Application of Convolutional Long Short-Term Memory Neural Networks to Signals Collected from a Sensor Network for Autonomous Gas Source Localization in Outdoor Environments

 and
and
Abstract
:1. Introduction
2. Materials and Methods
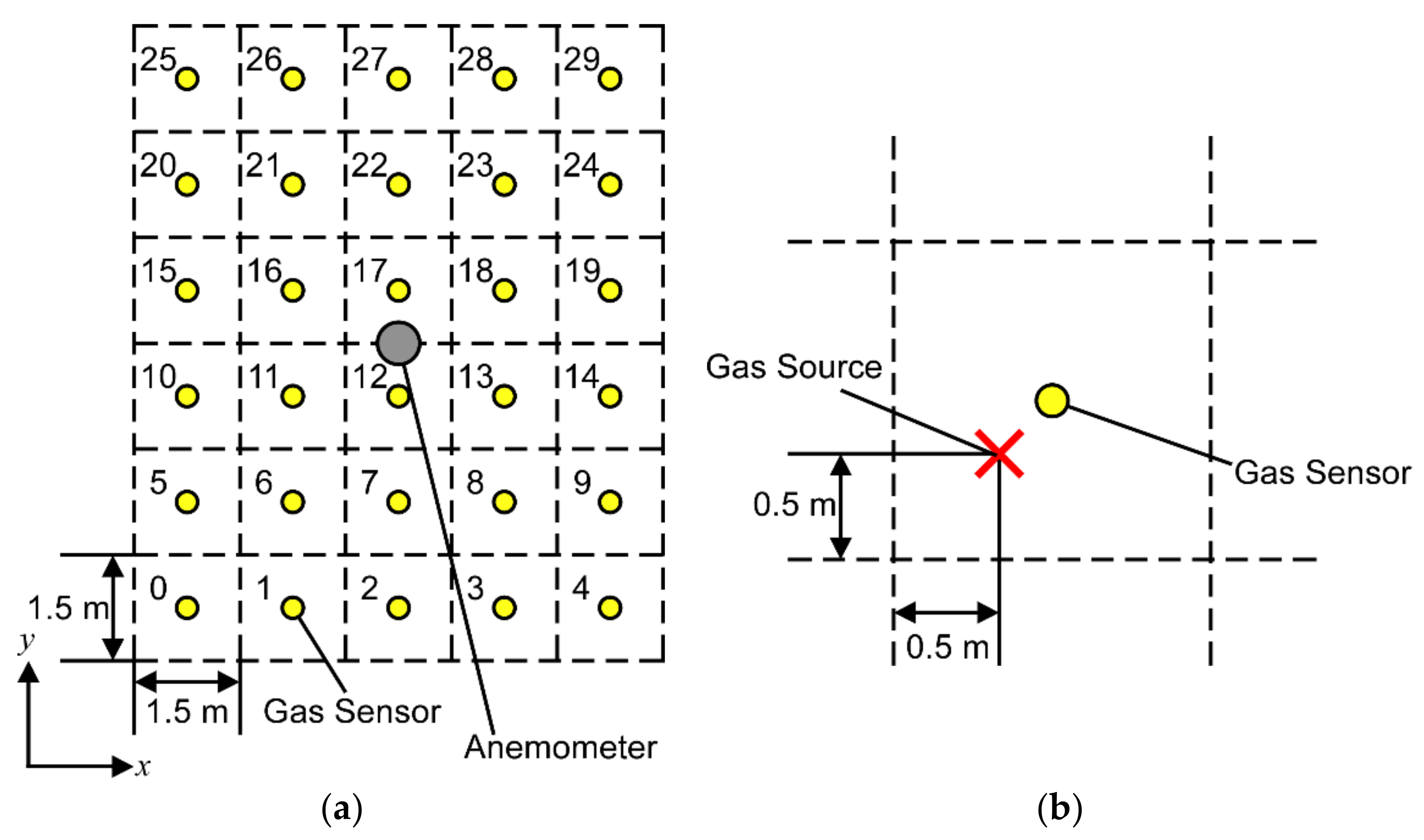
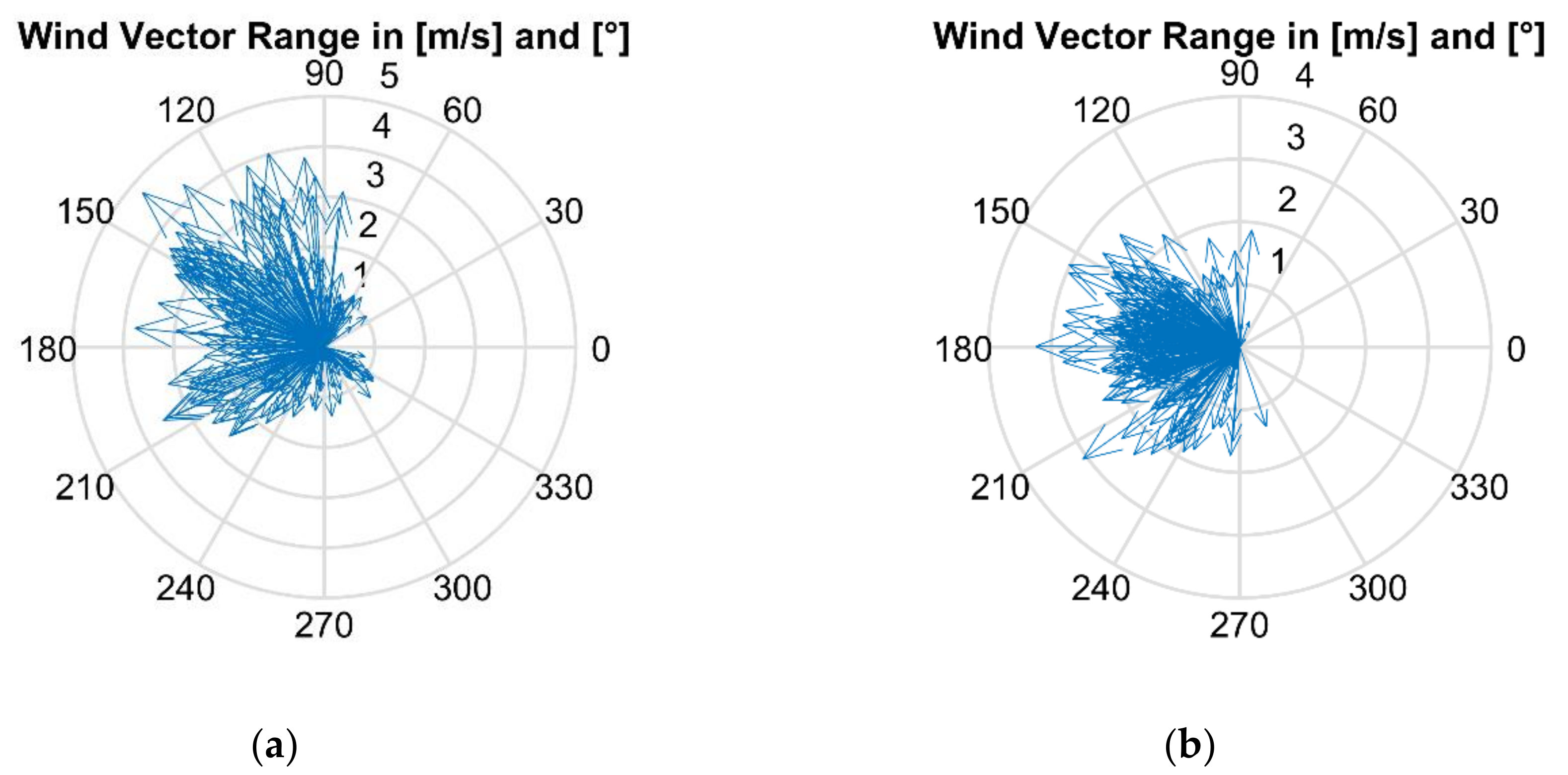
2.1. Experimental Data
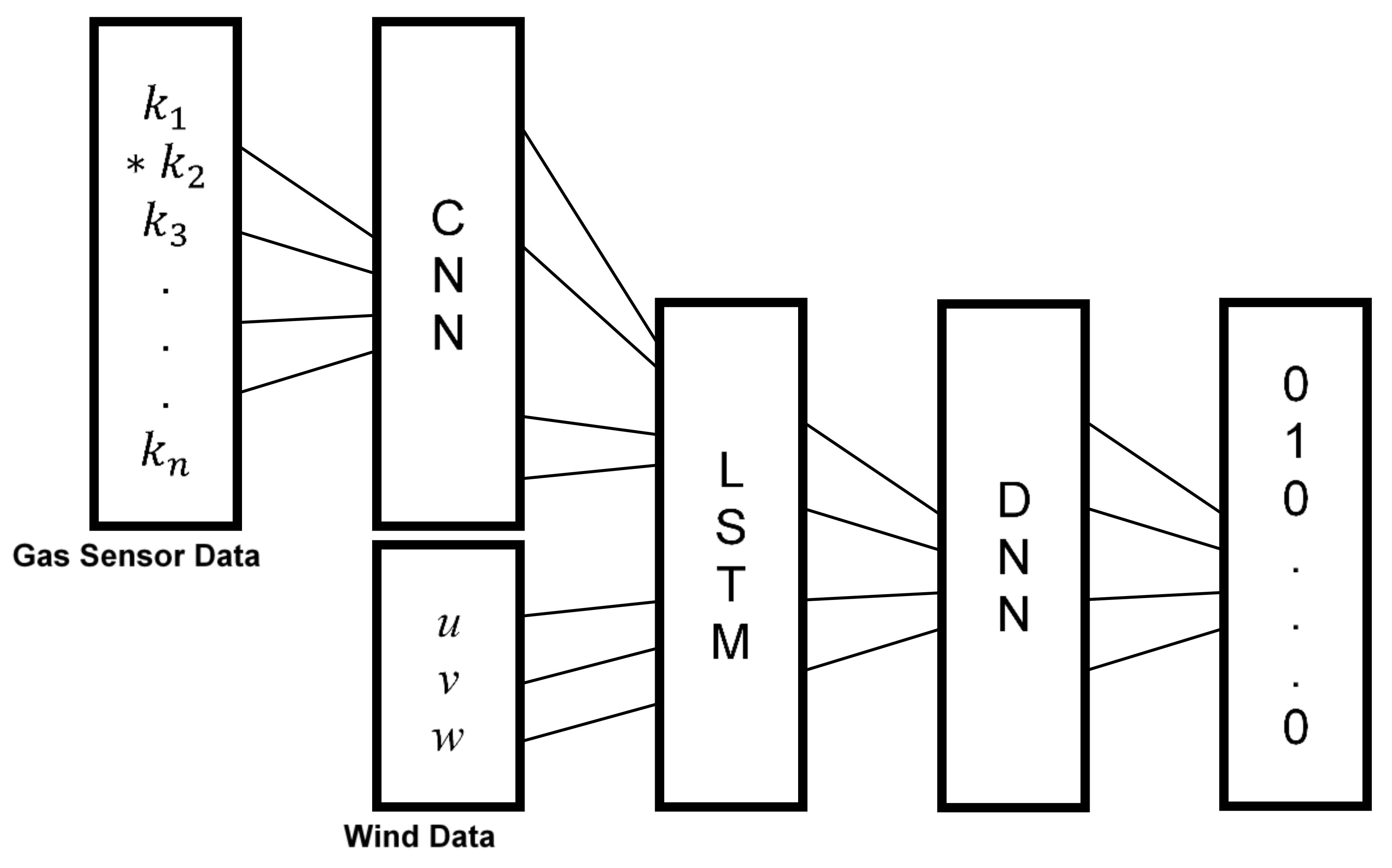
2.2. Methodology
2.3. Optimizations
2.4. Training and Validation
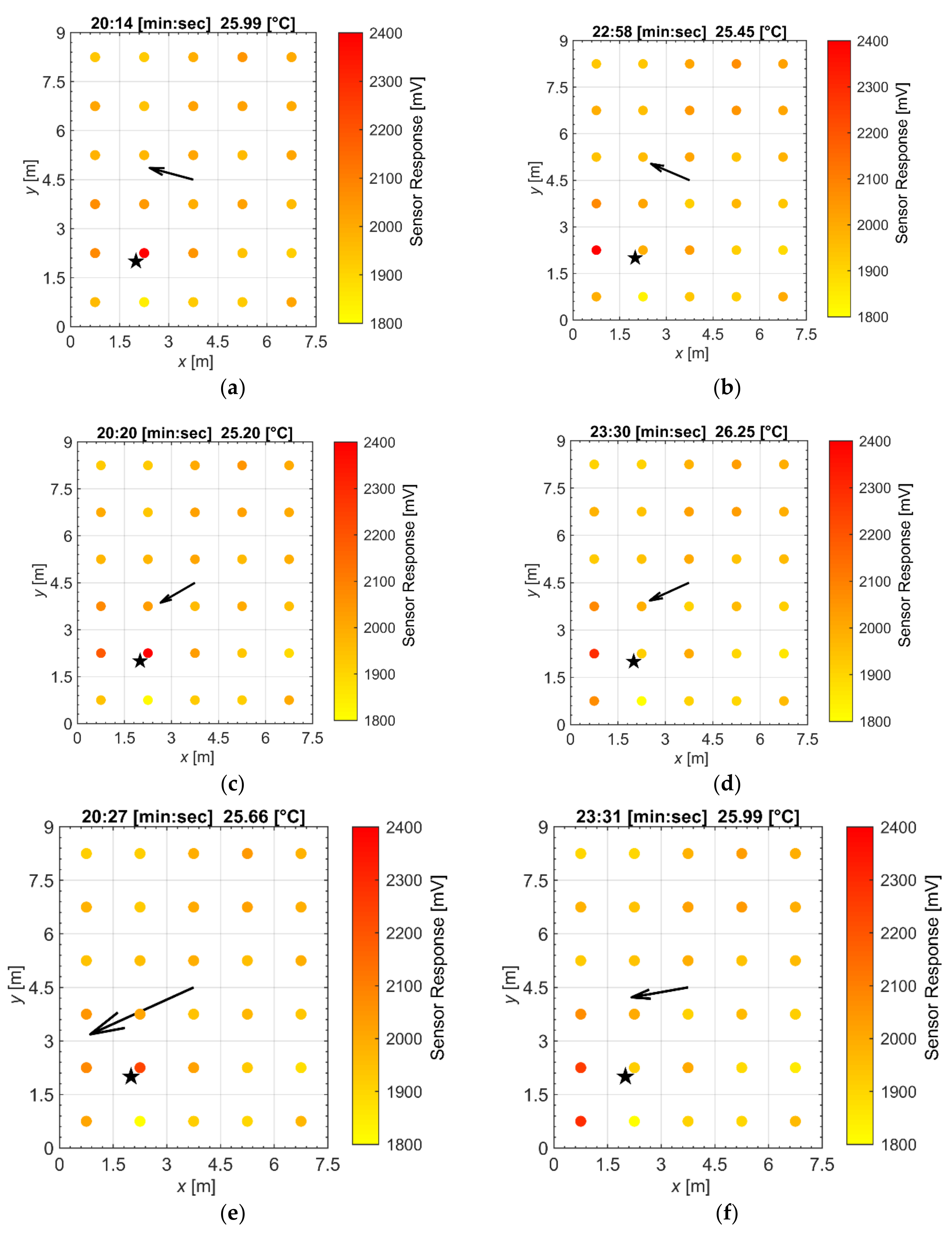
3. Results and Discussion
4. Conclusions
Author Contributions
Funding
Acknowledgments
Conflicts of Interest
References
- Hernandez Bennetts, V.; Lilienthal, A.J.; Neumann, P.P.; Trincavelli, M. Mobile robots for localizing gas emission sources on landfill sites: Is bio-inspiration the way to go? Front. Neuroeng. 2012, 4. [Google Scholar] [CrossRef] [PubMed]
- Donoghue, A.M. Occupational health hazards in mining: An overview. Occup. Med. 2004, 54, 283–289. [Google Scholar] [CrossRef] [PubMed]
- Ishida, H.; Lilienthal, A.J.; Matsukura, H.; Hernandez Bennetts, V.; Schaffernicht, E. Using chemical sensors as “noses” for mobile robots. In Essentials of Machine Olfaction and Taste, 1st ed.; Nakamoto, T., Ed.; John Wiley & Sons: Singapore, 2016; pp. 219–245. ISBN 9781118768488. [Google Scholar]
- Ishida, H.; Wada, Y.; Matsukura, H. Chemical sensing in robotic applications: A review. IEEE Sens. J. 2012, 12, 3163–3173. [Google Scholar] [CrossRef]
- Willis, M.A.; Avondet, J.L.; Zheng, E. The role of vision in odor-plume tracking by walking and flying insects. J. Exp. Biol. 2011, 214, 4121–4132. [Google Scholar] [CrossRef] [PubMed] [Green Version]
- Ishida, H.; Nakayama, G.; Nakamoto, T.; Moriizumi, T. Controlling a gas/odor plume-tracking robot based on transient responses of gas sensors. IEEE Sens. J. 2005, 5, 537–545. [Google Scholar] [CrossRef]
- Lochmatter, T.; Raemy, X.; Matthey, L.; Indra, S.; Martinoli, A. A comparison of casting and spiraling algorithms for odor source localization in laminar flow. In Proceedings of the IEEE International Conference on Robotics and Automation, Pasadena, CA, USA, 19–23 May 2008; pp. 1138–1143. [Google Scholar]
- Li, J.G.; Meng, Q.H.; Wang, Y.; Zeng, M. Odor source localization using a mobile robot in outdoor airflow environments with a particle filter algorithm. Auton. Robots 2011, 30, 281–292. [Google Scholar] [CrossRef]
- Neumann, P.P.; Hernandez Bennetts, V.; Lilienthal, A.J.; Bartholmai, M.; Schiller, J.H. Gas source localization with a micro-drone using bio-inspired and particle filter-based algorithms. Adv. Robot. 2013, 27, 725–738. [Google Scholar] [CrossRef]
- Matthes, J.; Gröll, L.; Keller, H.B. Source localization by spatially distributed electronic noses for advection and diffusion. IEEE Trans. Signal Process. 2005, 53, 1711–1719. [Google Scholar] [CrossRef]
- Cao, M.L.; Meng, Q.H.; Zeng, M.; Sun, B.; Li, W.; Ding, C.J. Distributed least-squares estimation of a remote chemical source via convex combination in wireless sensor networks. Sensors 2014, 14, 11444–11466. [Google Scholar] [CrossRef] [PubMed]
- Mahfouz, S.; Mourad-Chehade, F.; Honeine, P.; Farah, J.; Snoussi, H. Gas source parameter estimation using machine learning in WSNs. IEEE Sens. J. 2016, 16, 5795–5804. [Google Scholar] [CrossRef]
- Tsironi, E.; Barros, P.; Wermter, S. Gesture recognition with a Convolutional Long Short-Term Memory Recurrent Neural Network. In Proceedings of the European Symposium on Artificial Neural Networks, Computational Intelligence and Machine Learning, Bruges, Belgium, 27–29 April 2016; pp. 213–218. [Google Scholar]
- Tsironi, E.; Barros, P.; Weber, C.; Wermter, S. An analysis of Convolutional Long Short-Term Memory Recurrent Neural Networks for gesture recognition. Neurocomputing 2017, 268, 76–86. [Google Scholar] [CrossRef]
- Donahue, J.; Hendricks, L.A.; Rohrbach, M.; Venugopalan, S.; Guadarrama, S.; Saenko, K.; Darrell, T. Long-term Recurrent Convolutional Networks for visual recognition and description. IEEE Trans. Pattern Anal. Mach. Intell. 2017, 39, 677–691. [Google Scholar] [CrossRef] [PubMed]
- Wang, J.; Zhang, R.; Yan, Y.; Dong, X.; Li, J.M. Locating hazardous gas leaks in the atmosphere via modified genetic, MCMC and particle swarm optimization algorithms. Atmos. Environ. 2017, 157, 27–37. [Google Scholar] [CrossRef]
- Fonollosa, J.; Rodríguez-Luján, I.; Trincavelli, M.; Vergara, A.; Huerta, R. Chemical discrimination in turbulent gas mixtures with MOX sensors validated by gas chromatography-mass spectrometry. Sensors 2014, 14, 19336–19353. [Google Scholar] [CrossRef] [PubMed]
- Zeiler, M.D.; Fergus, R. Visualizing and understanding Convolutional Networks. In Proceedings of the 13th European Conference on Computer Vision, Part I, Zurich, Switzerland, 6–12 September 2014; Fleet, D., Pajdla, T., Schiele, B., Tuytelaars, T., Eds.; Springer: Cham, Switzerland, 2014; pp. 818–833. [Google Scholar]
- Hochreiter, S.; Schmidhurber, J. Long short-term memory. Neural Comput. 1997, 9, 1735–1780. [Google Scholar] [CrossRef] [PubMed]
- Gers, F.A.; Schmidhuber, J.; Cummins, F. Learning to forget: Continual prediction with LSTM. Neural Comput. 2000, 12, 2451–2471. [Google Scholar] [CrossRef] [PubMed]
- Ioffe, S.; Szegedy, C. Batch normalization: Accelerating deep network training by reducing internal covariate shift. In Proceedings of the 32nd International Conference on Machine Learning, Lille, France, 6–11 July 2015; pp. 448–456. [Google Scholar]
- Srivastava, N.; Hinton, G.; Krizhevsky, A.; Sutskever, I.; Salakhutdinov, R. Dropout: A simple way to prevent neural networks from overfitting. J. Mach. Learn. Res. 2014, 15, 1929–1958. [Google Scholar]








{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Model | Accuracy | Precision | Recall | F1-Score | Validation Error | Epoch |
|---|---|---|---|---|---|---|
| CNN-LSTM | 95.0% | 96.5% | 95.0% | 94.7% | 0.0115 | 160 |
| LSTM | 85.0% | 87.3% | 85.0% | 84.9% | 0.0307 | 310 |
| CNN-DNN | 90.0% | 92.7% | 90.0% | 89.1% | 0.0273 | 260 |
| DNN | 91.1% | 93.0% | 91.1% | 90.6% | 0.0200 | 350 |
| Model | Accuracy | Precision | Recall | F1-Score | Validation Error | Epoch |
|---|---|---|---|---|---|---|
| CNN-LSTM | 93.9% | 95.6% | 93.9% | 93.6% | 0.0116 | 300 |
| LSTM | 88.9% | 89.9% | 88.9% | 88.4% | 0.0214 | 290 |
| CNN-DNN | 93.3% | 94.8% | 93.3% | 93.0% | 0.0135 | 300 |
| DNN | 88.3% | 91.6% | 88.3% | 87.6% | 0.0206 | 270 |
© 2018 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Bilgera, C.; Yamamoto, A.; Sawano, M.; Matsukura, H.; Ishida, H. Application of Convolutional Long Short-Term Memory Neural Networks to Signals Collected from a Sensor Network for Autonomous Gas Source Localization in Outdoor Environments. Sensors 2018, 18, 4484. https://doi.org/10.3390/s18124484
Bilgera C, Yamamoto A, Sawano M, Matsukura H, Ishida H. Application of Convolutional Long Short-Term Memory Neural Networks to Signals Collected from a Sensor Network for Autonomous Gas Source Localization in Outdoor Environments. Sensors. 2018; 18(12):4484. https://doi.org/10.3390/s18124484
Chicago/Turabian StyleBilgera, Christian, Akifumi Yamamoto, Maki Sawano, Haruka Matsukura, and Hiroshi Ishida. 2018. "Application of Convolutional Long Short-Term Memory Neural Networks to Signals Collected from a Sensor Network for Autonomous Gas Source Localization in Outdoor Environments" Sensors 18, no. 12: 4484. https://doi.org/10.3390/s18124484
APA StyleBilgera, C., Yamamoto, A., Sawano, M., Matsukura, H., & Ishida, H. (2018). Application of Convolutional Long Short-Term Memory Neural Networks to Signals Collected from a Sensor Network for Autonomous Gas Source Localization in Outdoor Environments. Sensors, 18(12), 4484. https://doi.org/10.3390/s18124484