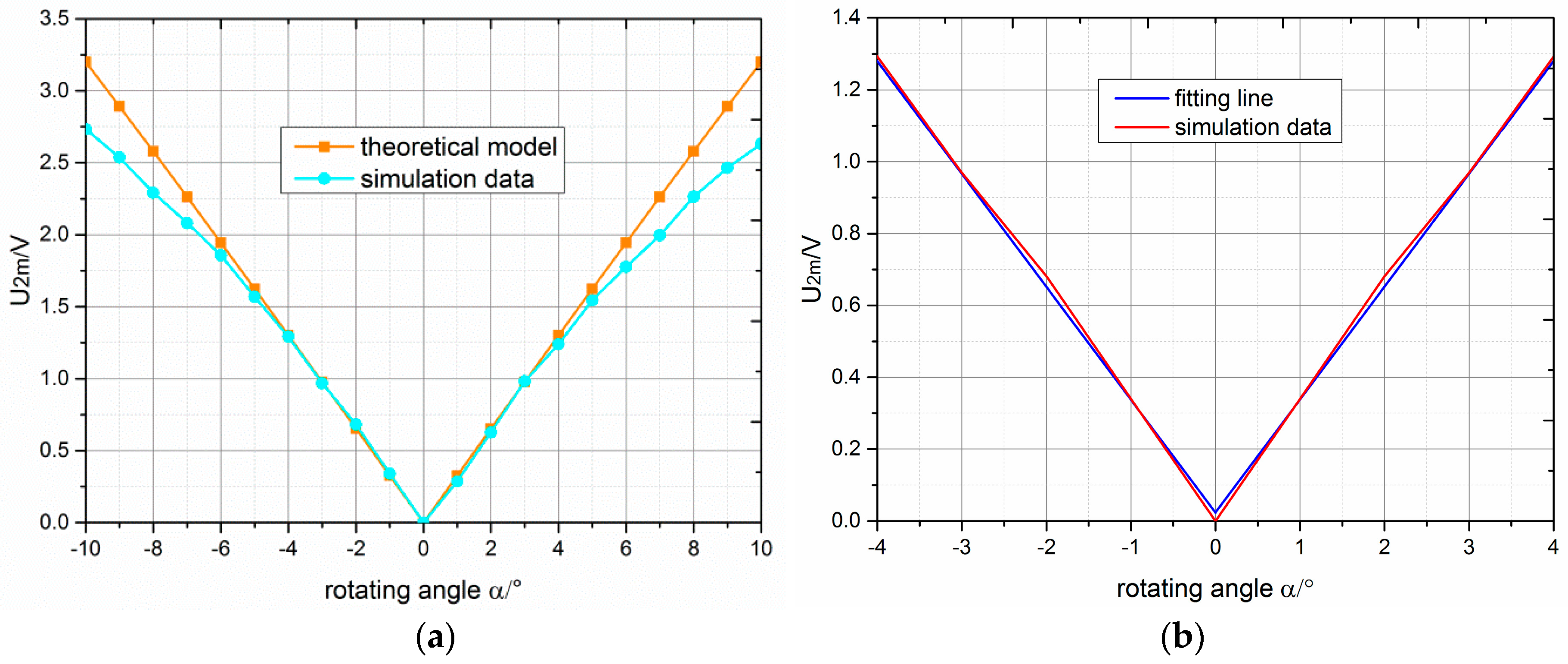
4.1. Analysis of Linearity and Sensitivity
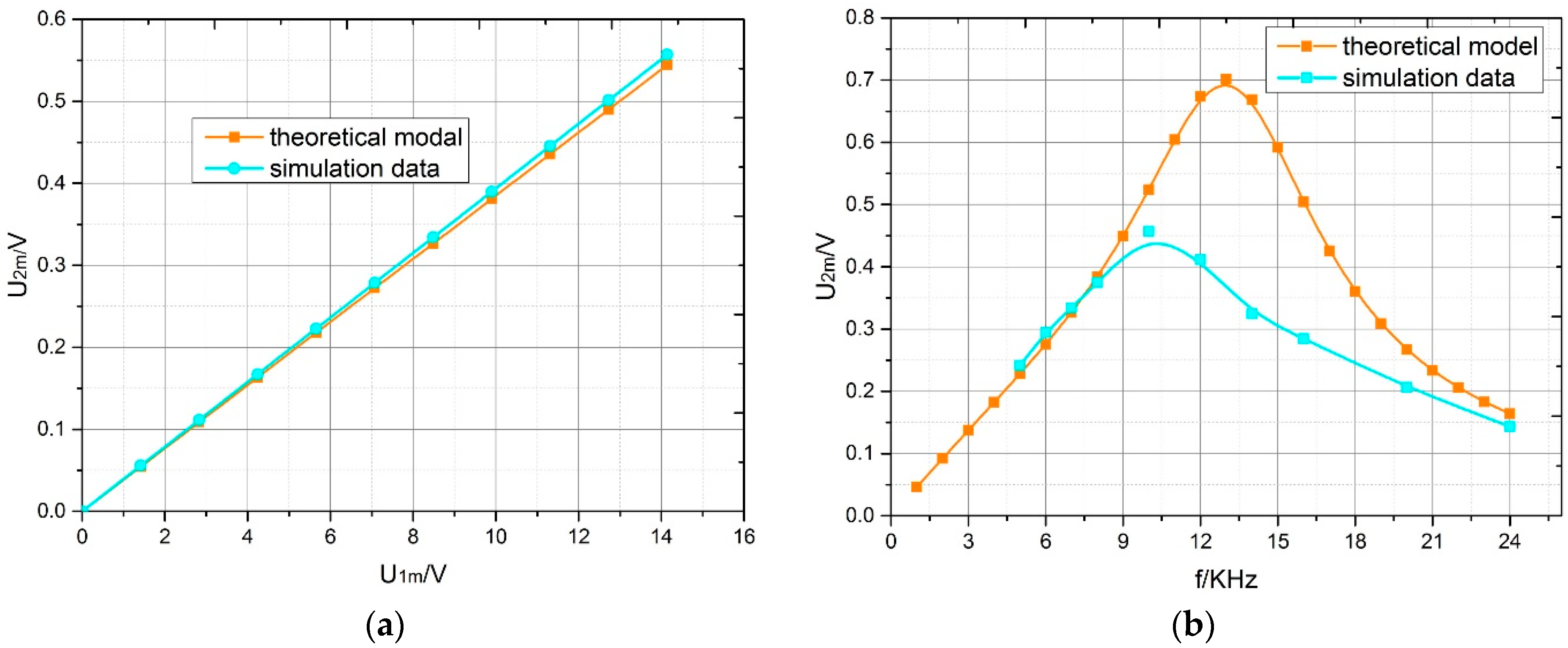
4.2. Influence of Parameters on the Amplitude of Output Voltage
4.3. Discussion on the Optimisation of Parameters
5. Conclusions
Author Contributions
Funding
Conflicts of Interest
References
- Barbour, N.; Schmidt, G. Inertial sensor technology trends. IEEE Sens. J. 2001, 1, 332–339. [Google Scholar] [CrossRef]
- Tan, C.W.; Park, S. Design of accelerometer-based inertial navigation systems. IEEE Trans. Instrum. Meas. 2006, 54, 2520–2530. [Google Scholar] [CrossRef]
- Strachan, V.F. Inertial measurement technology in the satellite navigation environment. J. Navig. 2000, 53, 247–260. [Google Scholar] [CrossRef]
- Ji, Y.; Li, X.; Wu, T.; Zhao, J. Electromechanical inertial sensors test and analysis method-based on identification using adaptive noise cancellation. Trans. Inst. Meas. Control 2015, 37, 475–484. [Google Scholar] [CrossRef]
- Koruba, Z.; Dziopa, Z.; Krzysztofik, I. Dynamics and control of a gyroscope-stabilized platform in a self-propelled anti-aircraft system. J. Theor. Appl. Mech. 2010, 48, 5–26. [Google Scholar]
- Koruba, Z. Dynamics and Control of a Gyroscope-Stabilized Platform in a Ship Anti-Aircraft Rocket Missile Launcher. Solid State Phenom. 2013, 196, 124–139. [Google Scholar] [CrossRef]
- Beitia, J.; Clifford, A.; Fell, C.; Loisel, P. Quartz pendulous accelerometers for navigation and tactical grade systems. Inertial Sens. Syst. Symp. 2015, 29, 1–20. [Google Scholar]
- Lenoir, B.; Lévy, A.; Foulon, B.; Lamine, B.; Christophe, B.; Reynaud, S. Electrostatic accelerometer with bias rejection for gravitation and Solar System physics. Adv. Space Res. 2011, 48, 1248–1257. [Google Scholar] [CrossRef] [Green Version]
- Guptill, E.C.; Mccarty, C.W. An angular position A-C electromotive-force transducer and its application to null-type recorders. Trans. Am. Inst. Electr. Eng. Part 1 2012, 74, 610–613. [Google Scholar] [CrossRef]
- Jankauskas, G.T.; Lacourse, J.R.; Limbert, D.E. Optimization and analysis of a capacitive contactless angular transducer. IEEE Trans. Instrum. Meas. 1992, 41, 311–315. [Google Scholar] [CrossRef]
- Hasty, T.E.; Penn, T.C. An ultra-sensitive angular transducer using ferromagnetic film resonance. IEEE Trans. Instrum. Meas. 2013, 83, 558–561. [Google Scholar] [CrossRef]
- Gurin, N.T.; Novikov, S.G.; Korneev, I.V.; Shtan’Ko, A.A.; Rodionov, V.A. Position-sensitive photodetector for rotation-angle transducers. Tech. Phys. Lett. 2011, 37, 271–273. [Google Scholar] [CrossRef]
- Oliver, F.J. Practical Instrumentation Transducers; Pitman Publishing: New York, NY, USA, 1972. [Google Scholar]
- Neubert, H.K.P. Instrument Transducers: An Introduction to the Performance and Design; Oxford University Press: Oxford, UK, 1984. [Google Scholar]
- Seippel, R.G. Transducers Sensors and Detectors; Reston Publishing Company: Reston, VA, USA, 1983. [Google Scholar]
- Haeck, H.G.; Krohm, F.; Manoli, Y. Data path synthesis from microcontroller instruction set specification in microsyn. Microprocess. Microprog. 1991, 32, 193–198. [Google Scholar] [CrossRef]
- Gryglaszewski, J. Frequency Response Characteristics of a Rate Gyroscope Using a Microsyn. IEEE Trans. Instrum. Meas. 1963, 12, 100–105. [Google Scholar] [CrossRef]
- Takizawa, M.; Otsuki, M.; Suzuki, T. Application of a Passive Magnetic Suspension to a Floated Pendulum Accelerometer: Study on a Magnetic Suspension System for Floated Inertial Sensors (3rd Report). J. Jpn. Soc. Precis. Eng. 1977, 43, 355–362. [Google Scholar] [CrossRef]
- Takizawa, M.; Otsuki, M.; Suzuki, T. Performances and Characteristics of Floated Pendulum Accelerometers with a Passive Magnetic Suspensions: Studies on a Magnetic Suspension System for Floated Inertial Sensors (4th Report). J. Jpn. Soc. Precis. Eng. 1977, 43, 950–955. [Google Scholar] [CrossRef]
- Wang, C.; Li, X.; Kou, K.; Long, C. Optimization of magnetic hat for quartz flexible accelerometer. Sens. Rev. 2016, 36, 71–76. [Google Scholar] [CrossRef]
- Ling, L.; Du, J.; Liu, D.; Qi, G.; Wei, Y. Finite element analysis of electromagnetic field in floated gyro. J. Chin. Inertial Technol. 2010, 18, 240–245. [Google Scholar]




{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Structural Parameters | Electromechanical Parameters | ||
|---|---|---|---|
| 1° | (V) | 8.48 | |
| (mm) | 26 | (Hz) | 7000 |
| (mm) | 2.3 | (Ω) | 45 |
| (mm) | 5 | (Ω) | 240 |
| (rad) | 0.21 | (μF) | 0.022 |
| 200 | (KΩ) | 10 | |
| 560 | (Ω) | 1 | |
© 2018 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Chen, Z.; Dong, J.; Li, X. Analysis of the Output Characteristics of a Novel Small-Angle Transducer Used in High-Precision Inertial Sensors. Sensors 2018, 18, 3478. https://doi.org/10.3390/s18103478
Chen Z, Dong J, Li X. Analysis of the Output Characteristics of a Novel Small-Angle Transducer Used in High-Precision Inertial Sensors. Sensors. 2018; 18(10):3478. https://doi.org/10.3390/s18103478
Chicago/Turabian StyleChen, Zongyu, Jiuzhi Dong, and Xingfei Li. 2018. "Analysis of the Output Characteristics of a Novel Small-Angle Transducer Used in High-Precision Inertial Sensors" Sensors 18, no. 10: 3478. https://doi.org/10.3390/s18103478