Acknowledgments
This project acknowledges the efforts to acquire, process, and analyze airborne Lidar bathymetry and aerial imagery of the Frio River, Texas, for research purposes. The Texas Department of Transportation (TxDOT) carried out the airborne flight services, and researchers conducted the study in the spring of 2018. The authors would like to thank those who contributed and provided feedback, especially Jeff Paine, Michael Young, Tiffany Caudle and the anonymous reviewers. Our gratitude extends to Leica AHAB staff members of Sweden and Canada as well. The Bureau staff member Stephanie Jones revised and edited the manuscript for language quality. Publication authorized by the Bureau Director, Scott Tinker.
Figure 1.
Custom-built Leica AHAB Chiroptera.
Figure 1.
Custom-built Leica AHAB Chiroptera.
Figure 2.
AHAB Chiroptera was installed in a Texas Department of Transportation (TxDOT) owned and operated Cessna 206 aircraft.
Figure 2.
AHAB Chiroptera was installed in a Texas Department of Transportation (TxDOT) owned and operated Cessna 206 aircraft.
Figure 3.
Frio River study area. Basins are in sequence from one to fifteen, north to south.
Figure 3.
Frio River study area. Basins are in sequence from one to fifteen, north to south.
Figure 4.
Frio River and its scenic environment, surrounded by overhanging trees along the riparian zone.
Figure 4.
Frio River and its scenic environment, surrounded by overhanging trees along the riparian zone.
Figure 5.
Diverse submerged assemblage, which creates challenges for Lidar and sonar measurements.
Figure 5.
Diverse submerged assemblage, which creates challenges for Lidar and sonar measurements.
Figure 6.
Kayak with sonar equipment.
Figure 6.
Kayak with sonar equipment.
Figure 7.
Calm and shallow waters of the Frio River.
Figure 7.
Calm and shallow waters of the Frio River.
Figure 8.
Sonar measurements in the Frio River survey. Basin #15 is deepest with a mean depth of 1.58 m and basin #12 is shallowest at 0.91 m.
Figure 8.
Sonar measurements in the Frio River survey. Basin #15 is deepest with a mean depth of 1.58 m and basin #12 is shallowest at 0.91 m.
Figure 9.
Freshwater Secchi disk.
Figure 9.
Freshwater Secchi disk.
Figure 10.
Hach 2100Q field turbidimeter.
Figure 10.
Hach 2100Q field turbidimeter.
Figure 11.
Slant-range adjustment of Chiroptera scanners; control points versus Lidar-derived patch elevation-lagged residuals. Residuals do not indicate any underlying patterns, but only a few outlier measurements.
Figure 11.
Slant-range adjustment of Chiroptera scanners; control points versus Lidar-derived patch elevation-lagged residuals. Residuals do not indicate any underlying patterns, but only a few outlier measurements.
Figure 12.
Garner State Park area, Texas, surface and elevation models of the Frio River and its surroundings.
Figure 12.
Garner State Park area, Texas, surface and elevation models of the Frio River and its surroundings.
Figure 13.
Distribution of GPS measured water-bottom elevations to Lidar-derived elevations.
Figure 13.
Distribution of GPS measured water-bottom elevations to Lidar-derived elevations.
Figure 14.
Distribution of water-surface elevation to Lidar-derived surface returns.
Figure 14.
Distribution of water-surface elevation to Lidar-derived surface returns.
Figure 15.
Averaged waveforms at sampling locations 1 and 12. Surface peak is weak, and bottom backscatter is strong, indicating shallow and transparent water columns.
Figure 15.
Averaged waveforms at sampling locations 1 and 12. Surface peak is weak, and bottom backscatter is strong, indicating shallow and transparent water columns.
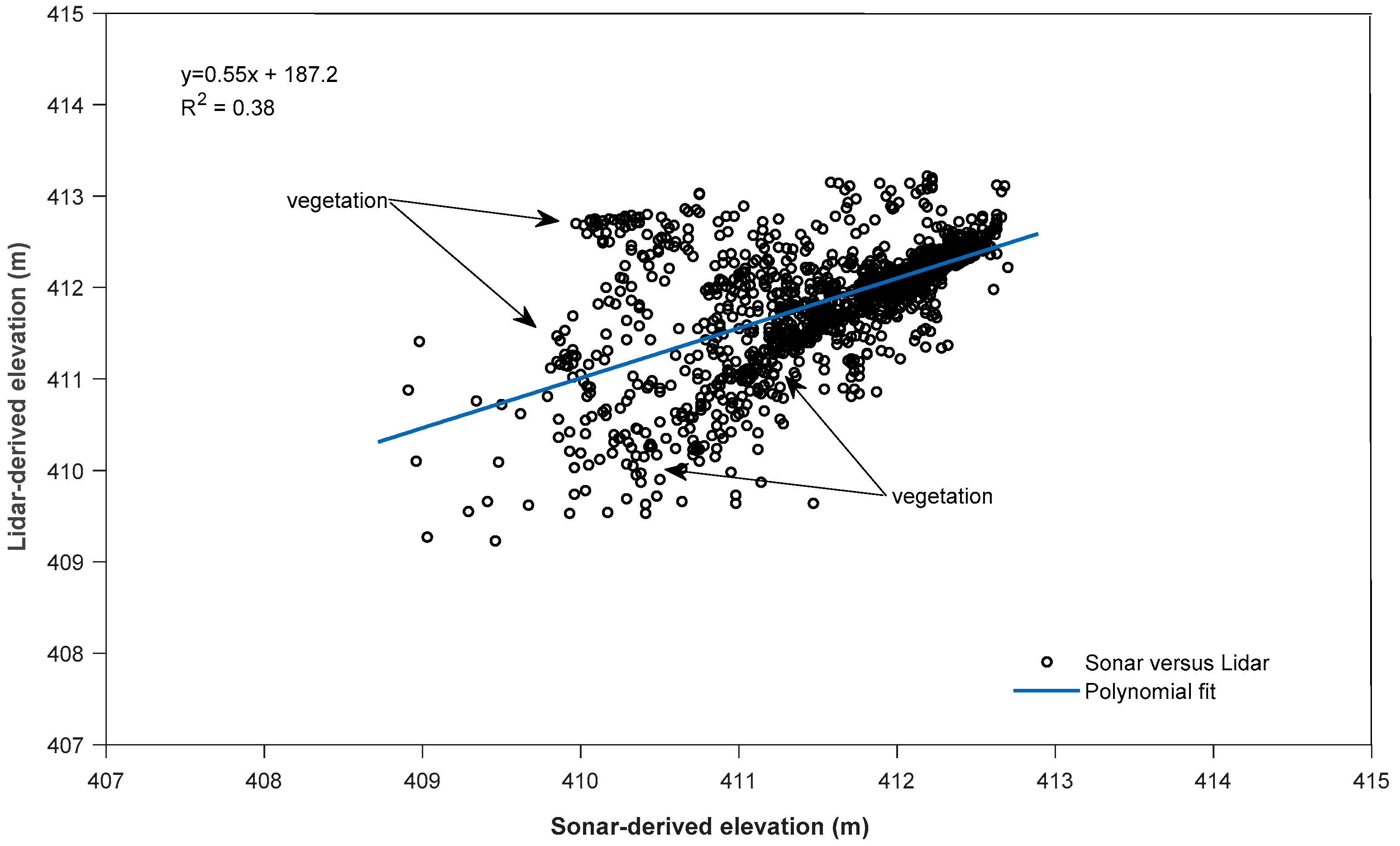
Figure 16.
Basin 9 Lidar-derived elevation versus sonar-derived elevation—densely submerged vegetation in deeper areas.
Figure 16.
Basin 9 Lidar-derived elevation versus sonar-derived elevation—densely submerged vegetation in deeper areas.
Figure 17.
Basin 8 Lidar-derived elevation versus sonar-derived elevation—moderate amounts of submerged vegetation in water column.
Figure 17.
Basin 8 Lidar-derived elevation versus sonar-derived elevation—moderate amounts of submerged vegetation in water column.
Table 1.
CORS stations TXUV and TXLE, and positional accuracies as reported in 2018.
Table 1.
CORS stations TXUV and TXLE, and positional accuracies as reported in 2018.
| Reference Station | Latitude | Longitude | Ellipsoidal Height (H, m) | Mean Accuracy (N, cm) | Mean Accuracy (E, cm) | Mean Accuracy (Z, cm) |
|---|
| TXUV | 29°12′ 01.86729 | 99°49′ 37.57853 | 262.570 | 0.07 | 0.04 | 0.84 |
| TXLE | 29°44′ 21.58283 | 99°45′ 40.5039 | 478.402 | 1.57 | −0.01 | −0.41 |
Table 2.
Vertical-bias adjustment results after Chiroptera system calibration.
Table 2.
Vertical-bias adjustment results after Chiroptera system calibration.
| Lidar Scanner | Number of Samples | Sample Range (m) | Median (m) | RMSE (m) | Adjusted R2 |
|---|
| NIR | 174 | 0.13 | 0.004 | 0.026 | 0.998 |
| Green-wavelength | 174 | 0.16 | 0.016 | 0.026 | 0.999 |
Table 3.
GPS post-processing quality-control findings (vertical adjustment).
Table 3.
GPS post-processing quality-control findings (vertical adjustment).
| Measurement | Number of Samples | Sample Range (m) | Median (m) | SD (m) |
|---|
| Water-surface | 28 | 0.11 | 0.04 | 0.02 |
| Water-bottom | 40 | 0.08 | 0.05 | 0.01 |
Table 4.
Comparison of water-bottom measurements to Lidar-derived elevations (dZ = hL − hg).
Table 4.
Comparison of water-bottom measurements to Lidar-derived elevations (dZ = hL − hg).
| Basin | Number of Samples | Mean Lidar-Derived Basin Depth (m) | Mean Difference (m) | RMSE (m) | Adjusted R2 |
|---|
| 2 | 14 | 0.99 | −0.01 | 0.066 | 0.958 |
| 3 | 11 | 1.02 | −0.01 | 0.063 | 0.967 |
| 9 | 8 | 0.72 | −0.03 | 0.055 | 0.915 |
| 12 | 7 | 1.36 | −0.01 | 0.125 | 0.878 |
Table 5.
Water-surface measurement comparison to Lidar-derived surface returns (dZ = hL − hg).
Table 5.
Water-surface measurement comparison to Lidar-derived surface returns (dZ = hL − hg).
| Basin | Number of Samples | Sample Range (m) | Mean Difference (m) | SD (m) | RMSE (m) |
|---|
| 2 | 8 | 0.06 | −0.09 | 0.02 | 0.02 |
| 8 | 6 | 0.12 | −0.03 | 0.02 | 0.02 |
| 9 | 2 | 0.16 | −0.10 | 0.04 | N/A |
| 12 | 4 | 0.07 | −0.01 | 0.04 | 0.05 |
| 15 | 8 | 0.15 | −0.04 | 0.06 | 0.03 |
Table 6.
Turbidity and depth measurements at selected locations in the Frio River.
Table 6.
Turbidity and depth measurements at selected locations in the Frio River.
| Sample | Basin | Location (Latitude, Longitude) | NTU (Median) | SD (m) | Sonar Depth (m) |
|---|
| 1 | 2 | 29.724465, −99.749098 | 0.42 | 0.02 | 1.40 |
| 2 | 3 | 29.708657, −99.756977 | 0.66 | 0.15 | 1.38 |
| 3 | 3 | 29.706622, −99.755463 | 0.43 | 0.02 | 2.09 |
| 4 | 12 | 29.542181, −99.714676 | 0.44 | 0.03 | 1.73 |
| 5 | 12 | 29.538870, −99.713520 | 0.48 | 0.05 | 1.35 |
| 6 | 15 | 29.488645, −99.706318 | 0.59 | 0.03 | 2.06 |
| 7 | 15 | 29.488227, −99.702751 | 0.57 | 0.12 | 2.63 |
| 8 | 15 | 29.485601, −99.698762 | 0.76 | 0.04 | 1.78 |
| 9 | 8 | 29.583176, −99.729285 | 0.55 | 0.04 | 2.10 |
| 10 | 8 | 29.579488, −99.730900 | 0.46 | 0.06 | 1.11 |
| 11 | 9 | 29.576960, −99.728415 | 0.58 | 0.16 | 3.2 |
| 12 | 9 | 29.576916, −99.727918 | 0.39 | 0.03 | 1.9 |
Table 7.
Sonar-reading correlation results for Lidar-derived patch elevations at water-bottom.
Table 7.
Sonar-reading correlation results for Lidar-derived patch elevations at water-bottom.
| Basin | Number of Samples | Sample Range (m) | Mean (m) | RMSE (m) | Adjusted R2 |
|---|
| 3 | 1843 | 2.07 | 0.16 | 0.2 | 0.812 |
| 8 | 1584 | 1.6 | 0.04 | 0.2 | 0.832 |
| 9 | 1840 | 4.56 | 0.23 | 0.48 | 0.382 |
| 12 | 2156 | 1.93 | 0.06 | 0.23 | 0.681 |
| 13 | 176 | 1.26 | 0.08 | 0.2 | 0.63 |
| 14 | 522 | 2.55 | 0.18 | 0.34 | 0.912 |
| 15 | 2479 | 3.04 | 0.16 | 0.33 | 0.786 |

 ,
, 


















{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}