1. Introduction
Underwater Wireless Sensors Networks (UWSNs) have numerous applications in diverse fields such as submarine detection, disaster prevention, oil/gas spill monitoring, off-shore exploration, and military target tracking. The characteristics of UWSNs e.g., high error rate probability, large propagation delay, floating node mobility and low communication bandwidth are totally diverse compared to terrestrial networks. Unfortunately, due to the dynamic nature of links, the connectivity of the sensor nodes cannot be assured and the reasons include rapid changes in network topology, variations in temperature, multi-path fading, environmental noises and interferences [
1]. Since radio waves don’t have the ability to propagate through the water medium over long distances, sensor nodes use acoustic signals for communication. However, the presence of salt in seawater significantly affects the speed of sound. The average speed c of the acoustic wave fluctuates between 1450 m/s to 1550 m/s, which depends on the temperature and pressure in water. Depth Based Routing protocol (DBR) [
2] uses the depth information of the sensor node for flooding the data packets towards the centralized station. The depth can be found with the help of depth sensor, which is integrated within every sensor node. The flooding is omni-directional so any node that is in the range of a sensor receives the packet. The sensor node adds its depth information to the packet. This depth information is compared by the receiving node with its own depth. In case the current node is shallower than the depth information appended in the packet, the receiving node is a PFN. The PFN holds the packet and sets the timer based on the holding time computation. In case PFN does not receive any duplicate copy of the packet until the expiration of the timer, it will forward the packet. On the contrary, if the node receives a duplicate copy of the packet before the expiry of the timer, then it will simply drop the packet. In case the receiving node is deeper than the sender node, it will drop the packet if and only if there is no PFN available to source. Weighting Depth and Forwarding Area Division protocol (WDFAD-DBR) [
3] will choose the forwarder node by calculating the weighting sum of the difference in the depth at two hops. The DBR only considers the first hop PFNs for data forwarding but on the other hand WDFAD-DBR uses the accumulative depth at two hops nodes. Our proposed scheme, Dolphin and Whale Pods Routing (DOW-PR) protocol considers the number of PFNs, number of suppressed nodes and the hop count to select the node for forwarding the packet generated/forwarded by the source node. Nonetheless, the proposed scheme will select the shallowest suppressed node for forwarding the packet if the source node suffers from void region towards the sinks. The proposed scheme will divide the transmission range into different energy levels, so that the node (if selected as forwarder) that is closer to the source node will require less amount of transmission energy compared to the node that is far away. Therefore, the transmission energy will not remain constant through the transmission range; rather, it will vary in different energy levels. Furthermore, we propose another scheme called whale-pod comprised of multiple sinks placed at the water surface with an additional sink deployed underwater at the depth of 700 m. A high bandwidth physical connection exists between the embedded sink and the surface sinks. When the packet is received by the embedded sink, it is considered as a successful delivery of a packet to the destination.
Contributions: The contributions of our work have been summarized in the itemized text below: (1) The optimal set of mapped values for number of potential forwarding nodes and number of suppressed nodes has been investigated; (2) Significant energy is saved due to optimal route discovery mechanism; (3) Additional energy conservation achieved by dividing forwarder region into transmission power levels; (4) An optimal solution provided to cater for the problem of voids and energy holes; (5) Performance parameters included in formulating the holding time i.e., number of potential forwarder, number of suppressed nodes, hop count; (6) Significant improvement in end-to-end delay achieved by readjusting the position of sink nodes; (7) Traffic congestion sorted out by averaging potential forwarding nodes which forms the basis of item 2. To implement the above mentioned contributions, we follow the following steps:
Selection of forwarder by computing the optimal average number of PFNs of the forwarding nodes,
Calculating optimal transmission power adjustment based upon more distant node from the source node in potential forwarding region,
Finding the alternate node from the suppressed region for the case if source node is in a void,
Carrying out packet holding time calculations to assign priorities,
Finding the nearest sink for the case if one of the sink is embedded underwater.
The rest of the manuscript has been structured as follows. The detailed discussion regarding previous work on routing protocols in UWSNs is carried out in
Section 2.
Section 3 is about the identification of the problem and present the problem statement. The system model is explained in
Section 4. The experimental setup and simulation outcomes of our approaches are described in
Section 5. Performance comparison and analysis discussed in
Section 6. Finally, a brief conclusion is presented in
Section 7.
2. Previous Work
In this section, we first review some related works on routing protocols in Underwater Acoustic Sensor Networks (UASNs), and will discuss their pros and cons. Then, we discuss the differences between WDFAD-DBR and proposed DOW-PR routing protocol.
The most important and recognized property of Wireless Sensor Network (WSNs) is Energy efficiency. There are many types of terrestrial WSN protocols i.e., Directed Diffusion [
4], Two-Tier Data Dissemination [
5], Gradient [
6], Rumor routing [
7], and Sensor Protocol Information via Negotiation (SPIN) [
8], etc. The existing protocols designed for WSNs are not feasible for UWSNs because of multiple reasons that include high propagation delays, high mobility of nodes, severe multipath phenomena, acoustic signaling, etc. Numerous UWSNs protocols are proposed, and it includes, Depth Based Routing (DBR) [
2], Vector Base Forwarding (VBF) [
9], Focused Beam Routing (FBR) [
10], Hop by Hop Vector Based Forwarding (HH-VBF) [
11], Adaptive Hop by Hop Vector Based Forwarding (AHH-VBF) [
12], Directional Flooding Routing DFR [
13], Delay Tolerant Network DTN [
14], etc. These networks have been proposed in the last few years for increasing energy efficiency in underwater WSNs. In UWSNs, some protocols are designed to achieved a higher efficiency in energy such as HH-VBF, AHH-VBF and DFR.
Routing protocols for UWSNs are categorized into four classes. The first such class is that of Flooding Based Routing (FBR) protocols, which includes HH-VBF, FBR, DBR, H2–DAB, DFR, etc. The second is multipath based routing, which include protocols presented by Winston et al. [
15], Dario Pompili et al. [
16] and so on. Third is Clustered Based Routing protocols, which include Minimum-Cost Clustering Protocol (MCCP) [
10], Distributed Underwater Clustering Scheme (DUCS) [
17], and Hydro Cast [
18], etc. The last class being that of Miscellaneous Routing protocols including ADAPTIVE, Information-Carrying based Routing Protocol (ICRP) [
19], Phero-Trail and so on.
Geographic based routing protocol such as VBF, HH-VBF requires a location information of the network where the nodes are deployed to send a packet to the centralized station from the source node. In VBF [
9], a routing vector (a vector drawn between source and sink node) and a desirableness factor (suitableness) is defined so that the node that is close to the virtual vector and also to the sink node will be selected as a forwarder. HH-VBF is proposed in contest of VBF. In HH-VBF, instead of using fixed virtual vector and fixed forwarding pipeline radius, it is redefined at each hop in the whole network lifetime. The reliability and PDR of the network is improved due to this amendment in VBF but at the cast of increase in communication overhead. In uneven distributed networks (i.e., sparse networks, where the number of nodes is less), the performance of HH-VBF is lower than that of VBF. The reason behind this drawback is the constant pipeline radius maintained throughout the network lifetime.
In [
12], Hwang et al. proposed AHH-VBF. In order to restrict the forwarding range and improve the PDR, AHH-VBF changes the width of pipeline, according to network nodes distribution, in order to control the forwarding area. Unlike HH-VBH, AHH-VBF can adaptively adjust the power level hop by hop according to the neighbor node distribution of local region. Therefore, energy consumption is reduced and lifetime of the network is increased.
ESEVBF (Energy Scaled and Expanded VBF) [
20] scales and expands the holding time with the residual energy of all forwarding nodes in the potential forwarding zone (PFZ). The ultimate goal achieved in this protocol is to reduce the duplicate packets due to the imbalance between the holding time difference and propagation delay. Consequently, it reduces the energy expenditure of the network along with considerable improvement seen in end-to-end delay. However, it does not provide any improvement in PDR compared to counterpart AHH-VBF.
In FBR [
10], the unnecessary flooding (i.e., the forwarding of a packet by a router from any node to every other node attached to the router except the node from which the packet arrived) was reduced where the transmission power constrained the flooding. FBR uses different transmission power levels that range from P1 to PN, in order to reduce the consumption of energy in UWSNs, so that life of the network is enhanced. The FBR is a location based protocol where each node knows its own location and that of the sink. In FBR, the transmission radius, corresponding to each power level, is the area within a cone of an angle originating from the source node towards the sink. FBR uses two packets request to send (RTS) and clear to send (CTS) in the next forwarder selection scheme. To select PFN, source node broadcasts an RTS packet with a power level P1. In response to the RTS packet, the PFNs initiate the CTS packet. The CTS packet(s) received by the source node. In case, if more than one CTS packet received by the source node, then it will select the PFN as a forwarder that is closest to the destination. For the case, if no CTS packet is received from any PFN, then the source node boosts its power level to find more PFNs. The process repeated until the source node finds PFNs. When power level becomes PN and still no CTS packet is received by the source, then the cone is shifted to any direction around the main cone. In this way, the packet is transmitted from a source to a sink.
In DFR [
14], the author proposed a novel protocol that improves the efficiency of UWSNs, where the source node and sink node determine the base angle so that the flooding region of the packet is confined. If a node receives a packet, it will first check whether the node is within the base angle and then it will forward the packet; otherwise, directly discard it. DFR controls the range and the direction of flooding packet due to which a great deal of energy is saved. However, the problem with DFR is the consistent transmuting power amplitude maintained regardless of whether the forwarder is placed near or far. For this very reason, the protocol suffers from energy unbalancing among the network nodes. Additionally, in sparse networks, it is difficult to find out the PFNs due to more probability of void hole occurrence.
Another routing protocol belongs to Communication path based routing protocol, whose scheme is abbreviated as Relative Distance Based Forwarding (RDBF) and is introduced in [
21]. This scheme emphasizes end-to-end delay, decrementing wastage of energy and the efficient routing mechanism. The delay and wastage of energy can be minimized if less number of nodes will participate in data packets forwarding. RDBF also implement the mechanism look after the problem of duplicate packets to transmission time adjustment of forwarding nodes.
A clustering scheme is used in [
22,
23] for routing in UWSNs, which consists of two phases i.e., set-up phase and communication phase. The cluster heads are selected in set-up phase, while, in the communication phase, the nodes collect the data and forward it to their corresponding clustering heads. However, as the nodes move more frequently in the horizontal direction and very little in the vertical direction, there will be water currents all the time and the clustering head selection is repeated, which produces more overhead on the network. After this, the nodes collect and forward the data to the sink node only when all the clustering members collected the data, which results in long end-to-end delays. Therefore, clustering schemes are not good for UWSNs, especially when there are real-time applications that are time intensive too, while, for time critical applications, a novel protocol is proposed for UWSNs called multipath routing protocol in [
24]. However, due to the water current, the topology of the network may change and the path calculated in the previous round is not optimal in the current round. In addition, when we transmit the available packets, a lot of energy is wasted and each time source node requests to establish a multi-paths or optimal path according to the bit error rate, propagation distance and energy consumption of each link.
Two types of holes are created in wireless sensors network, one is a void hole that occurs due to unavailability of forwarder nodes, and the other is an energy hole that occurs due to the imbalanced data traffic in the network. The creation of a hole is a major factor in degrading the performance of the entire network. In this regard, Zahid et al. [
25] proposed a protocol to maximize the network lifespan via hole alleviation. It evenly divides the number of transmissions over various network areas that are capable of balancing energy dissipation among the nodes.
Sherif et al. [
26] authors introduces delay tolerant network (DTN) routing protocol, which is about the motion of node, to handle continuous movements of nodes and to make practical and effective use of the single-hop and multi-hop routing schemes.
The objective of these two routing protocols i.e., Round-Based clustering (RBC) [
27] and Link-State Based routing (LSB) [
28] is to minimize energy utilization or wastage by sensing nodes. These routing protocols give us different possible solutions so that energy can be saved in the sensing nodes at the physical layer, medium-access control (MAC) and routing layers. Such routing protocols consider the conditions of water, whether it is deep or shallow water, as the parameters of both water conditions are totally different. The big problem faced by the MAC layer is the larger overhead to mitigate packet collision rate. This collision overhead can also be tackled by the routing protocols. In order to remove redundancy of data packets in the network MAC layer, solutions to overcome the confines are proposed. This routing protocol uses rounds, and each round has four different stages; in these four stages, this scheme utilizes an appropriate mechanism in order to resolve the issue. The proposed clustering routing protocol minimizes the energy consumption of the network, which in turn enhance throughput and lifespan of the network.
Wan et al. propose PSFQ (Pump Slowly and Fetch Quickly) [
29], in which hop by hop mechanism is utilized. The theme is that the sensing node forwards the data unit close to the neighbors with delay or with less speed. If any data packet has been lost, the receiver immediately gets that data packet that has been lost in the acoustic sensors’ network channel. The receiver gets the packet that has been lost more frequently at a rate five times faster than the sender node that sends the data packet to its immediate neighbor. Data packets are sent towards the sink node passing through multiple hops in a consistently good manner and with reliability. In PSFQ, ARQ (Automatic Repeat Request) utilizes a hop-by-hop mechanism. However, due to one of the intrinsic characteristics’ long propagation delay caused due to acoustic signals, ARQ is unable to utilize more acoustic channels in UWSNs.
Another routing protocol or routing scheme is Adaptive Mobility of Courier nodes in Threshold-optimized Depth-based (AMCTD) [
30]. This proposed routing protocol enhances the lifespan of the entire network. The assumptions that are used in this routing protocol are very concerned with and helpful in the reduction of energy wastage of the sensing nodes having low depth during the stability period. It makes available the computation of weight with optimization, balances the network globally, and also provides holding time computation efficiently for the sensing nodes that send the data packets to its neighbors. AMCTD also enhances the lifetime of the entire network and increments the stability of the whole network while deploying the courier nodes efficiently as well. It proposes a function called efficient Weight Functions (WF), which is used to increment the stability duration of the sensors network. This scheme also provides a model in order to decrement noise, path losses and other attenuation factors for the sensors that are present at the region in UWSNs where the depth is less.
H2-DAB protocol, which is also abbreviated as hop by hop dynamic addressing based protocol, is free of location information, as it belongs to a beacon based routing protocol class, as localization information of the node is costly, so, in this way, it reduces the cost of hardware. This scheme counts the hop number from the sink nodes present on the surface, and assigns a distinct address to all sensors that are part of the network by using the beacon mechanism from the nodes present on the surface (sink nodes). The node that has larger dynamical and distinct address will forward the packet towards the node that has a dynamically smaller address, up until it reaches the destination node or sink node. In [
31], this scheme is used by using the concept of unique IDs of the sensing nodes. If it is assumed that packets are forwarded towards the sinks, then multi sink architecture must be taken into consideration in case any sink node detected the data packet successfully.
In [
32], mutilpath routing protocol is introduced in which it is considered that a source node sends a multipath route request towards the destination node before it sends the data packet to the destination. In response to the request, multiple paths/routs are created between source and destination. On the basis of two parameters, the source node sorts out the optimal route. Those two parameters are path length (number of hops) and energy distribution factor along this paths. Source node selects power for the transmission and will send the data packet through that path in which energy is evenly and fairly distributed. The node that is present at the destination will receive redundant data packets as repetition of packets due to multiple paths. It is totally dependent upon the destination node to choose one fault free packet and discard the others. In a multipath based routing scheme, more energy will be consumed because of redundancy of packets as the data packets received through different paths.
The authors in [
2] proposed DBR in which the information about the full dimension and location of a node is not required. DBR is based on the depth information, which can be easily found by a depth sensor integrated within every sensor node to forward a packet from the source node to the sink. DBR uses a greedy mechanism to find one hop forwarding path. However, the selected forwarding node may not be able to forward the packet due to occurrence of void hole, which reduces the PDR.
In [
33], the authors propose an Energy-Efficient Depth-Based Routing scheme (EEDBR) to enhance the life of the network and stability period of the network by considering the depth and the energy remaining in the nodes. EEDBR achieved the significant improvement E2ED along with the better utilization of the energy bank, especially for nodes that are shallower. EEDBR protocol implements the phenomenal through formulating the holding time and that depends upon current energy storage level. There is a lack of energy fairness because energy is unevenly distributed among sensors. Further, a detailed qualitative comparison of different characteristics of underwater sensor networks is provided in
Table 1.
First and foremost, the problem of void holes (absence of forwarder in the transmission range of the source node) occurrence is exploited by the authors in our baseline paper i.e., WDFAD-DBR [
3]. The design of the algorithm ensures the significant reduction of the packet-drop due to successful void holes mitigation, especially when the network is sparse. WDFAD-DBR considers the depth of the forwarders at the immediate and next hop. The weighting value is assigned to potential forwarders at each hop in such a way that maximum advanced distance can be achieved. The priority of the two-hop path selection effectively overcomes the frequent upward hemispherical void regions. The objective function implemented through the design of the holding time calculation is based upon the weighting sum of the parameters i.e., first and second hop depths. Secondly, the baseline protocol WDFAD-DBR also achieves better conservation of the network energy usage. The run-time readjustment of the forwarding area division encounters multiple copies of packet propagation in the network. To support the above phenomenon, the WDFAD-DBR will judge the link conditions and sparseness or denseness of the nodes in the network. The prediction of neighbors are implemented in accordance with the mobility pattern, speed and
x,
y,
z-coordinates among nodes. Thirdly, the collision of the packets is investigated while contending the channel at the MAC layer.
In this paper, our proposed protocol DOW-PR focuses on selecting the optimal forwarder. This is very similar to the WDFAD-DBR. Much like WDFAD-DBR, DOW-PR also considers the weighting sum of depth of the current and the next expected hops’ sensor nodes. The novelties of the proposed protocol that differentiate themselves from counterpart WDFAD-DBR is mentioned in itemized text as follows:
To improve the performance of WDFAD-DBR, we propose a state-of-the-art DOW-PR routing protocol in which we divide the transmission range into different transmission power levels while selecting the next forwarding node. The source node searches for the optimal power level for packet transmission.
We also consider the additional parameters i.e., number of PFNs and number of suppressed nodes. WDFAD-DBR does not consider the above-mentioned parameters due to which a network consumes a significant amount of receiving energy, especially in dense networks.
Along with other parameters, our scheme also considers the number of hops traversed by the packet initiated from the source node. Consequently, DOW-PR optimizes the shortest possible path and thereby improves the end-to-end delays.
WDFAD-DBR does not provide any mechanism for void hole occurrences at the second hop forwarder. Our proposed protocol DOW-PR will select the node for broadcasting from the suppressed nodes when there is no PFN available.
In DOW-PR, we also propose another system (Whale pod) in which multiple sinks are placed at water surface, but only one sink is embedded inside the water and will be physically connected with the surface sink through high bandwidth connection.
4. Proposed Scheme
In this section, we describe the network architecture, division of transmission range in different transmission power levels, and selection of suppressed node in the absence of potential forwarding nodes.
4.1. Network Architecture
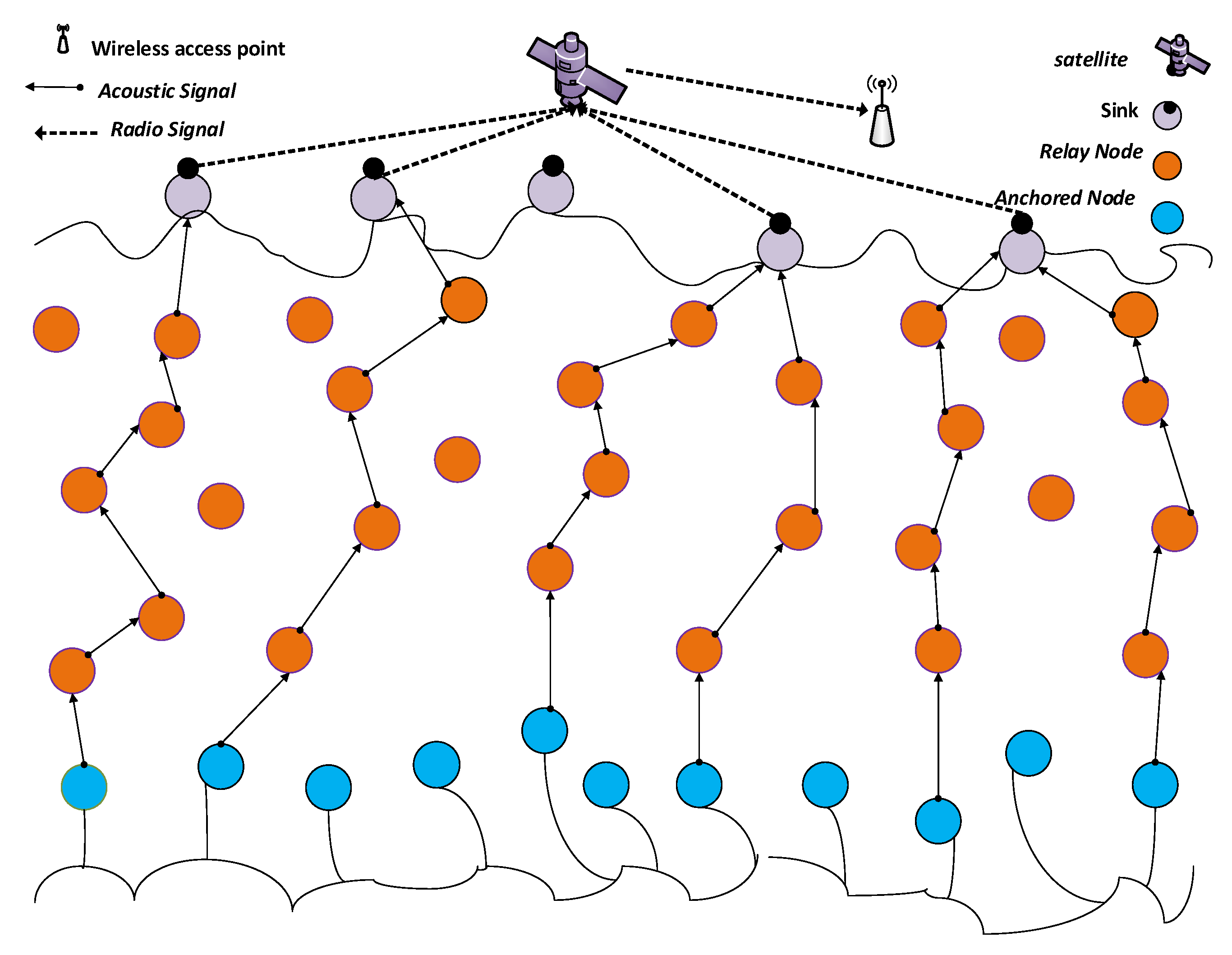
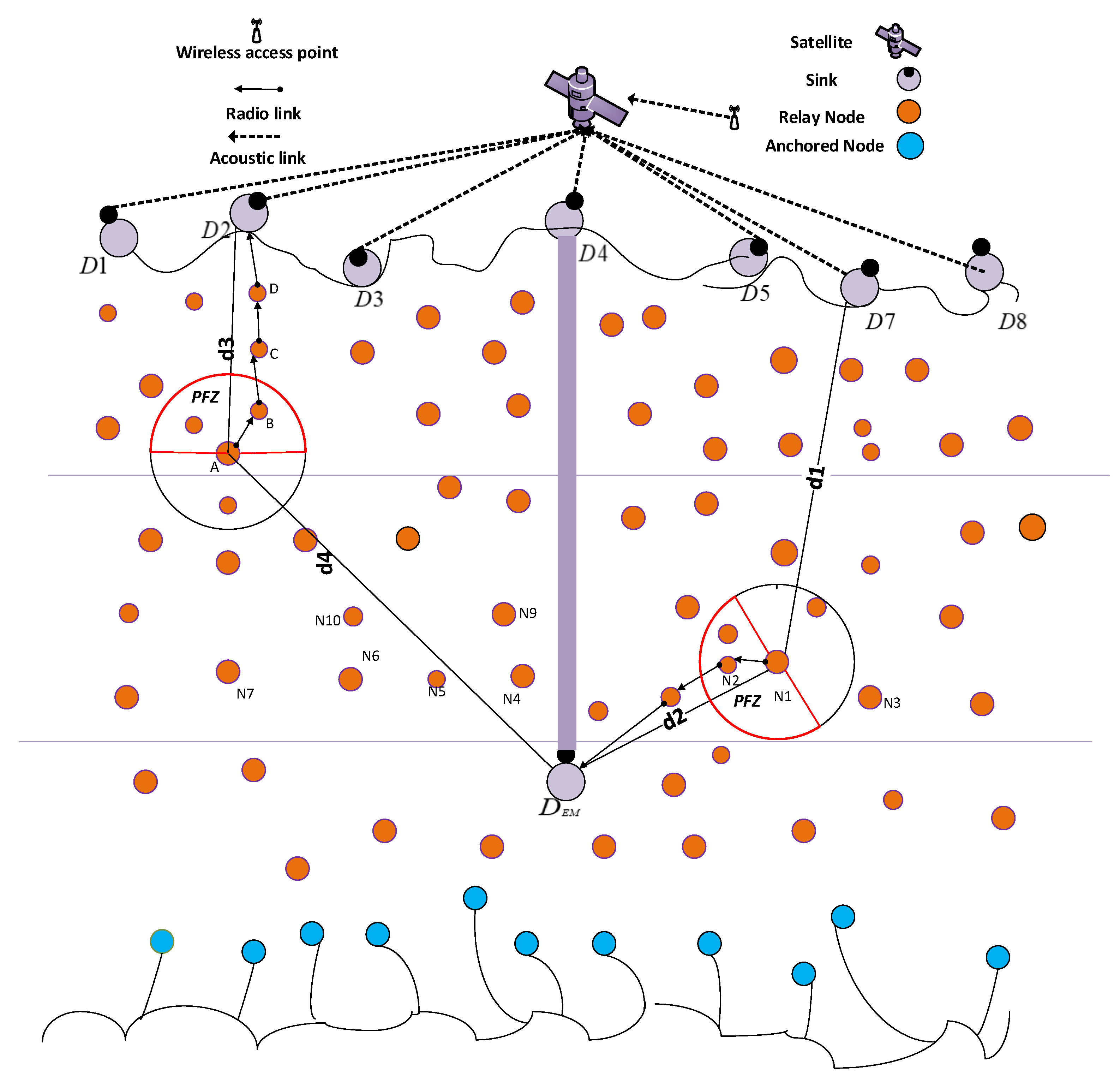
The network architecture of DOW-PR protocol is composed of sink nodes, relay nodes and anchored node as shown in
Figure 2. Sink stations are situated at the sea roof and consists of radio and acoustic modem in order to communicate with each other through radio link and with the sensor networks through acoustic signals. These nodes are centralized stations, which can receive and transmit signals to the external networks. Anchored nodes are fixed at the seabed and their task is to collect data from the environment. Anchored nodes are fixed with the tether [
34] and movable with water current or any other disturbance in the environment. Relay nodes are deployed at different depths, which forward the received data. Sink nodes can communicate within water through acoustic links and communicate with the external network through radio links. Basically, sink nodes are the centralized stations. Since sink nodes can communicate with each other, the data packet received by any sink nodes will be considered a successful delivery to the destination. Typical applications of this network include monitoring of underwater plates in tectonics or environmental monitoring [
35].
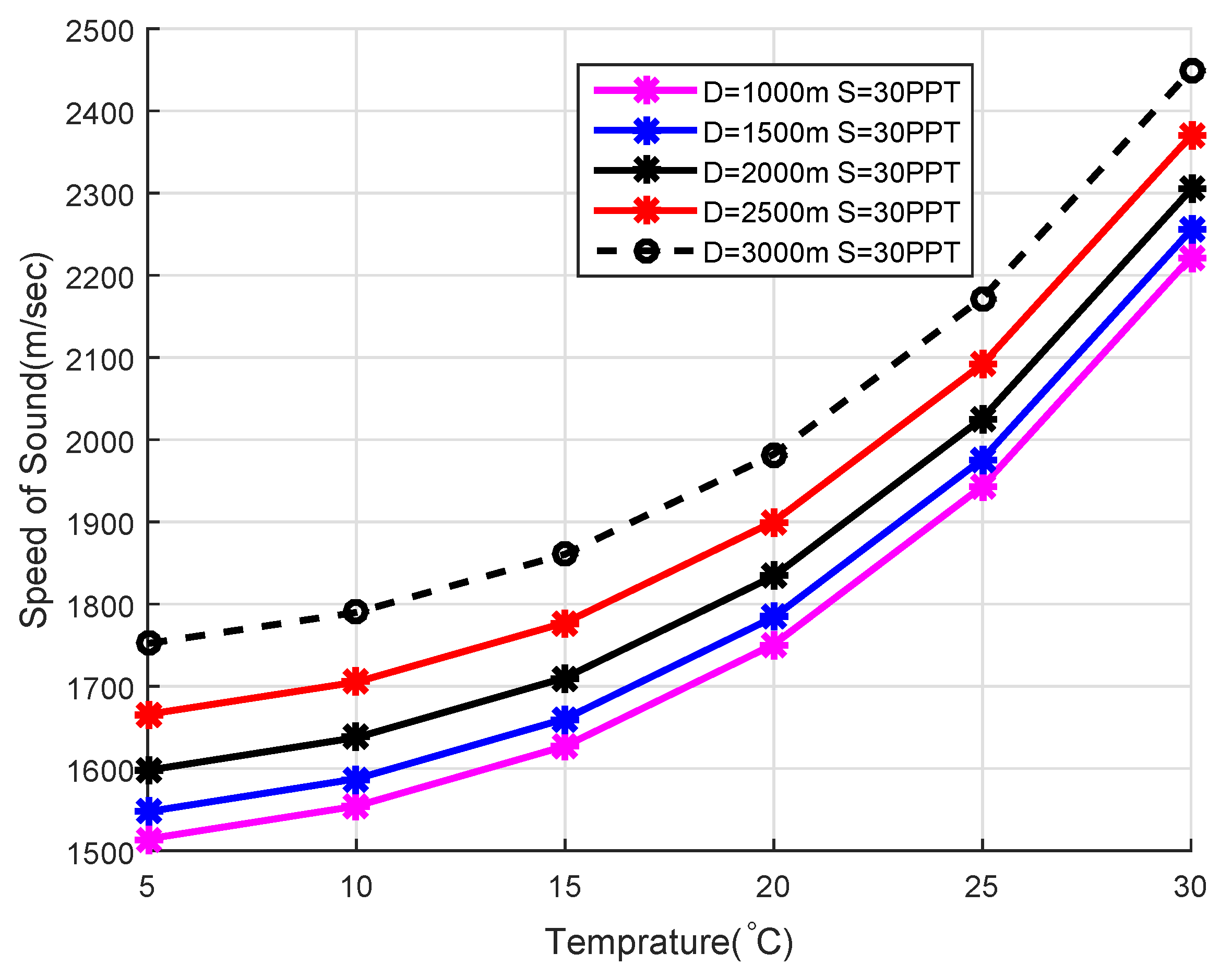
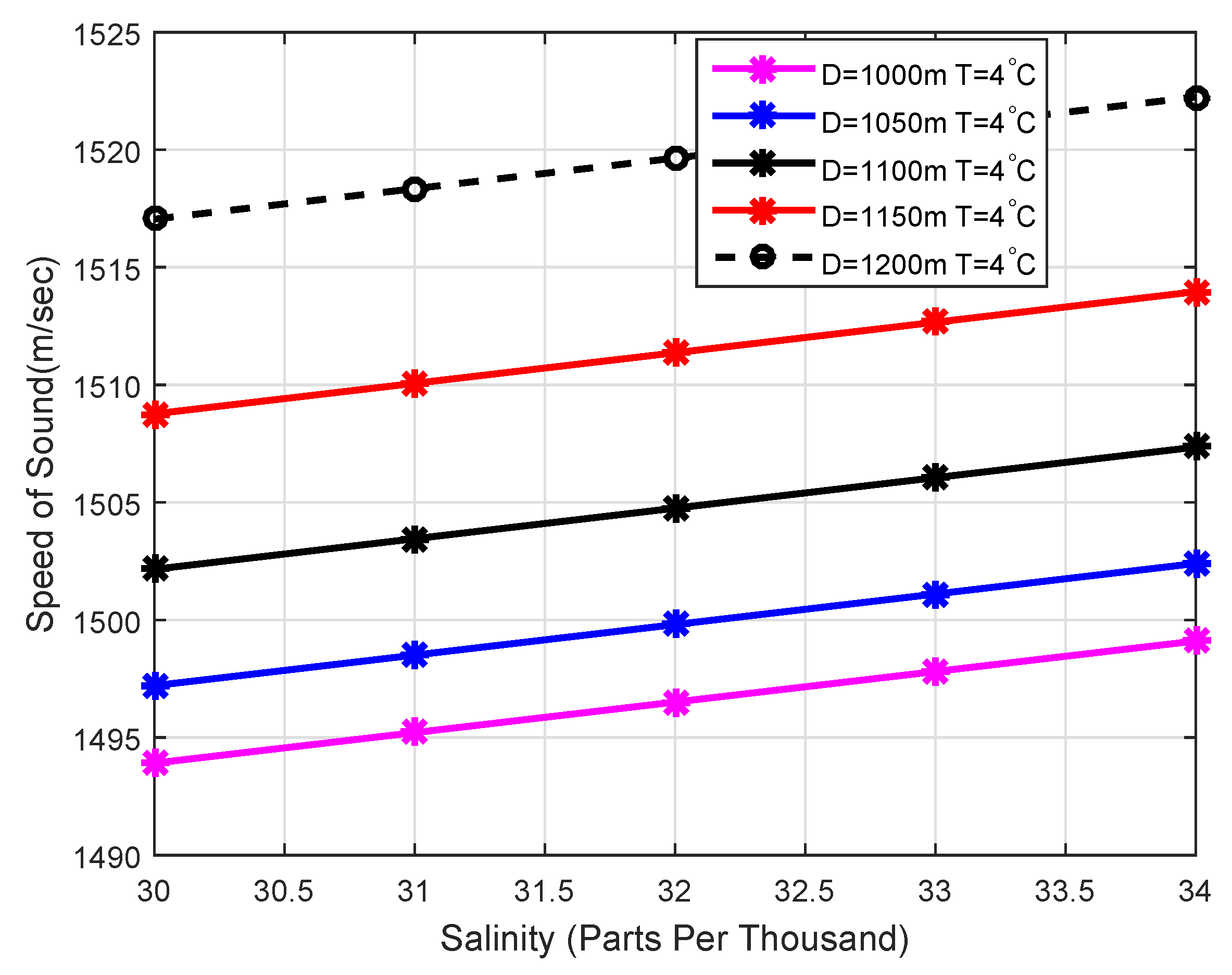
4.2. Acoustic Signal Velocity in the Underwater Environment
Different factors affect the speed of acoustic waves i.e., temperature variation, pressures at different layers of the sea and salinity of the water. Mathematically, it can be related as [
36]:
where
c represents the velocity of the acoustic signal in m/s ,
T represent the temperature in degree Celsius,
S is the salinity in parts per thousand and
D represents the depth in meters. The sound speed increases with the increase in temperature as shown in
Figure 3 and speed of sound variation with respect to salinity shown in
Figure 4. The above Equation is valid for 0
C
30
C,
40 PPT,
8000 m.
4.3. Acoustic Signal Reflection/Refraction in the Underwater Environment
Channel geometry and its reflection and refraction properties influence the impulse response of an acoustic channel. The total count of major paths for propagation and their relative delays and strengths are also determined by these characteristics. Strictly speaking, the number of signal echoes is infinitely large, but after discarding those which have undergone multiple reflections and thereby lost much of their energy, we are left with only a few significant paths. The longest path delay governs the total multipath spread, which is to the tune of tens of milliseconds. Such values are usually reported in shallow-water experiments [
37]. The dispersion of individual paths is significantly lesser than the total multipath spread. Therefore, for systems with maximum frequencies significantly below the channel cutoff (several tens of kilohertz in our simulations), it can be ignored. For systems currently in use, this is typically the case. For the sake of a fair analysis, we ignore the reflection phenomena for both DOW-PR and WDFAD-DBR in our simulations.
4.4. Energy Propagation Model
The acoustic channel attenuation in UWSNs over
d is defined by the following formula [
38]:
Two terms used in the above equation i.e., the spreading loss and absorption loss.
k may have values i.e., 1, 1.5 and 2 for represents the spreading coefficient which defines the geometry of the propagation. If
k = 1, the geometry of propagation is cylindrical spreading in shallow water, however
k = 2 pertains to the geometry of the propagation spherically spreading in deep water, while, for
k = 1.5, the geometry of the propagation is practical spreading where
represents the absorption coefficient. The underwater noise can be found by the following expression:
where
represents turbulence noise,
represents shipping noise,
represents waves noise and
represents thermal noise. Noise in acoustic channels comprises site-specific noise and ambient noise. While site-specific noise only exists in certain places, backgrounds of quiet deep seas always have ambient noise present. For instance, snapping shrimps in warmer waters create acoustic noise and so does ice cracking in polar regions. Turbulences, rain, breaking waves and distant shipping give rise to ambient noise as shown in the above equation. Although this noise is not white, it’s usually approximated as Gaussian. Contrary to ambient noise, significant non-Gaussian components are present in site-specific noise. Our simulation only considers narrow band ambient noise and that is taken to be Gaussian. Ambient noises’ acoustic signal is distorted due to ambient noises that have completely different effects depending upon the location and frequency. Practically, the noises discussed above are the major contributors at frequencies from 10 to 100 KHz.
Noise spectrum levels typically decrease from about 140 dB re 1 Pa/Hz at 1 Hz to about 30 dB re 1 Pa/Hz at 100 KHz . We have used a central acoustic signal frequency of 12 KHz with an approximate noise level of 50 dB re 1 Pa/Hz to fair noise model close to practical values.
4.5. Packet Types in the Dolphin and Whale Pods Routing
There are three various types of packets in DOW-PR routing protocol, which are NEIGHBOR REQUEST, ACK and DATA. The source node uses packet NEIGHBOR REQUEST to search its qualified forwarding nodes. Its format is shown as an NR (TID, SID, DP, VA). TID field is a two-bit number that differentiates between the packets. The TID for NR is “00”. SID abbreviated as ID of the source and it is broadcast in the neighbor request message. DP represents the depth of source node and VA is a one bit number represents the void hole announcement. The value of VA will be true if the source found a void hole. ACK packet is sent in reply to neighbor request means the neighbor node send its information. The format of ACK is ACK (TID, SID, DP). The TID for ACK packet is “01”, SID presents the identification ID of the current neighbor sensor and DP is the depth of node sending ACK packet. DATA is the real data and it has header and payload. The format of DATA is (TID, SID, DID, DP, PID). The TID value for DATA packet type is “10”, SID is the source ID, DID represents the destination address, DP represents source depth and PID representing packet sequence number. The neighbor request and Acknowledgment packet has smaller size than the DATA packet.
4.6. Division of Transmission Range into Different Transmission Power Levels
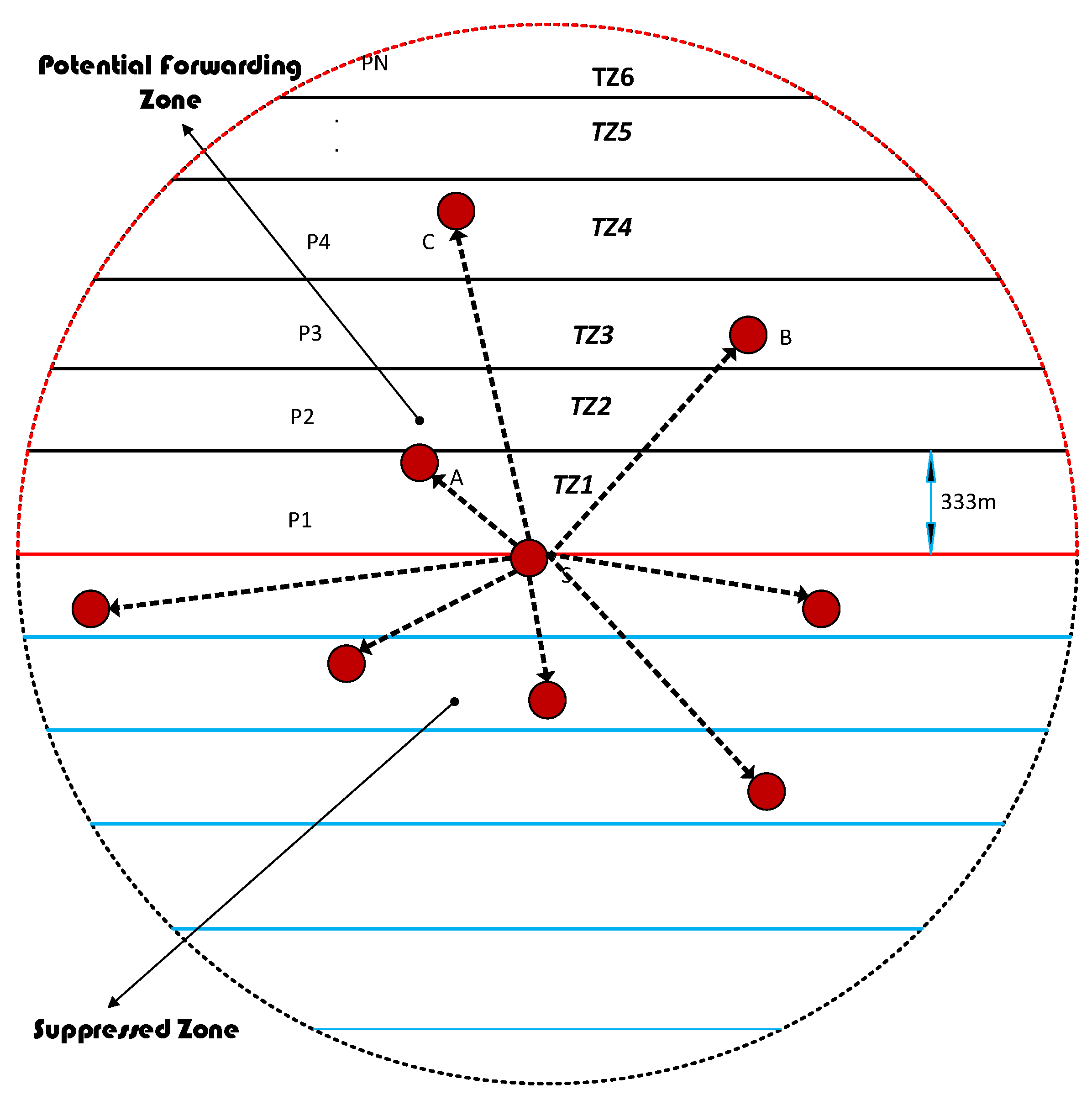
The proposed protocol divides the transmission range into six different transmission energy levels as shown in
Figure 5. For example, the next forwarder is close to the source node i.e., in transmission zone TZ1, then it will require less transmission energy. On the other hand, if the next potential forwarding node is far away in transmission range from the source node i.e., in TZ6, then higher transmission energy will be required. To increase the network lifetime, the proposed scheme uses different transmission power levels, which range from P1 to PN for broadcasting a DATA packet. The sender node floods a neighbor request message using power intensity level of PN. All the neighboring nodes receive the neighbor request message and reply with an acknowledgment packet. According to the acknowledgment packets received from different neighboring nodes from different transmission levels, the source node sets the transmission power. For example, from
Figure 5, the source node S broadcast a neighbor request with a power level PN. The node A in transmission zone TZ1, node B in TZ3 and node C in TZ4 level received the neighbor request. The nodes A, B, and C reply with the acknowledgment. The acknowledgment packet contains the depth field pertaining to the depth of the sender. According to the DP field in the acknowledgment packet, the source node found the nodes in different transmission levels. The node A is lying in transmission portion TZ1, node B placed transmission zone TZ3, while node C is in transmission zone TZ4. Thus, the node C has a smaller depth than all the other nodes. The source node sets the transmission power level to P4 for broadcasting the DATA packet and with this power level all the three nodes received the packet successfully. The nodes then calculate the holding time and set the timer according to their holding time.
4.7. Selection of a Forwarding Node among Suppressed Nodes
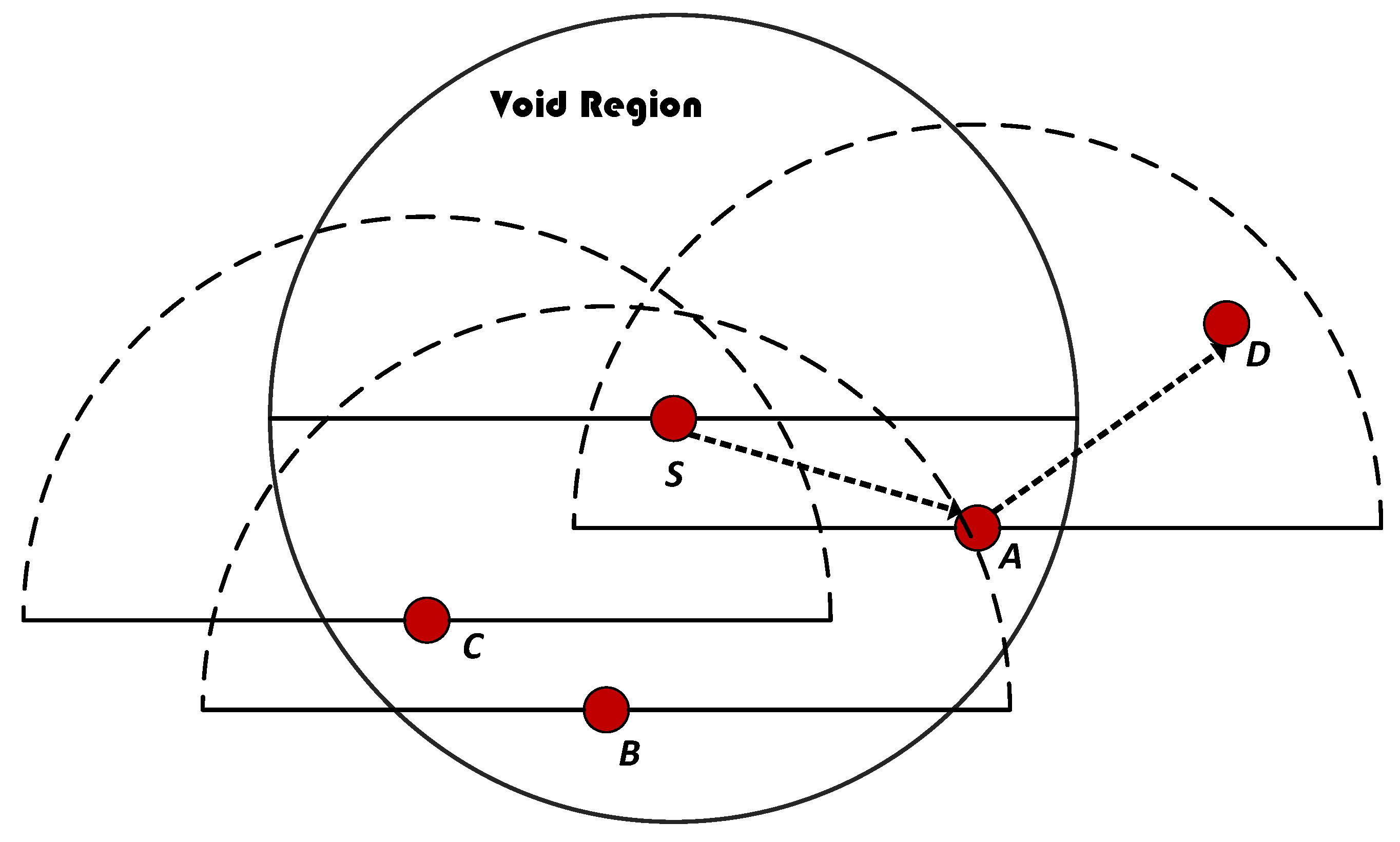
WDFAD-DBR selects the route based upon the weighting sum of depth difference between first and second hop PFNs. WDFAD-DBR drops the packet when there is no PFN(s) found and that means the data is lost. The source node S finds PFNs by sending a neighbor request packet. However, if the source node does not have any PFN, then the node for forwarding the packet will be selected from the suppressed nodes (refer to
Figure 6). The selection of suppressed node will be based on the depth and having PFN(s) other than the source node. The source node S will select node A for forwarding, which has smaller depth in suppressed nodes and also has a PFN D, which then continues broadcasting, ensuring minimum lost data.
4.8. Holding Time Estimation
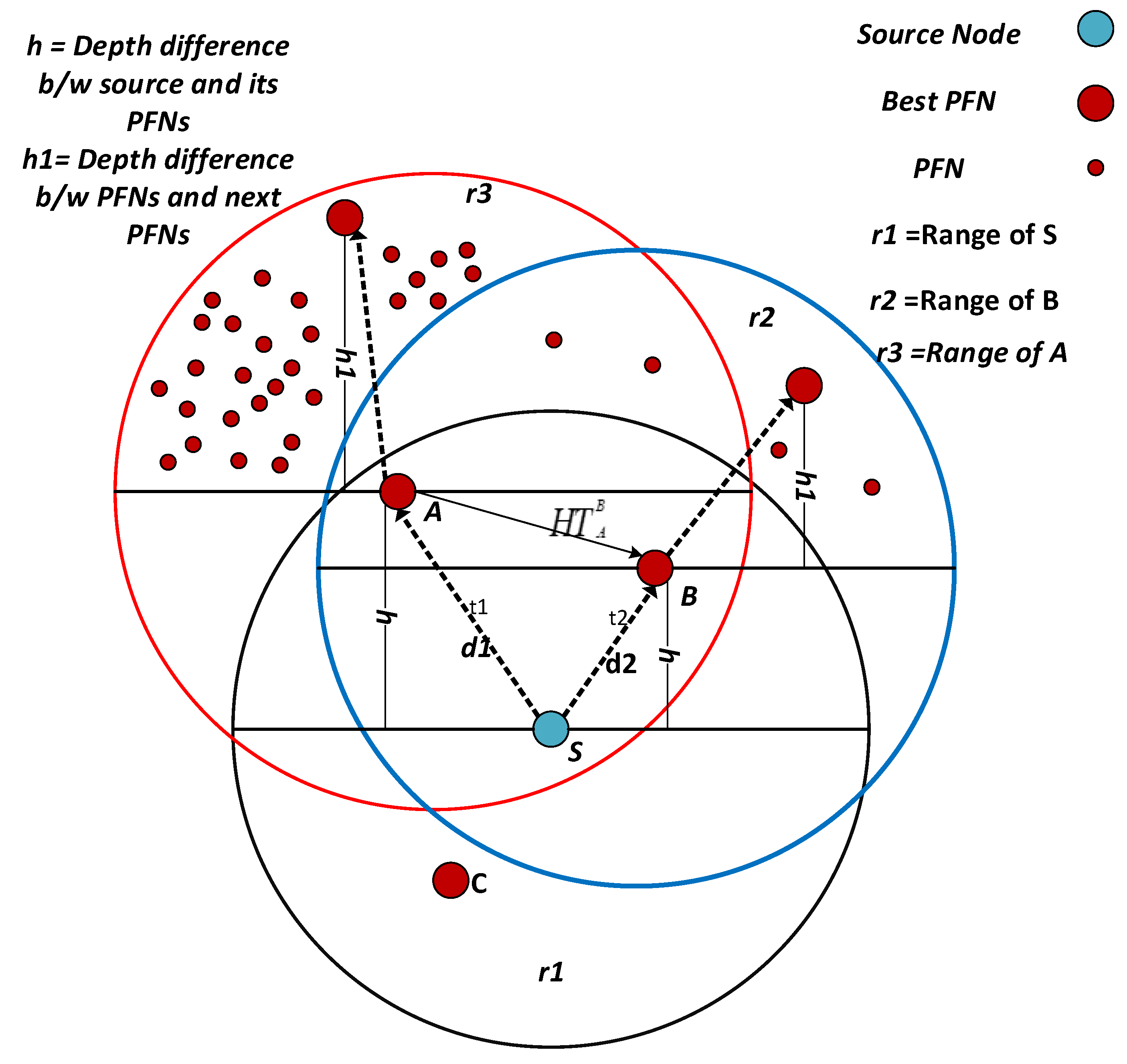
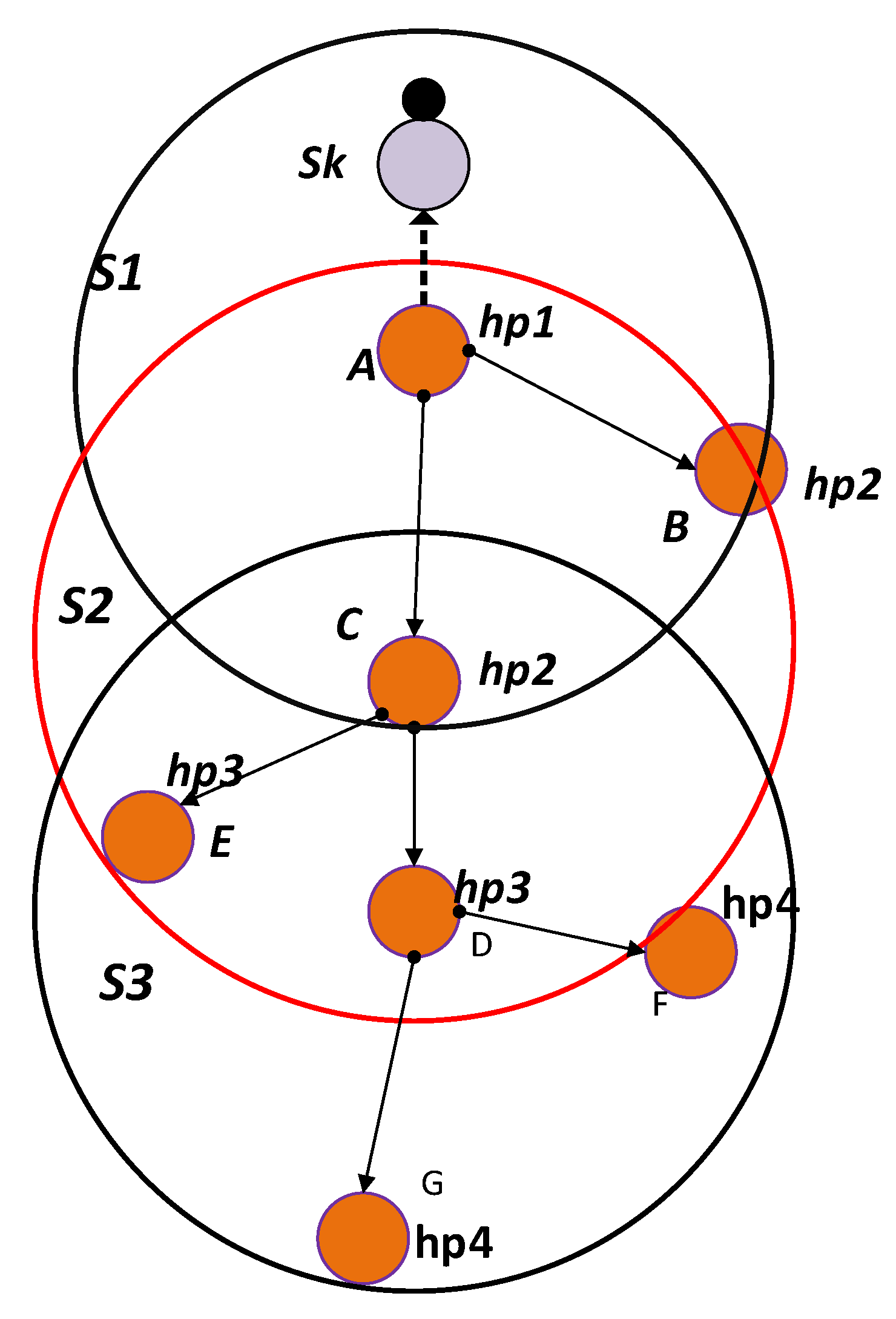
When neighbors of a source node receive data packets, it decodes and extracts the depth information of a source node and compares it with its own depth field DP. If DP value of the receiver is greater than DP value of the source node, and also the void announcement VA field has a value of 1, then it will forward the packet after necessary holding time calculation when no PFN is available to source. For the case, if PFNs are available, then each PFN will calculate the holding time according to the Fitness Function (HH) value, which is described below. The proposed scheme not only considers the sum of depth difference of the two hops (H), but also considers the number of PFNs (), number of suppressed nodes (), and the hop count from PFN to sink, which is best in favor of performance metrics. Thus, the proposed scheme will consider all of the above-mentioned factors in selecting the next forwarding node.
To find the Fitness Function (HH) value, we mapped the
,
into arbitrary values called as division factors represented by
and
, respectively. This is further elaborated in the simulation analysis section:
where
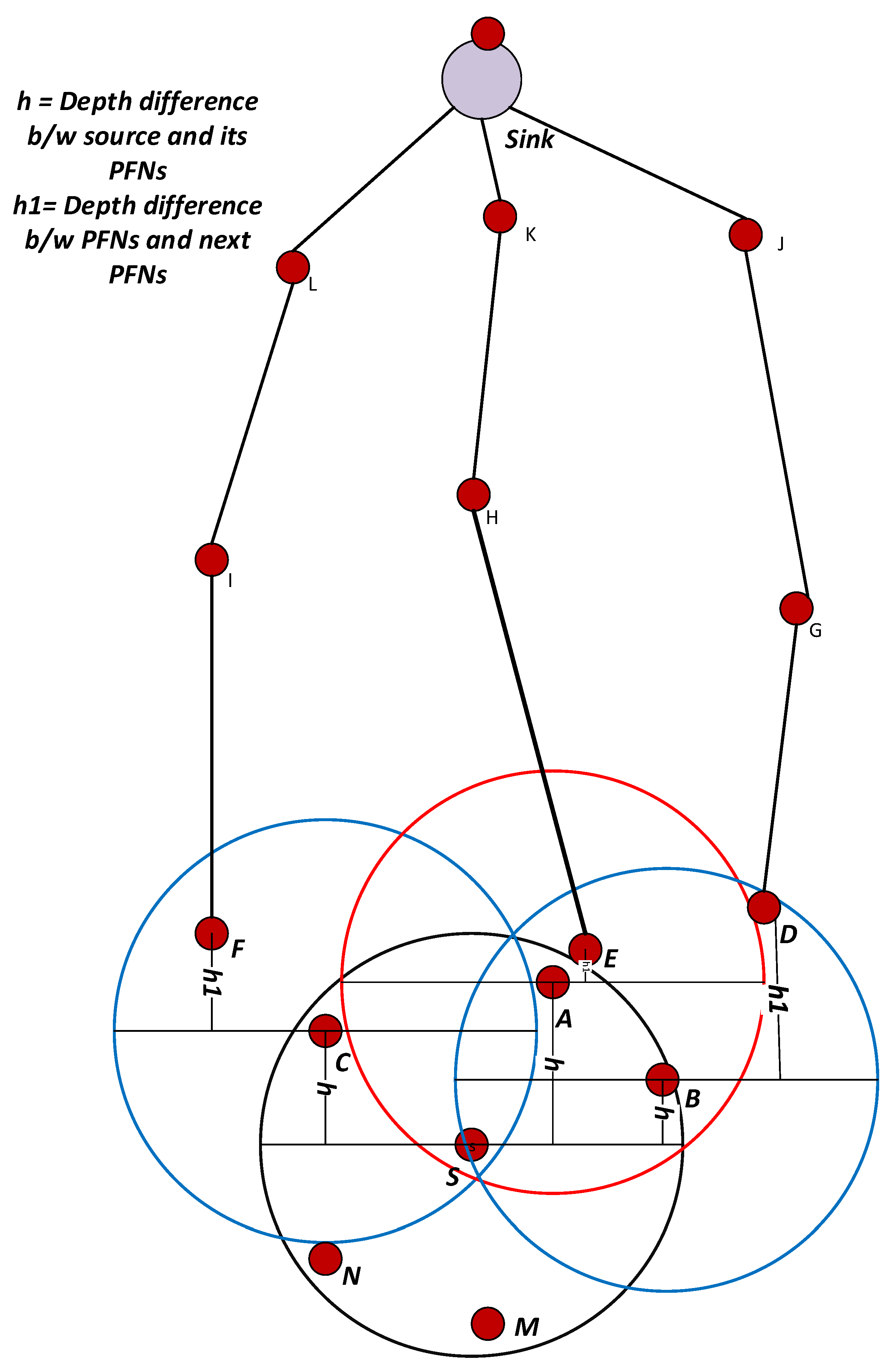
h is the depth difference of the source node to its PFN and
h1 is the depth difference of the PFN to the next expected hop and
is weighting coefficient and its value is between 0 and 1. For node A, h is the depth difference of the source node S and itself A and h1 is the depth difference of node A and E as shown in
Figure 7. The Fitness Function is then calculated as:
The holding time is a function of the fitness value:
Let
Figure 7 nodes A (transmission range specified by red circle), B and C have the same number of suppressed nodes.
For Node A: H = 8, = 8, = 4 so = 1.
For Node B: H = 16, = 90, = 4 so = 15.
For Node C: H = 12, = 40, = 4 so = 7.
According to WDFAD-DBR, node B will be selected as a next forwarder, but it has a large number of PFNs, which will consume a lot of receiving energy and generate a large number of duplicate packets. In DOW-PR protocol, the node having highest Fitness Function (HH) value will be selected as the next forwarder. Thus, Fitness Function (HH) calculates for Nodes A, B and C as follows:
If source node S broadcasts a packet, then all the neighbor nodes i.e., A, B, C, M and N shown in
Figure 7 acquire this packet. The suppressed nodes M and N will temporarily hold or drop the packet depending on the presence or absence of node(s) in Potential Forwarding Zone (PFZ). Nodes A, B and C are PFNs of source S and will compute the holding time and start timers. If a duplicate packet is not encountered until expiry of the timer, then this specific PFN will be selected and readily forward the packet. On the other hand, if it does not receive the duplicate, then it simply drops it. For the scenario, in which node A and B receives the packet at t1 and t2, respectively, and the duration of the packet propagated from A to B is t12. As fitness value (HH) for node A is greater than node B, then the following condition is satisfied:
The holding time between two neighboring nodes should be different in such a way that the forwarder node that has a greater fitness function (HH) value transmits the packet before the transmission of the same packet from other nodes. For instance, if node A has the highest fitness function value, then it will transmit prior to node B. Upon the receiving duplicate packet from node A, it simply drops the packet. The following equation must be satisfied to avoid duplicate packets:
Substituting Equation (
10) in Equation (13) results in:
According to the the triangle inequality theorem that the length of each side is less than sum of lengths of the other two sides, and greater than the difference between these lengths, thus
is always less than 0, and, as
, thus k is always a negative number. The above two inequalities will be satisfied if:
For the worst case, the value of k will be:
where
is the propagation speed of acoustic signal and R is the maximum transmission range. The value of
k varies between 0 and R, as it depends on (
) and
[0 R].
k cannot always satisfy the above inequality in Equation (
14) as
when
. If we replace the (
) by a global variable
such that
, then it guarantees that node A will forward the packet before node B. Hence,
To find
, we consider that the node having the minimum Fitness Function (HH) value will have the holding time approximately zero; therefore, from Equation (
10),
By solving the equation and putting the values in (
10), we have:
The node having the highest fitness function (HH) value will be selected as a next forwarder. For instance, node A will calculate the holding time and start timer. When the timer is expired, then node A will forward the packet. If the other nodes in the range of A, i.e., B receives the duplicate packet during the holding time, it will drop both the packets because it means the original packet is already transmitted. The holding time is inversely proportional to , if we select larger , then the holding time will decreases and therefore end-to-end delay will also reduce. Along with this improvement, there is also reduction in energy consumption that has been noticed and this is due to optimal forwarder selection at each.
4.9. Whale Pods Routing Protocol
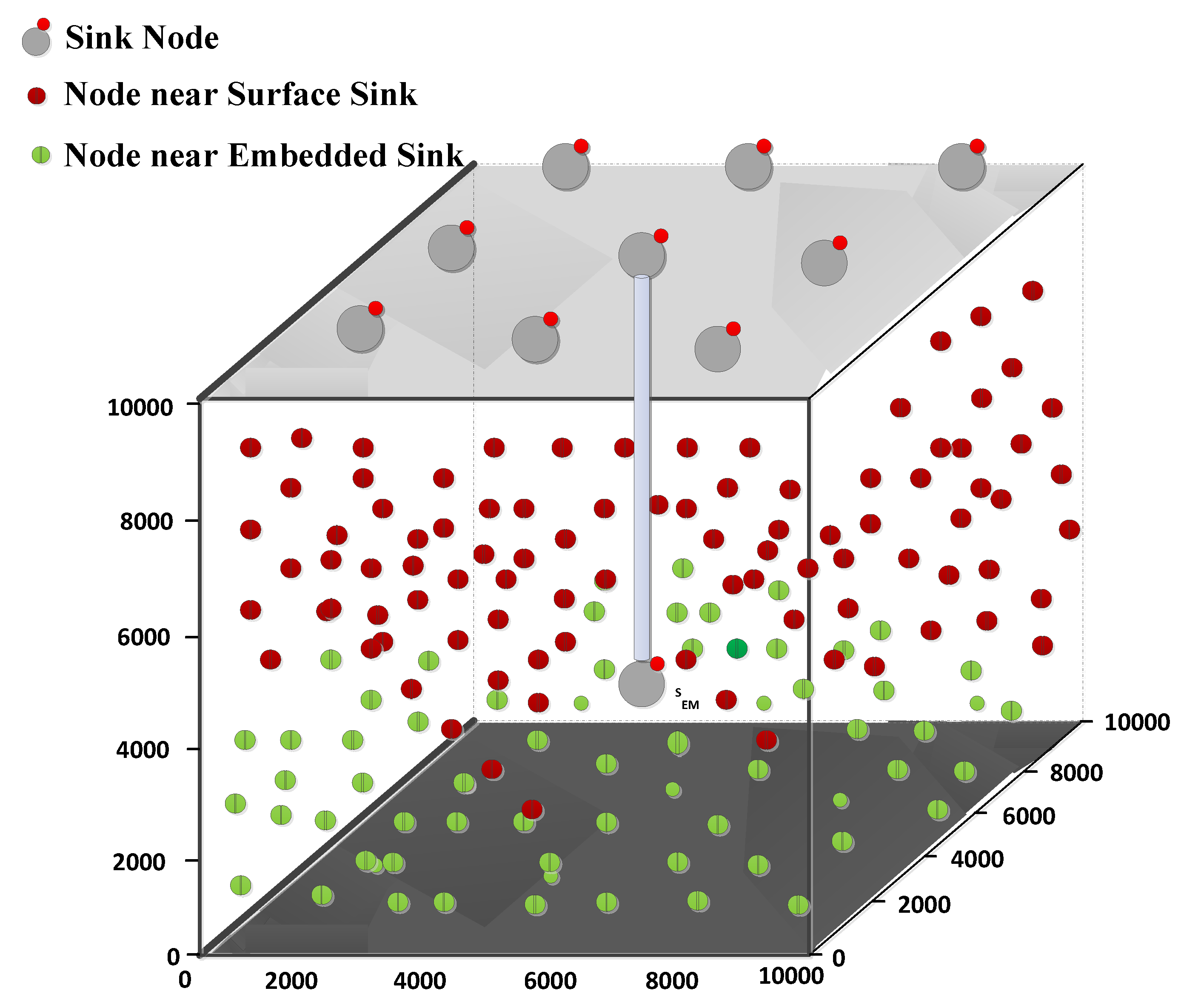
Our proposed DOW-PR scheme divides the whole transmission region into two levels of nodes distribution. One level in which the nodes are in closest proximity to the surface sinks and the other is the nodes that are in closest proximity to the sink deployed underwater. There are nine sinks that are placed at the sea surface, while one is placed inside the water. The anchored nodes are fixed at the bottom that can generate and transmit a packet towards PFZ. The relay nodes are transportable with the water current in horizontal direction. These nodes are capable of generating, forwarding and receiving a packet from other nodes. Whenever the node transmits or receives a packet, the first and foremost step followed by the forwarder is to calculate its distance with the sink set D. The node compares the distance between itself and the rest of the sinks from the set D sequentially and finds PFNs lying in the hemisphere in the direction of the minimal distinct sink. The direction of data packet flow will be towards the sink lying at its closest proximity. If the separation between forwarding node and sink deployed on the sea surface is less than the sink deployed underwater, then the holding time computation will be carried out for the nodes present in the hemisphere in the direction of the surface sink D. On the other hand, if the source node is in closest proximity to the embedded sink , then the holding time computation will be carried out for the nodes present in the hemisphere in the direction of the embedded sink .
The above-mentioned phenomena can be further elaborated by a scenario shown in
Figure 8. For example, in the network initialization phase, node N1 will first lookup for a sink in its closest proximity. For instance, after necessary computation in the initialization phase, it finds embedded sink
is the nearest sink i.e.,
. Node N1 will identify the PFNs in the hemisphere centered on the virtual vector connecting it with sink
. The best forwarder node will be selected using the same holding time computation described earlier in the dolphin pod technique. Likewise, if node A in
Figure 8 has
, then it will find PFNs in the direction of the surface sink D. Algorithm 1 described the best forwarder selection technique i.e., valid for both dolphin pods routing and whale pods routing protocol.
| Algorithm 1: Algorithm for selecting the forwarder among potential forwarding nodes. |
![Sensors 18 01529 i001]() |




















{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}