1. Introduction
Noncircular complex signals (e.g., binary-phase-shift-keying (BPSK), multiple-amplitude-shift-keying (MASK) and offset-quadrature-phase-shift-keying (OQPSK) modulated signals) are extensively employed in modern communication systems. During the last few years, the algorithms for noncircular complex sources with application to signal processing [
1,
2,
3,
4,
5,
6,
7] have received an upsurge of attention. Different from circular signals, the unconjugated statistical property of noncircular complex signals adds to the amount of available information, which can help to enhance the performance. Since many communication systems offer location-based services, the problem of accurate localization for noncircular sources is worth further investigation.
Conventional localization methods employ two-step processing [
8,
9,
10,
11], where the measurement parameters (e.g., direction of arrival (DOA), time of arrival (TOA) and frequency difference of arrival (FDOA)) are first extracted, and then, the source positions are estimated. In the first step, parameter estimation algorithms for noncircular (NC) signals such as the NC-MUSIC algorithm (multiple signal classification algorithm for noncircular signals) [
5] can improve the accuracy, due to the exploitation of the noncircular property. However, the localization algorithm in the second step cannot utilize the properties of signals. Moreover, when multiple sources exist, the two-step localization system confronts the association problem of deciding which of the multiple measurements reported by the observers corresponds to which source. If the measurements are not correctly related to the transmitter, additional errors are produced. As a consequence, these conventional two-step methods are suboptimal and cannot guarantee high localization precision for noncircular sources.
Compared with the conventional two-step methods, direct position determination (DPD) [
12,
13,
14,
15,
16,
17,
18,
19,
20,
21,
22] is a single-step localization method without computing the intermediate parameters and augments the position estimation with the constraint that all measurements correspond to the same geolocation of the transmitter. Therefore, DPD can avoid the association problem, and its location accuracy has shown to be significantly higher than that of the conventional two-step methods, especially under low signal-to-noise ratio (SNR) conditions [
13]. However, the DPD technique often requires the transmission of the sampling data to a central processing location and yields a large amount of computations [
16].
Nowadays, DPD algorithms applied to the scenario of widely-separated arrays have been intensively investigated [
13,
14,
15,
16,
17,
18]. A maximum likelihood (ML)-based DPD algorithm was presented in [
16], where the locations of multiple sources are decoupled into several lower dimensional optimization problems with the information of uncorrelated waveforms. However, in passive localization systems, signal waveforms are always unknown at the receiver. When solving ML estimators for multiple sources without known waveforms, there is a variety of stray parameters, which requires a substantial computational effort. To this end, Amar and Weiss proposed an iterative algorithm for DPD of multiple unknown signals to reduce the complexity [
17]. Although this ML estimator can approach the associated Cramér–Rao bound, its iterative procedure is complicated as it has to perform a grid search during each iteration.
To make the localization computationally attractive for multiple transmitters, an alternative method is the subspace data fusion (SDF). It has lower computational complexity than ML methods, due to the fact that all source positions are estimated from a MUSIC-like cost function that depends on the parameters of the same dimension as that for only one source. Two SDF-based DPDs were developed in [
16] and [
18], respectively. One is based on the time domain and implicitly uses the array responses [
18], and the other processes the frequency-domain observations and relies on the assumption that the envelopes of the signals are the same at all observers, up to delay and amplitude caused by the propagation channel [
16]. Therefore, the latter can exploit the location information embedded in both array responses and TOAs, leading to higher accuracy. However, these SDF-based DPD algorithms were designed for general sources (i.e., circular signals) and did not consider the property of noncircular signals. For this reason, we proposed an SDF-based DPD for strictly noncircular sources observed by a moving array in our early work [
19], which exploits the time-domain property of noncircular signals. It can be easily adapted to the scenario of widely-separated arrays. Note that similar to the SDF-based DPD in [
18], the DPD developed in our previous work utilizes only the array responses, neglecting the location information in the propagation time between the transmitter and the observer.
In light of the aforementioned related works, in this study, we consider the scenario of widely-separated arrays and assume a line of sight (LOS) propagation of multiple signals with unknown waveforms and unknown complex attenuation at each observer array. The purpose of this study is to develop an efficient SDF-based DPD method in the frequency domain for noncircular sources. The contributions of this paper can be summarized as follows:
We derive the frequency-domain property of strictly noncircular signals and propose an improved SDF estimator. Based on this noncircular property, we establish an extended frequency-domain observation received by all arrays and compute the extended subspaces, which are implicitly related to array responses and TOAs. Fusing the extended subspaces of all frequency components, a cost function is formulated as the smallest eigenvalue of a symmetric real-valued matrix for each source location, due to a unitary transformation. Therefore, the real-valued eigen-decomposition is required instead of complex computations. Compared with the primitive SDF-based DPDs, this improved SDF estimator retains its superiority for requiring low-dimensional optimization and has higher robustness to noise that comes from exploiting noncircularity.
We devise a Newton-type iterative algorithm to efficiently solve the prescribed cost function based on matrix Eigen-perturbation theory. It substantially reduces the computations of the straightforward implementation of the optimization for each position, which is always accomplished via a two- or three-dimensional grid search.
The remainder of this paper is organized as follows.
Section 2 presents the signal model and formulates the problem. In
Section 3, we propose the extended SDF DPD estimator for noncircular sources and devise a Newton-type iterative solution. In
Section 4, we show the simulation results and make the discussion.
Section 5 concludes the study.
Throughout the paper, upper case and lower case boldface letters will represent matrices and column vectors, respectively. For convenience, we list the notations used in this paper:
| Conjugate. |
| Transpose. |
| Conjugate transpose. |
| Composition of the block diagonal matrix. |
| Composition of the diagonal matrix. |
| The “vectorization” operator that turns a matrix into a vector by stacking the columns of the matrix, one below another. |
| Kronecker matrix product. |
| Expectation. |
| Trace. |
| Real part. |
| Imaginary part. |
| The n-th element of a vector. |
| The n,m-th entry of a matrix. |
| Euclidean norm. |
| Set of the complex matrices. |
| Set of the real matrices. |
4. Results
The purpose of this section is to present the simulation results and performance analysis relying on Monte Carlo simulations. We consider the scenario of three observers located at the positions [3,3], [3,−3] and . Each observer is equipped with a uniform linear array (ULA) composed of sensors. The adjacent sensors are spaced with , where denotes the wavelength. Without loss of generality, we assume two transmitters in the field of interest. They arrive at observers with attenuation coefficient vectors being [10.94 + 0.34i,0.77 + 0.64i]T and [10.87 + 0.5i,0.77 + 0.64i]T, respectively. The baseband signal waveforms are generated as narrowband strictly noncircular signals with identical power , whose initial phases are and . The noises are uncorrelated, circularly symmetric Gaussian random variables with constant power . Unless stated otherwise, each observer collects signals in sections each of frequencies using a sample rate of 40k (samples/s). For comparison, we invoke the following five estimators:
In the simulations, the exhaustive search of DPD estimators is implemented through a coarse search with a 0.01-km resolution and then a fine search with a 0.001-km resolution. For the Newton-type iterative method, the positions are initialized using a coarse search with a 0.1-km resolution, which is capable of resolving sources, as will be shown later on. The step factor is
. Under different experimental conditions, each simulation is conducted in 1000 Monte Carlo trials, and the location root mean square error (RMSE) is used to assess the localization performance:
for the
q-th source, where
denotes the estimation of
in the
n-th Monte Carlo trial.
This section will show the performance of the proposed algorithms in seven examples. We begin with an analysis of the initial condition and the convergence performance of our Newton-type iterative method. Two near-field sources are assumed to be located at
and
, and the corresponding scenario is shown in
Figure 1. For different SNRs, we assess the inverse cost function of the proposed estimator over the candidate positions with a 0.1-km resolution.
Figure 2 displays the corresponding evaluation of the inverse cost function within a square area of
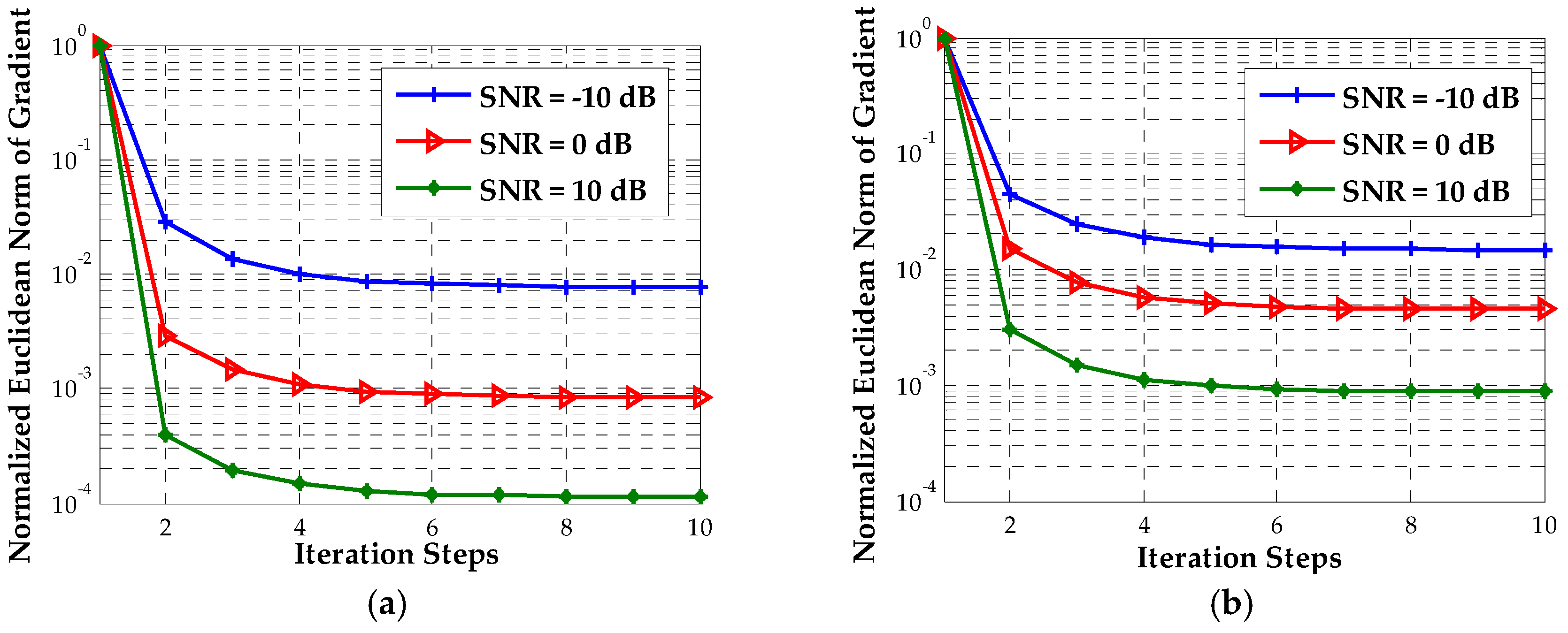
around the true positions of the two transmitters at SNR = 0 dB. It can be seen that the maximum of the inverse cost function appears near the true position of each source, and there is no pseudo peak in this area, which indicates that the coarse search with a 0.1-km resolution can provide the effective initial positions. Then, we evaluate the normalized Euclidean norm of the gradient for each source versus the number of iteration steps, when the SNR is −10 dB, 0 dB and 10 dB, respectively. As shown in
Figure 3, fewer than six iterations are required for convergence in the whole range of SNRs.
In the second example, for the simulation conditions given above, we roughly evaluate the computer running time of each of the prescribed location algorithms based on an average of 1000 estimates, when the SNR is 0 dB. The computer machine used is a ThinkPad laptop equipped with a 2.50-GHz Intel Core CPU and 8 GB RAM. The results are listed in
Table 2. To make our results as comprehensive as possible, we also implement the fine search through the Nelder–Mead simplex search approach [
29], which is a kind of local search method, and compare its average running time with that of the proposed Newton-type iterative method. We note that the complexity of our algorithm using the exhaustive grid search is larger than those of other approaches. As expected, our iterative method is the most computationally attractive among the six algorithms, and it accomplishes the location in about two thirds of the time required for the Nelder–Mead simplex search. Compared with the exhaustive search implementation, the running time of our iterative method is reduced by approximately ten times. This result agrees with the analysis in
Section 3.3.
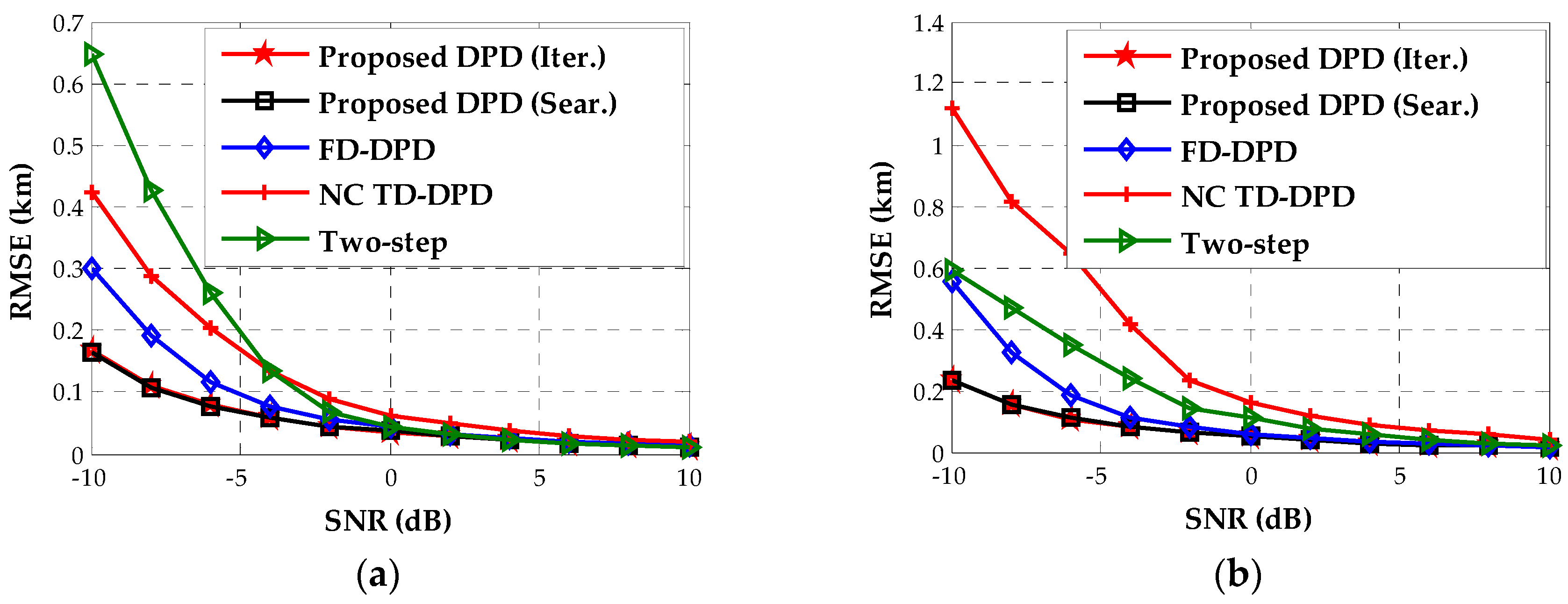
The third example will assess the accuracy of our algorithm for the near-field sources as shown in
Figure 1. We plot the RMSE curves of the proposed DPD algorithms and other positioning algorithms versus SNR in
Figure 4. It is obvious that the proposed DPD algorithms significantly outperform other comparison algorithms at low SNRs. As the SDF-based DPD in the time domain exploits only the DOA information, it exhibits the lowest accuracy even when the SNR is sufficiently high. These results indicate that both the noncircularity and the TOA information are helpful for enhancing accuracy. Furthermore, since the proposed DPD methods and two-step approach utilize the location information embedded in DOAs and TOAs for noncircular sources, the improved localization performance with respect to the traditional two-step method reveals the advantage of the DPD technique. As the RMSE curves of the proposed estimator using the Newton-type iterative method and that using Nelder–Mead simplex search overlap with each other, we provide their RMSE values in
Table 3. It can be observed that the difference of the accuracy between two methods is not more than 0.001 km.
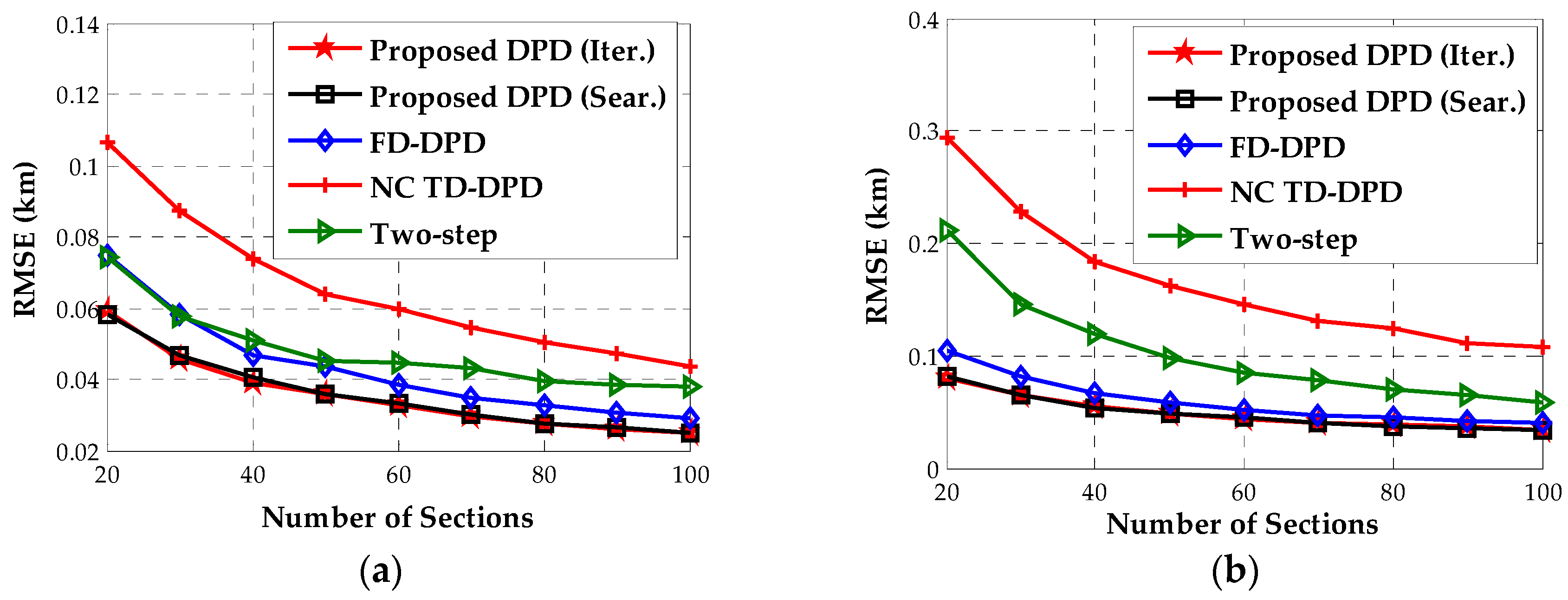
In the fourth example, we simulate the location performance with the number of sections
varying from 20 to 100 when the SNR is 0 dB. The location geometry corresponds to that in the foregoing examples. As shown in
Figure 5, the performance of our algorithm remains promising in the range of different numbers of sections. When the sample number becomes smaller, this performance improvement turns out to be more prominent.
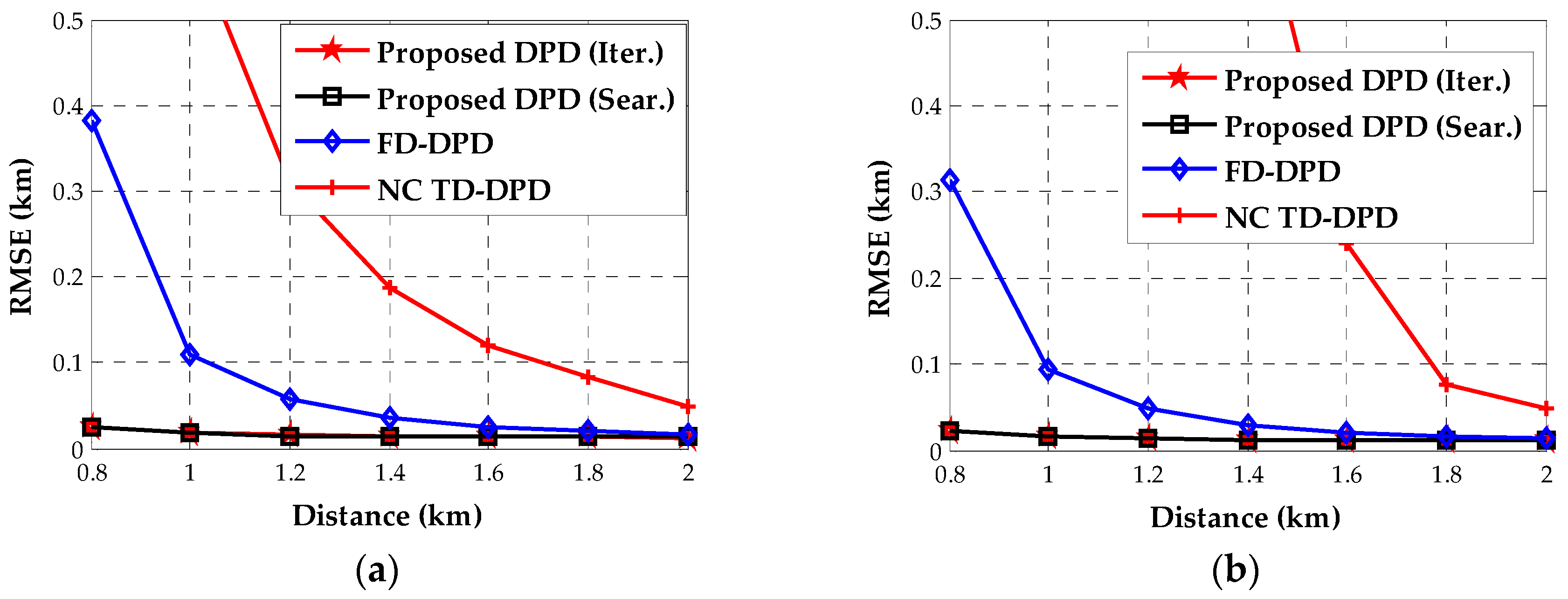
In the fifth example, we study the location accuracy when the distance between the two transmitters changes. The two transmitters are assumed to be placed at
and
, respectively. The SNR is as high as 10 dB. As
increases from 0.8 km to 2 km, we depict the RMSEs of the proposed DPDs and the existing SDF-based DPDs. Since the two-step approach can hardly separate the two transmitters with small distances, we do not show its RMSE curves. It can be seen from
Figure 6 that our algorithms performs considerably better than other DPDs when the two sources are closely located. Specifically, the SDF-based DPD in the time domain fails to localize the second transmitter in the case of
. This demonstrates that our algorithm exhibits superior resolution compared to the existing SDF-based DPDs.
In this example, we consider two far-field transmitters located at
and
as illustrated in
Figure 7. To examine the initial positions of the far-field sources obtained by the coarse search with a 0.1-km resolution, we compute the inverse cost function of the proposed estimator over the candidate positions with a grid step size of 0.1 km for different SNRs. The results for SNR = 0 dB are shown in
Figure 8. We note that the resolution of this coarse search is sufficiently high to resolve the far-field sources and thus to obtain the effective initialization.
Finally, we come to examine the running time and location accuracy of the proposed algorithms for the far-field sources as shown in
Figure 7. When the SNR is 0 dB, we evaluate the average running time of each location algorithm. The corresponding results are shown in
Table 4, which confirms that the devised iterative method is less complex than other methods. Especially, in contrast to the implementation of the Nelder–Mead simplex search, our Newton-type iterative method serves as a faster local search procedure. Under the same geometry,
Figure 9 displays the location accuracy for the two far-field sources versus SNR, indicating that the proposed algorithms still hold the lowest RMSEs. When the SNR is below 0 dB, the RMSEs of the proposed method are much lower than those of other location algorithms by at least 0.5 km. Moreover, we notice that the performance of the two-step approach (where the DOA and TOA estimations are designed for noncircular signals in the first step) is severely degraded at low SNRs, whereas it performs better than the SDF-based DPD in the frequency domain when the SNR is higher than 5 dB. Comparing this result with that in
Figure 4, we find that the exploitation of the noncircular property is more crucial to the performance enhancement for the far-field sources than for the near-field sources. Besides, we show the RMSEs of the proposed estimators using the Newton-type iterative method and using the Nelder–Mead simplex search in
Table 5. It can be seen that the accuracies of these two local search methods have no significant difference for the far-field sources.
Additionally, the results indicate that the location accuracy of the proposed DPD using the Newton-type iterative method is approximately the same as those of the Nelder–Mead simplex search and the exhaustive grid search. Considering that the running time of the Newton-type iterative method is much shorter than those of other methods (
Table 2 and
Table 4), this iterative method provides an efficient way to solve our DPD problem.













{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}