A Two-Stage Reconstruction Processor for Human Detection in Compressive Sensing CMOS Radar


Abstract
:1. Introduction
2. Compressive Sensing Radar System
2.1. Compressive Sensing
2.2. SISO Compressive Sensing Radar System
2.3. MIMO Compressive Sensing Radar System
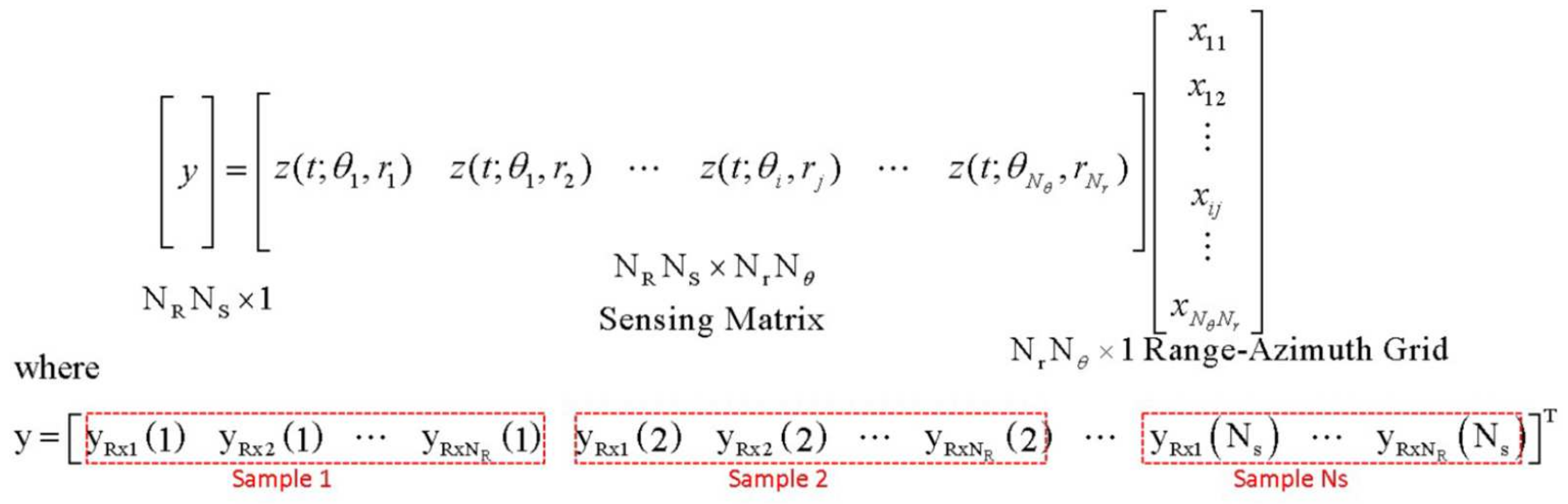
2.4. Path Loss and Human Respiration Signal Model
2.5. Reconstruction Algorithms for Compressive Sensing
| Algorithm 1 Orthogonal Matching Pursuit Algorithm |
| Input: Sensing matrix , measurement , target sparsity K Output: Support set , estimate
|
2.6. Orthogonal Matching Pursuit via Matrix Inversion Bypass
| Algorithm 2 Orthogonal Matching Pursuit via Matrix Inversion Bypass |
| Input: Sensing matrix , measurement , target sparsity K Output: Reconstructed signal , support set
|
3. Two-Stage Reconstruction Algorithm
3.1. Block-Wise OMP Estimation
| Algorithm 3 Block-Wise Estimation Algorithm |
| Input: Sensing matrix , measurement , target sparsity K, block size B Output: Support set
|
3.2. Weight Updating
3.3. Decision Strategy for Fine Estimation
| Algorithm 4 Proposed Two-Stage Reconstruction Algorithm |
| Input: sensing matrix ; received signal ; number of targets K; block size B; training number ; threshold ; merging distance ; number of block candidates ; Output: Support set
|
4. Complexity and Performance Analysis
4.1. Orthogonal Matching Pursuit Algorithm
4.2. OMP-MIB Algorithm
4.3. Proposed Two-Stage OMP Reconstruction Algorithm
4.4. Simulation Result
4.5. Performance Analysis
5. Architecture Design and Implementation
5.1. Architecture of OMP via MIB Processor
5.2. Matching Result Update and Index Selection Unit
5.2.1. Initialization and Matching Result Update Circuit
5.2.2. Index Selection Circuit
5.3. Parameter Update Unit
5.4. Implementation Results and Comparison
6. Conclusions
Acknowledgments
Author Contributions
Conflicts of Interest
References
- Lai, C.-M.; Wu, J.-M.; Huang, P.-C.; Chu, T.-S. A scalable direct-sampling broadband radar receiver supporting simultaneous digital multibeam array in 65 nm cmos. In Proceedings of the IEEE ISSCC Digest, San Francisco, CA, USA, 17–21 February 2013; pp. 242–243. [Google Scholar]
- Andersen, N.; Granhaug, K.; Michaelsen, J.A.; Bagga, S.; Hjortland, H.A.; Knutsen, M.R.; Lande, T.S.; Wisland, D.T. A 118-mW Pulse-Based Radar SoC in 55-nm CMOS for Non-Contact Human Vital Signs Detection. IEEE J. Solid-State Circuits 2017, 52, 3421–3433. [Google Scholar] [CrossRef]
- Hung, W.-P.; Chang, C.-H.; Lee, T.-H. Real-Time and Noncontact Impulse Radio Radar System for um Movement Accuracy and Vital-Sign Monitoring Applications. IEEE Sens. J. 2017, 17, 2349–2358. [Google Scholar] [CrossRef]
- Lazaro, A.; Girbau, D.; Villarino, R.; Ramos, A. Vital signs monitoring using impulse based UWB signal. In Proceedings of the 41th European Mircowave Conference, Manchester, UK, 10–13 October 2011; pp. 135–138. [Google Scholar]
- Nahar, S.; Tran, N.; Ren, L.; Kilic, O.; Fathy, A.E. Through-wall Detection of Human Breathing Rate Using Compressive Sensing Technique. In Proceedings of the IEEE Radio and Wireless Symposium, Phoenix, AZ, USA, 15–18 January 2017; pp. 104–107. [Google Scholar]
- Zhong, Y.; Yang, Y.; Zhu, X.; Dutkiewicz, E.; Zhou, Z.; Jiang, T. Device-Free Sensing for Personnel Detection in a Foliage Environment. IEEE Geosci. Remote Sens. Lett. 2016, 14, 921–925. [Google Scholar] [CrossRef]
- Zhou, Y.-S.; Kong, L.; Cui, G.-L.; Yang, J.-Y. Remote sensing of human body by stepped-frequency continuous-wave. In Proceedings of the 3rd International Conference Bioinformatics Biomedical Engineering, Beijing, China, 11–13 June 2009; pp. 1–4. [Google Scholar]
- Leib, M.; Menzel, W.; Schleicher, B.; Hermann, S. Vital signs monitoring with a UWB radar based on a correlation receiver. In Proceedings of the 4th European Conference on Antennas Propagation, Barcelona, Spain, 12–16 April 2010; pp. 1–5. [Google Scholar]
- Amir, M.; Khausru, H.; Ghavami, M. Study of Human Being Detection in an Indoor Environment Using Ultra Wideband Radar. In Proceedings of the IEEE International Conference on Ultra-WideBand (ICUWB), Paris, France, 1–3 Septemer 2014; pp. 113–118. [Google Scholar]
- Hsieh, C.-H.; Chiu, Y.-F.; Shen, Y.-H.; Chu, T.-S.; Huang, Y.-H. A UWB radar signal processing platform for real-time human respiratory feature extraction based on four-segment linear waveform model. IEEE Trans. Biomed. Circuits Syst. 2016, 10, 219–230. [Google Scholar] [CrossRef] [PubMed]
- Baraniuk, R.; Steeghs, P. Compressive radar imaging. In Proceedings of the IEEE Radar Conference, Boston, MA, USA, 17–20 April 2007; pp. 128–133. [Google Scholar]
- Strohmer, T.; Friedlander, B. Compressed sensing for MIMO radar—Algorithms and performance. In Proceedings of the Conference of the Forty-Third Asilomar Conference on Signals, Systems and Computers, Pacific Grove, CA, USA, 1–4 November 2009; pp. 464–468. [Google Scholar]
- Herman, M.; Strohmer, T. Compressed sensing radar. In Proceedings of the IEEE Radar Conference, Rome, Italy, 26–30 May 2008; pp. 1–6. [Google Scholar]
- Herman, M.A.; Strohmer, T. High-resolution radar via compressed sensing. IEEE Trans. Signal Process. 2009, 57, 2275–2284. [Google Scholar] [CrossRef]
- Qaisar, S.; Bilal, R.; Iqbal, W.; Naureen, M.; Lee, S. Compressive sensing: From theory to applications, a survey. J. Commun. Netw. 2013, 15, 443–456. [Google Scholar] [CrossRef]
- Donoho, D.; Tsaig, Y.; Drori, I.; Starck, J.-L. Sparse solution of underdetermined systems of linear equations by stagewise orthogonal matching pursuit. IEEE Trans. Inf. Theory 2012, 58, 1094–1121. [Google Scholar] [CrossRef]
- Dai, W.; Milenkovic, O. Subspace pursuit for compressive sensing signal reconstruction. IEEE Trans. Inf. Theory 2009, 55, 2230–2249. [Google Scholar] [CrossRef]
- Chatterjee, S.; Hari, K.V.S.; Handel, P.; Skoglund, M. Projection-based atom selection in orthogonal matching pursuit for compressive sensing. In Proceedings of the National Conference on Communications (NCC), Kharagpur, India, 3–5 February 2012; pp. 1–5. [Google Scholar]
- Septimus, A.; Steinberg, R. Compressive sampling hardware reconstruction. In Proceedings of the IEEE International Symposium on Circuits and Systems (ISCAS), Paris, France, 30 May–2 June 2010; pp. 3316–3319. [Google Scholar]
- Chatterjee, S.; Sundman, D.; Skoglund, M. Look ahead orthogonal matching pursuit. In Proceedings of the IEEE International Conference on Acoustics, Speech and Signal Processing, Prague, Czech Republic, 22–27 May 2011; pp. 4024–4027. [Google Scholar]
- Stanislaus, J.; Mohsenin, T. High performance compressive sensing reconstruction hardware with QRD process. In Proceedings of the IEEE International Symposium on Circuits and Systems, Seoul, South Korea, 20–23 May 2012; pp. 29–32. [Google Scholar]
- Candes, E.; Wakin, M. An introduction to compressive sampling. IEEE Signal Process. Mag. 2008, 25, 21–30. [Google Scholar] [CrossRef]
- Donoho, D. Compressed sensing. IEEE Trans. Inf. Theory 2006, 52, 1289–1306. [Google Scholar] [CrossRef]
- Zeng, J.; Dong, Z. Some MIMO radar advantages over phased array radar. In Proceedings of the 2nd International Conference on Industrial Mechatronics and Automation (ICIMA), Wuhan, China, 30–31 May 2010; pp. 211–213. [Google Scholar]
- Fishler, E.; Haimovich, A.; Blum, R.; Cimini, R.; Chizhik, D.; Valenzuela, R. Performance of MIMO radar systems: Advantages of angular diversity. In Proceedings of the Conference of the Thirty-Eighth Asilomar Conference on Signals, Systems and Computers, Pacific Grove, CA, USA, 7–10 November 2004; Volume 1, pp. 305–309. [Google Scholar]
- Tropp, J.; Gilbert, A. Signal recovery from random measurements via orthogonal matching pursuit. IEEE Trans. Inf. Theory 2007, 53, 4655–4666. [Google Scholar] [CrossRef]
- Bjorck, A. Numerical Methods for Least Squatres Problems; Society of Industrial and Applied Mathematics: Philadelphia, PA, USA, 1996. [Google Scholar]
- Bailey, D.; Ferguson, H. A strassen-newton algorithm for high-speed parallelizable matrix inversion. In Proceedings of the 1988 Supercomputing, Orlando, FL, USA, 12–17 November 1988; Volume 1, pp. 419–424. [Google Scholar]
- Huang, G.; Wang, L. High-speed signal reconstruction with orthogonal matching pursuit via matrix inversion bypass. In Proceedings of the IEEE Workshop on Signal Processing Systems (SiPS), Quebec City, QC, Canada, 17–19 October 2012; pp. 191–196. [Google Scholar]
- Jhang, J.-W.; Huang, Y.-H. A high-SNR projection-based atom selection OMP processor for compressive sensing. IEEE Trans. Very Large Scale Integr. Syst. 2015, 23, 2209–2220. [Google Scholar] [CrossRef]
- Lee, Y.-Y.; Wang, C.-H.; Huang, Y.-H. A Hybrid RF/Baseband Precoding Processor Based on Parallel-Index-Selection Matrix-Inversion-Bypass Simultaneous Orthogonal Matching Pursuit for Millimeter Wave MIMO Systems. IEEE Trans. Signal Process. 2015, 63, 305–317. [Google Scholar] [CrossRef]
- Rabah, H.; Amira, A.; Mohanty, B.K.; Almaadeed, S.; Meher, P.K. FPGA implementation of orthogonal matching pursuit for compressive sensing reconstruction. IEEE Trans. Very Large Scale Integr. Syst. 2015, 23, 2209–2220. [Google Scholar] [CrossRef]
- Lin, Y.-M.; Chen, Y.; Huang, N.-S.; Wu, A.-Y. Low-complexity stochastic gradient pursuit algorithm and architecture for robust compressive sensing reconstruction. IEEE Trans. Signal Process. 2017, 65, 638–650. [Google Scholar] [CrossRef]














{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Plate-Form | Xlinx FPGA + Software |
|---|---|
| Model | Vertex-7 |
| Slice Registers | 6535 |
| Slice LUTs | 207,967 |
| Block RAMs | 1092 |
| DSPs | 560 |
| Clock | 318 MHz |
| Latency | 35.4 ms |
| Radar Image Resolution | |
| Radar Image Rate | 28.2 frames/s |
| Proposed | [19] | [21] | [29] | [32] | [30] | [33] | |
|---|---|---|---|---|---|---|---|
| Algorithm | Two-Stage OMB-MIB | OMP | OMP | OMP-MIB | OMP | PIS-MIB-SOMP | SGP |
| Technology | Virtex-7 | Virtex-5 | 65 nm | 65 nm | Vertex-6 | 90 nm | 90 nm |
| (N,M) | (3328,512) | (128,32) | (256,64) | (256,150) | (1024,256) | (1024,256) | (256,64) |
| Sparsity | 8 | 5 | 8 | variable | 36 | 12 | 8 |
| Clock (MHz) | 318 | 39 | 165 | 500 | 120 | 141 | 150 |
| Latency Time (s) | 35,400 | 24 | 13.7 | NONE | 340 | 72.2 | 61.97 |
| Function | Radar Object Detection | Signal Reconstruct | Signal Reconstruct | Signal Reconstruct | Signal Reconstruct | Signal Reconstruct | Signal Reconstruct |
© 2018 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Tsao, K.-C.; Lee, L.; Chu, T.-S.; Huang, Y.-H. A Two-Stage Reconstruction Processor for Human Detection in Compressive Sensing CMOS Radar. Sensors 2018, 18, 1106. https://doi.org/10.3390/s18041106
Tsao K-C, Lee L, Chu T-S, Huang Y-H. A Two-Stage Reconstruction Processor for Human Detection in Compressive Sensing CMOS Radar. Sensors. 2018; 18(4):1106. https://doi.org/10.3390/s18041106
Chicago/Turabian StyleTsao, Kuei-Chi, Ling Lee, Ta-Shun Chu, and Yuan-Hao Huang. 2018. "A Two-Stage Reconstruction Processor for Human Detection in Compressive Sensing CMOS Radar" Sensors 18, no. 4: 1106. https://doi.org/10.3390/s18041106