Combined System of Magnetic Resonance Sounding and Time-Domain Electromagnetic Method for Water-Induced Disaster Detection in Tunnels


{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
Abstract
:1. Introduction
2. Combined Detection Method
2.1. MRS Method
2.2. TEM Method
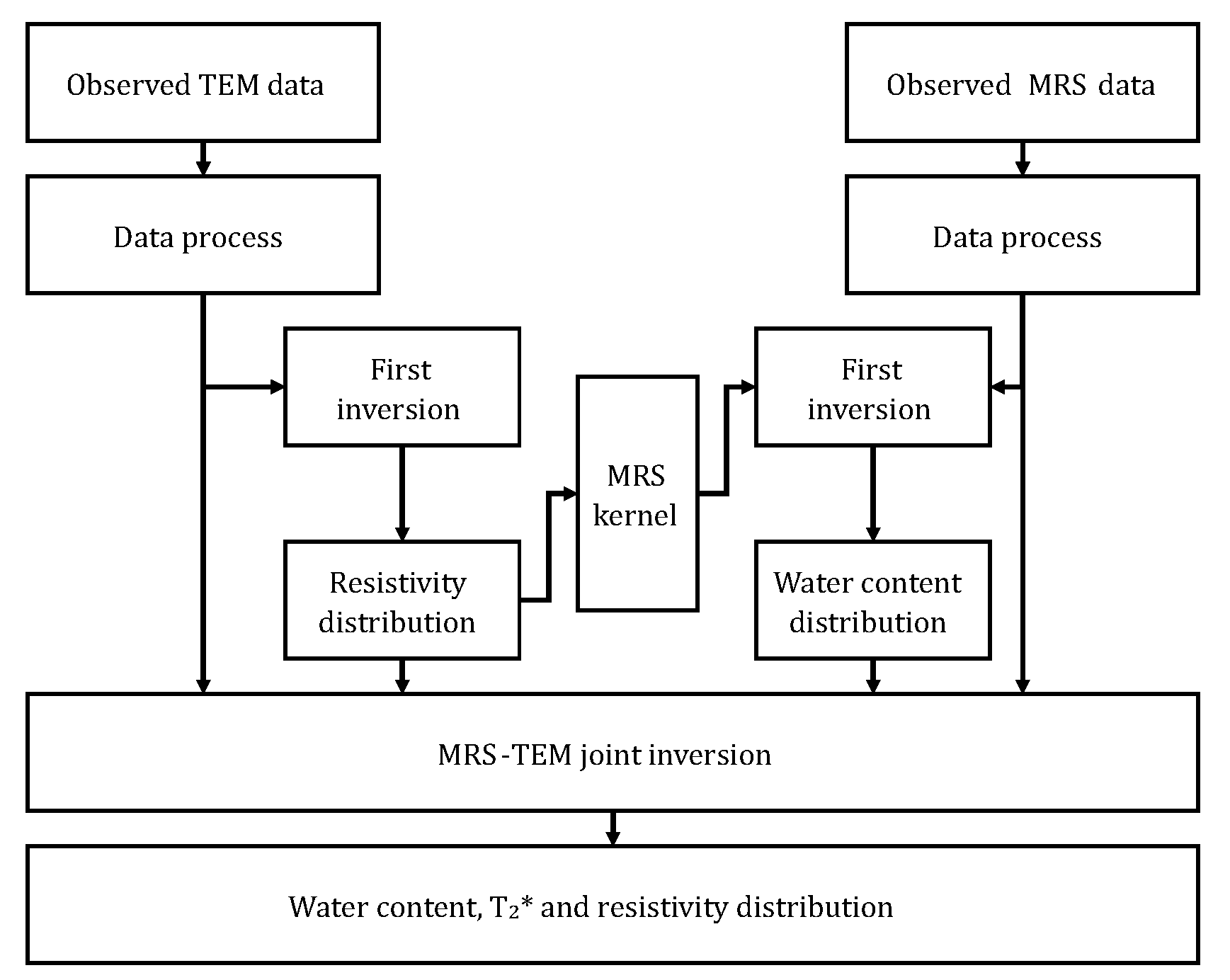
2.3. Combined Interpretation
3. Combined MRS-TEM Instrument
3.1. Instrument Frame
3.2. Transmitter
- Data communication: The transmitter communicates with the laptop via serial ports and Ethernet conversion circuits.
- Transmitter control parameter calculation: The transmitter transmits analog SPI to a Complex Programmable Logic Device (CPLD) via a digital IO port to generate the MRS-based and TEM-based transmission timing signals.
- MRS power control: The transmitter is capable of increasing or decreasing the output voltage according to the commands from the laptop.
- TEM transmission switch-off current collection: The transmitter can achieve current-data acquisition with 12-bit accuracy, an 800-Kps sample rate and a 1-ms collection time via an integrated Analog-to-Digital converter (ADC) in the MCU.
- GPS unit configuration: The transmitter acquires GPS data via serial ports.
3.3. Receiver
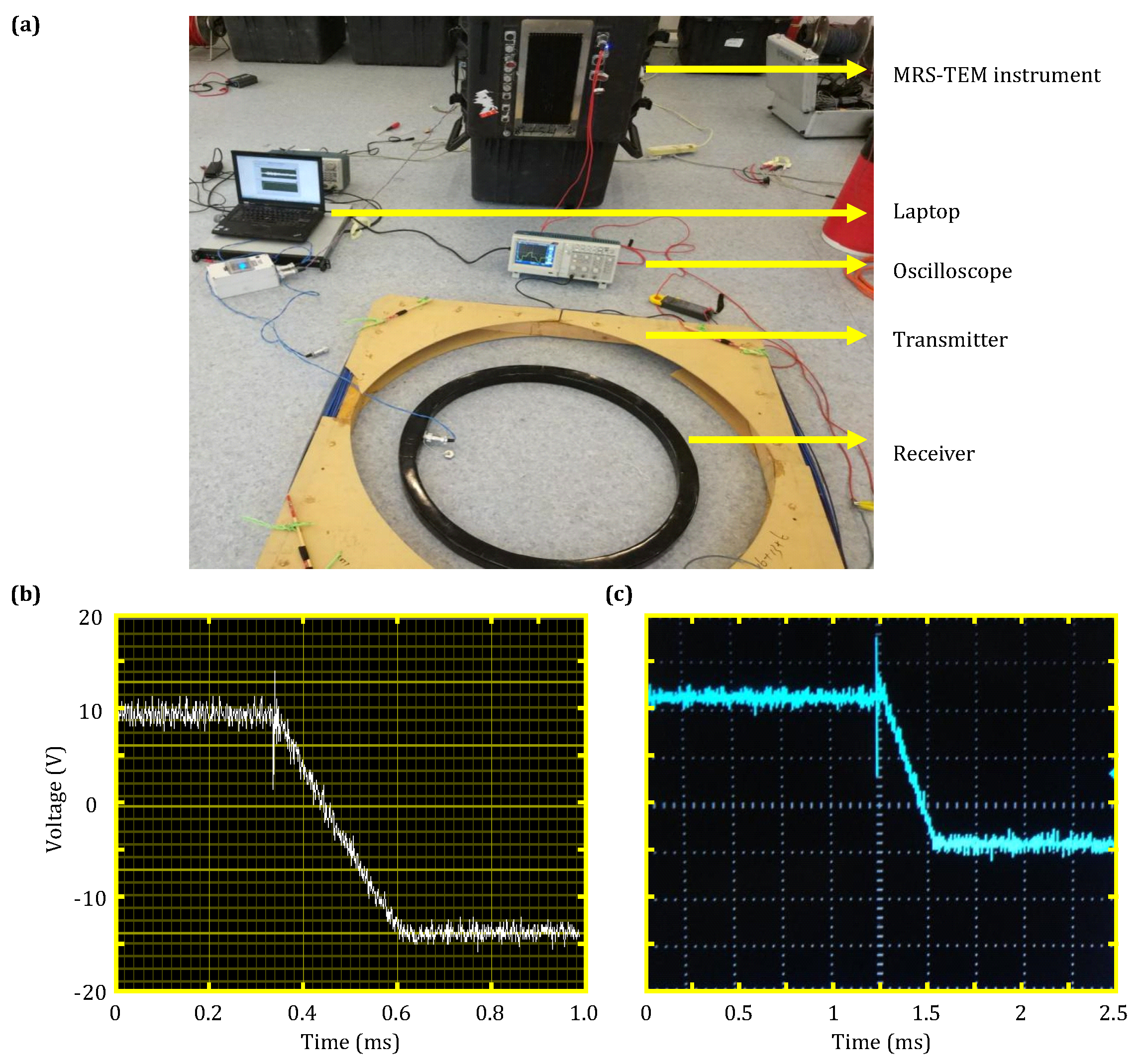
4. Combined System Test
4.1. MRS Function Test
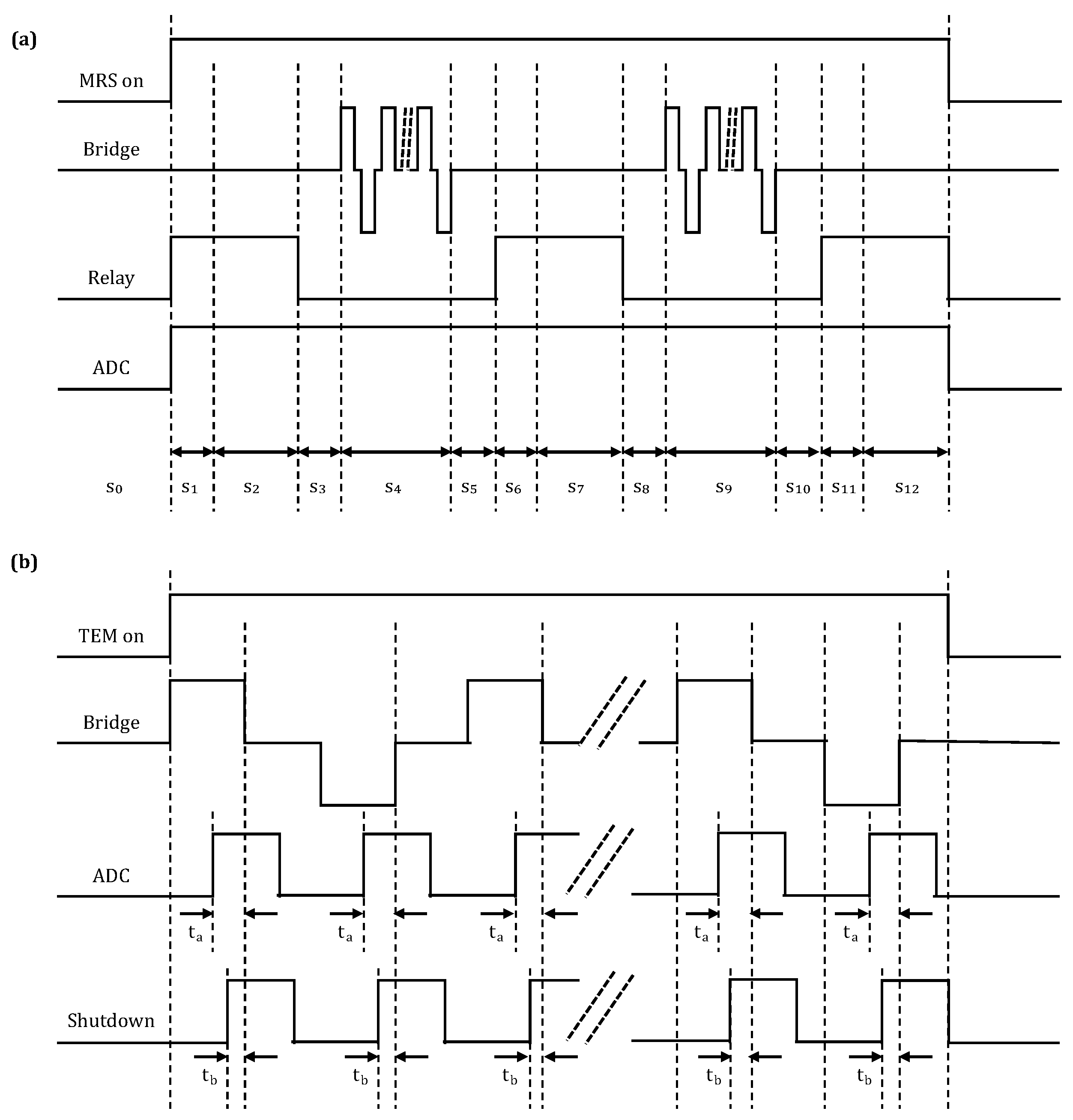
4.1.1. Control Timing Test
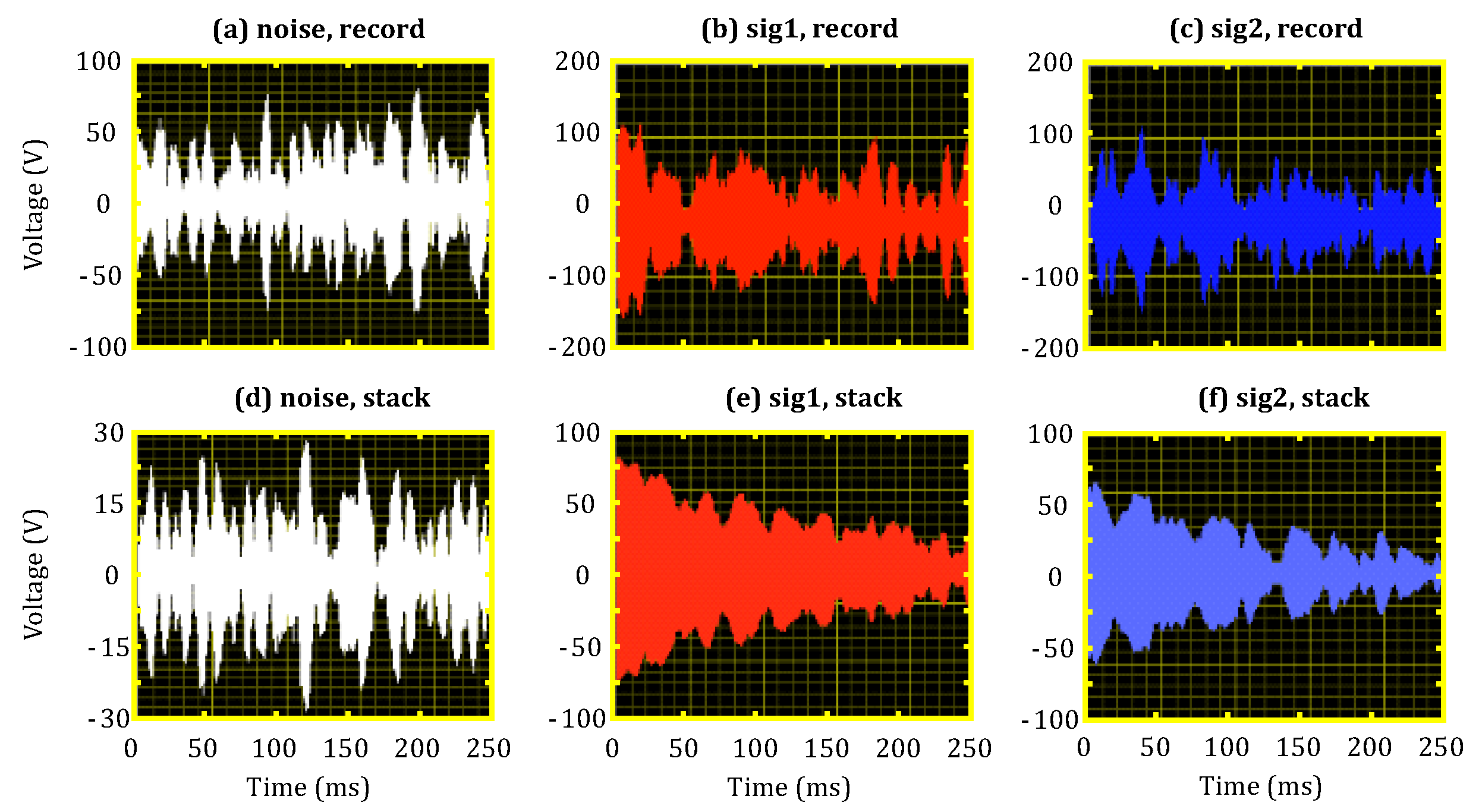
4.1.2. Receiver Signal Test
4.2. TEM Functionality Test
4.2.1. Control Timing Test
4.2.2. Control Timing Test
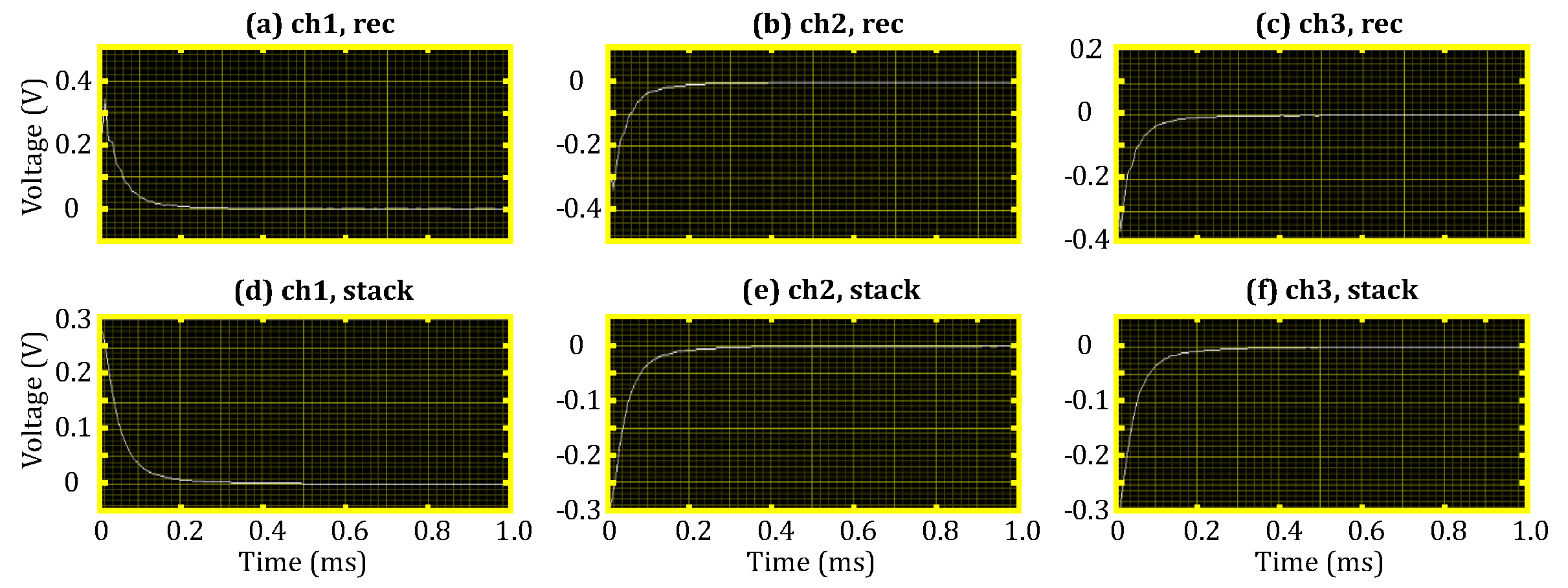
4.2.3. TEM Transmission Switch-Off Current Test
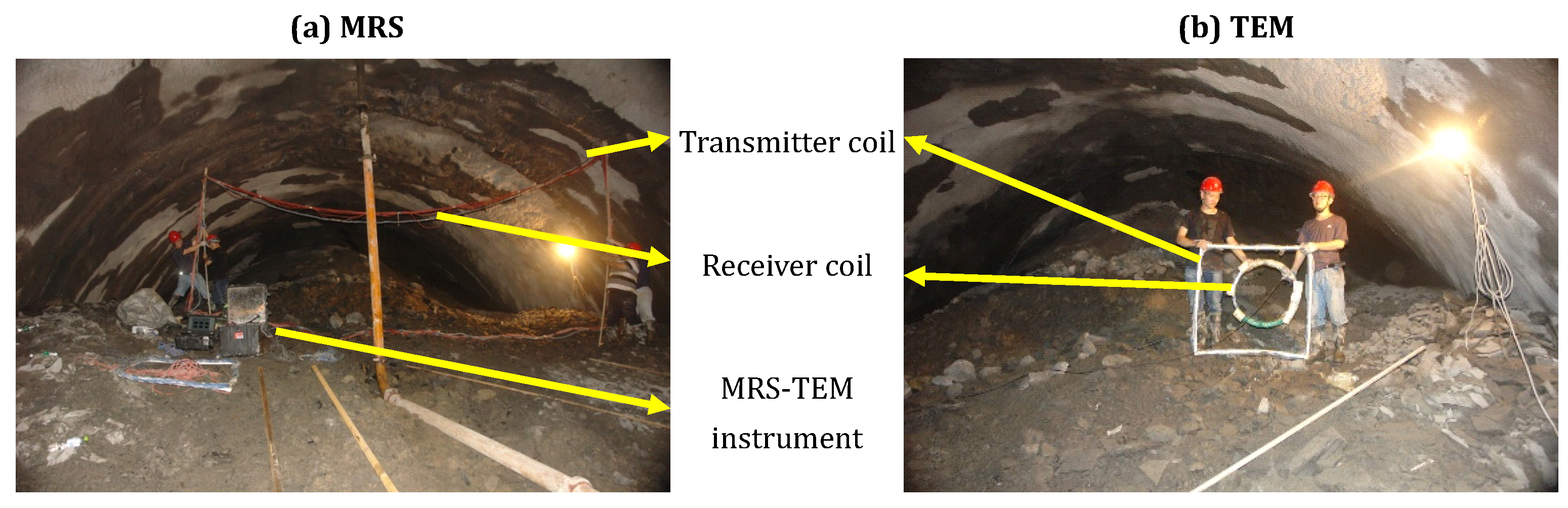
4.3. Advanced Detection Test for the Combined Instrument
5. Conclusions
Author Contributions
Funding
Conflicts of Interest
References
- Li, S.; Zhou, Z.; Ye, Z.; Li, L.; Zhang, Q.; Xu, Z. Comprehensive geophysical prediction and treatment measures of karst caves in deep buried tunnel. J. Appl. Geophys. 2015, 116, 247–257. [Google Scholar] [CrossRef]
- Zhao, Y.; Li, P.; Tian, S. Prevention and treatment technologies of railway tunnel water inrush and mud gushing in China. J. Rock Mech. Geotechn. Eng. 2013, 5, 468–477. [Google Scholar] [CrossRef]
- Auken, E.; Boesen, T.; Christiansen, A.V. A Review of airborne electromagnetic methods with focus on geotechnical and hydrological applications from 2007 to 2017. Adv. Geophys. 2017, 58, 47–93. [Google Scholar]
- Legchenko, A.; Valla, P. A review of the basic principles for proton magnetic resonance sounding measurements. J. Appl. Geophys. 2002, 50, 3–19. [Google Scholar] [CrossRef]
- Braun, M.; Hertrich, M.; Yaramanci, U. Study on complex inversion of magnetic resonance sounding signals. Near Surf. Geophys. 2005, 3, 155–163. [Google Scholar] [CrossRef]
- Weichman, P.B.; Lavely, E.M.; Ritzwoller, M.H. Theory of surface nuclear magnetic resonance with applications to geophysical imaging problems. Phys. Rev. E 2000, 62, 1290–1312. [Google Scholar] [CrossRef]
- Braun, M.; Yaramanci, U. Inversion of resistivity in magnetic resonance sounding. J. Appl. Geophys. 2008, 66, 151–164. [Google Scholar] [CrossRef]
- Legchenko, A.; Ezersky, M.; Camerlynck, C.; Al-Zoubi, A.; Chalikakis, K. Joint use of TEM and MRS methods in a complex geological setting. Comptes Rendus Geosci. 2009, 341, 908–917. [Google Scholar] [CrossRef]
- Auken, E.; Christiansen, A.V.; Kirkegaard, C.; Fiandaca, G.; Schamper, C.; Behroozmand, A.A.; Binley, A.; Nielsen, E.; Effersö, F.; Christensen, N.B.; et al. An overview of a highly versatile forward and stable inverse algorithm for airborne, ground-based and borehole electromagnetic and electric data. Explor. Geophys. 2015, 46, 223–235. [Google Scholar] [CrossRef]
- Wan, L.; Lin, T.T.; Lin, J.; Jiang, C.-D.; Ji, Y.-J. Joint inversion of MRS and TEM data based on adaptive genetic algorithm. Chin. J. Geophys. 2013, 56, 3728–3740. [Google Scholar]
- Walsh, D.O. Multi-channel surface NMR instrumentation and software for 1D/2D groundwater investigations. J. Appl. Geophys. 2008, 66, 140–150. [Google Scholar] [CrossRef]
- Legchenko, A.; Baltassat, J.M.; Bobachev, A.; Martin, C.; Robain, H.; Vouillamoz, J.M. Magnetic resonance sounding applied to aquifer characterization. Groundwater 2004, 42, 363–373. [Google Scholar] [CrossRef]
- Yi, X.; Zhang, J.; Fan, T.; Tian, B.; Jiang, C. Design of meter-scale antenna and signal detection system for underground magnetic resonance sounding in mines. Sensors 2018, 18, 848. [Google Scholar] [CrossRef] [PubMed]
- Qin, S.; Ma, Z.; Jiang, C.; Lin, J.; Xue, Y.; Shang, X.; Li, Z. Response characteristics and experimental study of underground magnetic resonance sounding using a small-coil sensor. Sensors 2017, 17, 2127. [Google Scholar] [CrossRef] [PubMed]
- Lin, T.; Yang, Y.; Yi, X.; Jiang, C.; Fan, T. First evidence of the detection of an underground nuclear magnetic resonance signal in a tunnel. J. Environ. Eng. Geophys. 2018, 23, 77–88. [Google Scholar]
- Lin, J.; Jiang, C.; Lin, T.; Duan, Q.; Wang, Y.; Shang, X.; Fan, T.; Sun, S.; Tian, B.; Zhao, J.; et al. Underground magnetic resonance sounding (UMRS) for detection of disastrous water in mining and tunneling. Chin. J. Geophys. 2013, 56, 3619–3628. [Google Scholar]
- Callaghan, P.T. Principles of Nuclear Magnetic Resonance Microscopy; Oxford University Press: Oxford, UK, 2007. [Google Scholar]
- Hertrich, M. Imaging of groundwater with nuclear magnetic resonance. Prog. Nucl. Magn. Reson. Spectrosc. 2008, 53, 227–248. [Google Scholar] [CrossRef]
- Hertrich, M.; Green, A.G.; Braun, M.; Yaramanci, U. High-resolution surface-NMR tomography of shallow aquifers based on multi-offset measurements. Geophysics 2009, 74, G47–G59. [Google Scholar] [CrossRef]
- Behroozmand, A.; Keating, K.; Auken, E. A Review of the principles and applications of the NMR technique for near-surface characterization. Surv. Geophys. 2015, 36, 27–85. [Google Scholar] [CrossRef]
- Li, X.; Zhang, Y.Y.; Lu, X.S.; Yao, W.H. Inverse synthetic aperture imaging of ground-airborne transient electromagnetic method with a galvanic source. Chin. J. Geophys. 2015, 58, 277–288. [Google Scholar]
- Commer, M.; Hoversten, G.M.; Um, E.S. Transient-electromagnetic finite-difference time-domain earth modeling over steel infrastructure. Geophysics 2015, 80, E147–E162. [Google Scholar] [CrossRef]
- Li, J.; Farquharson, C.G.; Hu, X. Three effective inverse Laplace transform algorithms for computing time-domain electromagnetic responses. Geophysics 2016, 81, E113–E128. [Google Scholar] [CrossRef]
- Swidinsky, A.; Nabighian, M. Transient electromagnetic fields of a buried horizontal magnetic dipole. Geophysics 2016, 81, E481–E491. [Google Scholar] [CrossRef]
- Mueller-Petke, M.; Yaramanci, U. QT inversion—Comprehensive use of the complete surface NMR data set. Geophysics 2010, 75, WA199–WA209. [Google Scholar] [CrossRef]
- Günther, T.; Rücker, C.; Spitzer, K. Three-dimensional modeling and inversion of dc resistivity data incorporating topography—Part II: Inversion. Geophys. J. Int. 2006, 166, 506–517. [Google Scholar] [CrossRef]





© 2018 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Shang, X.; Jiang, C.; Ma, Z.; Qin, S. Combined System of Magnetic Resonance Sounding and Time-Domain Electromagnetic Method for Water-Induced Disaster Detection in Tunnels. Sensors 2018, 18, 3508. https://doi.org/10.3390/s18103508
Shang X, Jiang C, Ma Z, Qin S. Combined System of Magnetic Resonance Sounding and Time-Domain Electromagnetic Method for Water-Induced Disaster Detection in Tunnels. Sensors. 2018; 18(10):3508. https://doi.org/10.3390/s18103508
Chicago/Turabian StyleShang, Xinlei, Chuandong Jiang, Zhongjun Ma, and Shengwu Qin. 2018. "Combined System of Magnetic Resonance Sounding and Time-Domain Electromagnetic Method for Water-Induced Disaster Detection in Tunnels" Sensors 18, no. 10: 3508. https://doi.org/10.3390/s18103508