Linear Feature Projection-Based Sensory Event Detection from the Multiunit Activity of Dorsal Root Ganglion Recordings


Abstract
:1. Introduction
2. Materials and Methods
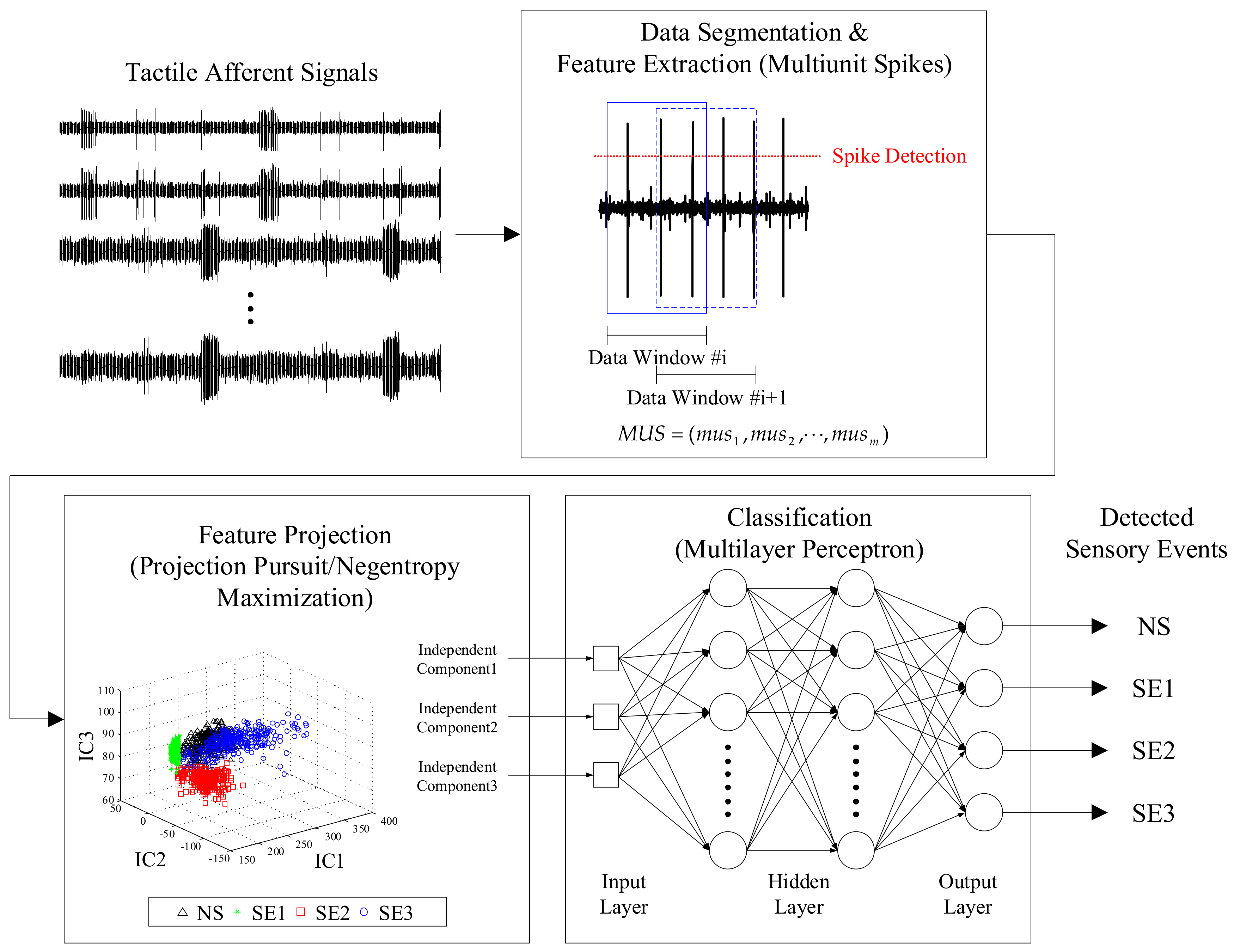
2.1. Signal Processing Procedure
2.2. Sensory Event Application and Tactile Afferent Signal Recording
2.3. Data Segmentation
2.4. Feature Extraction
2.5. Feature Projection
2.6. Classification
2.7. Performance Evaluation
3. Results and Discussion
3.1. Properties of Recorded Tactile Afferent Signals
3.2. Comparison of Various Feature Projection Methods
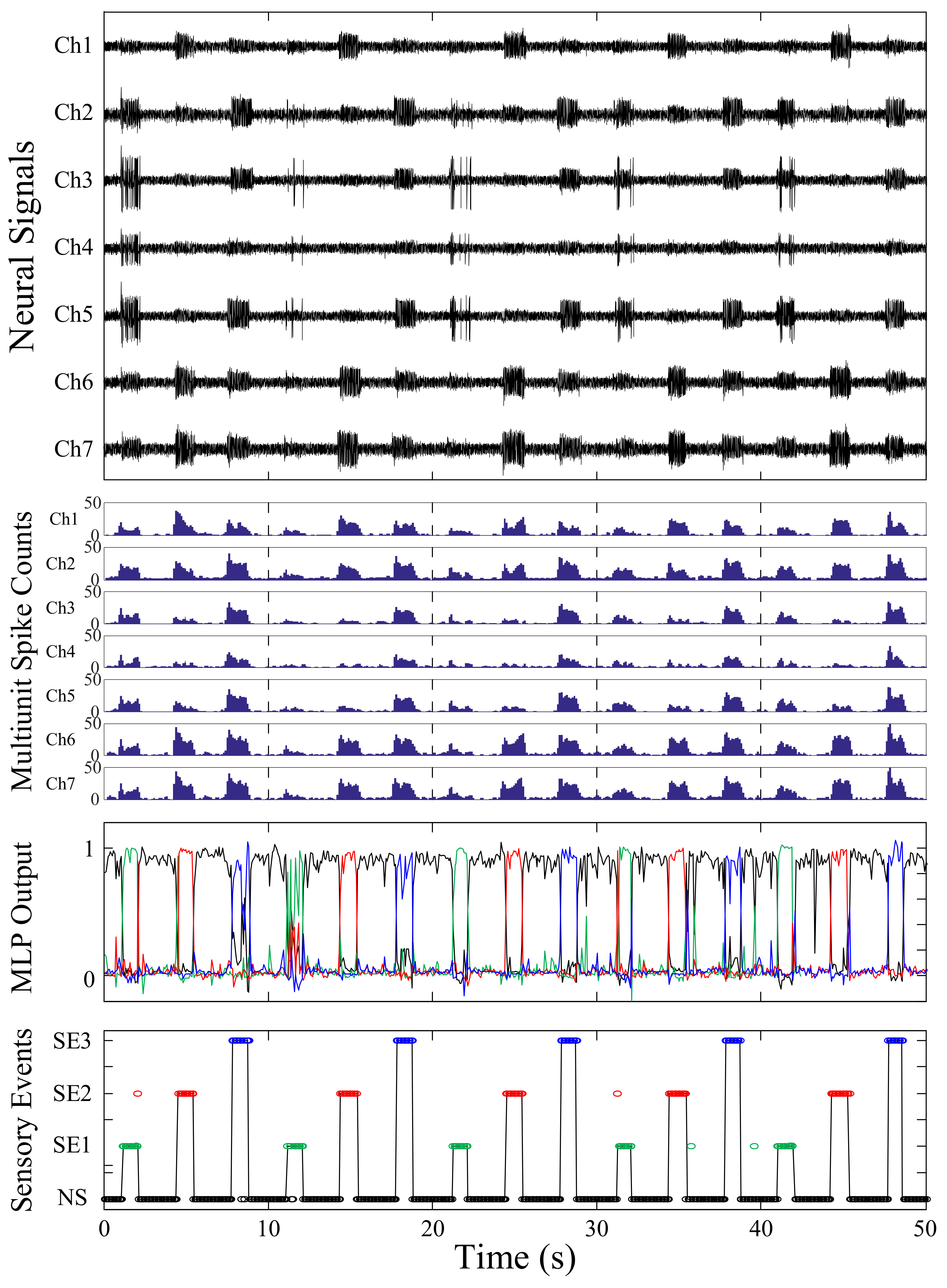
3.3. Performance Evaluation of the Proposed Method
4. Conclusions
Acknowledgments
Author Contributions
Conflicts of Interest
References
- Wolpert, D.M.; Ghahramani, Z. Computational principles of movement neuroscience. Nat. Neurosci. 2000, 3, 1212–1217. [Google Scholar] [CrossRef] [PubMed]
- Peckham, P.H.; Knutson, J.S. Functional electrical stimulation for neuromuscular applications. Annu. Rev. Biomed. Eng. 2005, 7, 327–360. [Google Scholar] [CrossRef] [PubMed]
- Lynch, C.L.; Popovic, M.R. Functional electrical stimulation. IEEE Control Syst. Mag. 2008, 28, 40–50. [Google Scholar] [CrossRef]
- Raspopovic, S.; Carpaneto, J.; Udina, E.; Navarro, X.; Micera, S. On the identification of sensory information from mixed nerves by using single-channel cuff electrodes. J. Neuroeng. Rehabil. 2010, 7, 17. [Google Scholar] [CrossRef] [PubMed]
- Han, S.; Chu, J.U.; Kim, H.; Choi, K.; Park, J.W.; Youn, I. An Unsorted Spike-Based Pattern Recognition Method for Real-Time Continuous Sensory Event Detection from Dorsal Root Ganglion Recording. IEEE Trans. Biomed. Eng. 2016, 63, 1310–1320. [Google Scholar] [CrossRef] [PubMed]
- Weber, D.J.; Stein, R.B.; Everaert, D.G.; Prochazka, A. Limb-state feedback from ensembles of simultaneously recorded dorsal root ganglion neurons. J. Neural Eng. 2007, 4, S168. [Google Scholar] [CrossRef] [PubMed]
- Rigosa, J.; Weber, D.J.; Prochazka, A.; Stein, R.B.; Micera, S. Neuro-fuzzy decoding of sensory information from ensembles of simultaneously recorded dorsal root ganglion neurons for functional electrical stimulation applications. J. Neural Eng. 2011, 8, 046019. [Google Scholar] [CrossRef] [PubMed]
- Umeda, T.; Watanabe, H.; Sato, M.A.; Kawato, M.; Isa, T.; Nishimura, Y. Decoding of the spike timing of primary afferents during voluntary arm movements in monkeys. Front. Neurosci. 2014, 8, 97. [Google Scholar] [CrossRef] [PubMed]
- Burns, S.P.; Xing, D.; Shapley, R.M. Comparisons of the dynamics of local field potential and multiunit activity signals in macaque visual cortex. J. Neurosci. 2010, 30, 13739–13749. [Google Scholar] [CrossRef] [PubMed]
- Rey, H.G.; Pedreira, C.; Quiroga, R.Q. Past, present and future of spike sorting techniques. Brain Res. Bull. 2015, 119 Pt B, 106–117. [Google Scholar] [CrossRef] [PubMed]
- Stark, E.; Abeles, M. Predicting movement from multiunit activity. J. Neurosci. 2007, 27, 8387–8394. [Google Scholar] [CrossRef] [PubMed]
- Fraser, G.W.; Chase, S.M.; Whitford, A.; Schwartz, A.B. Control of a brain-computer interface without spike sorting. J. Neural Eng. 2009, 6, 055004. [Google Scholar] [CrossRef] [PubMed]
- Han, S.; Chu, J.U.; Kim, H.; Park, J.W.; Youn, I. Multiunit Activity-Based Real-Time Limb-State Estimation from Dorsal Root Ganglion Recordings. Sci. Rep. 2017, 7, 44197. [Google Scholar] [CrossRef] [PubMed]
- Chu, J.U.; Moon, I.; Mun, M.S. A real-time EMG pattern recognition system based on linear-nonlinear feature projection for a multifunction myoelectric hand. IEEE Trans. Biomed. Eng. 2006, 53, 2232–2239. [Google Scholar] [PubMed]
- Chu, J.U.; Song, K.I.; Han, S.; Lee, S.H.; Kang, J.Y.; Hwang, D.; Suh, J.K.; Choi, K.; Youn, I. Gait phase detection from sciatic nerve recordings in functional electrical stimulation systems for foot drop correction. Physiol. Meas. 2013, 34, 541–565. [Google Scholar] [CrossRef] [PubMed]
- Churchland, M.M.; Cunningham, J.P.; Kaufman, M.T.; Foster, J.D.; Nuyujukian, P.; Ryu, S.I.; Shenoy, K.V. Neural population dynamics during reaching. Nature 2012, 487, 51–56. [Google Scholar] [CrossRef] [PubMed]
- Puigdellivol-Sanchez, A.; Prats-Galino, A.; Ruano-Gil, D.; Molander, C. Sciatic and femoral nerve sensory neurones occupy different regions of the L4 dorsal root ganglion in the adult rat. Neurosci. Lett. 1998, 251, 169–172. [Google Scholar] [CrossRef] [Green Version]
- Tesfayesus, W.; Durand, D.M. Blind source separation of peripheral nerve recordings. J. Neural Eng. 2007, 4, S157. [Google Scholar] [CrossRef] [PubMed]
- Decosterd, I.; Woolf, C.J. Spared nerve injury: An animal model of persistent peripheral neuropathic pain. Pain 2000, 87, 149–158. [Google Scholar] [CrossRef]
- Englehart, K.; Hudgins, B. A robust, real-time control scheme for multifunction myoelectric control. IEEE Trans. Biomed. Eng. 2003, 50, 848–854. [Google Scholar] [CrossRef] [PubMed]
- Micera, S.; Carpaneto, J.; Raspopovic, S. Control of hand prostheses using peripheral information. IEEE Rev. Biomed. Eng. 2010, 3, 48–68. [Google Scholar] [CrossRef] [PubMed]
- Gibson, S.; Judy, J.W.; Markovi, D. Spike Sorting: The first step in decoding the brain. IEEE Signal Proc. Mag. 2012, 29, 124–143. [Google Scholar] [CrossRef]
- Hyvarinen, A. Fast and robust fixed-point algorithms for independent component analysis. IEEE Trans. Neural Netw. 1999, 10, 626–634. [Google Scholar] [CrossRef] [PubMed]
- Kim, K.H.; Kim, S.J. Method for unsupervised classification of multiunit neural signal recording under low signal-to-noise ratio. IEEE Trans. Biomed. Eng. 2003, 50, 421–431. [Google Scholar] [PubMed]
- Kohonen, T. The Self-Organizing Map. Proc. IEEE 1990, 78, 1464–1480. [Google Scholar] [CrossRef]
- Johansson, R.S.; Flanagan, J.R. Coding and use of tactile signals from the fingertips in object manipulation tasks. Nat. Rev. Neurosci. 2009, 10, 345–359. [Google Scholar] [CrossRef] [PubMed]
- Chu, J.U.; Moon, I.; Lee, Y.J.; Kim, S.K.; Mun, M.S. A supervised feature-projection-based real-time EMG pattern recognition for multifunction myoelectric hand control. IEEE-ASME Trans. Mechatron. 2007, 12, 282–290. [Google Scholar] [CrossRef]
- Ethier, C.; Oby, E.R.; Bauman, M.J.; Miller, L.E. Restoration of grasp following paralysis through brain-controlled stimulation of muscles. Nature 2012, 485, 368–371. [Google Scholar] [CrossRef] [PubMed]
- Herzfeld, D.J.; Beardsley, S.A. Improved multi-unit decoding at the brain-machine interface using population temporal linear filtering. J. Neural Eng. 2010, 7, 046012. [Google Scholar] [CrossRef] [PubMed]
- Prochazka, A. Proprioceptor Models. In Encyclopedia of Computational Neuroscience; Springer: New York, NY, USA, 2015; pp. 2501–2518. [Google Scholar]
- Prochazka, A.; Ellaway, P. Sensory systems in the control of movement. Compr. Physiol. 2012, 2, 2615–2627. [Google Scholar] [PubMed]





{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Rat | Number of Recording Channels |
|---|---|
| A | 6 |
| B | 7 |
| C | 8 |
| D | 7 |
| E | 8 |
| Rat | PP/NEM | PCA | SOFM |
|---|---|---|---|
| A | 91.15 | 89.41 | 85.17 |
| B | 90.58 | 88.06 | 86.10 |
| C | 95.75 | 92.17 | 89.91 |
| D | 92.00 | 85.94 | 83.33 |
| E | 93.08 | 90.75 | 87.41 |
| Mean ± SD | 92.51 ± 2.04 | 89.27 ± 2.41 | 86.38 ± 2.47 |
| Sensory Events | A | B | C | D | E |
|---|---|---|---|---|---|
| SE1 | 90.83 | 90.32 | 95.83 | 91.61 | 93.33 |
| SE2 | 91.08 | 90.13 | 95.77 | 92.13 | 92.64 |
| SE3 | 90.75 | 90.26 | 94.73 | 92.05 | 93.03 |
| NS | 91.92 | 91.62 | 96.67 | 92.21 | 93.33 |
| Mean ± SD | 92.51 ± 2.04 |
| Processes | Processing Time (ms) |
|---|---|
| MUS | 2.73 |
| PP/NEM | 1.30 |
| MLP | 5.12 |
| Total | 9.15 |
© 2018 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Han, S.; Youn, I. Linear Feature Projection-Based Sensory Event Detection from the Multiunit Activity of Dorsal Root Ganglion Recordings. Sensors 2018, 18, 1002. https://doi.org/10.3390/s18041002
Han S, Youn I. Linear Feature Projection-Based Sensory Event Detection from the Multiunit Activity of Dorsal Root Ganglion Recordings. Sensors. 2018; 18(4):1002. https://doi.org/10.3390/s18041002
Chicago/Turabian StyleHan, Sungmin, and Inchan Youn. 2018. "Linear Feature Projection-Based Sensory Event Detection from the Multiunit Activity of Dorsal Root Ganglion Recordings" Sensors 18, no. 4: 1002. https://doi.org/10.3390/s18041002
APA StyleHan, S., & Youn, I. (2018). Linear Feature Projection-Based Sensory Event Detection from the Multiunit Activity of Dorsal Root Ganglion Recordings. Sensors, 18(4), 1002. https://doi.org/10.3390/s18041002