Passive Harmonic RFID System for Buried Assets Localization

 , ,
, ,
Abstract
:1. Introduction
2. Harmonic Tag
2.1. Frequency Bands and Regulations
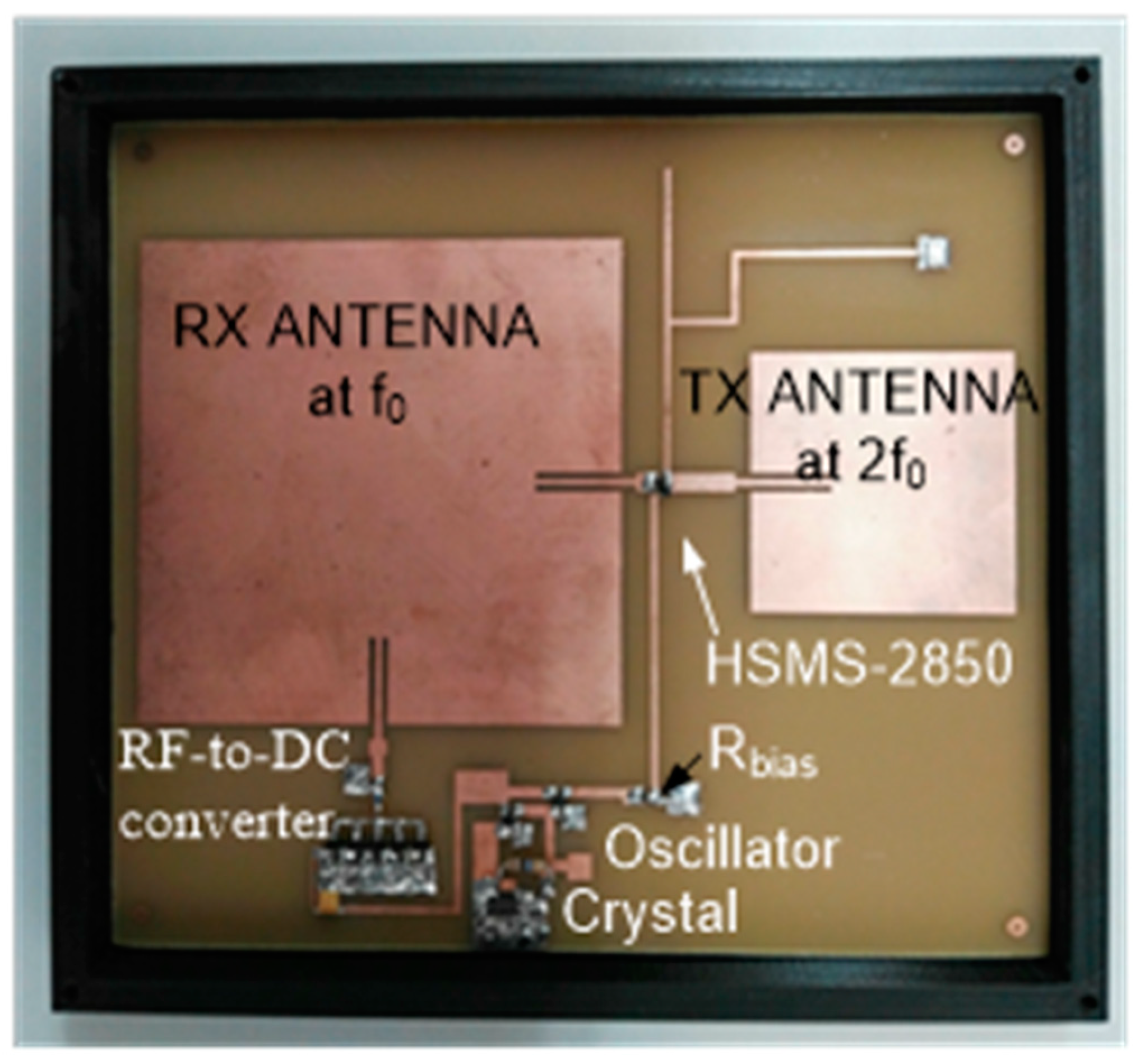
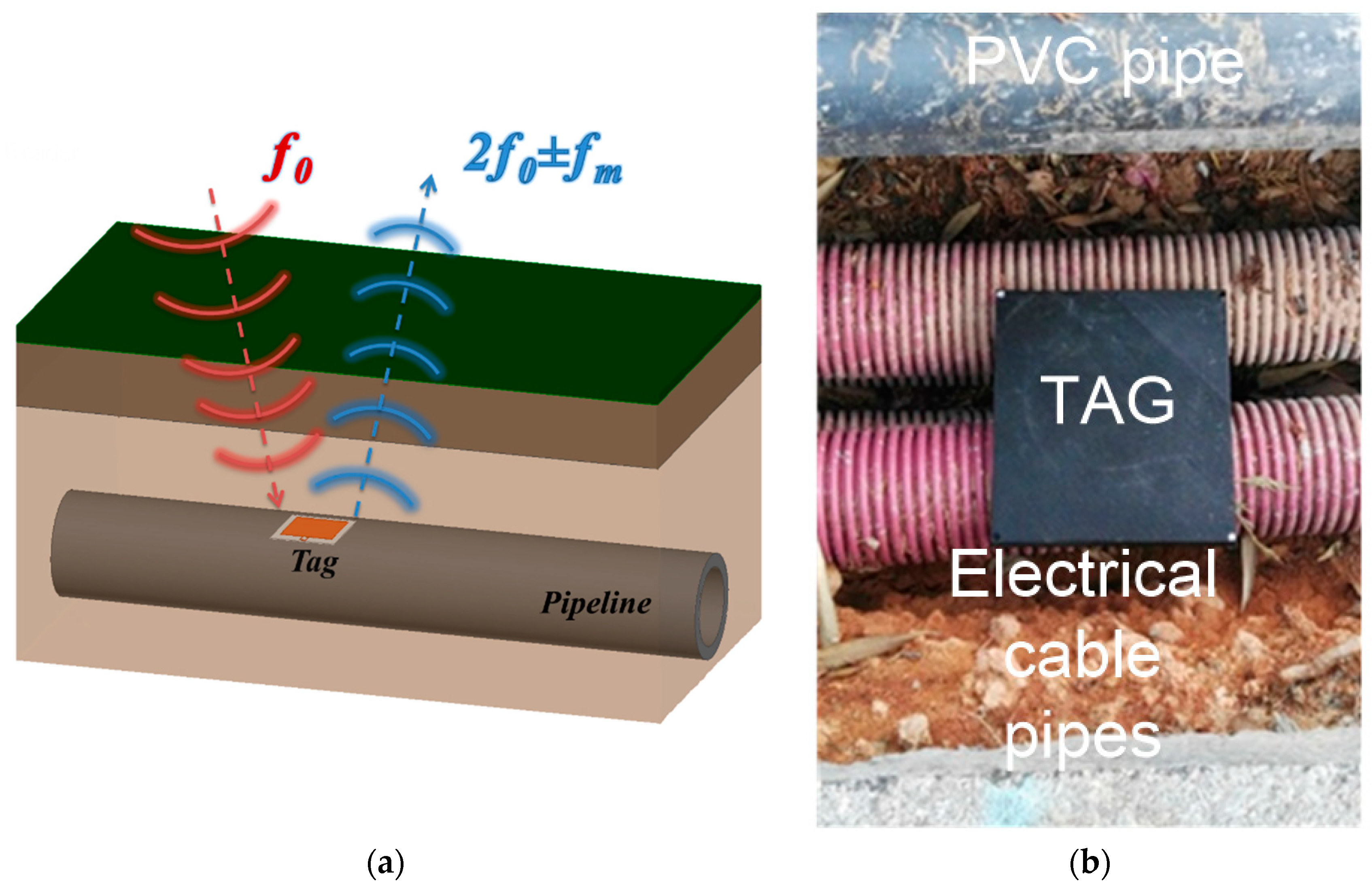
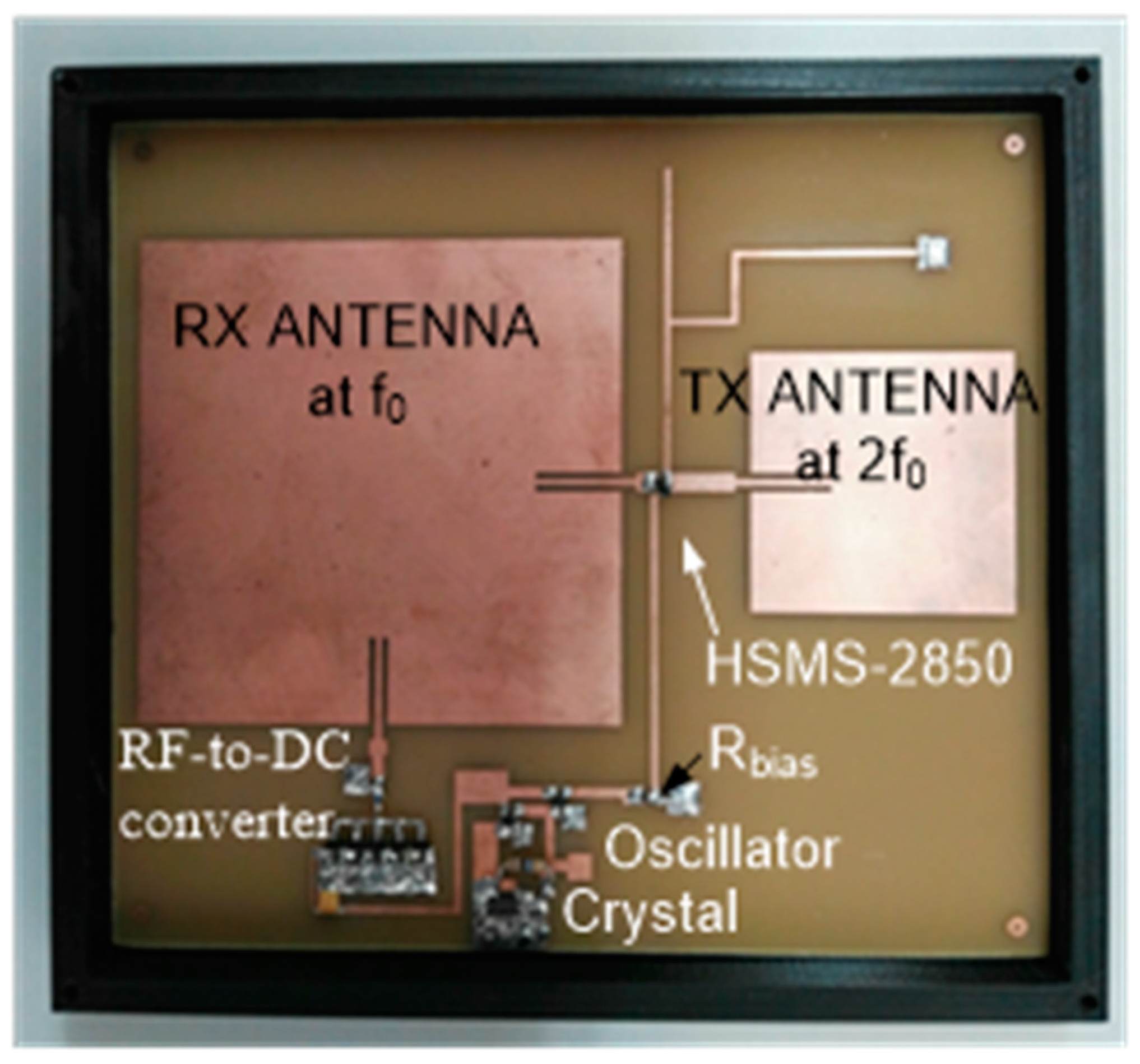
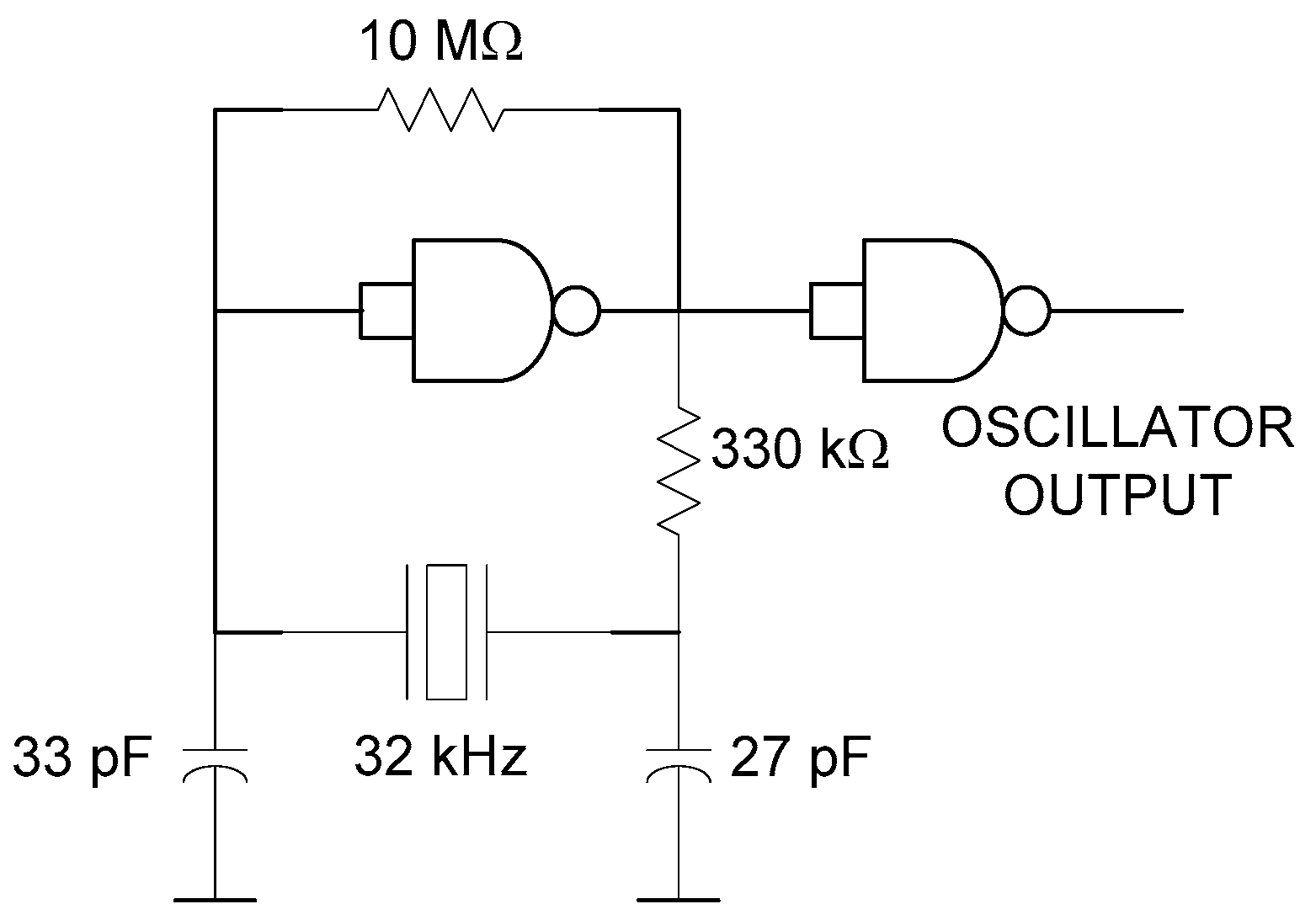
2.2. System Operation and Tag Description
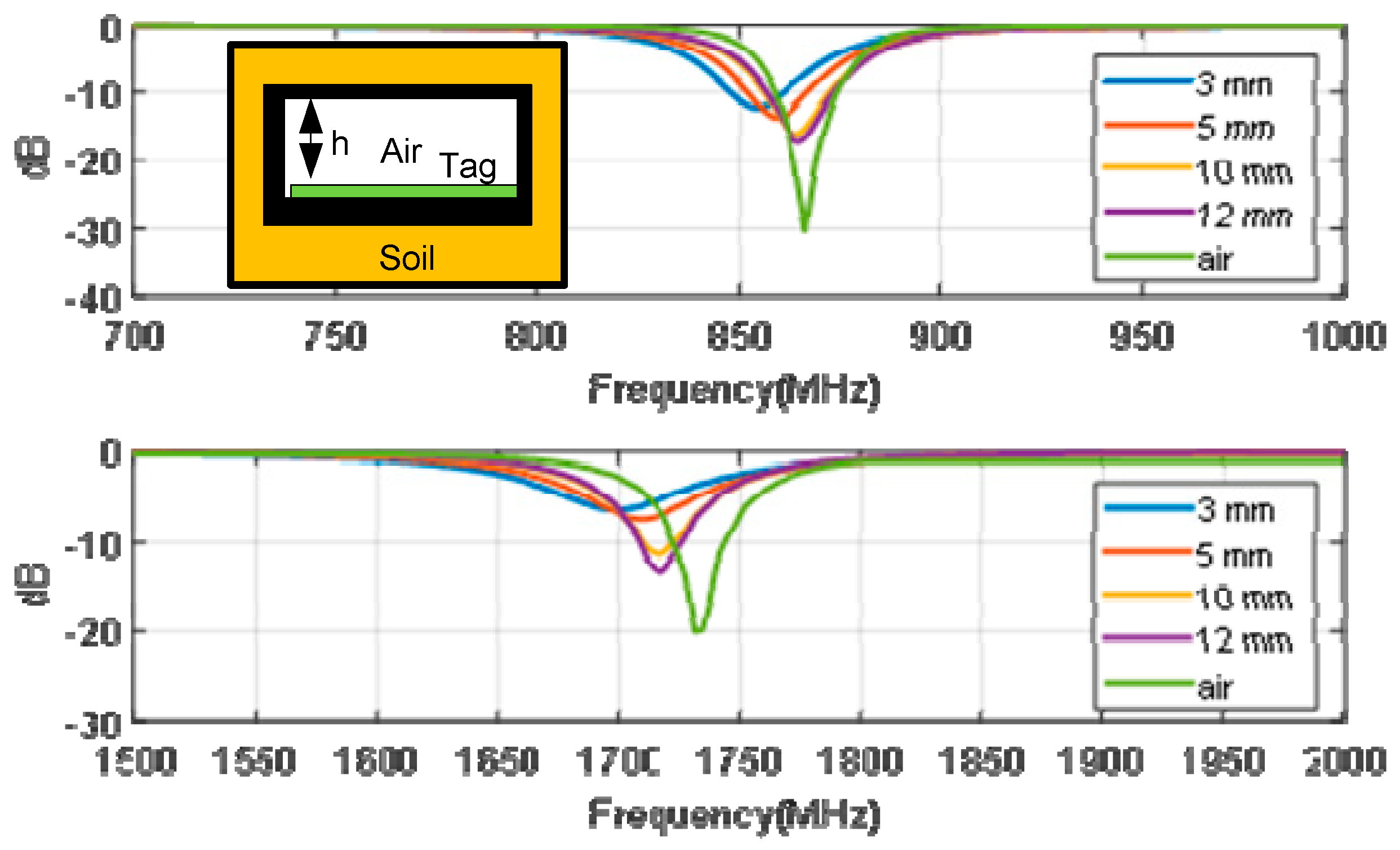
2.3. Tag Antenna Design
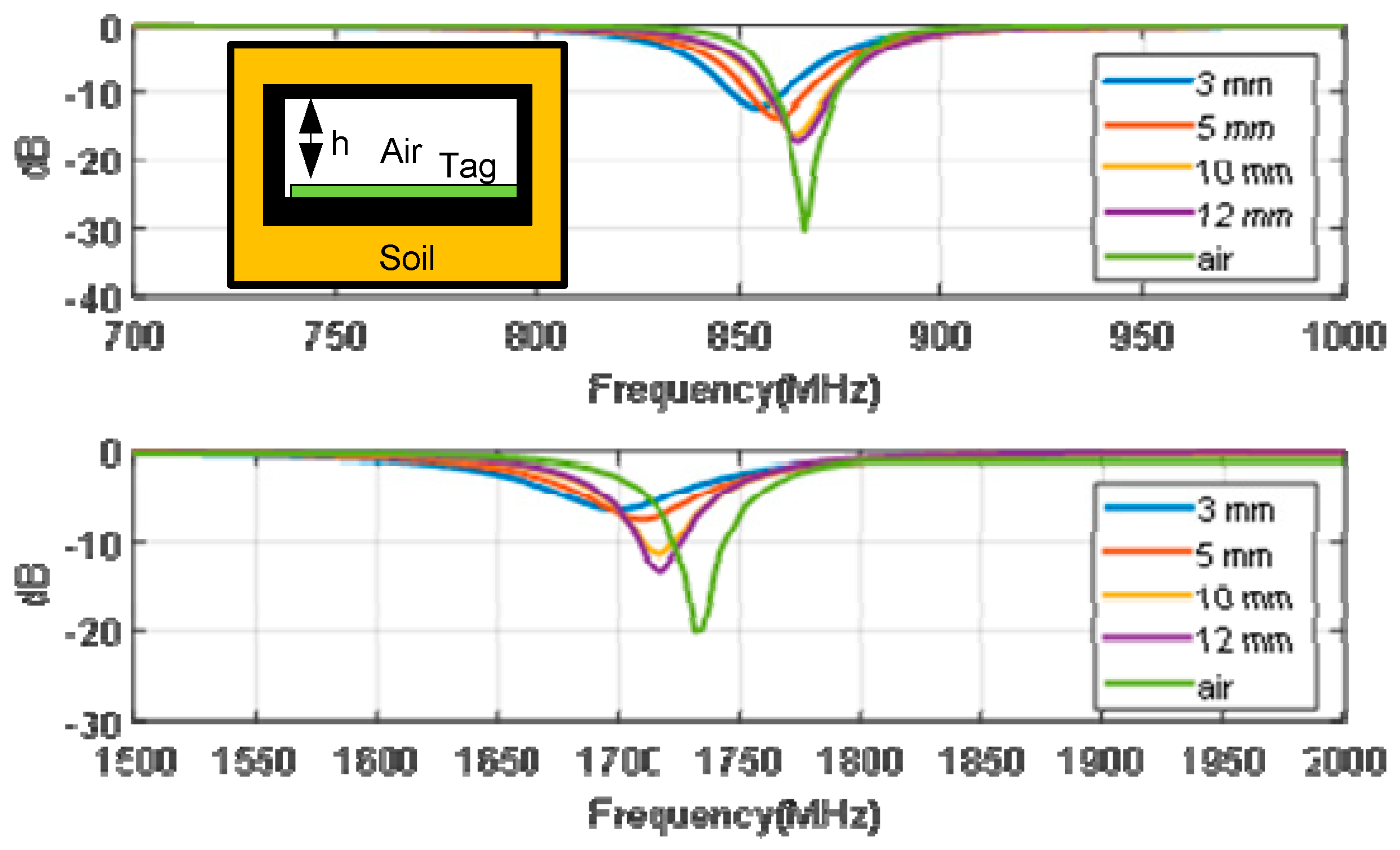
2.4. Tag Characterization
3. Read Range
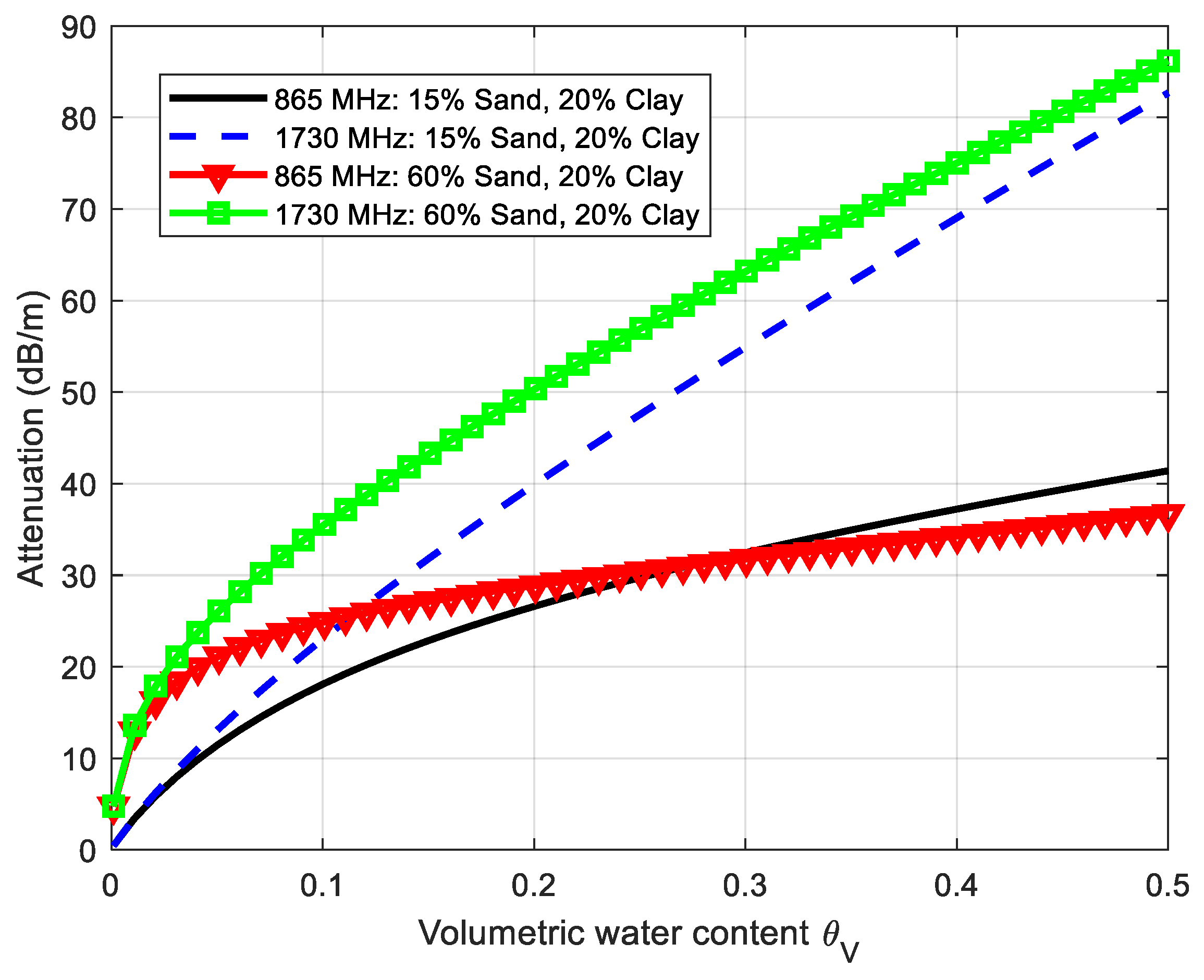
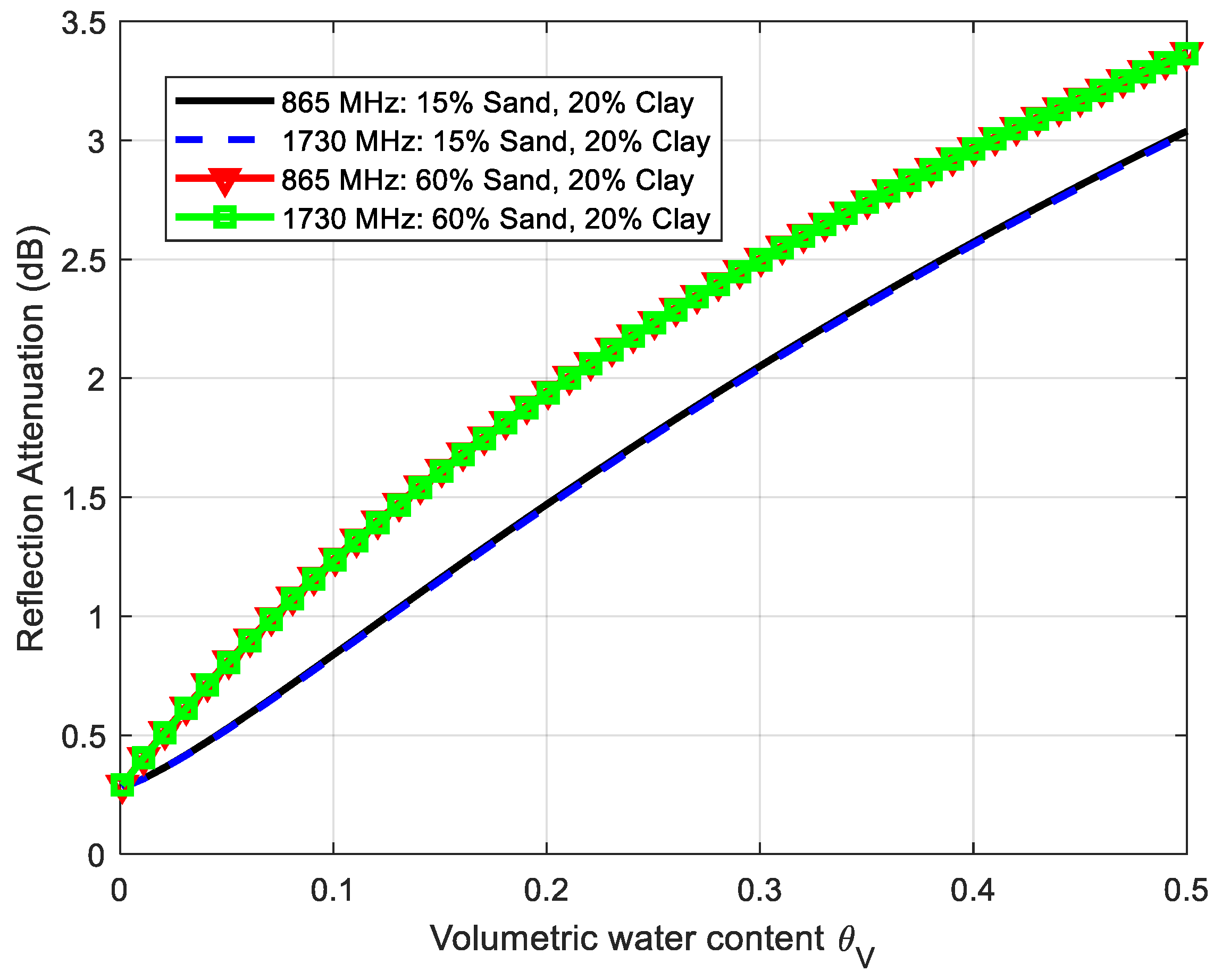
3.1. Soil Attenuation Model
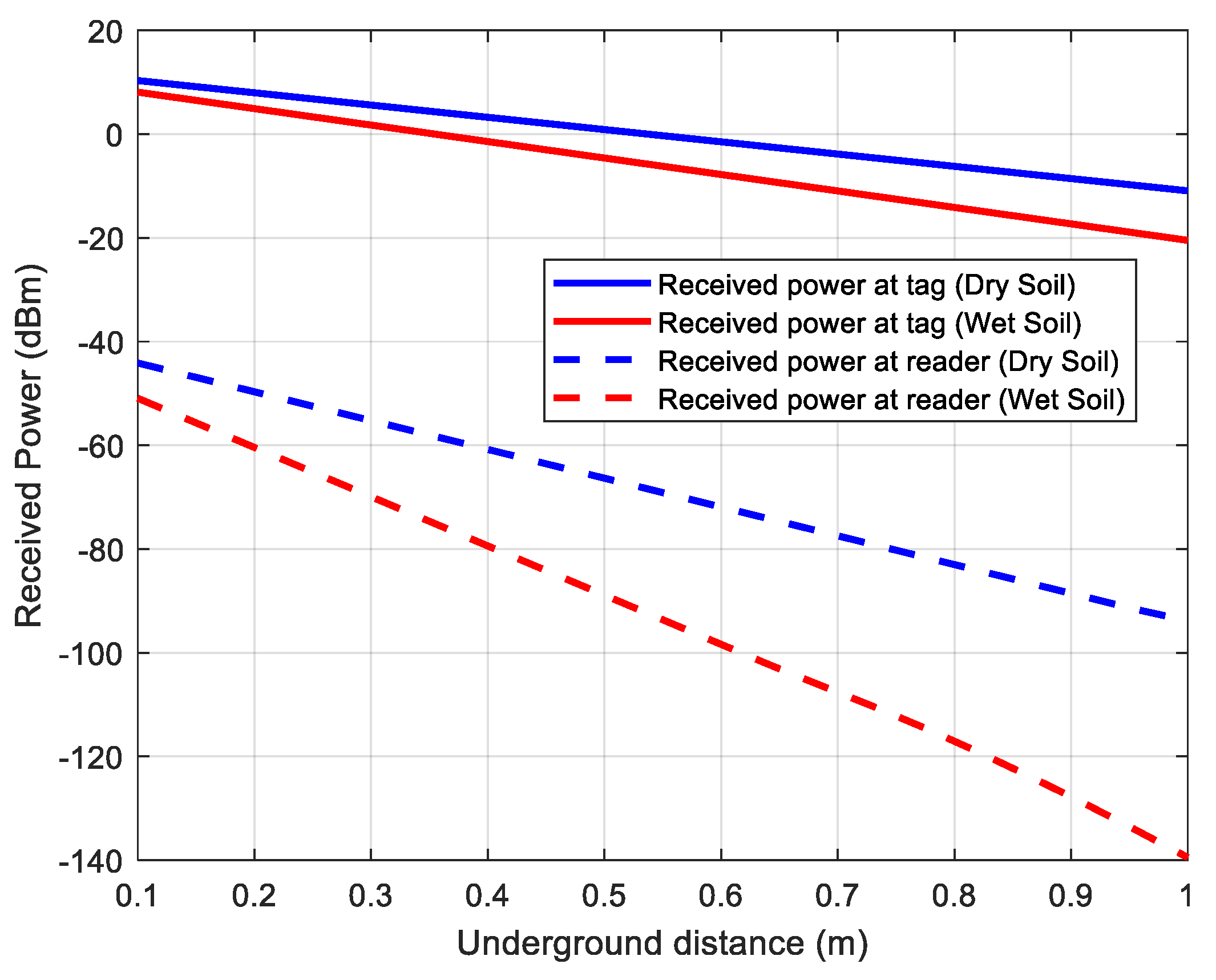
3.2. Link Budget
3.3. Tag Read Range
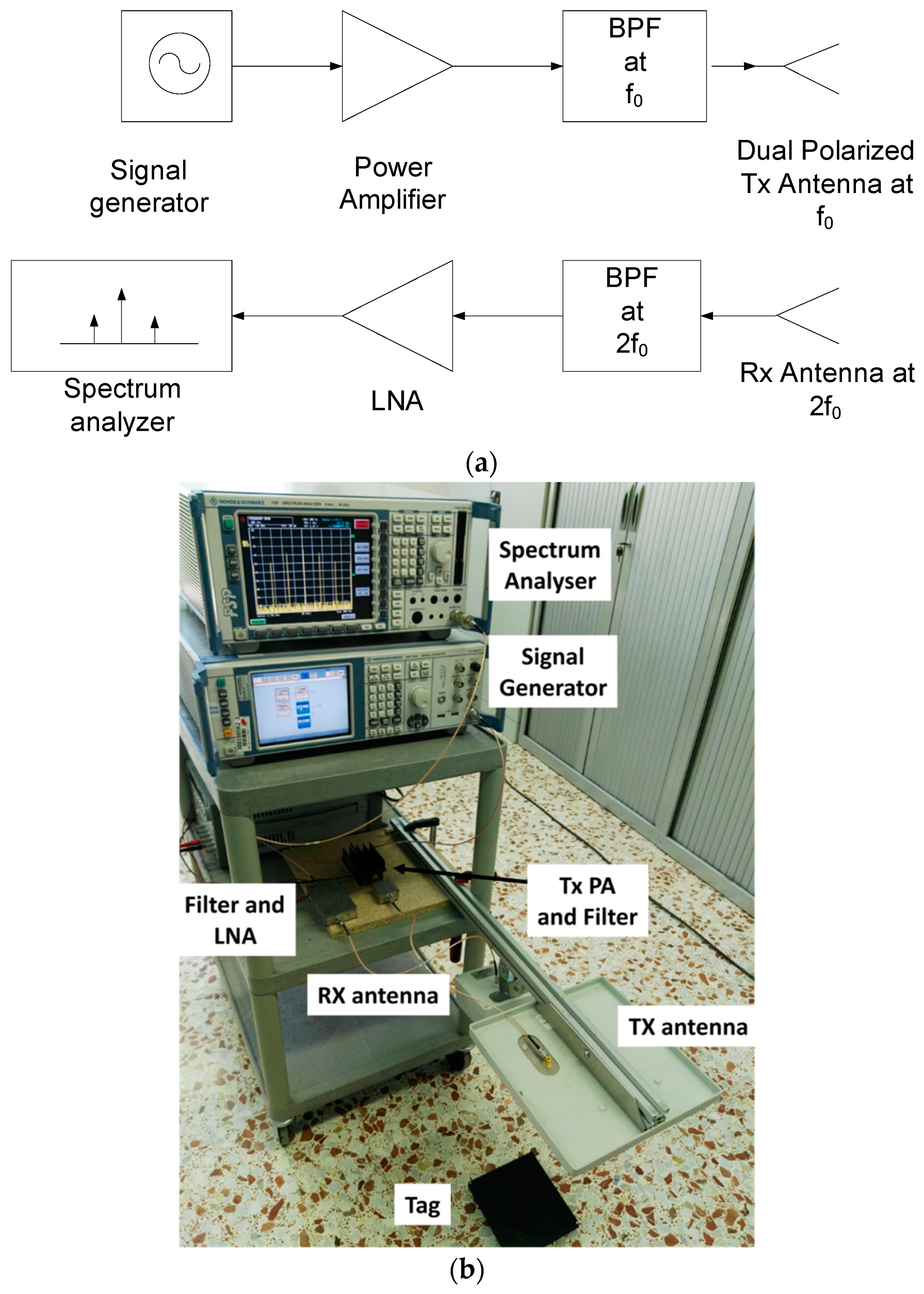
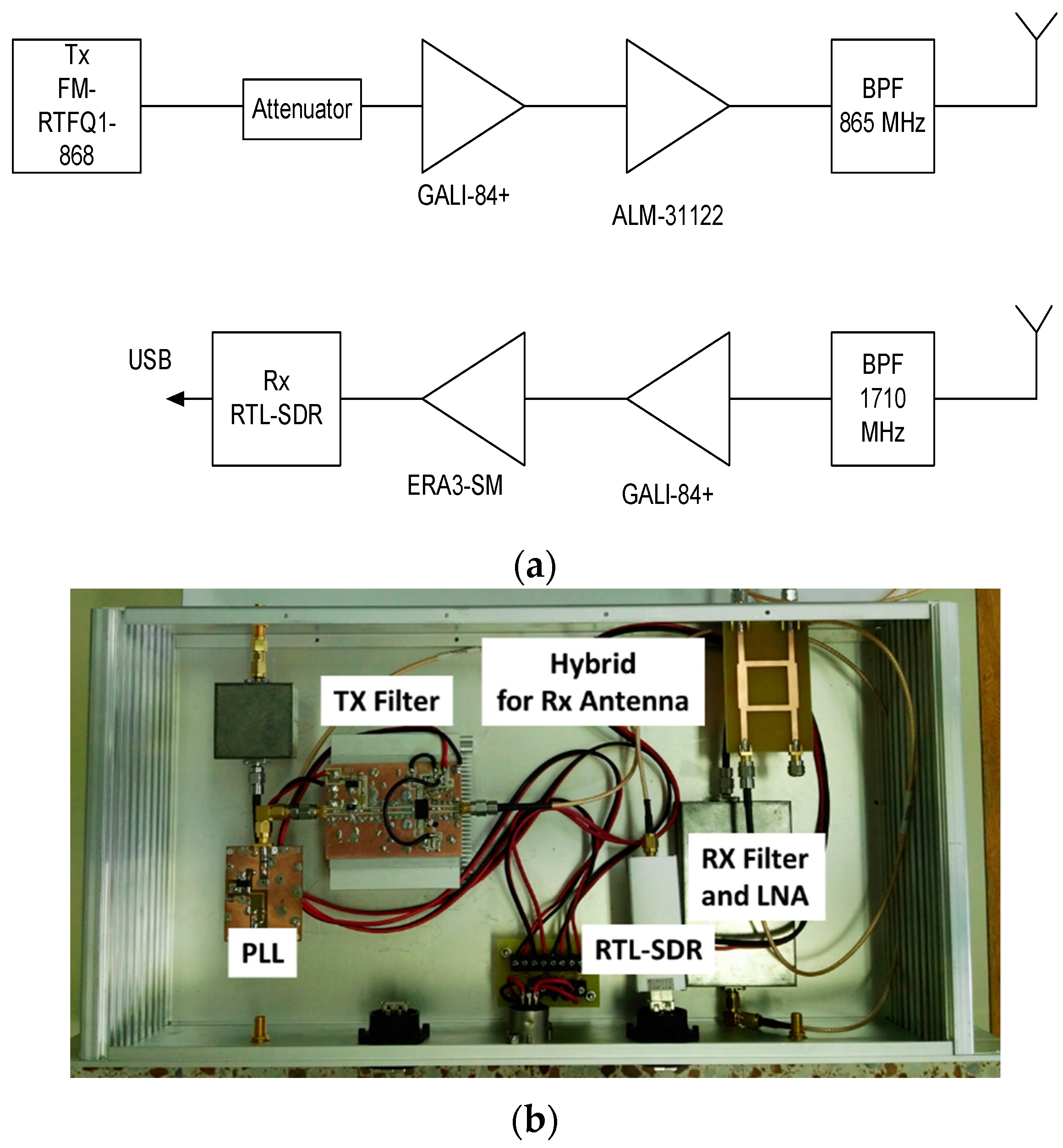
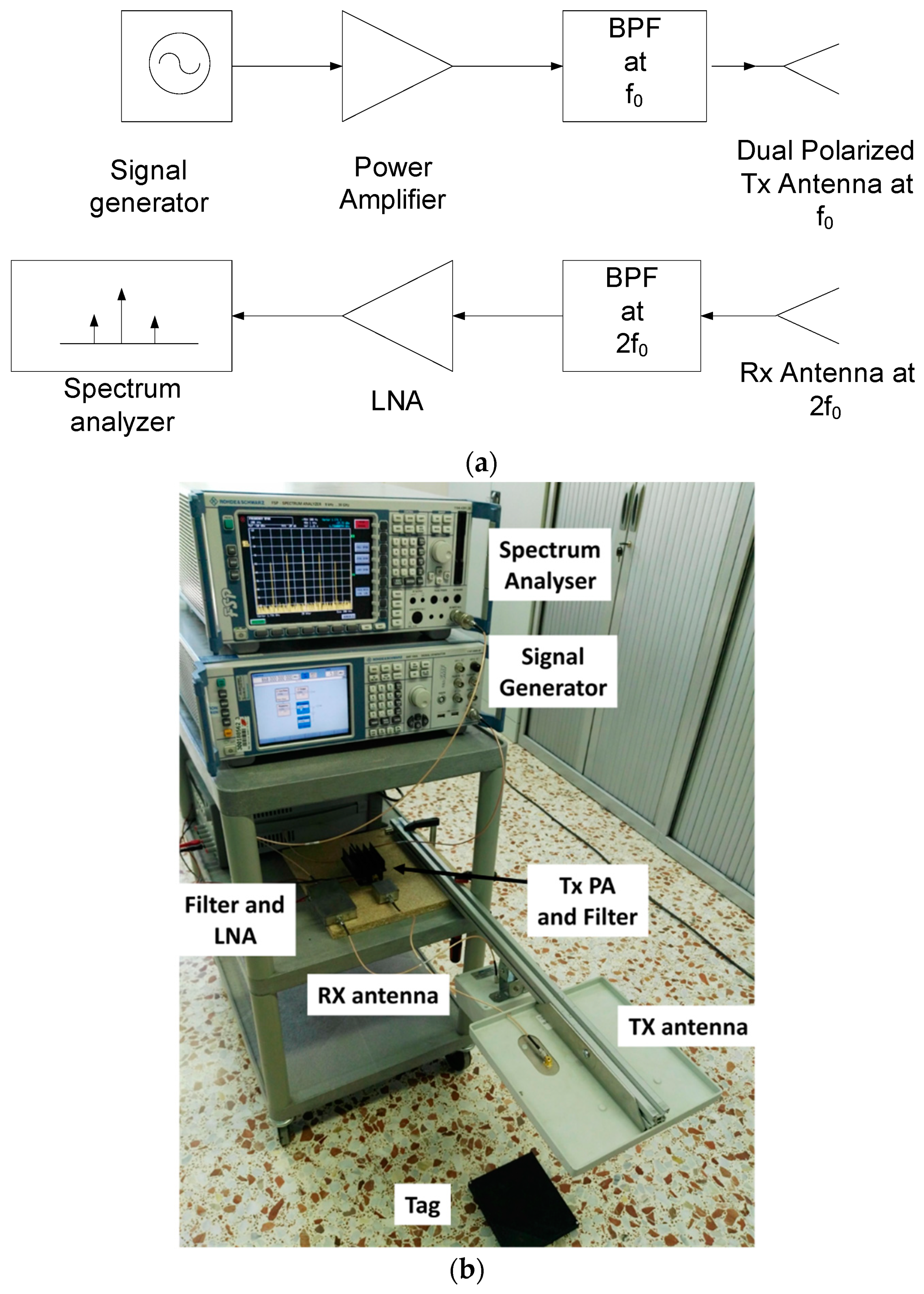
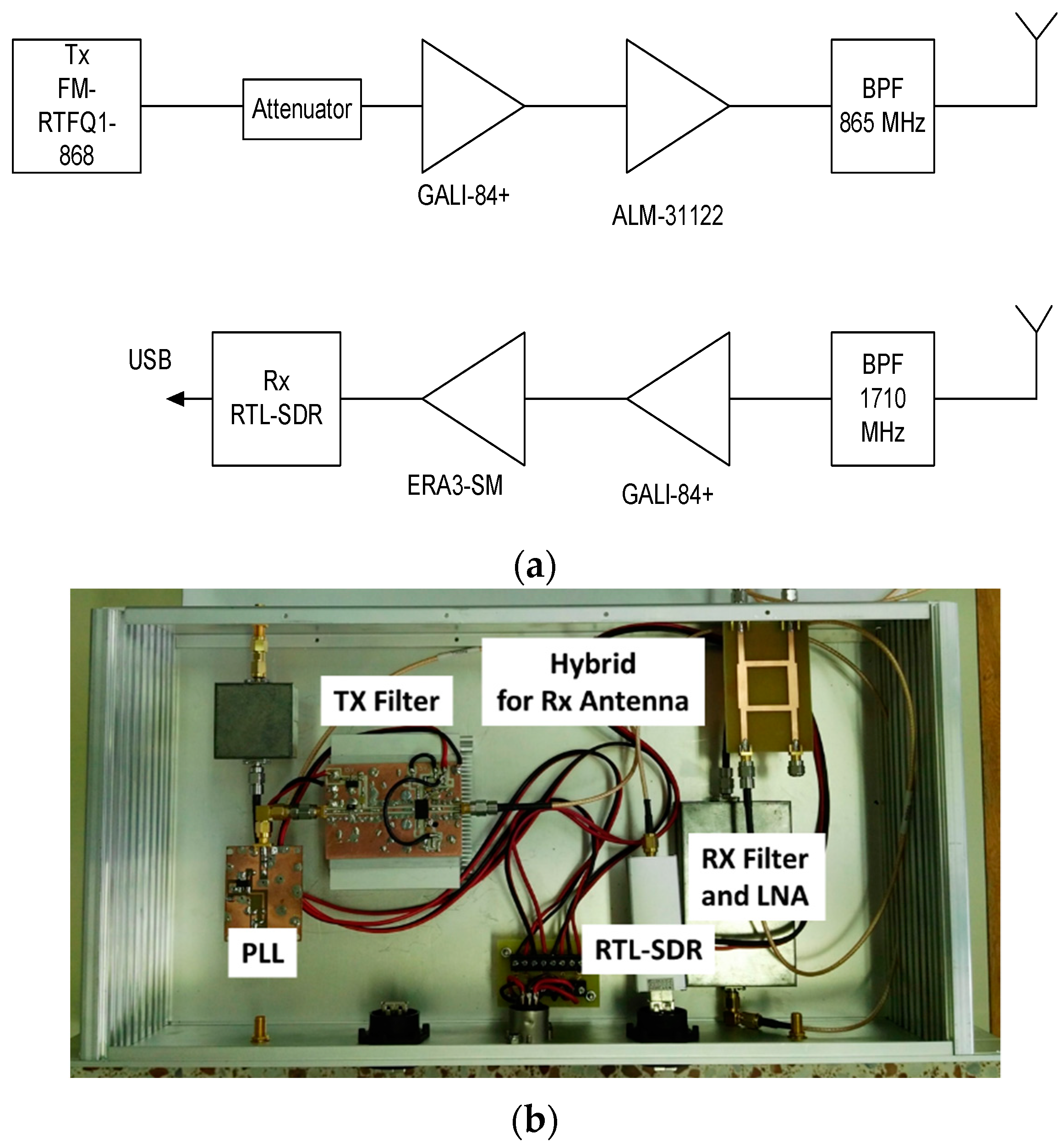
4. Low-Cost Harmonic Reader
5. Discussion
6. Conclusions
Author Contributions
Funding
Conflicts of Interest
References
- Costello, S.B.; Chapman, D.N.; Rogers, C.D.F.; Metje, N. Underground asset location and condition assessment technologies. Tunn. Undergr. Space Technol. 2007, 22, 524–542. [Google Scholar] [CrossRef]
- Sun, Z.; Wang, P.; Vuran, M.C.; Al-Rodhaan, M.A.; Al-Dhelaan, A.M.; Akyildiz, I.F. MISE-PIPE: Magnetic induction-based wireless sensor networks for underground pipeline monitoring. Ad Hoc Netw. 2011, 9, 218–227. [Google Scholar] [CrossRef]
- Nestleroth, J.B.; Richard, J.D. Application of eddy currents induced by permanent magnets for pipeline inspection. NDT E Int. 2007, 40, 77–84. [Google Scholar] [CrossRef]
- Daniels, D.J. Ground Penetrating Radar, Encyclopedia of RF and Microwave Engineering; John Wiley & Sons, Inc.: Hoboken, NJ, USA, 2005; Volume 2. [Google Scholar]
- Hao, T.; Burd, H.J.; Edwards, D.J.; Stevens, C.J. Enhanced detection of buried assets. In Proceedings of the Loughborough Antennas and Propagation Conference, Loughborough, UK, 17–18 March 2008; pp. 249–252. [Google Scholar]
- Tsiropoulou, E.E.; Baras, J.S.; Papavassiliou, S.; Sinha, S. RFID-based smart parking management system. Cyber-Phys. Syst. 2017, 3, 22–41. [Google Scholar] [CrossRef]
- Renuka, N.; Nan, N.C.; Ismail, W. Embedded RFID tracking system for hospital application using WSN platform. In Proceedings of the IEEE International Conference on RFID-Technologies and Applications (RFID-TA), Johor Bahru, Malaysia, 4–5 September 2013; pp. 1–5. [Google Scholar]
- Zhi-yuan, Z.; He, R.; Jie, T. A method for optimizing the position of passive UHF RFID tags. In Proceedings of the IEEE International Conference on International Conference on RFID-Technology and Applications (RFID-TA), Guangzhou, China, 17–19 June 2010; pp. 92–95. [Google Scholar]
- Tsiropoulou, E.E.; Baras, J.S.; Papavassiliou, S.; Qu, G. On the Mitigation of Interference Imposed by Intruders in Passive RFID Networks. In Proceedings of the 7th International Conference on Decision and Game Theory for Security, New York, NY, USA, 2–4 November 2016; pp. 62–80. [Google Scholar]
- Ferro, V.; Luz, A.; Lucrecio, A. Small long range UHF TAG for metal applications. In Proceedings of the IEEE International Conference on RFID-Technologies and Applications (RFID-TA), Johor Bahru, Malaysia, 4–5 September 2013; pp. 1–6. [Google Scholar]
- Bjorninen, T.; Sydanheimo, L.; Ukkonen, L.; Rahmat-Samii, Y. Advances in antenna designs for UHF RFID tags mountable on conductive items. IEEE Antennas Propag. Mag. 2014, 56, 79–103. [Google Scholar] [CrossRef]
- López-Soriano, S.; Parrón, J. Small UHF RFID tag antenna for metallic objects. In Proceedings of the 9th European Conference on Antennas and Propagation (EuCAP), Lisbon, Portugal, 13–17 April 2015; pp. 1–5. [Google Scholar]
- Shubert, K.A.; Davis, R.J.; Barnum, T.J.; Balaban, B.D. RFID tags to aid detection of buried unexploded ordnance. IEEE Antennas Propag. Mag. 2008, 50, 13–24. [Google Scholar] [CrossRef] [Green Version]
- Lucianaz, C.; Greco, G.; Bertoldo, S.; Allegretti, M. Real time outdoor localization of buried RFID tags through statistical methods. In Proceedings of the International Conference on Electromagnetics in Advanced Applications (ICEAA), Turin, Italy, 7–11 September 2015; pp. 1152–1154. [Google Scholar]
- Nasir, A.; Soong, B.K.; Qaraqe, K.A. RFID in-pipe moisture sensing system for oil and gas quality monitoring in Qatar. In Proceedings of the 19th IEEE International Conference on Networks (ICON), Singapore, 11–13 December 2013; pp. 1–5. [Google Scholar]
- Stoianov, I.; Nachman, L.; Madden, S.; Tokmouline, T. PIPENET: A Wireless Sensor Network for Pipeline Monitoring. In Proceedings of the 6th International Symposium on Information Processing in Sensor Networks, Cambridge, MA, USA, 25–27 April 2007; pp. 264–273. [Google Scholar]
- Allen, C.T.; Shi, K.; Plumb, R.G. The use of ground-penetrating radar with a cooperative target. IEEE Trans. Geosci. Remote. Sens. 1998, 36, 1821–1825. [Google Scholar] [CrossRef] [Green Version]
- Trewitt, J.; Hawrylak, P.; Keller, M. Time delay tags for commercial ground penetrating radars. In Proceedings of the IEEE Radar Conference (RadarConf18), Oklahoma City, OK, USA, 23–27 April 2018; pp. 1466–1471. [Google Scholar]
- Zhang, W.Y.; Chang, Y.; Hao, T. Design of RF tags attaching to buried pipes for enhanced detection by GPR. In Proceedings of the 16th International Conference on Ground Penetrating Radar (GPR), Hong Kong, China, 13–16 June 2016; pp. 1–5. [Google Scholar]
- 3M Locating and Marking. Available online: http://solutions.3m.com/wps/portal/3M/en_US/Locating-Marking-NA/Home/Product-Catalog/~/Detection-Marking?N=5726&rt=c2 (accessed on 5 September 2018).
- Burd, H.J.; Stevens, C.J.; Edwards, D.J.; Hao, T. Wireless Backscatter Interrogation of Passive, Resonant Sensor-LC-Tags. U.S. Patent 12/867,682, 23 December 2010. [Google Scholar]
- Finkenzeller, K. RFID Handbook, 2nd ed.; John Wiley & Sons, Inc.: New York, NY, USA, 2003; ISBN 0470695064. [Google Scholar]
- Hautcoeur, J.; Talbi, L.; Nedil, M. High gain RFID tag antenna for the underground localization applications at 915 MHz band. In Proceedings of the IEEE Antennas and Propagation Society International Symposium (APSURSI), Orlando, FL, USA, 7–13 July 2013; pp. 1488–1489. [Google Scholar]
- Chang, A.Y.; Yu, C.; Lin, S.; Chang, Y.; Ho, P. Search, Identification and Positioning of the Underground Manhole with RFID Ground Tag. In Proceedings of the Fifth International Joint Conference on INC, IMS and IDC, Seoul, Korea, 25–27 August 2009; pp. 1899–1903. [Google Scholar]
- Park, Y.; Kim, H. Tagging cities? Reading RFID tags from inside brick and mortar. In Proceedings of the 10th ACM Conference on Embedded Network Sensor Systems, Toronto, ON, Canada, 6–9 November 2012. [Google Scholar]
- Roselli, L.; Carvalho, N.B.; Alimenti, F.; Mezzanotte, P.; Orecchini, G.; Virili, M.; Pinho, P. Smart surfaces: Large area electronics systems for Internet of Things enabled by energy harvesting. Proc. IEEE 2014, 102, 1723–1746. [Google Scholar] [CrossRef]
- Ramos, A.; Lazaro, A.; Villarino, R.; Girbau, D. Time-domain UWB RFID tags for smart floor applications. In Proceedings of the IEEE RFID Technology and Applications Conference (RFID-TA), Tampere, Finland, 8–9 September 2014; pp. 165–169. [Google Scholar]
- Gonalves, R.; Reis, J.; Santana, E.; Carvalho, N.B.; Pinho, P.; Roselli, L. Smart floor: Indoor navigation based on RFID. In Proceedings of the IEEE Wireless Power Transfer (WPT), Perugia, Italy, 15–16 May 2013; pp. 103–106. [Google Scholar]
- Park, S.; Lee, H. Self-Recognition of Vehicle Position Using UHF Passive RFID Tags. IEEE Trans. Ind. Electron. 2013, 60, 226–234. [Google Scholar] [CrossRef]
- Pursula, P.; Kiviranta, M.; Seppä, H. UHF RFID Reader with Reflected Power Canceller. IEEE Microw. Wirel. Compon. Lett. 2009, 19, 48–50. [Google Scholar] [CrossRef]
- Jung, S.-C.; Kim, M.-S.; Yang, Y. A Reconfigurable Carrier Leakage Canceler for UHF RFID Reader Front-Ends. IEEE Trans. Circuits Syst. I Regul. Pap. 2011, 58, 70–76. [Google Scholar] [CrossRef]
- Colpitts, B.G.; Boiteau, G. Harmonic radar transceiver design: Miniature tags for insect tracking. IEEE Trans. Antennas Propag. 2004, 52, 2825–2832. [Google Scholar] [CrossRef]
- Rasilainen, K.; Ilvonen, J.; Lehtovuori, A.; Hannula, J.M.; Viikari, V. On Design and Evaluation of Harmonic Transponders. IEEE Trans. Antennas Propag. 2015, 63, 15–23. [Google Scholar] [CrossRef]
- Kimmo, R.; Viikari, V. Transponder Designs for Harmonic Radar Applications. Int. J. Antennas Propag. 2015. [Google Scholar] [CrossRef]
- RECCO Rescue System, a System for Locating Avalanche Victims, Recco AB, Liding, Sweden. Available online: http://www.recco.com/about (accessed on 5 September 2018).
- Alimenti, F.; Roselli, L. Theory of Zero-Power RFID Sensors Based on Harmonic Generation and Orthogonally Polarized Antennas. Prog. Electromagn. Res. 2013, 134, 337–357. [Google Scholar] [CrossRef]
- Kubina, B.; Romeu, J.; Mandel, C.; Schußler, M.; Jakoby, R. Quasi-chipless wireless temperature sensor based on harmonic radar. Electron. Lett. 2014, 50, 86–88. [Google Scholar] [CrossRef]
- Lazaro, A.; Villarino, R.; Girbau, D. A passive harmonic tag for humidity sensing. Int. J. Antennas Propag. 2014. [Google Scholar] [CrossRef]
- Nikitin, P.; Rao, K. Harmonic scattering from passive UHF RFID tags. In Proceedings of the IEEE Antennas and Propagation Society International Symposium, (APSURSI ’09), Charleston, SC, USA, 1–5 June 2009; pp. 1–4. [Google Scholar]
- Vera, G.A.; Duroc, Y.; Tedjini, S. Redundant backscattering modulation of passive UHF RFID tags. In Proceedings of the IEEE MTT-S International Microwave Symposium Digest, Seattle, WA, USA, 2–7 June 2013. [Google Scholar]
- Vera, G.A.; Duroc, Y.; Tedjini, S. Analysis of Harmonics in UHF RFID Signals. IEEE Trans. Microw. Theory Tech. 2013, 61, 2481–2490. [Google Scholar] [CrossRef]
- Ghazali, M.I.M.; Karuppuswami, S.; Chahal, P. Embedded Passive RF Tags towards Intrinsically Locatable Buried Plastic Materials. In Proceedings of the IEEE 66th Electronic Components and Technology Conference (ECTC), Las Vegas, NV, USA, 31 May–3 June 2016; pp. 2575–2580. [Google Scholar]
- Mondal, S.; Kumar, D.; Ghazali, M.I.; Chahal, P.; Udpa, L.; Deng, Y. Monitoring and localization of buried plastic natural gas pipes using passive RF tags. In Proceedings of the AIP Conference, Provo, UT, USA, 16–21 July 2017; AIP Publishing: Newark, DE, USA, 2018; Volume 1949, p. 020020. [Google Scholar]
- Ma, Y.; Hui, X.; Kan, E.C. Harmonic-WISP: A passive broadband harmonic RFID platform. In Proceedings of the IEEE MTT-S International Microwave Symposium (IMS), San Francisco, CA, USA, 22–27 May 2016. [Google Scholar]
- Pozar, D.M.; Kaufman, B. Increasing the bandwidth of a microstrip antenna by proximity coupling. Electron. Lett. 1987, 23, 368–369. [Google Scholar] [CrossRef]
- Peplinski, N.R.; Ulaby, F.T.; Dobson, M.C. Dielectric properties of soils in the 0.3–1.3-GHz range. IEEE Trans. Geosci. Remote. Sens. 1995, 33, 803–807. [Google Scholar] [CrossRef]
- Peplinski, N.R.; Ulaby, F.T.; Dobson, M.C. Corrections to “Dielectric Properties of Soils in the 0.3–1.3-GHz Range”. IEEE Trans. Geosci. Remote. Sens. 1995, 33, 1340. [Google Scholar] [CrossRef]
- Dichtl, C.; Sippel, P.; Krohns, S. Dielectric Properties of 3D Printed Polylactic Acid. Adv. Mater. Sci. Eng. 2017. [Google Scholar] [CrossRef]
- Nikitin, P.V.; Rao, K.V.S. Antennas and Propagation in UHF RFID Systems. In Proceedings of the IEEE International Conference on RFID, Las Vegas, NV, USA, 16–17 April 2008; pp. 277–288. [Google Scholar]
- Lazaro, A.; Girbau, D.; Salinas, D. Radio Link Budgets for UHF RFID on Multipath Environments. IEEE Trans. Antennas Propag. 2009, 57, 1241–1251. [Google Scholar] [CrossRef]
- Zhao, X.; Shi, R.; Yang, Y.; Qin, P.; Ma, Y.; Wen, Y.; Han, T. SAW RFID with enhanced penetration depth. In Proceedings of the 2017 IEEE International Ultrasonics Symposium (IUS), Washington, DC, USA, 6–9 September 2017; pp. 1–4. [Google Scholar]
- Wilson, D.W.; Sbatella, G.M.; Wang, Q.; Miller, S.D. Suitability of passive integrated transponder (PIT) tags for tracking weed seed movement in soils. Weed Technol. 2010, 24, 386–391. [Google Scholar] [CrossRef]
- Xiangkai, G.; Shuqin, G.; Xin, Z.; Xiaohong, P.; Ligang, H. Design and realization of underground pipeline location system based on RFID technology. In Proceedings of the 13th IEEE International Conference on Electronic Measurement & Instruments (ICEMI), Yangzhou, China, 20–22 October 2017; pp. 242–246. [Google Scholar]












{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Parameter | Value | Unit |
|---|---|---|
| Transmitter EIRP | 2 | W |
| Frequency f0 | 865 | MHz |
| Tag antenna gain, Gtag at f0 | 6 | dB |
| Tag antenna gain, Gtag, 2 at 2f0 | 6 | dB |
| Reader antenna gain, GR | 6 | dB |
| Volumetric water content VWC for the wet soil | 30 | % |
| Distance to ground, dg | 10 | cm |
| Parameter | Cost ($) |
|---|---|
| RTL–SDR | 20 |
| Reader Antennas | 100 |
| Filters | 10 |
| Amplifiers | 10 |
| Power Supply | 20 |
| Connectors and box | 20 |
| Trolley | 50 |
| Tag | 4 |
| Reference | Technique | Deep Underground | Comments |
|---|---|---|---|
| [5] | GPR (time domain) | 0.6 m | Detection of pipes using tag resonators with GPR (GSSI model) at 900 MHz with tag resonators. |
| [17] | GPR (time domain) | 1.1 | Detection of a dipole antenna with a delay line buried using GPR (Sensors model) operating at a center frequency of 900 MHz in a dry sand. |
| [18] | GPR (time domain) | 1.2 | Detection of FAT dipoles with delay lines at 900 MHz with VNA in dry soil. |
| [19] | GPR (time domain) | 0.45 m | Detection of resonant tags with GPR (GEOTCH OKO-3 model) at 700 MHz in dry sand |
| [51] | SAW RFID 915 MHz | 1.3 m | SAW RFID at 443 MHz and 915 MHz in dry soil transmitting 30 dBm. |
| [20] | LF RFID | 1.5 m | Electronic marking system (EMS) by 3M. |
| [52] | LF RFID (134.2 kHz) | 0.24 m | Passive integrated transponder (PIT) for tracking soil movements. |
| [53] | LF RFID (135 kHz) | NA | Underground pipeline location. |
| [28] | HF RFID | 8 mm | Smart floor application with standard 13.56 MHz tags under the tiles. |
| [24] | UHF RFID | 10 cm | UHF RFID metal tags are used for manhole detection. |
| [29] | UHF RFID | 10 cm | Metal UHF tags embedded in bricks and mortar. |
| [27] | IR UWB radar | 1 cm | Detection of metallic reflectors under the floor for smart floor application with UWB radar. |
| [42] | Harmonic tag at 2.4 GHz | 3 cm | Harmonic tag with a reader transmitting 7 dBm. |
| [43] | Harmonic tag at 400 MHz | NA | Experimental results in free space up to 0.76 m at 400 MHz using a varactor based harmonic tag. |
| [17] | Harmonic tag at 150 MHz | NA | Harmonic tag at 150 MHz (preliminary experiments in free space). |
| This work | Harmonic UHF | 30–60 cm | Harmonic tag with harvester and modulator. |
| [14] | Active tag at 315 MHz | NA | 500 mW transmitter under the ice. |
© 2018 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Abdelnour, A.; Lazaro, A.; Villarino, R.; Kaddour, D.; Tedjini, S.; Girbau, D. Passive Harmonic RFID System for Buried Assets Localization. Sensors 2018, 18, 3635. https://doi.org/10.3390/s18113635
Abdelnour A, Lazaro A, Villarino R, Kaddour D, Tedjini S, Girbau D. Passive Harmonic RFID System for Buried Assets Localization. Sensors. 2018; 18(11):3635. https://doi.org/10.3390/s18113635
Chicago/Turabian StyleAbdelnour, Abanob, Antonio Lazaro, Ramón Villarino, Darine Kaddour, Smail Tedjini, and David Girbau. 2018. "Passive Harmonic RFID System for Buried Assets Localization" Sensors 18, no. 11: 3635. https://doi.org/10.3390/s18113635
APA StyleAbdelnour, A., Lazaro, A., Villarino, R., Kaddour, D., Tedjini, S., & Girbau, D. (2018). Passive Harmonic RFID System for Buried Assets Localization. Sensors, 18(11), 3635. https://doi.org/10.3390/s18113635