A Real-Time Reaction Obstacle Avoidance Algorithm for Autonomous Underwater Vehicles in Unknown Environments

Abstract
:1. Introduction
2. Problem Description and Formulation
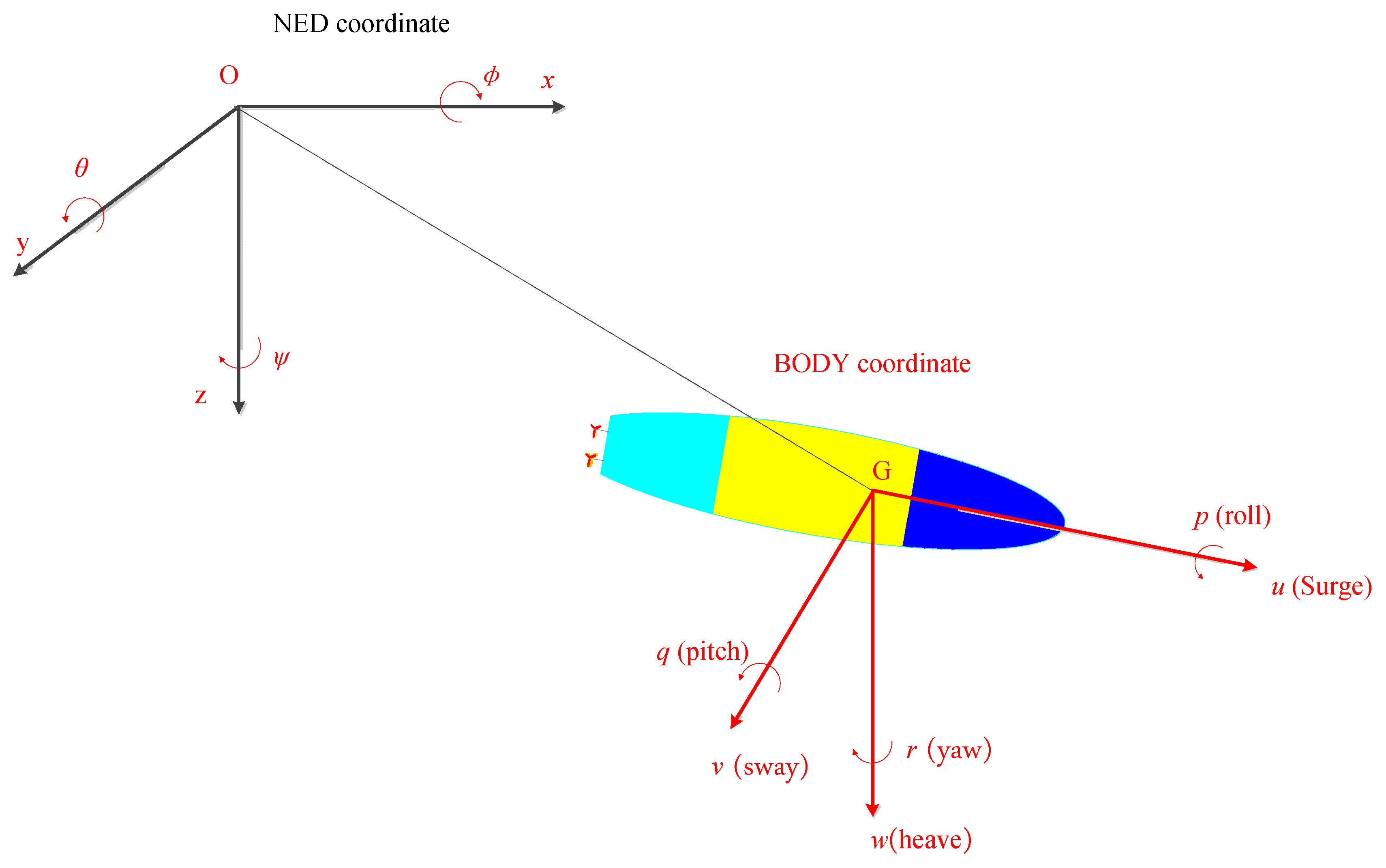
2.1. Kinematics Model
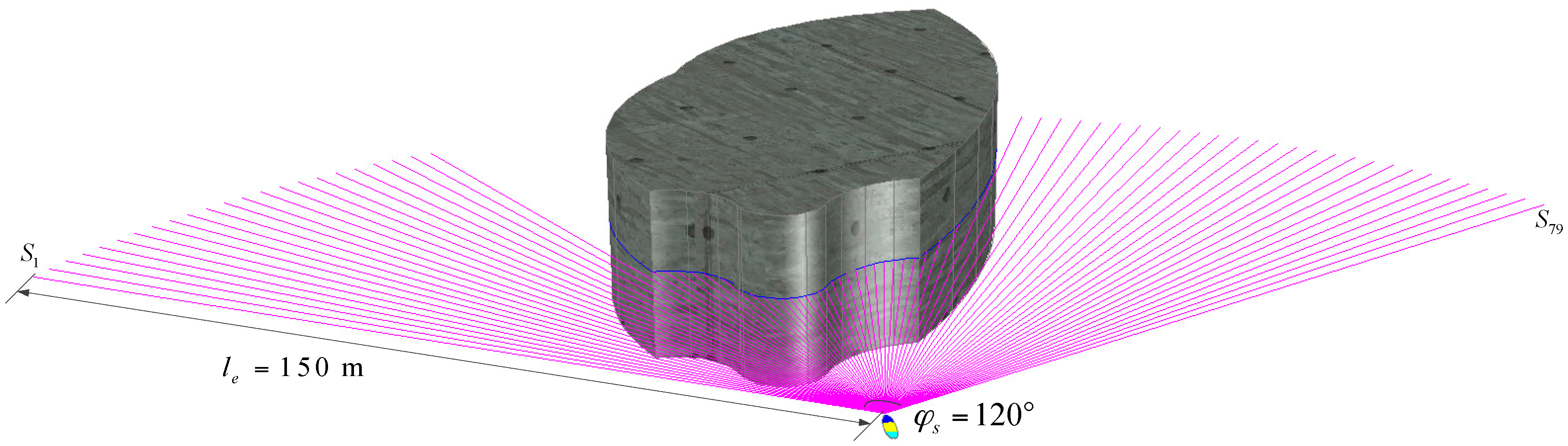
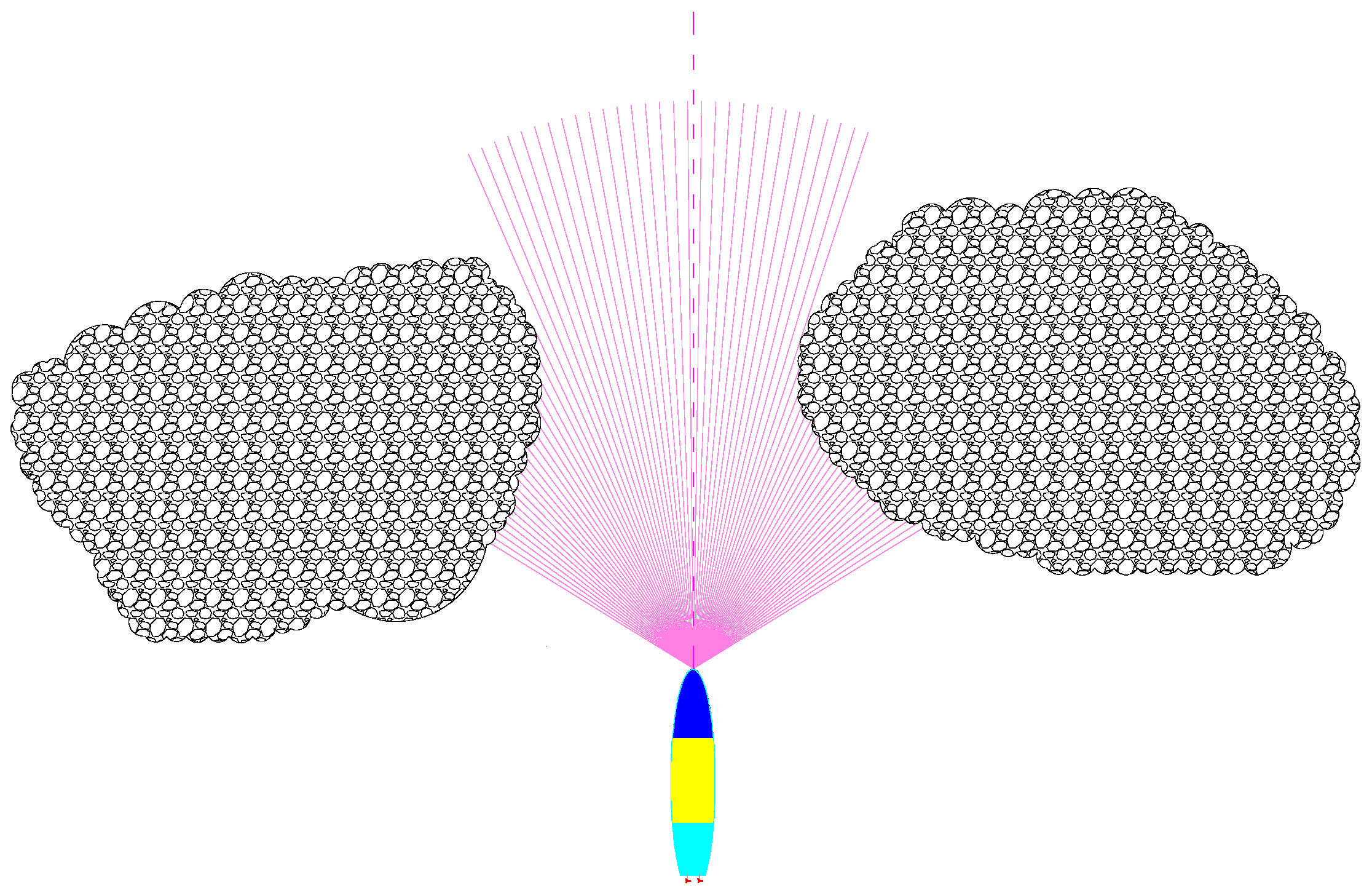
2.2. Obstacle Detection
2.3. Desirable Maximum Turning Radius Rmax
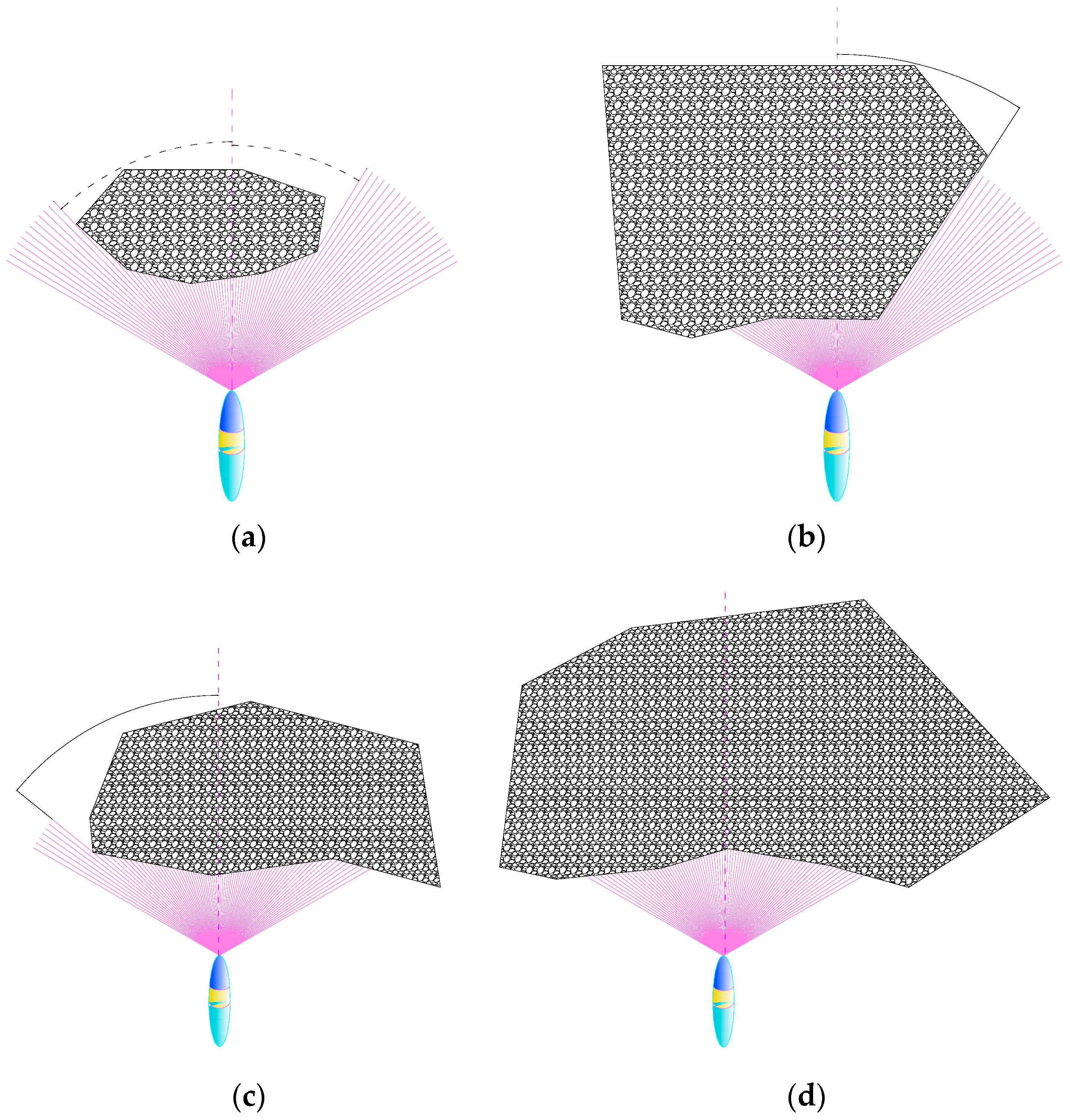
2.4. Obstacles Classification
- (a)
- If all the visible outline of obstacle is within the segment areas of FLS, it was defined as a bounded obstacle (BO).
- (b)
- If the left edges of obstacle exceed the FLS detection range, and the right ones are within the FLS detection range, it is defined as left unbounded obstacle (LUBO).
- (c)
- If the right edges of obstacle exceed the FLS detection range, and the left one is within the FLS detection range, it is defined as a right unbounded obstacle (RUBO):
- (d)
- If two sides of the obstacle exceed the FLS detection range, we define it as a unbounded obstacle (UBO).
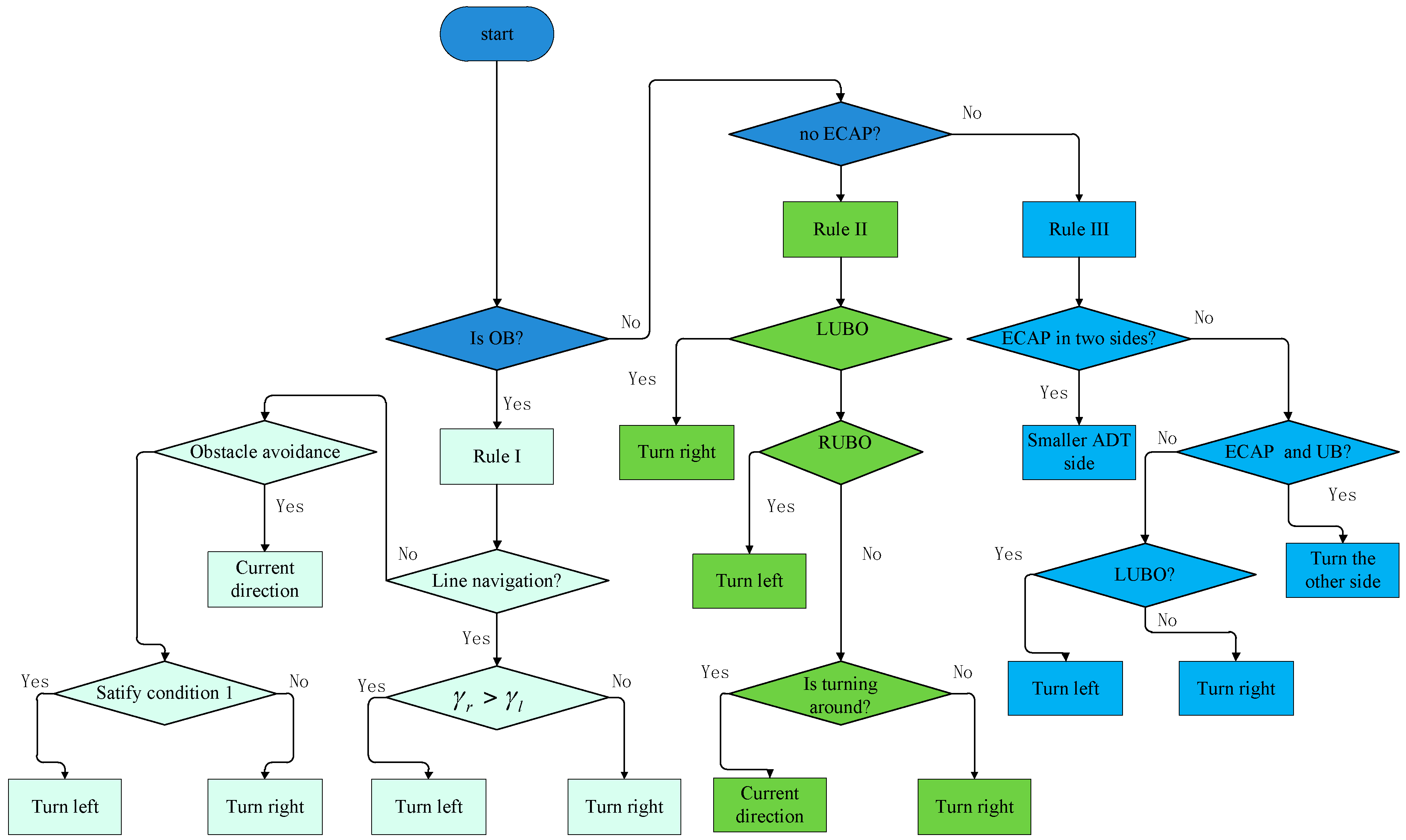
2.5. Rules of Obstacle Avoidance
2.5.1. Obstacle Avoidance Rules I
- (a)
- If the AUV is currently in line navigation, γl is the ADT when detouring around the obstacle from its left side, and γr is the ADT when detouring from the other side, and the detour direction is as follows:
- (b)
- If the AUV is currently turning around for obstacle-avoidance, keep the turn direction;
- (c)
- If AUV is currently turning around for reducing ADT, and the turning radius is Rd, the distance to target is Lv, the detour direction is as follows:where, sgn(.) is signum function, is constant coefficient.
2.5.2. Obstacle Avoidance Rules II
- (a)
- If the obstacle is LUBO, detour around obstacles from the right side.
- (b)
- If the obstacle is RUBO, detour around obstacles from the left side.
- (c)
- If the obstacle is UBO, and the AUV is turning around, keeping the turn direction, detour around obstacles from the left side; otherwise, detour around obstacles from the right side.
2.5.3. Obstacle Avoidance Rules III
- (a)
- If one side of the obstacle is unbounded and exists in ECAP, there is no ECAP on the other side, detour around the other side;
- (b)
- If ECAP only exist on one side of the obstacle and this side is bounded, and the other one is unbounded, select the former as the detour direction;
- (c)
- If ECAP exist on both sides of obstacle, choose the direction to detour from which the ADT is smaller.
2.5.4. Path Update Principle
3. Obstacle Avoidance Algorithms
3.1. Reaction Obstacle Avoidance
- (a)
- Directly drive to the target: when the AUV is passing a certain position, FLS doesn’t detect any obstacles, or detect obstacles which are on the flank of the AUV and the target (or next waypoint) is in the other side, the heading angle is adjusted to the target (or next waypoint) immediately.
- (b)
- Keep a safe distance: obstacles are detected on the side of the AUV, so if driving to the target directly, the AUV will collide with obstacles or the safety distance margin isn’t enough, then AUV keeps safe distance from obstacles and decreases the ADT if possible, which makes the AUV drive parallel with the edges of obstacle’s outline.
- (c)
- Solo obstacle avoidance: if by keeping the current posture, the AUV will collide with obstacles, then the heading angle must be adjusted to avoid colliding, the detour direction is chosen by the aforementioned rules, reducing the navigation speed if necessary.
- (d)
- Cluttered obstacle avoidance: when one of obstacles has entered the 80 m range of AUV in a cluttered environment, this manner is activated, and the AUV selects an appropriate passage between obstacles considering comprehensive factors such as ADT, the width of the passage, and the unobstructed character from the spot of FLS. The AUV keeps a safe distance with the obstacles on the sides of passages, if the passage is wide enough, decreasing the ADT as far as possible.
- (e)
- Walk along the wall: if encountering UBO or gallery terrain, the AUV navigates parallel to the edges of the obstacle’s outline until there is no obstacle hampering the AUV from directly driving to the target. During the whole process of walking along wall, some obstacle points need to be saved at intervals as a judgement criterion for terminating this manner. The details will be described in Section 3.4.
3.2. Obstacles Outline Disposition
3.2.1. FLS Detection Data Grouping
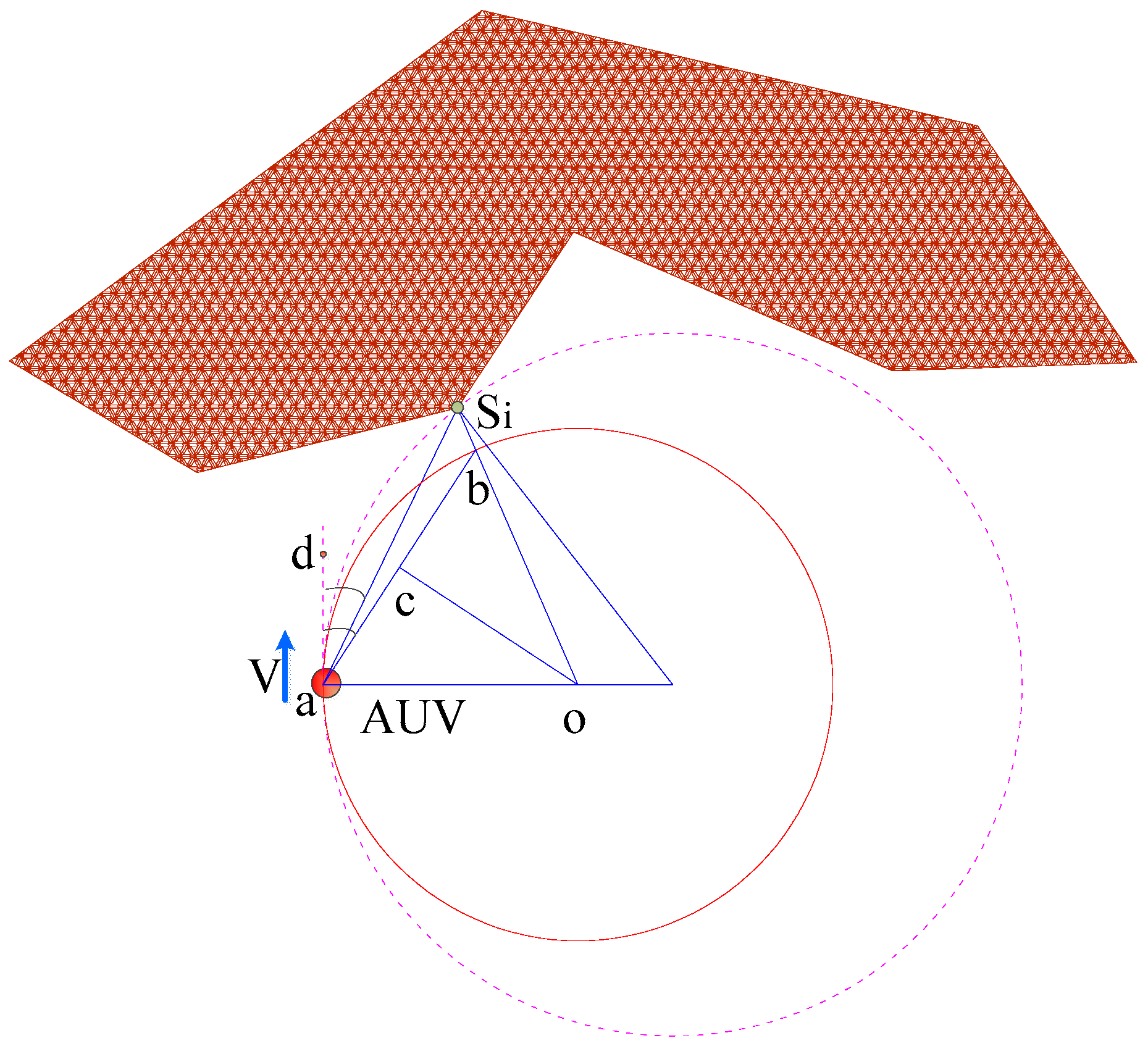
3.2.2. Largest Polar Angle Algorithm
- Step 1:
- Take grouped data to generate sonar beams (purple line) and generate obstacle points;
- Step 2:
- Line up obstacle points one by one to produce a detected obstacle outline (black line), choose the rightmost border point (point A) as the starting point, connect it with others points on the left of it;
- Step 3:
- Find an obstacle point as point B, which satisfies the condition that the polar angle of line AB is larger than those of other points aligned with point A. The polar angle value range is [0°, 360°), which is taken as positive in the anti-clockwise sense without loss of generality;
- Step 4:
- Take the point found in step 3 as the new starting point, repeat step 1 and step 2 to find the next point (point C, D, …) until the leftmost border point is picked out;
- Step 5:
- Align points A, B, … in sequence. The blue line ABCDE is the disposed result.
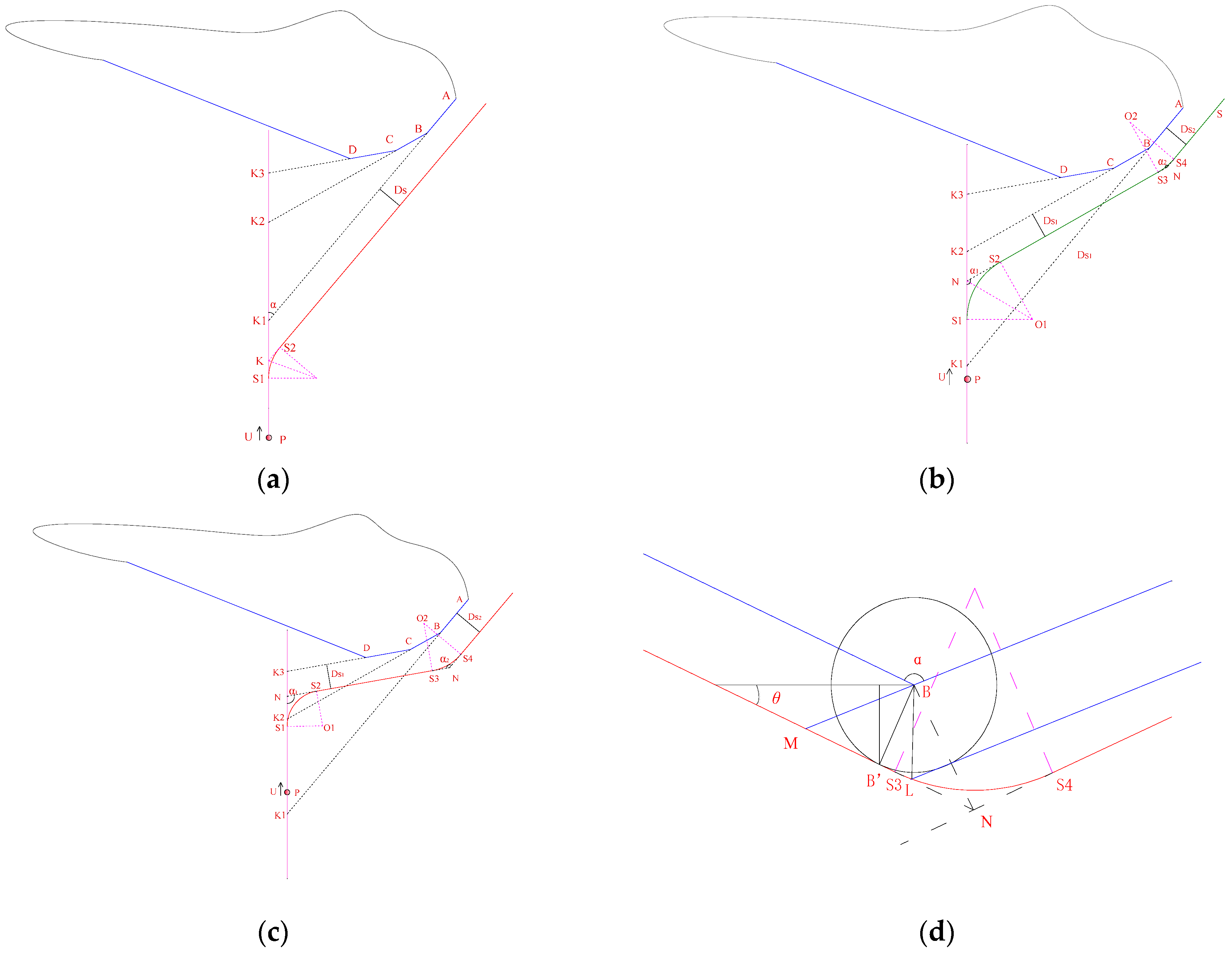
3.3. Path Design for Single Obstacle
- Step 1:
- Find out the intersection k1 between line AB and AUV track line, calculating the length of line segment Pk1.
- Step 2:
- Calculate :where, is the response time of the obstacle-avoidance system, U is the speed of AUV, is the smallest turning radius of AUV, is safe distance, take
- Step 3:
- If is negative, turn to step 8, otherwise, calculate :where, is the largest turning radius for AUV.
- Step 4:
- If is non-negative, parallel translation AK1, and intersect AUV track line at point K, , design a transition point S1 as beginning position of steering, which satisfies:
- Step 5:
- If is negative, the turning radius R and transition point S1 satisfies:
- Step 6:
- Design a transition point S2 as the steering end position, where the heading angle of the AUV satisfies:where, is the current heading angle of AUV, is the heading angle when AUV is arriving at S1.
- Step 7:
- End
- Step 8:
- Replace the current line segment with the next line segment (such as: line BC instead of line AB), which is displayed in Figure 8b,c, repeat steps 1–6;
- Step 9:
- Step 10:
- If and is nonnegative, take , and replacing S3 with :The turning radius R satisfies:
- Step 11:
- Else, take turning radius R = Rmin, and point S3 satisfies:
- Step 12:
- Design a transition point S4 as steering end position, where the heading angle of the AUV satisfies:where, is the heading angle before the AUV arrives at S3.
- Step 13:
- Turn to step 7.
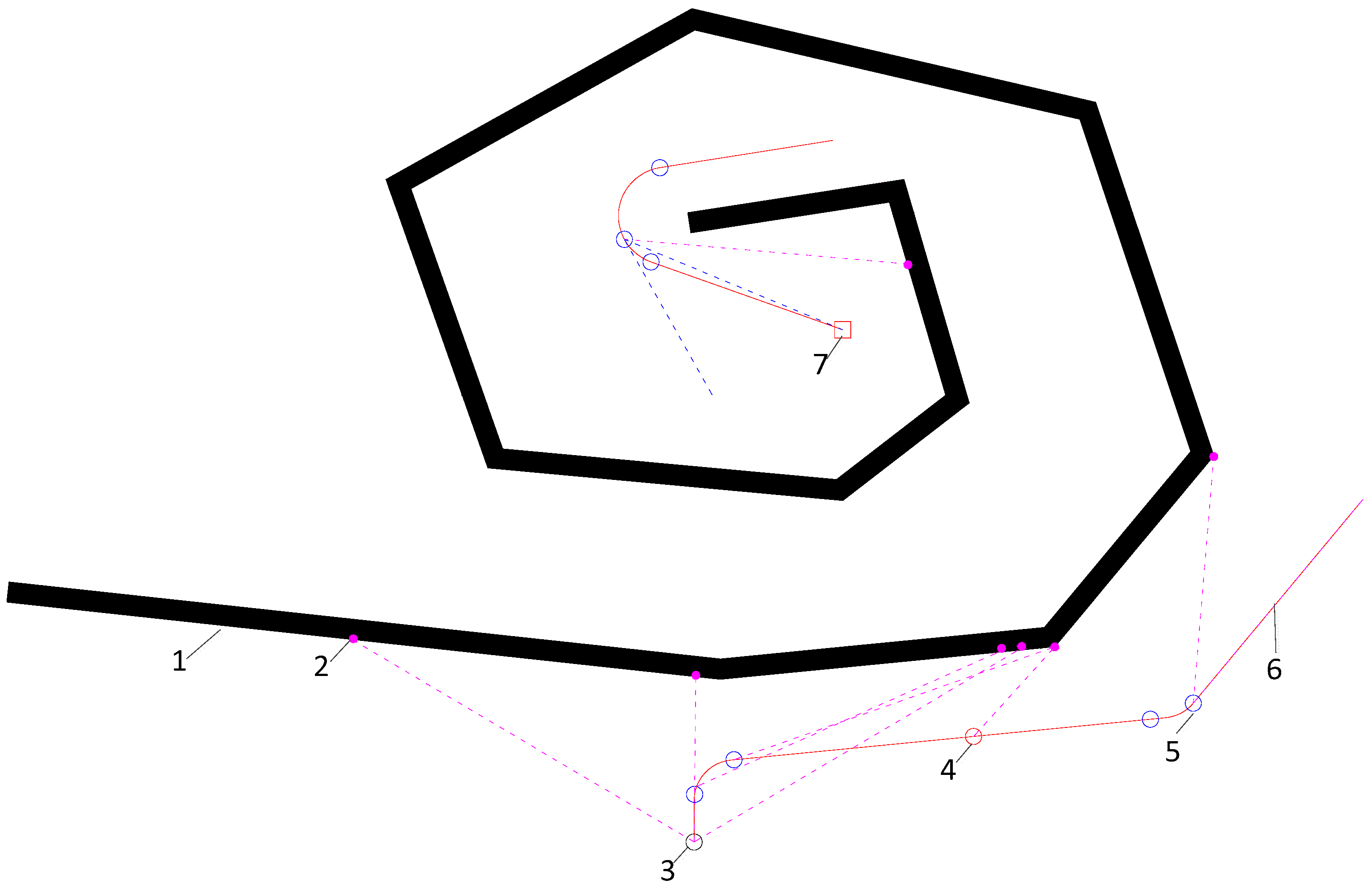
3.4. Wall-Form Obstacles
3.5. Clutter Obstacles Environment
- (a)
- If the width of gap is smaller than 8 Lo, choosing the midpoint of the gap as waypoint;
- (b)
- If the width of gap is larger than 8 Lo, choosing the point as waypoint where the ADT is the least and the distance from AUV to two border points of the gap is larger than 4 Lo.
4. Simulation Results and Discussion
4.1. Simulation
4.2. Discussion
5. Conclusions and Future Work
Acknowledgments
Author Contributions
Conflicts of Interest
References
- Yan, Z.P.; Yu, H.M.; Zhang, W.; Li, B.Y.; Zhou, J.J. Globally Finite-Time Stable Tracking Control of Underactuated UUVs. Ocean Eng. 2015, 107, 132–146. [Google Scholar] [CrossRef]
- Xiang, X.B.; Yu, C.Y.; Niu, Z.M.; Zhang, Q. Subsea Cable Tracking by Autonomous Underwater Vehicle with Magnetic Sensing Guidance. Sensors 2016, 16, 1335. [Google Scholar] [CrossRef] [PubMed]
- Zeng, Z.; Lammas, A.; Sammut, K.; He, F.P.; Tang, Y.H. Shell Space Decomposition based Path Planning for AUVs Operating in a Variable Environment. Ocean Eng. 2014, 91, 181–195. [Google Scholar] [CrossRef]
- Bi, F.Y.; Wei, Y.J.; Zhang, J.Z.; Cao, W. Position-Tracking Control of Underactuated Autonomous Underwater Vehicles in the Presence of Unknown Ocean Currents. IET Control Theory Appl. 2010, 4, 2369–2380. [Google Scholar] [CrossRef]
- Cai, W.; Zhang, M.Y.; Zheng, Y.R. Task Assignment and Path Planning for Multiple Autonomous Underwater Vehicles Using 3D Dubins Curves. Sensors 2017, 17, 1607. [Google Scholar] [CrossRef] [PubMed]
- Saravanakumar, S.; Asokan, T. Multipoint Potential Field Method for Path Planning of Autonomous Underwater Vehicles in 3D Space. Intell. Serv. Robot. 2013, 6, 211–224. [Google Scholar] [CrossRef]
- Kovács, B.; Szayer, G.; Tajti, F.; Burdelis, M.; Korondi, P. A Novel Potential Field Method for Path Planning of Mobile Robots by Adapting Animal Motion Attributes. Robot. Auton. Syst. 2016, 82, 24–34. [Google Scholar] [CrossRef]
- Lee, S.M.; Myun, H. Receding Horizon Particle Swarm Optimisation-Based Formation Control with Collision Avoidance for Non-Holonomic Mobile Robots. IET Control Theory Appl. 2015, 9, 2075–2083. [Google Scholar] [CrossRef]
- Dadgar, M.; Jafari, S.; Hamzeh, A. A PSO-Based Multi-Robot Cooperation Method for Target Searching in Unknown Environments. Neurocomputing 2016, 177, 62–74. [Google Scholar] [CrossRef]
- Bui, L.D.; Kim, Y.G. An Obstacle-Avoidance Technique for Autonomous Underwater Vehicles Based on BK-Products of Fuzzy relation. Fuzzy Sets Syst. 2006, 157, 560–577. [Google Scholar] [CrossRef]
- Nakhaeinia, D.; Karasfi, B. A Behavior-Based Approach for Collision Avoidance of Mobile Robots in Unknown and Dynamic Environments. Intell. Fuzzy Syst. 2013, 24, 299–311. [Google Scholar]
- Lee, Y.I.; Kim, Y.G.; Kohout, L.J. An Intelligent Collision Avoidance System for AUVs Using Fuzzy Relational Products. Inf. Sci. 2004, 158, 209–232. [Google Scholar] [CrossRef]
- Liu, Y.C.; Liu, S.Y.; Wang, N. Fully-Tuned Fuzzy Neural Network based Robust Adaptive Tracking Control of Unmanned Underwater Vehicle with thruster Dynamics. Neurocomputering 2016, 196, 1–13. [Google Scholar] [CrossRef]
- Pothal, J.K.; Parhi, D.R. Navigation of Multiple Mobile Robots in a Highly Clutter Terrains Using Adaptive Neuro-Fuzzy Inference System. Robot. Auton. Syst. 2015, 72, 48–58. [Google Scholar] [CrossRef]
- Zhu, D.Q.; Sun, B. The Bio-Inspired Model Based Hybrid Sliding-Mode Tracking Control for Unmanned Underwater Vehicles. Eng. Appl. Artif. Intell. 2013, 26, 2260–2269. [Google Scholar] [CrossRef]
- Zeng, Z.; Sammutb, K.; Lian, L.; He, F.P.; Lammas, A.; Tang, Y.H. A Comparison of Optimization Techniques for AUV Path Planning in Environments with Ocean Currents. Robot. Auton. Syst. 2016, 82, 61–72. [Google Scholar] [CrossRef]
- Conti, R.; Meli, E.; Ridolfi, A.; Allotta, B. An Innovative Decentralized Strategy for I-AUVs Cooperative Manipulation Tasks. Robot. Auton. Syst. 2015, 72, 261–276. [Google Scholar] [CrossRef]
- Zeng, Z.; Sammut, K.; Lammas, A.; He, F.B.; Tang, Y.H. Imperialist Competitive Algorithm for AUV Path Planning in a Variable Ocean. Appl. Artif. Intell. 2015, 29, 402–420. [Google Scholar] [CrossRef]
- Das, P.K.; Behera, H.S.; Das, S.; Tripathy, H.K.; Panigrahi, B.K.; Pradhan, S.K. A Hybrid Improved PSO-DV Algorithm for Multi-Robot Path Planning in a Clutter Environment. Neurocomputing 2016, 207, 735–753. [Google Scholar] [CrossRef]
- Aghababa, M.P. 3D Path Planning for Underwater Vehicles Using Five Evolutionary Optimization Algorithms Avoiding Static and Energetic Obstacles. Appl. Ocean Res. 2012, 38, 48–62. [Google Scholar] [CrossRef]
- Fang, M.C.; Wang, S.M.; Wu, M.C.; Lin, Y.H. Applying the Self-Tuning Fuzzy Control with the Image Detection Technique on the Obstacle-Avoidance for Autonomous Underwater Vehicles. Ocean Eng. 2015, 93, 11–24. [Google Scholar] [CrossRef]
- Shojaei, K.; Arefi, M.M. On the Neuro-Adaptive Feedback Linearising Control of Underactuated Autonomous Underwater Vehicles in Three-Dimensional Space. IET Control Theory Appl. 2015, 9, 1264–1273. [Google Scholar] [CrossRef]
- Fossen, T.I.; Sagatun, S.I. Adaptive Control of Nonlinear Systems: A Case Study of Underwater Robotic Systems. J. Robot. Syst. 1991, 8, 393–412. [Google Scholar] [CrossRef]
- Norgren, P.; Skjetne, R. Line-of-Sight iceberg Edge-Following Using an AUV Equipped With Multibeam Sonar. In Proceedings of the 2015 16th IFAC on Technology, Culture and International Stability, Sozopos, Bulgaria, 24–27 September 2015; pp. 81–88. [Google Scholar]















{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
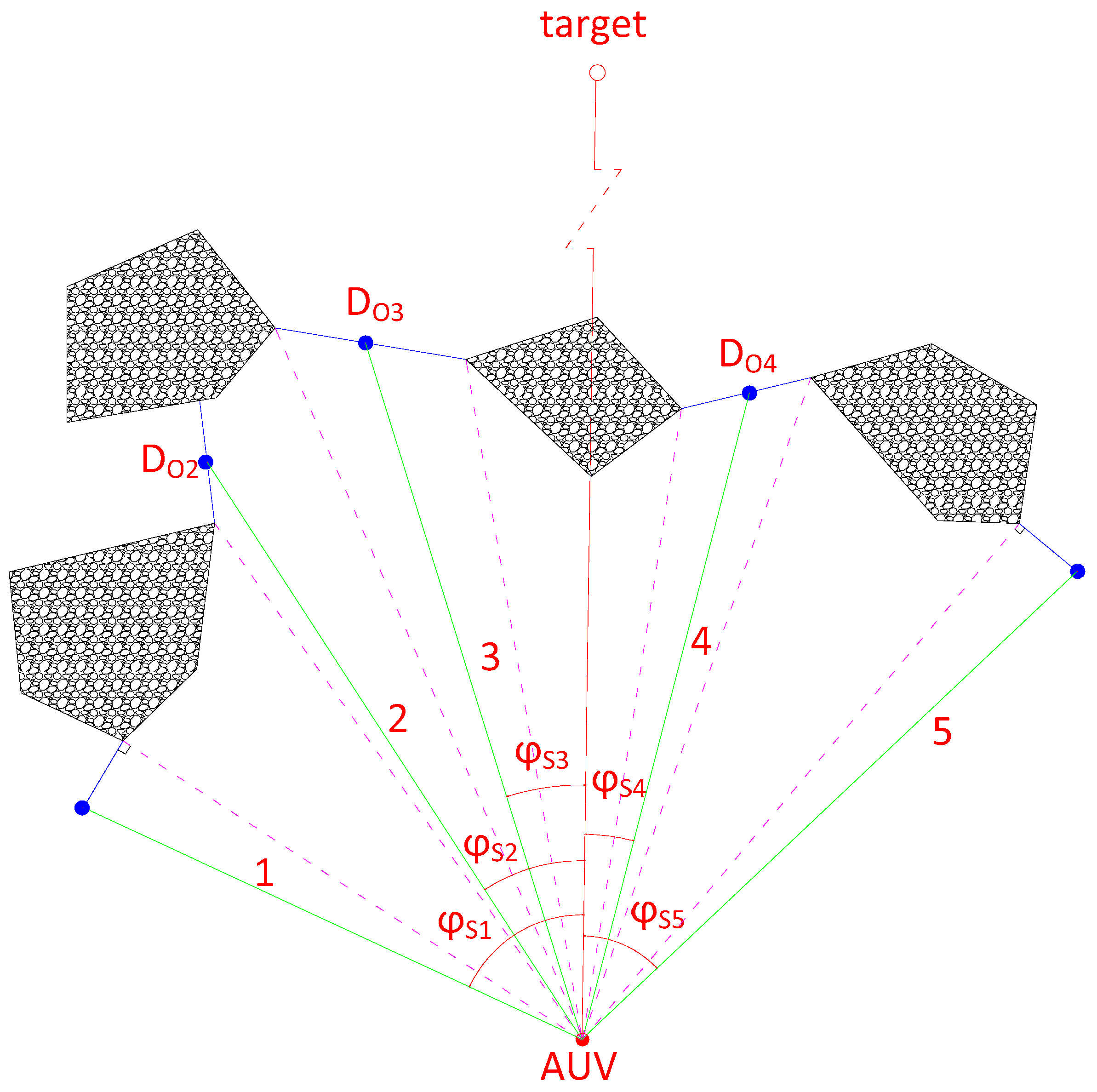
| λo | Do (Lo) | Φd (°) | Pd | λb | λc | |
|---|---|---|---|---|---|---|
| Path1 | 1 | ∞ | 66 | 38.1 | 1 | 4.31 |
| Path2 | 0.84 | 9.6 | 34 | 47.5 | 0.5 | 2.36 |
| Path3 | 1 | 14.2 | 18 | 51.9 | 1 | 9.36 |
| Path4 | 0.81 | 9.2 | 14 | 46.5 | 1 | 10.76 |
| Path5 | 1 | ∞ | 43 | 47.4 | 1 | 4.64 |
© 2018 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Yan, Z.; Li, J.; Zhang, G.; Wu, Y. A Real-Time Reaction Obstacle Avoidance Algorithm for Autonomous Underwater Vehicles in Unknown Environments. Sensors 2018, 18, 438. https://doi.org/10.3390/s18020438
Yan Z, Li J, Zhang G, Wu Y. A Real-Time Reaction Obstacle Avoidance Algorithm for Autonomous Underwater Vehicles in Unknown Environments. Sensors. 2018; 18(2):438. https://doi.org/10.3390/s18020438
Chicago/Turabian StyleYan, Zheping, Jiyun Li, Gengshi Zhang, and Yi Wu. 2018. "A Real-Time Reaction Obstacle Avoidance Algorithm for Autonomous Underwater Vehicles in Unknown Environments" Sensors 18, no. 2: 438. https://doi.org/10.3390/s18020438
APA StyleYan, Z., Li, J., Zhang, G., & Wu, Y. (2018). A Real-Time Reaction Obstacle Avoidance Algorithm for Autonomous Underwater Vehicles in Unknown Environments. Sensors, 18(2), 438. https://doi.org/10.3390/s18020438