An Energy-Efficient and Obstacle-Avoiding Routing Protocol for Underwater Acoustic Sensor Networks


Abstract
:1. Introduction
- (1)
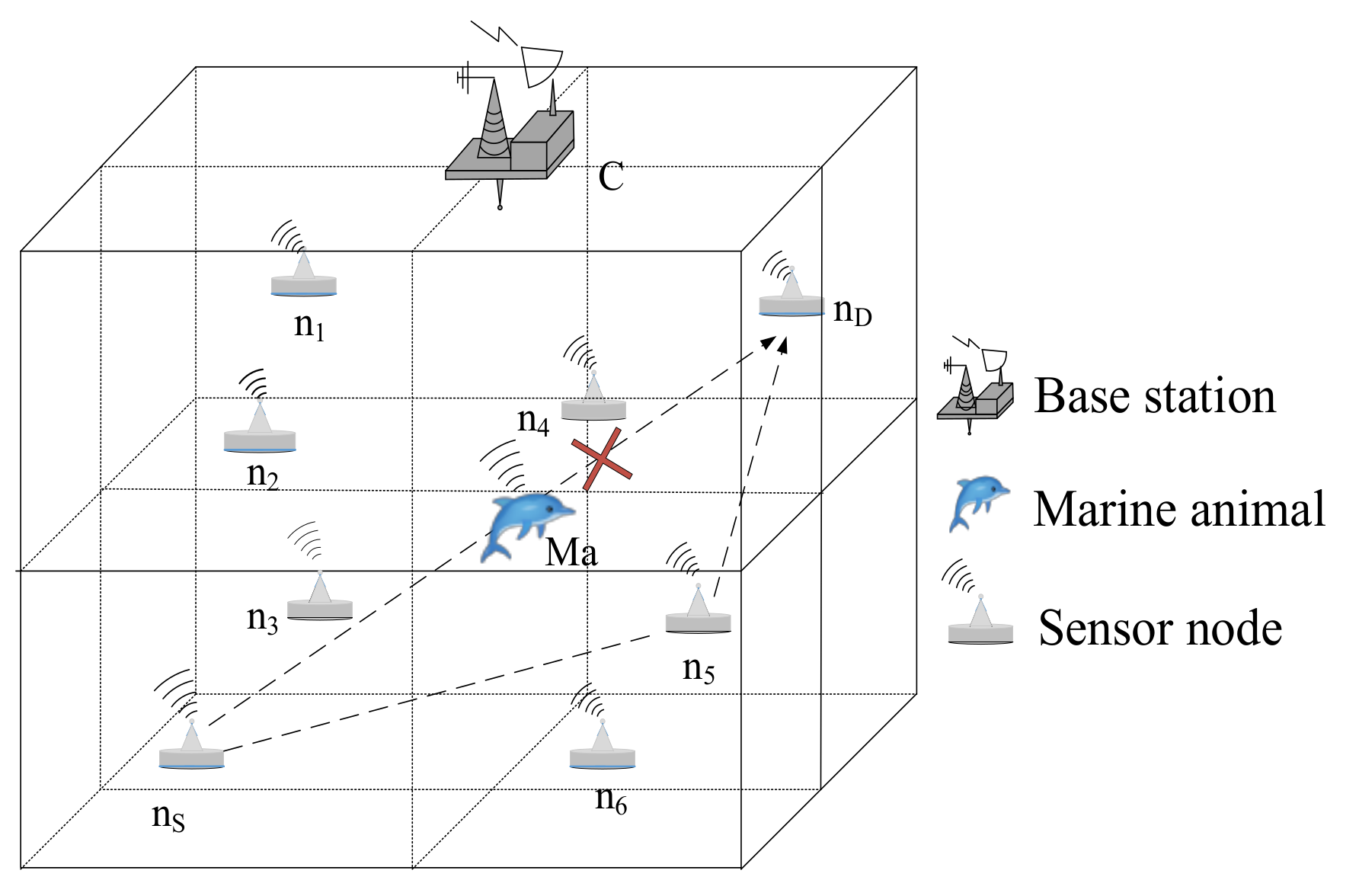
- In a network where marine animals and sensor nodes coexist, the underwater acoustic channel model is used to determine the interference area of the animal-nodes and then form the candidate forwarding relay set, which can reduce the possibility of those sensor nodes that are interfered by marine animals becoming the candidate forwarding relay set.
- (2)
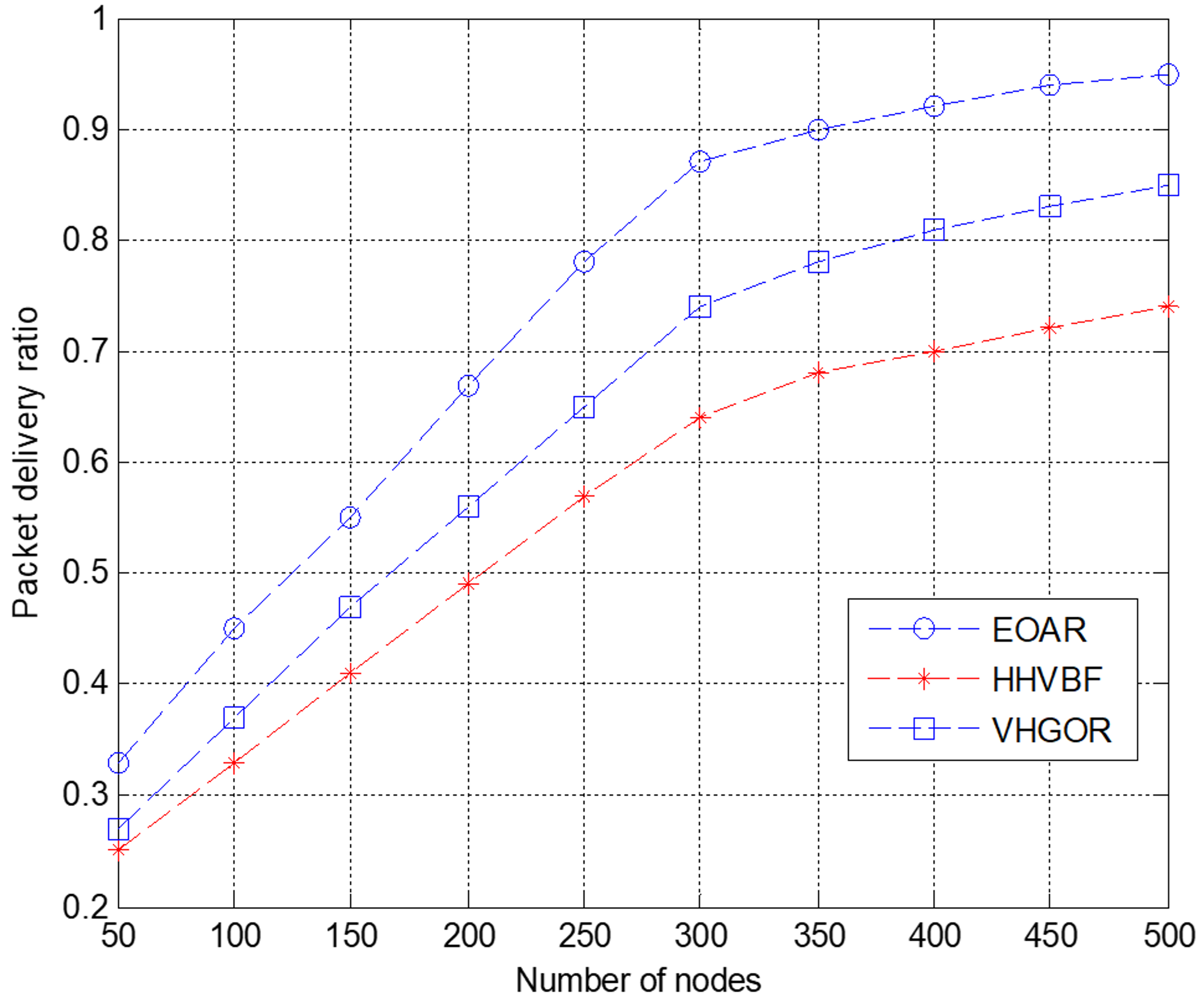
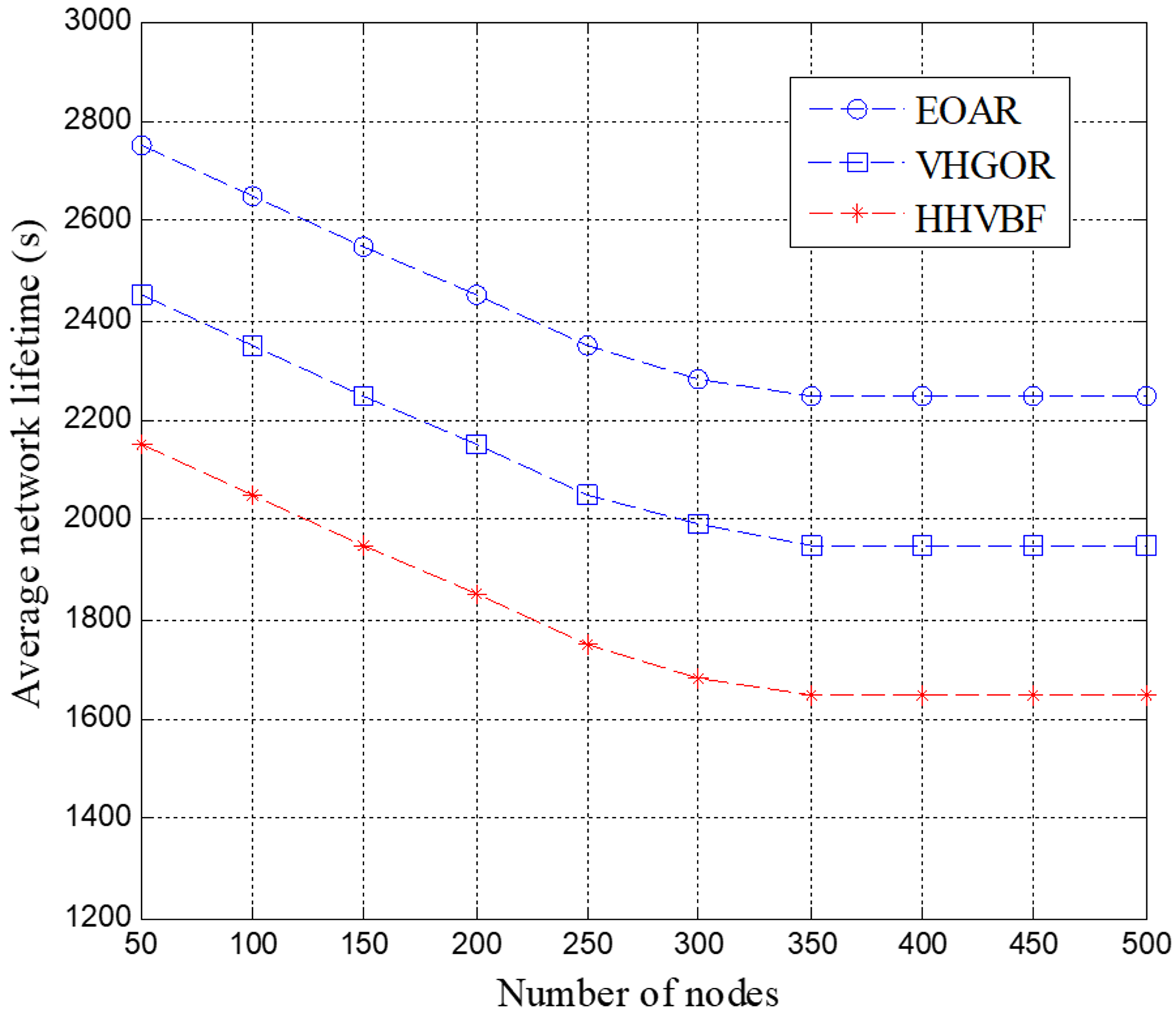
- A new routing protocol call EOAR is proposed in this paper. In EOAR, the forwarding order of the nodes belonging to the candidate forwarding relay set is sorted using a fuzzy logic-based forwarding relay selection scheme. By considering more metrics, including propagation delay, the included angle between two neighbor nodes and the residual energy, the proposed EOAR protocol improves packet delivery ratio and extends network lifetime compared to routing protocols previously applied to fuzzy logic [13].
2. Related Work
3. Models
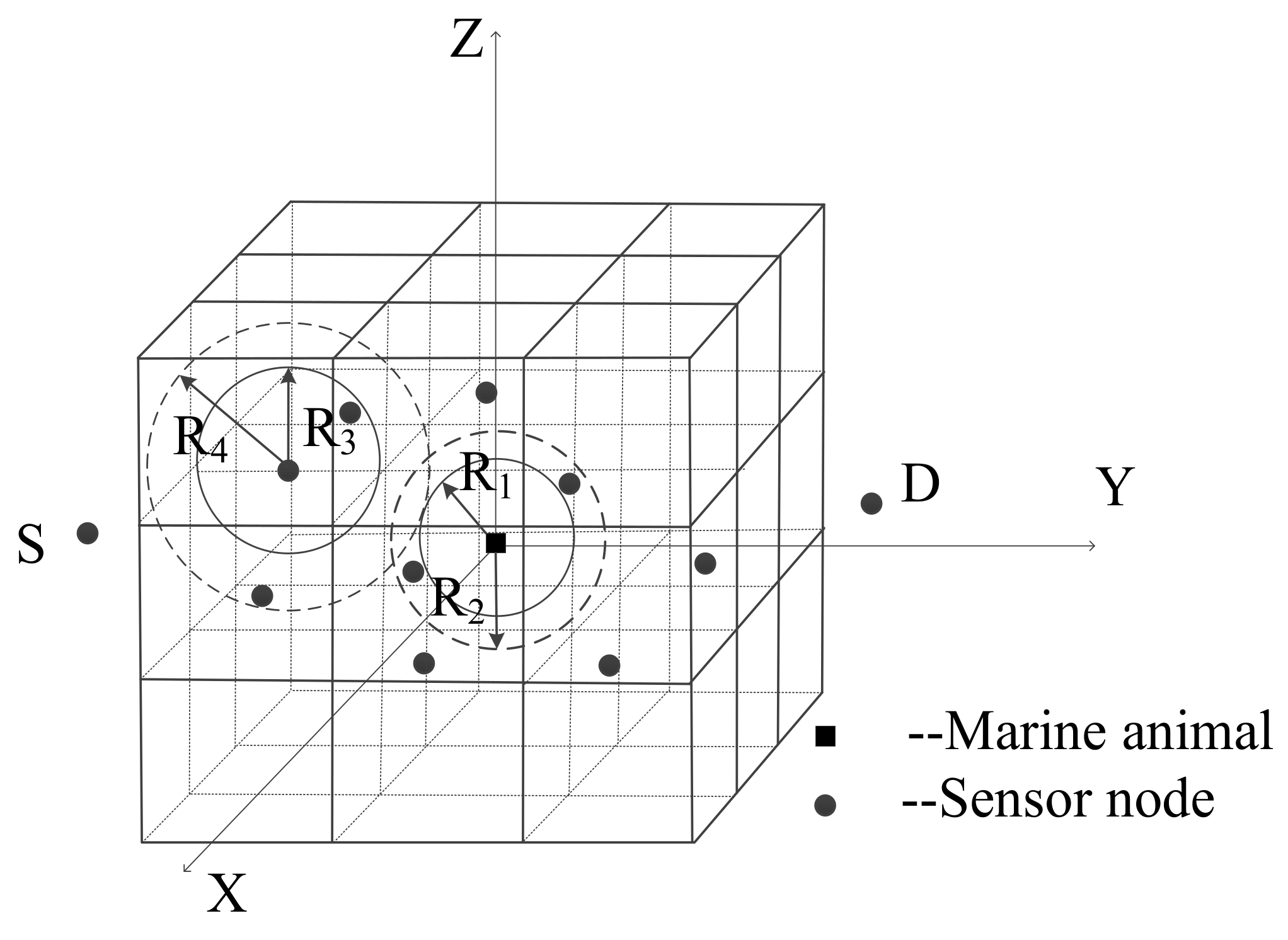
3.1. Network Model
3.2. Underwater Acoustic Channel Model
4. Design of Energy-Efficient and Obstacle-Avoiding Routing Protocol
4.1. Candidate Forwarding Relay Set Determination
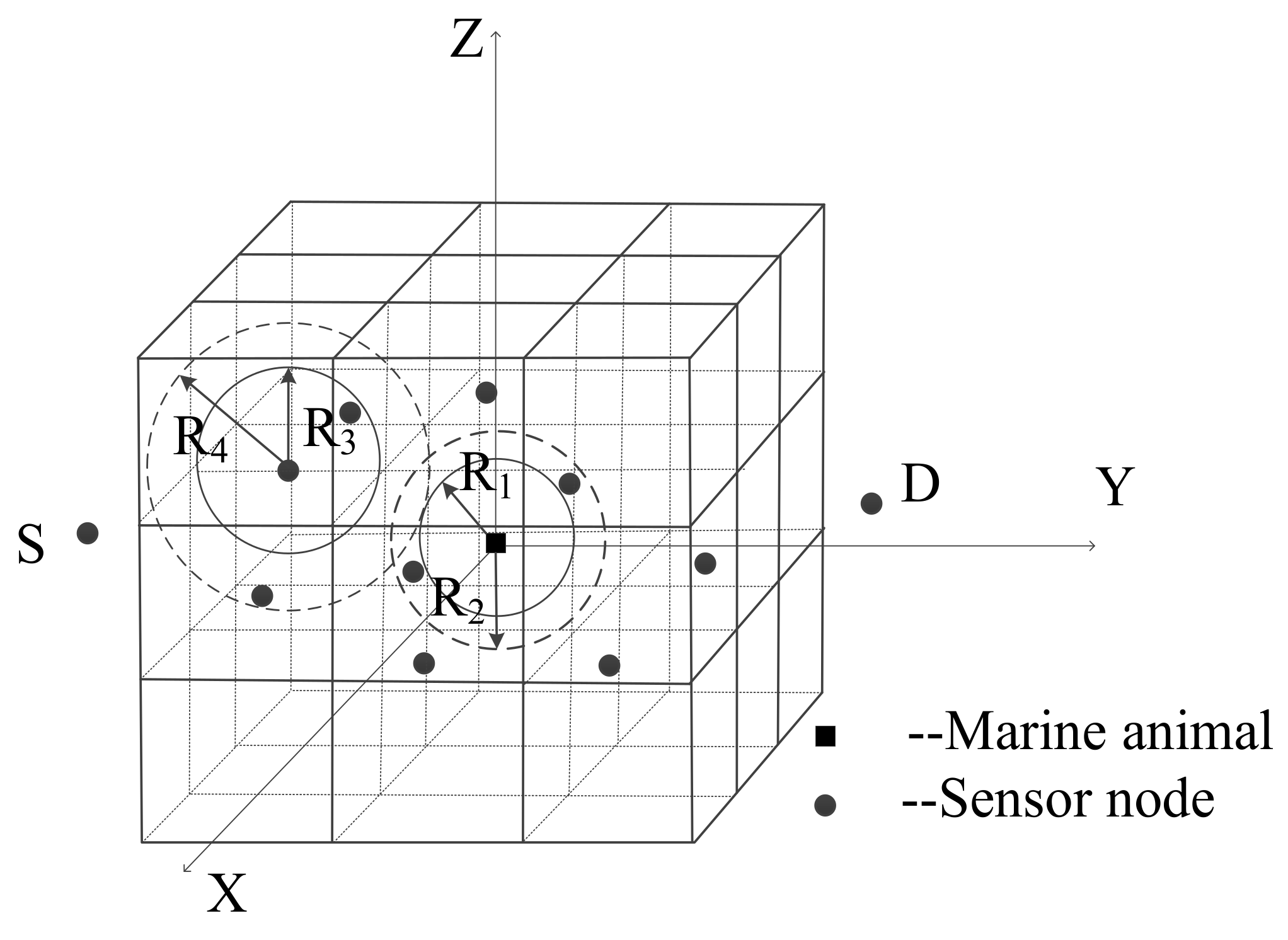
- The first constrain is , where is a preset signal to noise ratio threshold.
- The second constrain is that if the current node perceive interference from any marine animal, the distance from the neighbor nodes to the marine animal must satisfy the condition: . The range covered by the area formed by the new radius (which uses R5 + 1000 as the new radius R6) may include the communication range of the neighbor nodes.
- The third constrain is the included angle between the current node and its neighbor nodes. For example, when the current node wants to send a packet to destination node , first broadcasts the packet to its neighbor nodes . Each neighbor node of the source node calculates the angle using the cosine theorem based on the positions of the , and . The nodes with angle < 90° meet the constraint.
| Algorithm 1 Candidate Forwarding Relay Set Determination |
| Input: the positions of the , and Output: N(i) = {,,…,} //j is the number of the candidate forwarding relays Initialization: N(i) = ∅; 1: M = Nn ; // Number of neighbor nodes 2: for j = 1: M do 3: Calculate SNR, and ; 4: if , and < 90° then 5: N(i) = N(i) + {}; 6: end if 7: end for |
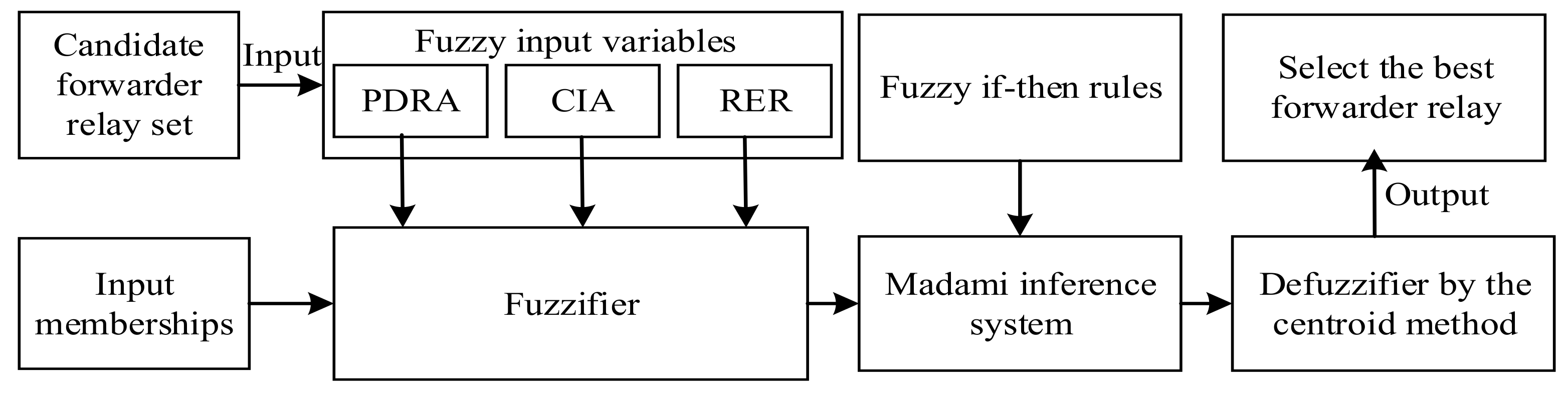
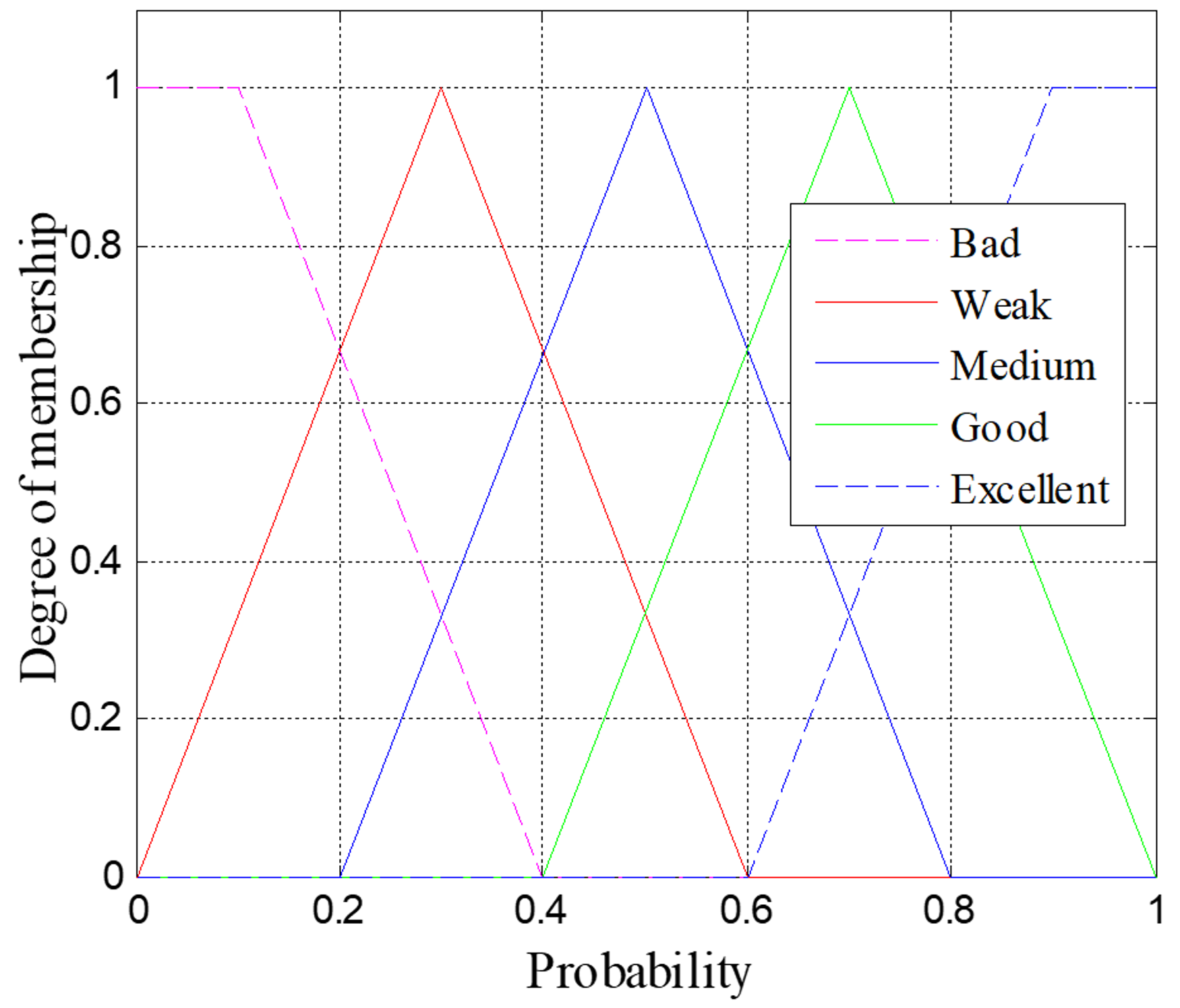
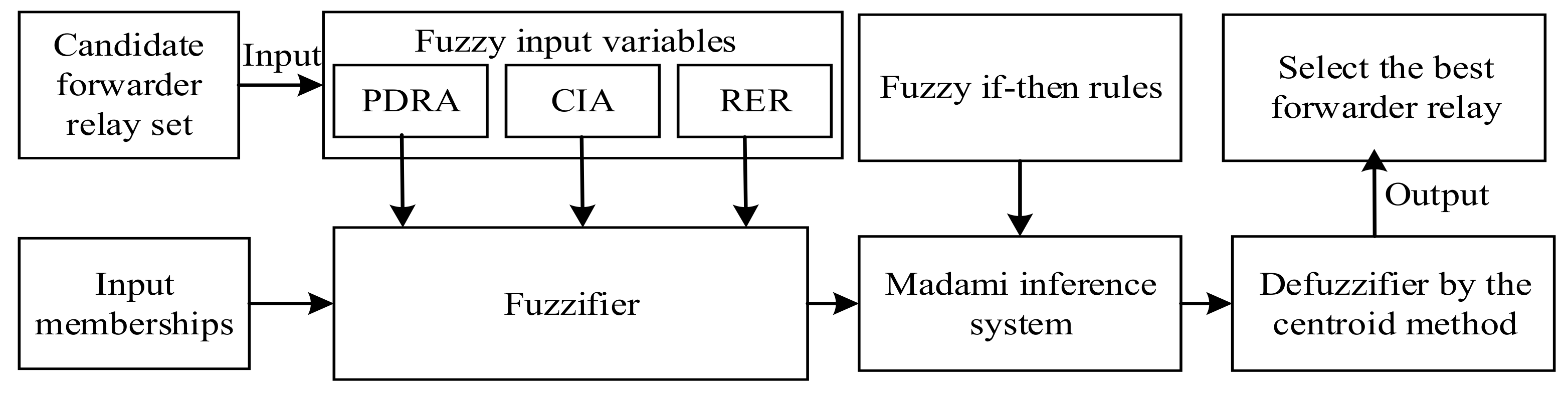
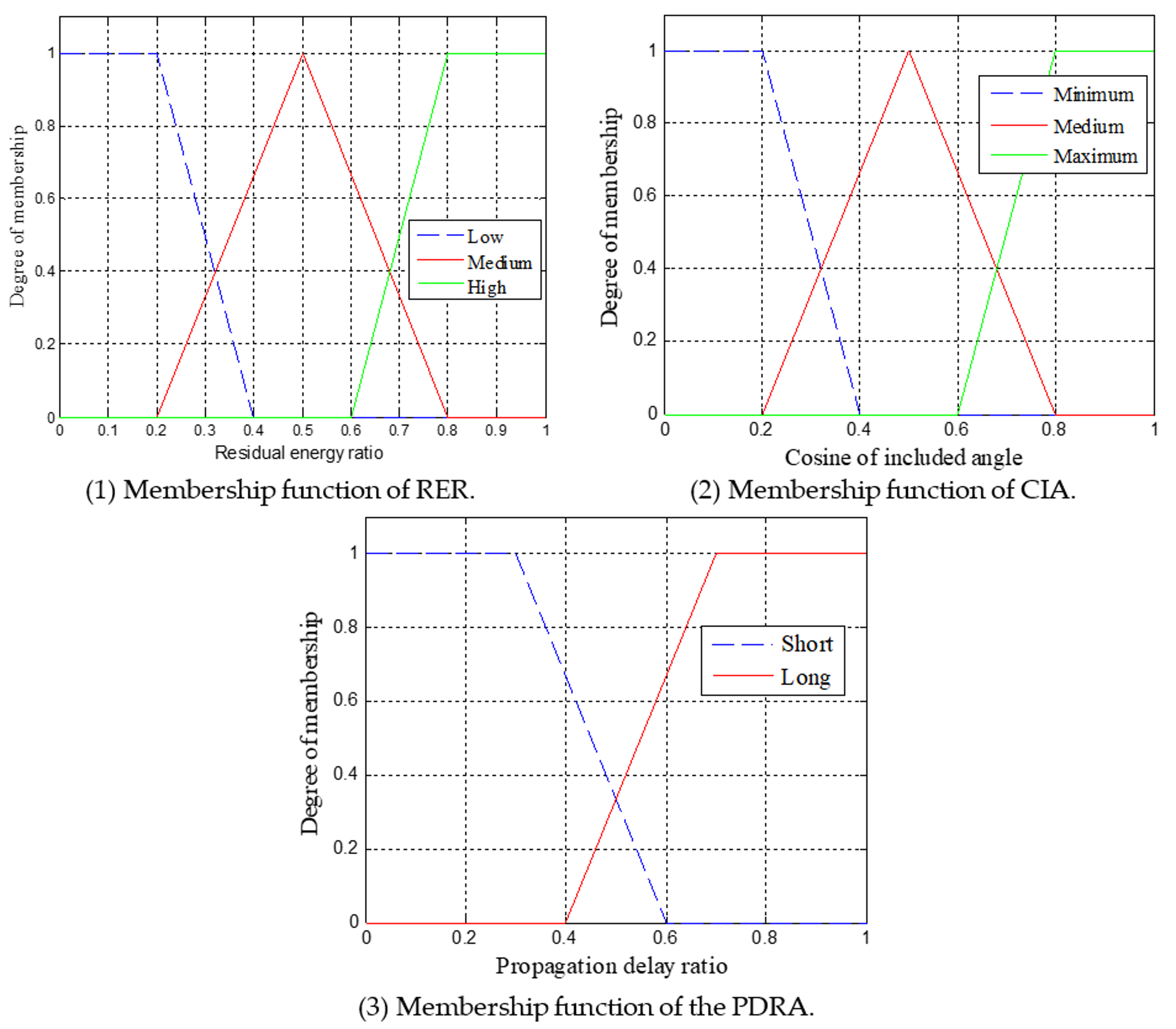
4.2. The Fuzzy Logic-Based Forwarding Relay Selection
- Re () denotes the RER of sensor nodes. The calculation formula is as follows:where and are the residual energy and the initial energy of each candidate forwarding relay, respectively.
- represents the CIA between the current node and its neighbor nodes.
- denotes the PDRA of a candidate forwarding relay. The calculation formula can be expressed as:where denotes the propagation delay from the current node to its neighbor node . Specifically, the propagation delay can be obtained by subtracting the time-stamp included in the packet from the time when the data packet is received by . Rm is the pre-defined maximum transmission distance. The underwater acoustic speed (m/s) is the function of depth, temperature and salinity of seawater [31]:where T is the temperature in degree Celsius, S is the salinity in parts per thousand, and D is the depth in meters.
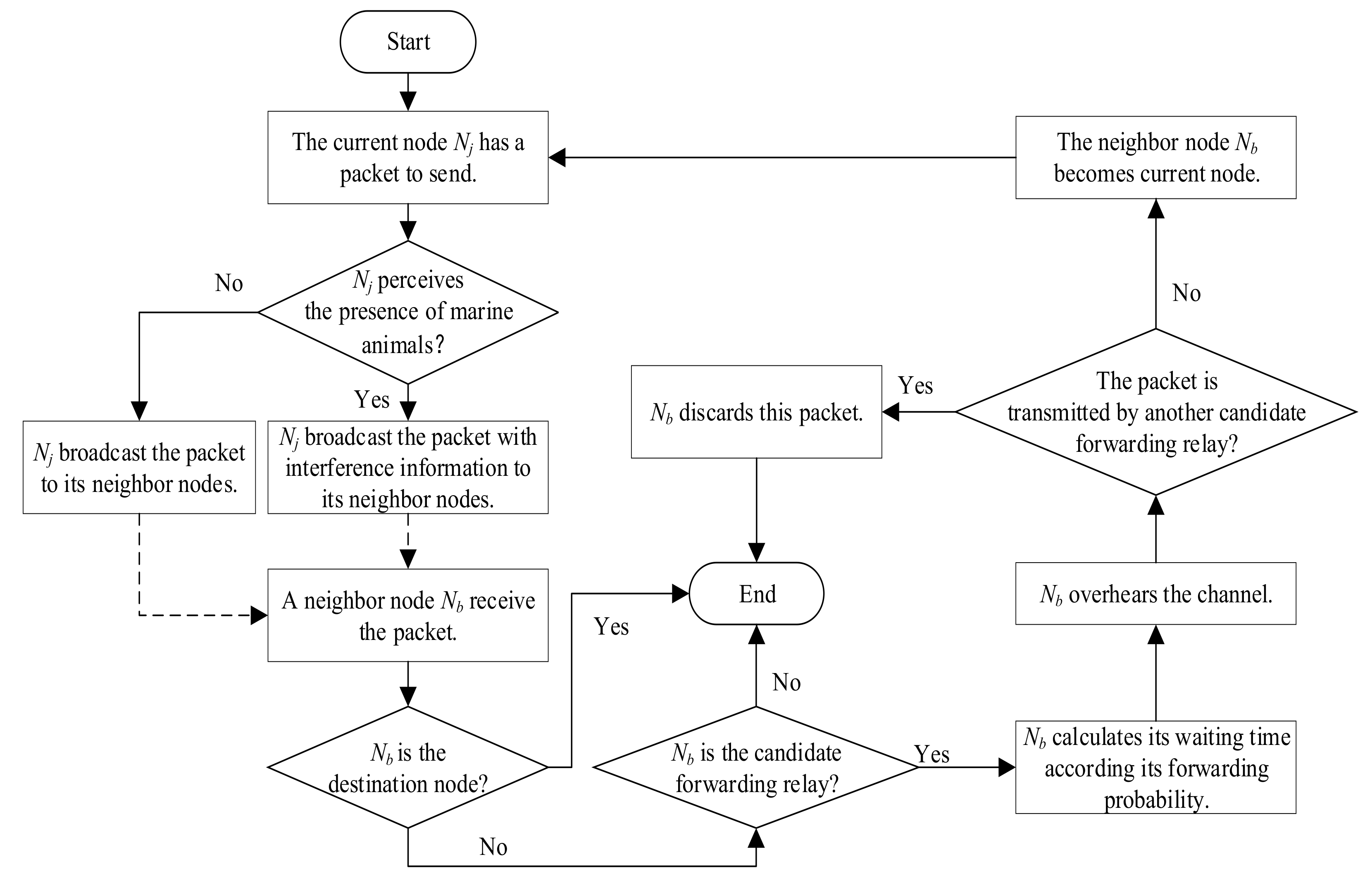
4.3. The Priority-Based Forwarding Method
5. Performance Evaluation
5.1. Experimental Framework
5.2. Evaluation with Different Parameters
6. Conclusions
Author Contributions
Funding
Conflicts of Interest
References
- Felemban, E.; Shaikh, F.K.; Qureshi, U.M.; Sheikh, A.A.; Qaisar, S.B. Underwater sensor network applications: A comprehensive survey. Int. J. Distrib. Sens. Netw. 2015, 11, 1–14. [Google Scholar] [CrossRef]
- Sheikh, A.A.; Felemban, E.; Felemban, M.; Qaisar, S.B. Challenges and opportunities for underwater sensor networks. In Proceedings of the 12th IEEE International Conference on Innovations in Information Technology (IIT), Al Ain, UAE, 28–30 November 2016; pp. 1–6. [Google Scholar]
- Darehshoorzadeh, A.; Boukerche, A. Underwater sensor networks: A new challenge for opportunistic routing protocols. IEEE Commun. Mag. 2015, 53, 98–107. [Google Scholar] [CrossRef]
- Zhang, S.; Wang, Z.; Liu, M.; Qiu, M. Energy-aware routing for delay-sensitive underwater wireless sensor networks. Sci. China-Inf. Sci. 2014, 57, 93–106. [Google Scholar] [CrossRef]
- Li, N.; Martínez, J.F.; Meneses Chaus, J.M.; Eckert, M. A survey on underwater acoustic sensor network routing protocols. Sensors 2016, 16, 414. [Google Scholar] [CrossRef] [PubMed] [Green Version]
- Coutinho, R.W.L.; Boukerche, A.; Vieira, L.F.M.; Loureiro, A.A. Geographic and Opportunistic Routing for Underwater Sensor Networks. IEEE Trans. Comput. 2016, 65, 548–561. [Google Scholar] [CrossRef]
- Naranjo, P.G.V.; Shojafar, M.; Mostafaei, H.; Pooranian, Z.; Baccarelli, E. P-SEP: A prolong stable election routing algorithm for energy-limited heterogeneous fog-supported wireless sensor networks. J. Supercomput. 2017, 73, 733–755. [Google Scholar] [CrossRef]
- Khasawneh, A.; Latiff, M.S.B.A.; Kaiwartya, O.; Chizari, H. A reliable energy-efficient pressure-based routing protocol for underwater wireless sensor network. Wirel. Netw. 2018, 24, 2061–2075. [Google Scholar] [CrossRef]
- Kanthimathi, N. Void handling using Geo-Opportunistic Routing in underwater wireless sensor networks. Comput. Electr. Eng. 2017, 64, 365–379. [Google Scholar] [CrossRef]
- Tyack, P.L.; Janik, V.M. Animal Communication and Noise. Brumm, H., Ed.; Springer: Berlin/Heidelberg, Germany, 2013; pp. 89–94. ISBN 978-3-642-41494-7. [Google Scholar]
- Yao, G.D.; Jin, Z.G.; Su, Y.S. An environment-friendly spectrum decision strategy for underwater wireless sensor networks. In Proceedings of the IEEE International Conference on Communications, London, UK, 8–12 June 2015; pp. 6370–6375. [Google Scholar]
- Stojanovic, M. On the relationship between capacity and distance in an underwater acoustic communication channel. In Proceedings of the 1st ACM international workshop on Underwater Networks, Los Angeles, CA, USA, 25 September 2006; pp. 41–45. [Google Scholar]
- Huang, C.J.; Wang, Y.W.; Liao, H.H.; Lin, C.F.; Hu, K.W.; Chang, T.Y. A power-efficient routing protocol for underwater wireless sensor networks. Appl. Soft. Comput. 2011, 11, 2348–2355. [Google Scholar] [CrossRef]
- Han, G.; Jiang, J.; Bao, N.; Wan, L.; Guizani, M. Routing protocols for underwater wireless sensor networks. IEEE Commun. Mag. 2015, 53, 72–78. [Google Scholar] [CrossRef]
- Noh, Y.; Lee, U.; Wang, P.; Choi, B.S.C.; Gerla, M. VAPR: Void-aware pressure routing for underwater sensor networks. IEEE Trans. Mob. Comput. 2013, 12, 895–908. [Google Scholar] [CrossRef]
- Xie, P.; Cui, J.H.; Lao, L. VBF: Vector-based forwarding protocol for underwater sensor networks. In Proceedings of the 5th International IFIP-TC6 Networking Conference, Coimbra, Portugal, 15–19 May 2006; pp. 1216–1221. [Google Scholar]
- Nicolaou, N.; See, A.; Xie, P.; Cui, J.H.; Maggiorini, D. Improving the robustness of location-based routing for underwater sensor networks. In Proceedings of the Oceans 2007 Europe International Conference, Aberdeen, UK, 18–21 June 2007; pp. 1–6. [Google Scholar]
- Yan, H.; Shi, Z.J.; Cui, J.H. DBR: Depth-based routing for underwater sensor networks. In Networking 2008 Ad Hoc and Sensor Networks, Wireless Networks, Next Generation Internet; Das, A., Pung, H.K., Eds.; Springer: Berlin, Germany, 2008; pp. 72–86. ISBN 978-3-540-79548-3. [Google Scholar]
- Qian, L.; Zhang, S.; Liu, M.; Zhang, Q. A MACA-based power control MAC protocol for Underwater Wireless Sensor Networks. In Proceedings of the IEEE/OES China Ocean Acoustics (COA 2016), Harbin, China, 9–11 January 2016; pp. 1–8. [Google Scholar]
- Wang, H.; Wang, S.; Zhang, E.; Lu, L. An Energy Balanced and Lifetime Extended Routing Protocol for Underwater Sensor Network. Sensors 2018, 18, 1596. [Google Scholar] [CrossRef] [PubMed]
- Jin, Z.; Ma, Y.; Su, Y.; Li, S.; Li, S.; Fu, X. A Q-Learning-Based Delay-Aware Routing Algorithm to Extend the Lifetime of Underwater Sensor Networks. Sensors 2017, 17, 1660. [Google Scholar] [CrossRef] [PubMed]
- Ahmed, F.; Gul, S.; Khalil, M.A.; Sher, A.; Sher, A.; Khan, Z.A.; Qasim, U.; Javed, N. Two Hop Adaptive Routing Protocol for Underwater Wireless Sensor Networks. In Proceedings of the 11th International Conference on Innovative Mobile and Internet Services in Ubiquitous Computing (IMIS 2017), Torino, Italy, 10–12 July 2017; pp. 181–189. [Google Scholar]
- Javaid, N.; Ahmed, F.; Wadud, Z.; Alrajeh, N.; Alabed, M.S.; Ilahi, M. Two Hop Adaptive Vector Based Quality Forwarding for Void Hole Avoidance in Underwater WSNs. Sensors 2017, 17, 1762. [Google Scholar] [CrossRef] [PubMed]
- Yu, H.; Yao, N.; Wang, T.; Li, G.; Gao, Z.; Tan, G. WDFAD-DBR: Weighting depth and forwarding area division DBR routing protocol for UASNs. Ad Hoc Netw. 2016, 37, 256–282. [Google Scholar] [CrossRef]
- Jiang, P.; Liu, J.; Wu, F. Node Non-Uniform Deployment Based on Clustering Algorithm for Underwater Sensor Networks. Sensors 2015, 15, 29997–30010. [Google Scholar] [CrossRef] [PubMed]
- Yu, H.; Yao, N.; Liu, J. An adaptive routing protocol in underwater sparse acoustic sensor networks. Ad Hoc Netw. 2015, 34, 121–143. [Google Scholar] [CrossRef]
- Baldo, N.; Casari, P.; Zorzi, M. Cognitive Spectrum Access for Underwater Acoustic Communications. In Proceedings of the IEEE International Conference on Communications Workshops (ICC Workshops 2008), Beijing, China, 19–23 May 2008; pp. 518–523. [Google Scholar]
- Lucani, D.E.; Stojanovic, M.; Medard, M. On the relationship between transmission power and capacity of an underwater acoustic communication channel. In Proceedings of the International Conference OCEANS 2008 and MTS, Kobe, Japan, 8–11 April 2008. [Google Scholar]
- Liu, J.; Wang, Z.; Cui, J.H.; Zhou, S.; Yang, B. A joint time synchronization and localization design for mobile underwater sensor networks. IEEE. Trans. Mob. Comput. 2016, 15, 530–543. [Google Scholar] [CrossRef]
- Aliev, R.A.; Pedrycz, W. Fundamentals of a Fuzzy-Logic-Based Generalized Theory of Stability. IEEE Trans. Syst. Man Cybern. Part B 2009, 39, 971–988. [Google Scholar] [CrossRef] [PubMed]
- Su, R.; Venkatesan, R.; Li, C. A review of channel modeling techniques for underwater acoustic communications. Proceedings of 19th IEEE Newfoundland Electrical and Computer Engineering, Newfoundland, NL, Canada, 7–9 November 2010; pp. 1–5. [Google Scholar]
- Janik, V.M. Source levels and the estimated active space of bottlenose dolphin (Tursiops truncatus) whistles in the Moray Firth, Scotland. J. Comp. Physiol. A-Neuroethol. 2000, 186, 673–680. [Google Scholar] [CrossRef]
- Underwater Sensor Network (UWSN) Lab. Available online: http://obinet.engr.uconn.edu/wiki/index.php/Aqua-Sim (accessed on 27 October 2018).




{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Input | Membership | ||
|---|---|---|---|
| RER | Low | Medium | High |
| CIA | Minimum | Medium | Maximum |
| PDRA | Short | Long | |
| (1) The linguistic level of PDRA is short. | |||
|---|---|---|---|
| RER/CIA | Minimum | Medium | Maximum |
| Low | Medium | Medium | Weak |
| Medium | Good | Good | Weak |
| High | Excellent | Good | Weak |
| (2) The linguistic level of PDRA is long. | |||
| RER/CIA | Minimum | Medium | Maximum |
| Low | Bad | Medium | Weak |
| Medium | Medium | Medium | Weak |
| High | Medium | Good | Weak |
| No. | Probability | |||
|---|---|---|---|---|
| 1 | 0.600 | 0.500 | 0.400 | 0.700 |
| 2 | 0.600 | 0.500 | 0.500 | 0.600 |
| 3 | 0.300 | 0.600 | 0.700 | 0.500 |
| 4 | 0.800 | 0.700 | 0.600 | 0.467 |
| 5 | 0.450 | 0.700 | 0.600 | 0.380 |
| Name | Values |
|---|---|
| Simulation scene range Number of nodes Bit rate Data packet size Transmission range Transmission power Receiving power Idle power Initial energy of every sensor node | 9 km × 9 km × 7 km ≤500 9 kb/s 200 B 1.5 km 10 W 3 W 30 mW 104 J |
© 2018 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Jin, Z.; Ding, M.; Li, S. An Energy-Efficient and Obstacle-Avoiding Routing Protocol for Underwater Acoustic Sensor Networks. Sensors 2018, 18, 4168. https://doi.org/10.3390/s18124168
Jin Z, Ding M, Li S. An Energy-Efficient and Obstacle-Avoiding Routing Protocol for Underwater Acoustic Sensor Networks. Sensors. 2018; 18(12):4168. https://doi.org/10.3390/s18124168
Chicago/Turabian StyleJin, Zhigang, Mengge Ding, and Shuo Li. 2018. "An Energy-Efficient and Obstacle-Avoiding Routing Protocol for Underwater Acoustic Sensor Networks" Sensors 18, no. 12: 4168. https://doi.org/10.3390/s18124168
APA StyleJin, Z., Ding, M., & Li, S. (2018). An Energy-Efficient and Obstacle-Avoiding Routing Protocol for Underwater Acoustic Sensor Networks. Sensors, 18(12), 4168. https://doi.org/10.3390/s18124168