Efficient Convex Optimization for Energy-Based Acoustic Sensor Self-Localization and Source Localization in Sensor Networks

Abstract
:1. Introduction
1.1. Related Work
1.2. Contributions
- For sensor self-localization, a so-called direct norm relaxation and SDR, respectively, are utilized to convert both the nonconvex ML optimization problems and minimax optimization problems into convex ones. These two kinds of relaxations are compared and analyzed.
- For source localization, the ML and minimax optimization formulations based on transmission power-elimination are derived. Based on such formulations, two source localization methods are developed by utilizing the direct norm relaxation and SDR, respectively.
- The Cramér–Rao Low Bound (CRLB) of the energy-based source localization with any energy decay factor for both the sensor self-localization and the source localization is given.
2. Problem Statement
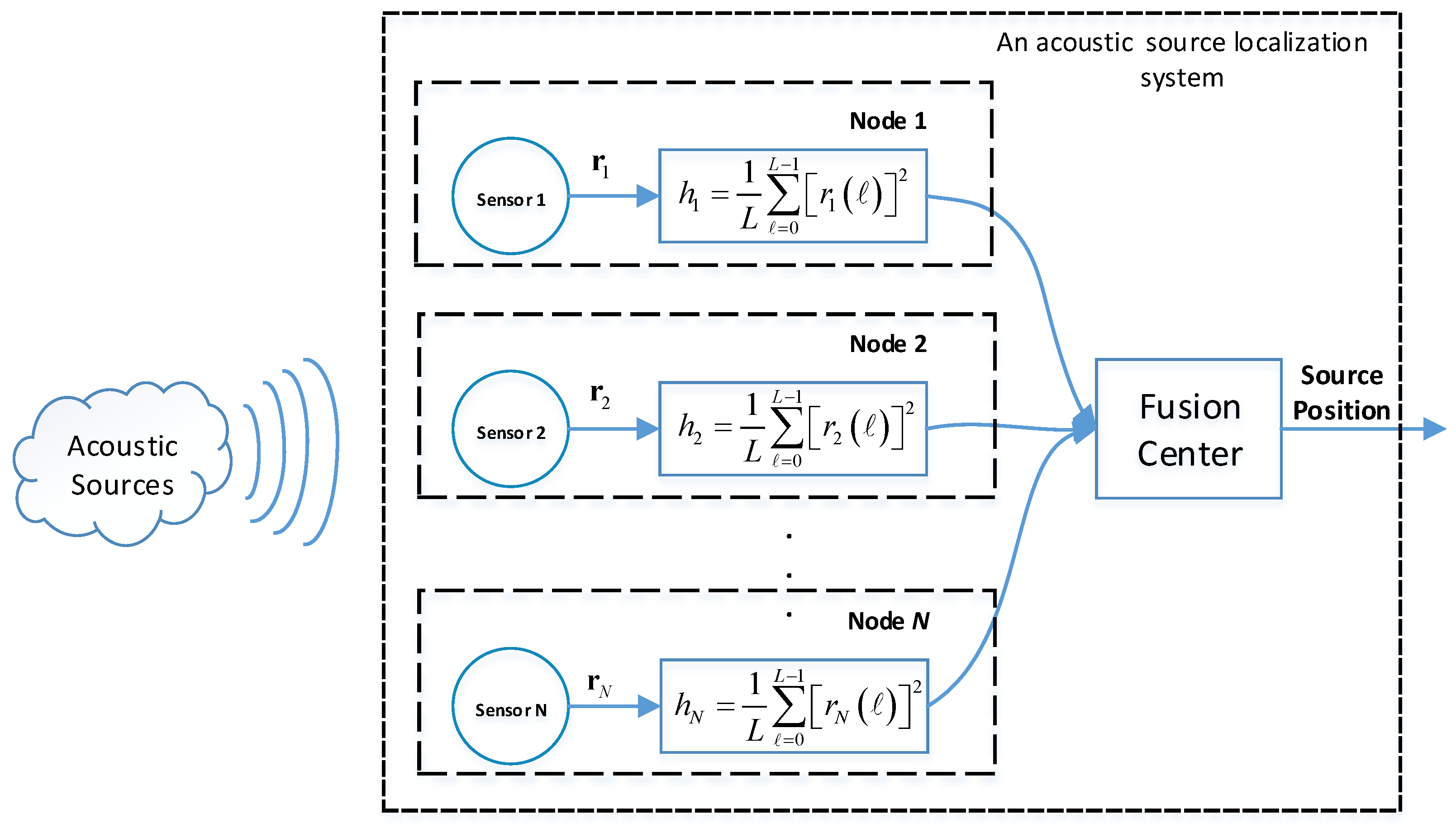
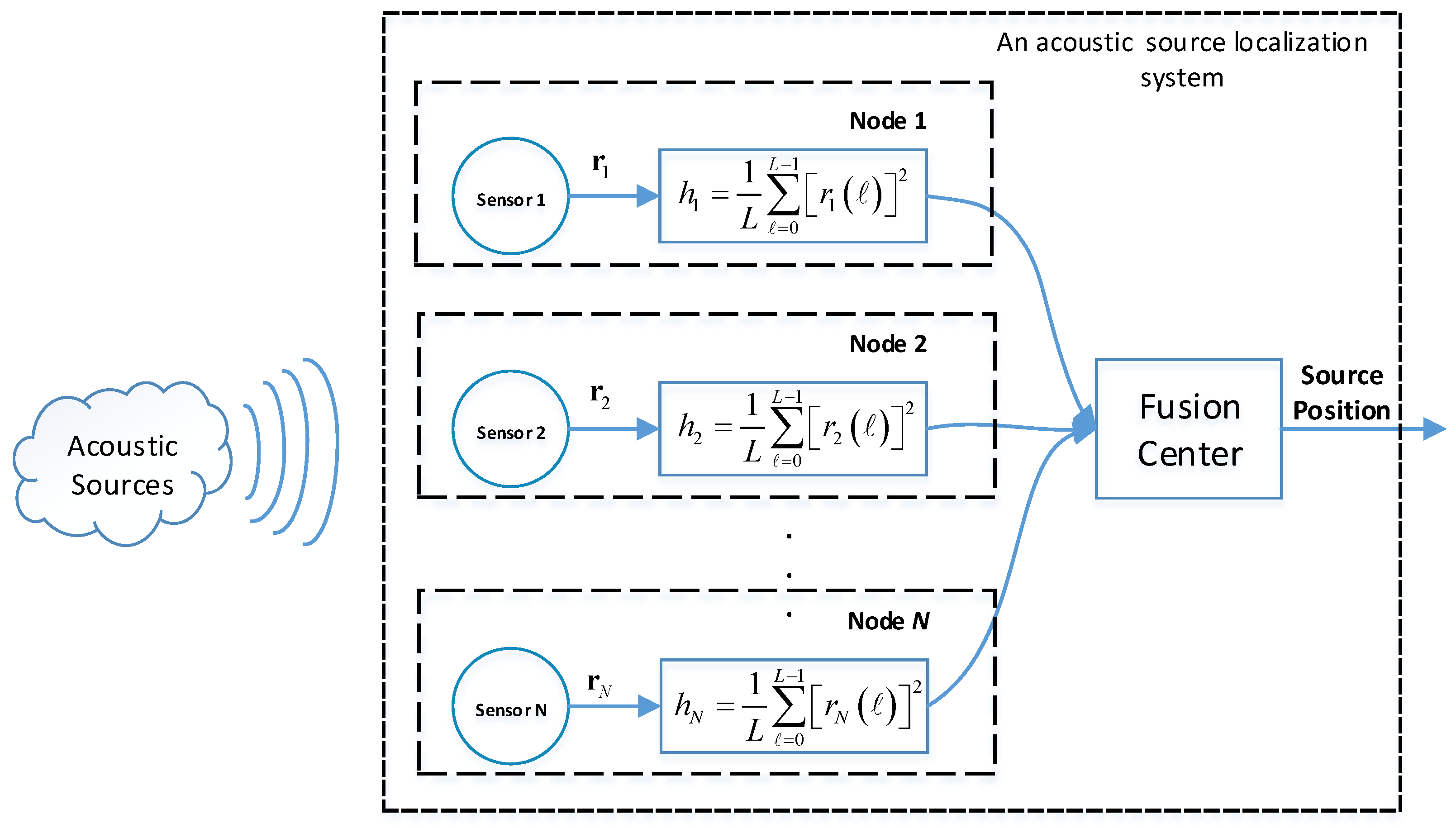
2.1. System Model
2.2. Real Scenario Considerations
3. Sensor Self-Localization with Known Transmission Power
3.1. Sensor Self-Localization under Maximum Likelihood Criterion
3.1.1. Direct Norm Relaxation
3.1.2. Semidefinite Relaxation
3.2. Sensor Self-Localization under Minimax Criterion
3.2.1. Direct Norm Relaxation
3.2.2. Semidefinite Relaxation
4. Source Localization with Unknown Transmission Power
4.1. Source Localization under Maximum Likelihood Criterion
- when , the term is
- when , the term is
4.1.1. Direct Norm Relaxation
4.1.2. Semidefinite Relaxation
4.2. Source Localization under Minimax Criterion
4.2.1. Direct Norm Relaxation
4.2.2. Semidefinite Relaxation
5. Cramér–Rao Low Bound (CRLB) of the Energy-Based Source Localization
6. Simulation Results
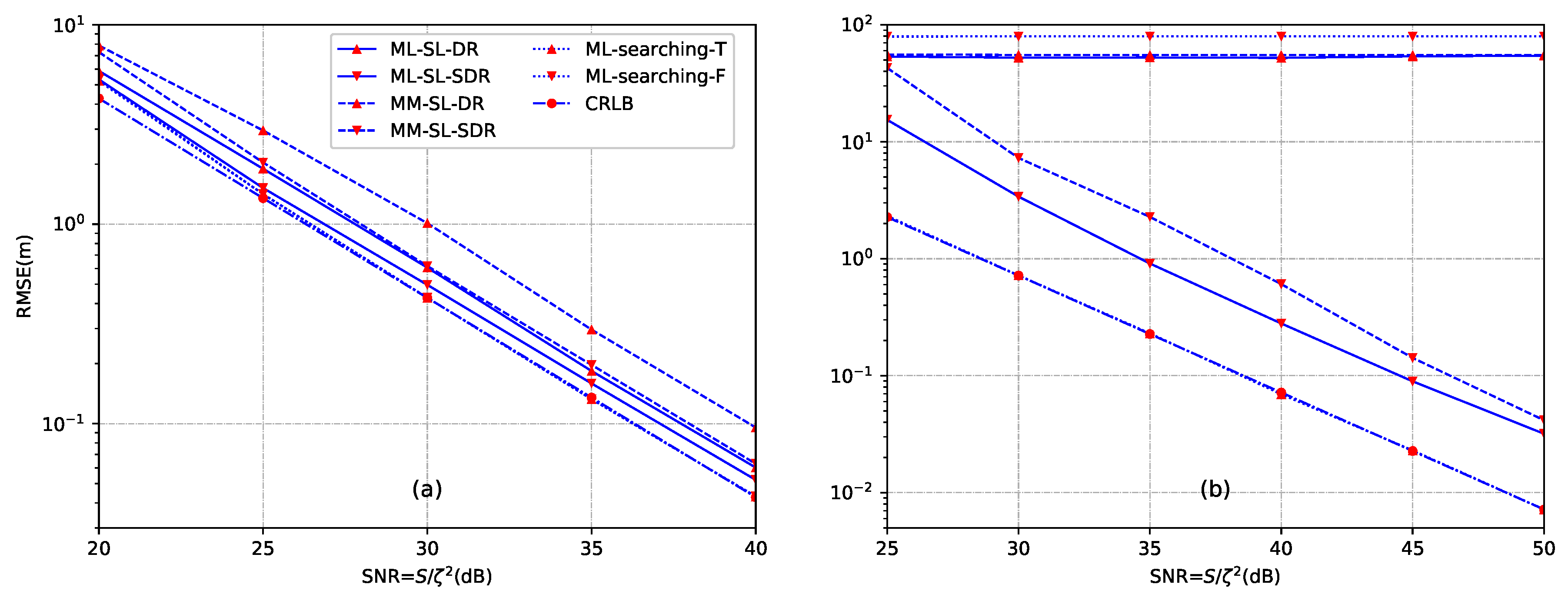
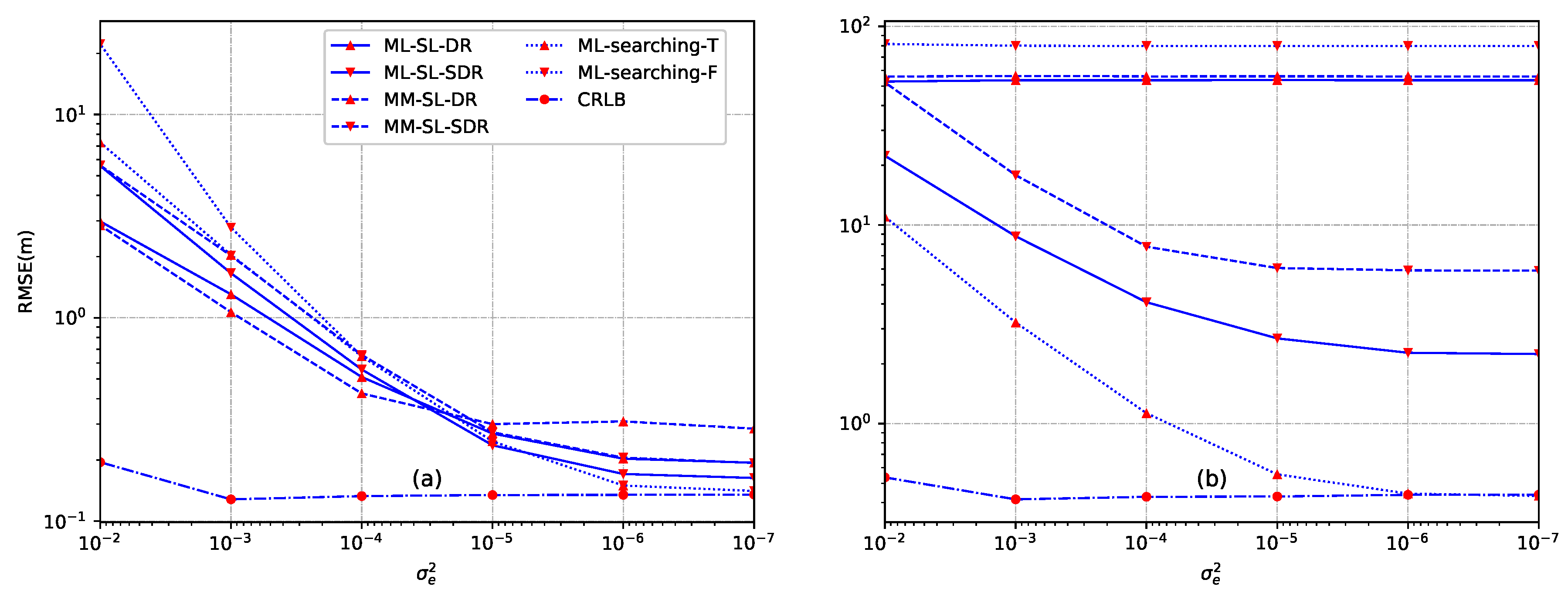
6.1. Performance Analysis of the Sensor Self-Localization
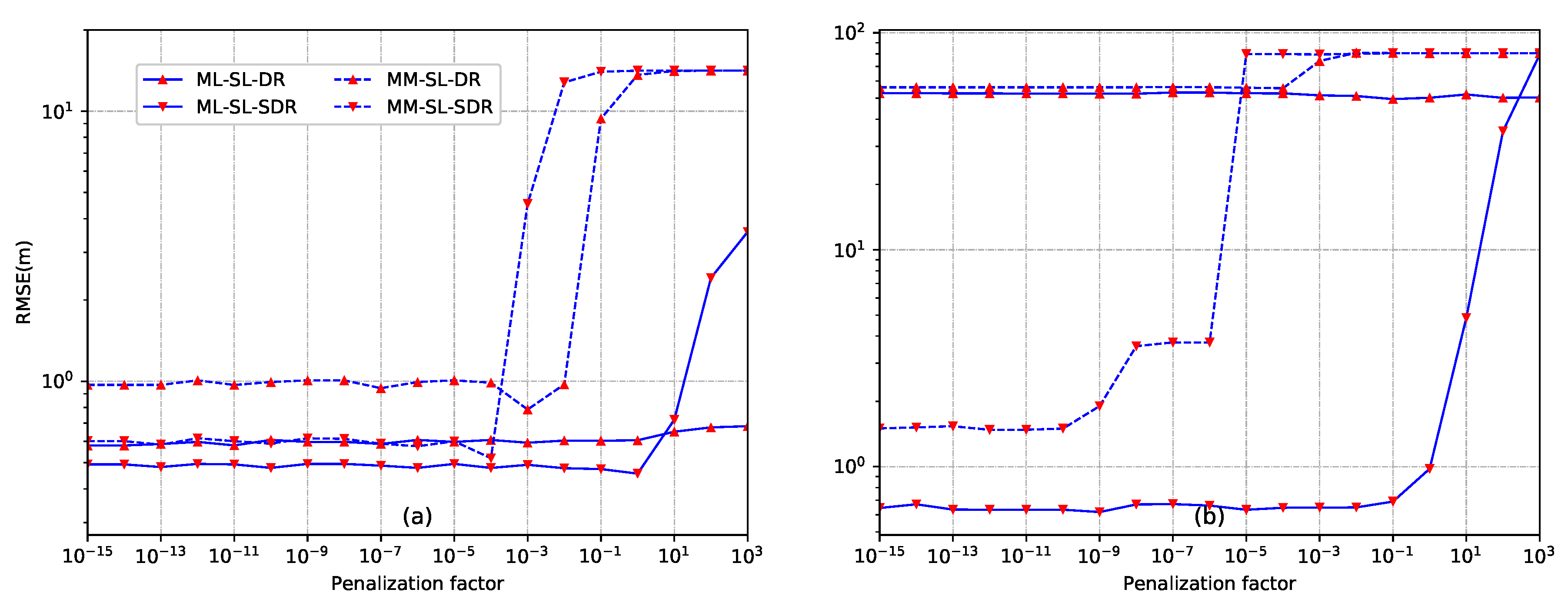
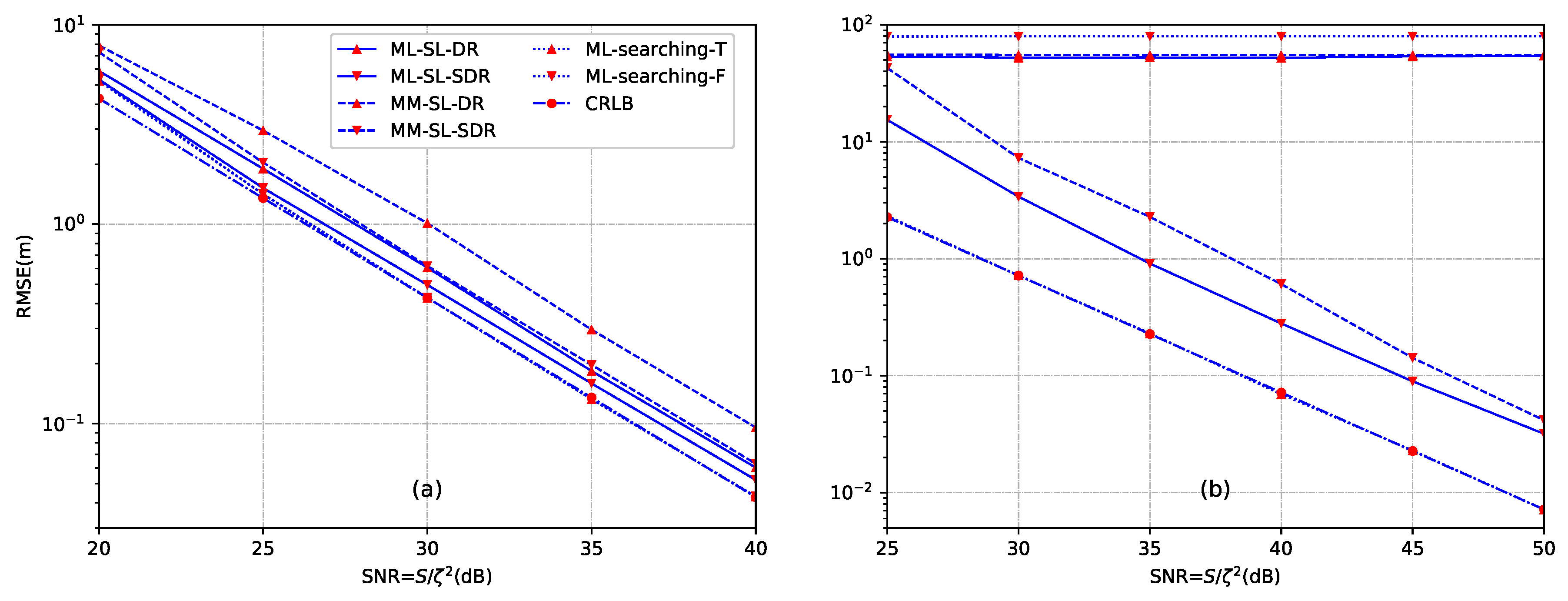
- The proposed SDR-based source localization methods, especially ML-SL-SDR, provide superior performance for the cases of both inside convex hull formed by sensors and outside convex hull. ML-SL-SDR exhibits better performance than MM-SL-SDR since the distribution of energy noise is utilized to improve the accuracy of source localization.
- For the case of inside convex hull, the proposed direct norm relaxation based methods provide a robust estimate against the estimated error of the energy decay factor noise. For the case of outside convex hull, SDR-based methods can give robust source location estimate.
- When the sensors and the source are randomly and uniformly distributed in a square region, the proposed MM-SL-SDR provides robust performance in a wide range of SNR, sampling number L, energy decay factor and number of sensors N. Moreover, ML-SL-SDR outperforms MM-SL-SDR for the whole range of and N, and for SNR dB and .
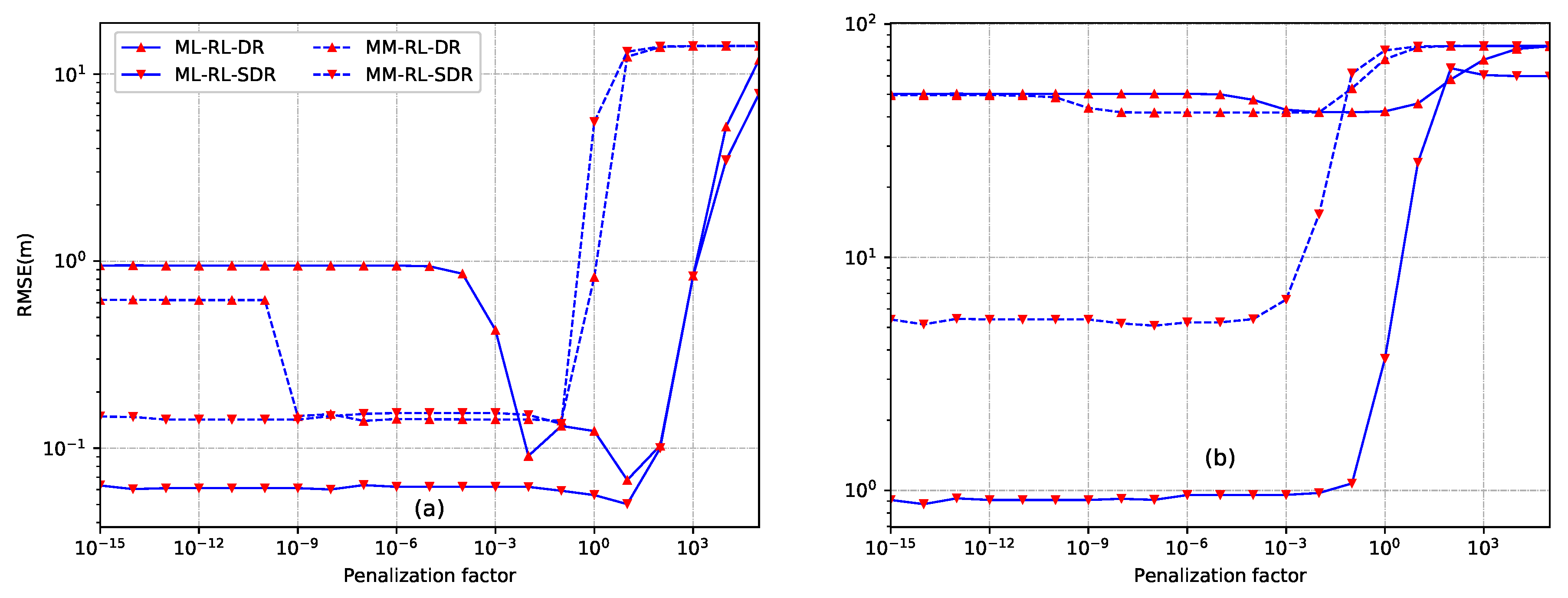
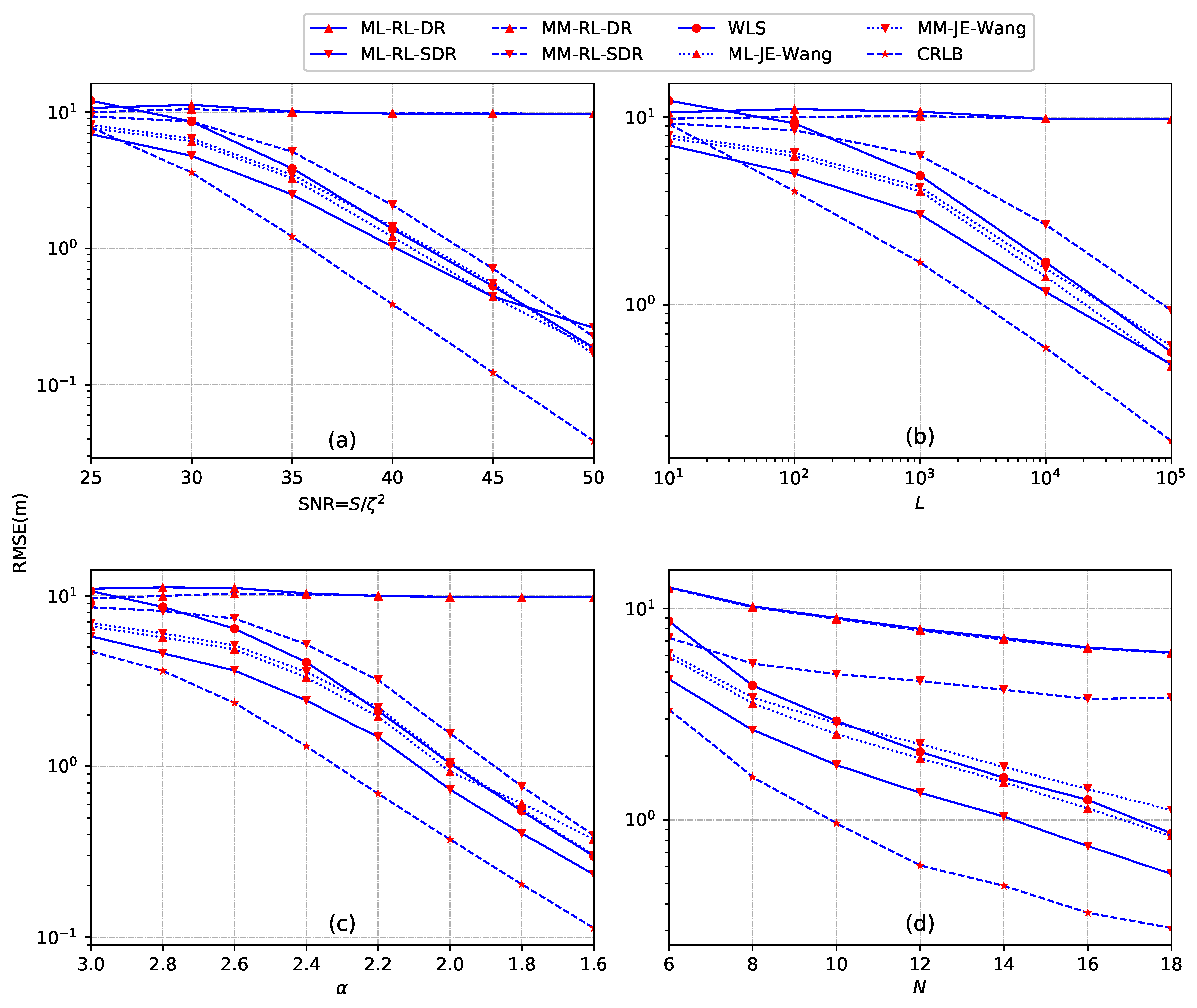
6.2. Performance Analysis for the Source Localization
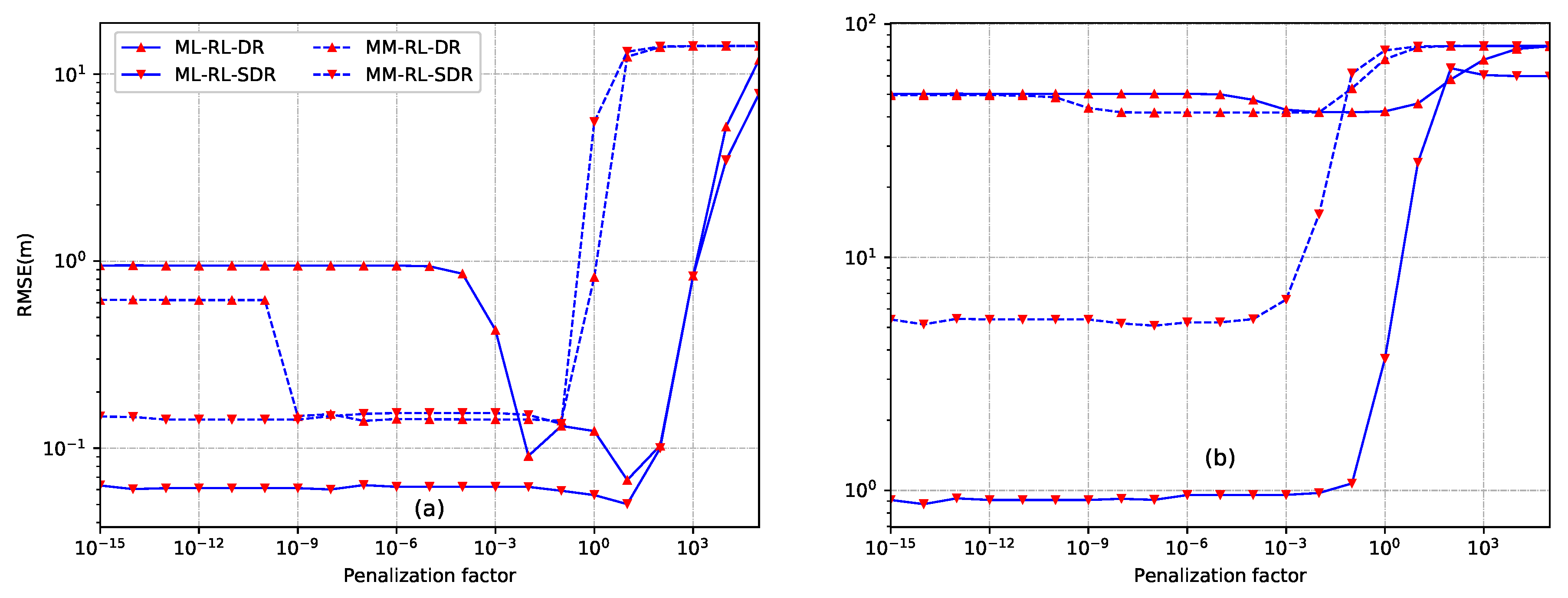
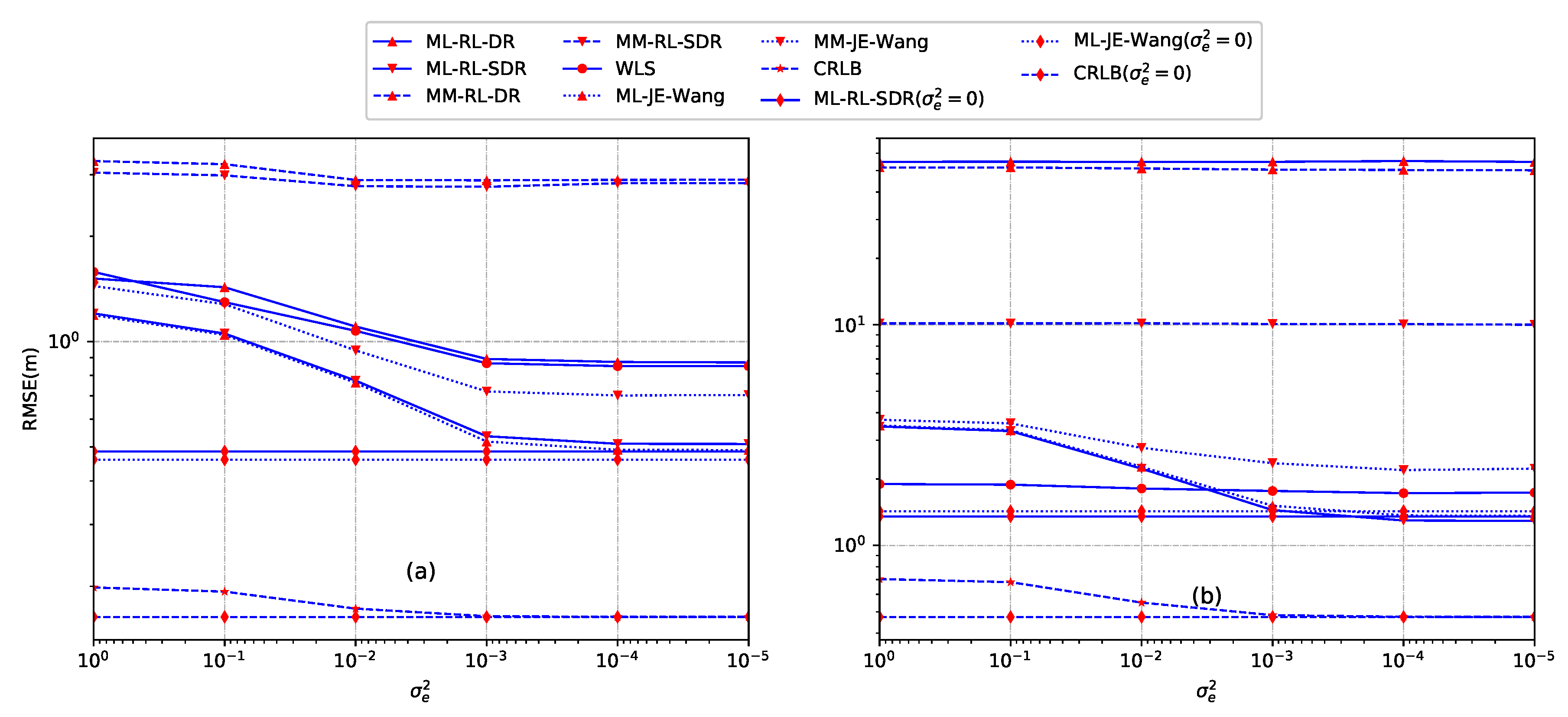
- The proposed SDR-based source localization methods, especially ML-RL-SDR, provide a comparable source location estimate for both the case of inside convex hull formed by sensors and the case of outside convex hull. In comparison, the proposed direct norm relaxation based source methods failed to provide accurate source location estimate when the source is located outside the convex hull.
- The proposed SDR-based source localization methods, as well as extended ML-JE-Wang and MM-JE-Wang provide a robust estimate against errors of the energy decay factor noise.
- When the sensors and the source are randomly and uniformly distributed in a square region, the proposed ML-RL-SDR provides superior performance in a wide range of SNR, sampling number L, energy decay factor and number of sensors N.
7. Conclusions
Author Contributions
Funding
Conflicts of Interest
References
- Srbinovska, M.; Gavrovski, C.; Dimcev, V.; Krkoleva, A.; Borozan, V. Environmental parameters monitoring in precision agriculture using wireless sensor networks. J. Clean. Prod. 2015, 88, 297–307. [Google Scholar] [CrossRef]
- Wu, M.; Tan, L.; Xiong, N. Data prediction, compression, and recovery in clustered wireless sensor networks for environmental monitoring applications. Inf. Sci. 2016, 329, 800–818. [Google Scholar] [CrossRef]
- Du, R.; Chen, C.; Yang, B.; Lu, N.; Guan, X.; Shen, X. Effective urban traffic monitoring by vehicular sensor networks. IEEE Trans. Veh. Technol. 2015, 64, 273–286. [Google Scholar] [CrossRef]
- Kumar, N.; Misra, S.; Obaidat, M.S. Collaborative learning automata-based routing for rescue operations in dense urban regions using vehicular sensor networks. IEEE Syst. J. 2015, 9, 1081–1090. [Google Scholar] [CrossRef]
- Sheng, X.; Hu, Y.H. Maximum likelihood multiple-source localization using acoustic energy measurements with wireless sensor networks. IEEE Trans. Signal Process. 2005, 53, 44–53. [Google Scholar] [CrossRef]
- Yan, Y.; Wang, H.; Shen, X.; Zhong, X. Decision Fusion with Channel Errors in Distributed Decode-Then-Fuse Sensor Networks. Sensors 2015, 15, 19157–19180. [Google Scholar] [CrossRef] [PubMed]
- Yan, Y.; Wang, H.; Xue, T.; Wang, X. Optimal local sensor decision rule for target detection with channel fading statistics in multi-sensor networks. J. Frankl. Instit. 2017, 354, 530–555. [Google Scholar] [CrossRef]
- Zou, T.; Li, Z.; Li, S.; Lin, S. Adaptive Energy-Efficient Target Detection Based on Mobile Wireless Sensor Networks. Sensors 2017, 17, 1028. [Google Scholar]
- Yu, Y. Distributed target tracking in wireless sensor networks with data association uncertainty. IEEE Commun. Lett. 2017, 21, 1281–1284. [Google Scholar] [CrossRef]
- Pak, J.M.; Ahn, C.K.; Shi, P.; Shmaliy, Y.S.; Lim, M.T. Distributed hybrid particle/FIR filtering for mitigating NLOS effects in TOA-based localization using wireless sensor networks. IEEE Trans. Ind. Electron. 2017, 64, 5182–5191. [Google Scholar] [CrossRef]
- Gao, S.; Zhang, F.; Wang, G. NLOS Error Mitigation for TOA-Based Source Localization with Unknown Transmission Time. IEEE Sens. J. 2017, 17, 3605–3606. [Google Scholar] [CrossRef]
- Xu, E.; Ding, Z.; Dasgupta, S. Source localization in wireless sensor networks from signal time-of-arrival measurements. IEEE Trans. Signal Process. 2011, 59, 2887–2897. [Google Scholar] [CrossRef]
- Shen, H.; Ding, Z.; Dasgupta, S.; Zhao, C. Multiple Source Localization in Wireless Sensor Networks Based on Time of Arrival Measurement. IEEE Trans. Signal Process. 2014, 62, 1938–1949. [Google Scholar] [CrossRef]
- Xu, E.; Ding, Z.; Dasgupta, S. Reduced complexity semidefinite relaxation algorithms for source localization based on time difference of arrival. IEEE Trans. Mob. Comput. 2011, 10, 1276–1282. [Google Scholar] [CrossRef]
- Huang, B.; Xie, L.; Yang, Z. TDOA-based source localization with distance-dependent noises. IEEE Trans. Wirel. Commun. 2015, 14, 468–480. [Google Scholar] [CrossRef]
- Zou, Y.; Liu, H.; Xie, W.; Wan, Q. Semidefinite Programming Methods for Alleviating Sensor Position Error in TDOA Localization. IEEE Access 2017, 5, 23111–23120. [Google Scholar] [CrossRef]
- Ho, K. Bias reduction for an explicit solution of source localization using TDOA. IEEE Trans. Signal Process. 2012, 60, 2101–2114. [Google Scholar] [CrossRef]
- Yan, Q.; Chen, J.; Ottoy, G.; Cox, B.; De Strycker, L. An accurate AOA localization method based on unreliable sensor detection. In Proceedings of the 2018 IEEE Sensors Applications Symposium (SAS), Seoul, Korea, 12–14 March 2018; pp. 1–6. [Google Scholar]
- So, H.C.; Lin, L. Linear Least Squares Approach for Accurate Received Signal Strength Based Source Localization. IEEE Trans. Signal Process. 2011, 59, 4035–4040. [Google Scholar] [CrossRef]
- Tomic, S.; Beko, M.; Dinis, R. RSS-based localization in wireless sensor networks using convex relaxation: Noncooperative and cooperative schemes. IEEE Trans. Veh. Technol. 2015, 64, 2037–2050. [Google Scholar] [CrossRef]
- Ouyang, R.W.; Wong, A.S.; Lea, C.T. Received signal strength-based wireless localization via semidefinite programming: Noncooperative and cooperative schemes. IEEE Trans. Veh. Technol. 2010, 59, 1307–1318. [Google Scholar] [CrossRef]
- Li, D.; Hu, Y.H. Energy-based collaborative source localization using acoustic microsensor array. EURASIP J. Appl. Signal Process. 2003, 2003, 321–337. [Google Scholar] [CrossRef]
- Meng, W.; Xiao, W.; Xie, L. An efficient EM algorithm for energy-based multisource localization in wireless sensor networks. IEEE Trans. Instrum. Meas. 2011, 60, 1017–1027. [Google Scholar] [CrossRef]
- Meesookho, C.; Mitra, U.; Narayanan, S. On energy-based acoustic source localization for sensor networks. IEEE Trans. Signal Process. 2008, 56, 365–377. [Google Scholar] [CrossRef]
- Yan, Y.; Wang, H.; Wang, X. A novel least-squares method of source localization based on acoustic energy measurements for UWSN. In Proceedings of the 2011 IEEE International Conference on Signal Processing, Communications and Computing (ICSPCC), Xi’an, China, 14–16 September 2011; pp. 1–5. [Google Scholar]
- Yan, Y.; Wang, H.; Shen, X.; Yang, F.; Chen, Z. Efficient convex optimization method for underwater passive source localization based on RSS with WSN. In Proceedings of the 2012 IEEE International Conference on Signal Processing, Communication and Computing (ICSPCC 2012), Hong Kong, China, 12–15 August 2012; pp. 171–174. [Google Scholar]
- Wang, G. A semidefinite relaxation method for energy-based source localization in sensor networks. IEEE Trans. Veh. Technol. 2011, 60, 2293–2301. [Google Scholar] [CrossRef]
- Wang, G.; Li, Y.; Wang, R. New Semidefinite Relaxation Method for Acoustic Energy-Based Source Localization. IEEE Sens. J. 2013, 13, 1514–1521. [Google Scholar] [CrossRef]
- Yuan, J.; Ai, W.; Deng, H.; Shuai, T.; Zhao, X. Exact solution of an approximate weighted least squares estimate of energy-based source localization in sensor networks. IEEE Trans. Veh. Technol. 2015, 64, 4645–4654. [Google Scholar] [CrossRef]
- Lohrasbipeydeh, H.; Gulliver, A.; Amindavar, H. A minimax SDP method for energy based source localization with unknown transmit power. IEEE Wirel. Commun. Lett. 2014, 3, 433–436. [Google Scholar] [CrossRef]
- Meng, C.; Ding, Z.; Dasgupta, S. A semidefinite programming approach to source localization in wireless sensor networks. IEEE Signal Process. Lett. 2008, 15, 253–256. [Google Scholar] [CrossRef]
- Cheng, C.; Hu, W.; Tay, W.P. Localization of a moving non-cooperative RF target in NLOS environment using RSS and AOA measurements. In Proceedings of the 2015 IEEE International Conference on Acoustics, Speech and Signal Processing (ICASSP), Brisbane, Australia, 19–24 April 2015; pp. 3581–3585. [Google Scholar]
- Tomic, S.; Beko, M.; Dinis, R.; Montezuma, P. Distributed algorithm for target localization in wireless sensor networks using RSS and AoA measurements. Pervasive Mob. Comput. 2017, 37, 63–77. [Google Scholar] [CrossRef]
- Sivrikaya, F.; Yener, B. Time synchronization in sensor networks: a survey. IEEE Netw. 2004, 18, 45–50. [Google Scholar] [CrossRef]
- Luo, Z.Q.; Ma, W.K.; So, A.C.; Ye, Y.; Zhang, S. Semidefinite relaxation of quadratic optimization problems. IEEE Signal Process. Mag. 2010, 27, 20–34. [Google Scholar] [CrossRef]
- Boyd, S.; Vandenberghe, L. Convex Optimization; Cambridge University Press: Cambridge, UK, 2004. [Google Scholar]
- Ozdemir, O.; Niu, R.; Varshney, P.K. Channel aware target localization with quantized data in wireless sensor networks. IEEE Trans. Signal Process. 2009, 57, 1190–1202. [Google Scholar] [CrossRef]
- Sundaresan, A.; Varshney, P.K. Location estimation of a random signal source based on correlated sensor observations. IEEE Trans. Signal Process. 2011, 59, 787–799. [Google Scholar] [CrossRef]
- Luo, Z.; Jannett, T.C. Energy-based target localization in multi-hop wireless sensor networks. In Proceedings of the 2012 IEEE Radio and Wireless Symposium, Santa Clara, CA, USA, 15–18 January 2012; pp. 243–246. [Google Scholar]
- Yang, X.; Niu, R.; Masazade, E.; Varshney, P.K. Channel-aware tracking in multi-hop wireless sensor networks with quantized measurements. IEEE Trans. Aerosp. Electron. Syst. 2013, 49, 2353–2368. [Google Scholar] [CrossRef]
- Sturm, J.F. Using SeDuMi 1.02, a MATLAB toolbox for optimization over symmetric cones. Optim. Methods Softw. 1999, 11, 625–653. [Google Scholar] [CrossRef]
- Toh, K.C.; Todd, M.J.; Tütüncü, R.H. On the implementation and usage of SDPT3–a Matlab software package for semidefinite-quadratic-linear programming, version 4.0. In Handbook on Semidefinite, Conic and Polynomial Optimization; Springer: Boston, MA, USA, 2012; pp. 715–754. [Google Scholar]
- Grant, M.; Boyd, S. CVX: Matlab Software for Disciplined Convex Programming, Version 2.1 (2014). 2014. Available online: http://cvxr.com/cvx (accessed on 20 October 2016).
- Lagarias, J.C.; Reeds, J.A.; Wright, M.H.; Wright, P.E. Convergence properties of the Nelder–Mead simplex method in low dimensions. SIAM J. Optim. 1998, 9, 112–147. [Google Scholar] [CrossRef]




{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Algorithm | Average CPU Estimation Time (ms) |
|---|---|
| ML-SL-DR | 404.2 |
| ML-SL-SDR | 200.6 |
| MM-SL-DR | 340.4 |
| MM-SL-SDR | 197.6 |
| ML-Searching-T | 4.8 |
| ML-Searching-F | 8.2 |
| Algorithm | Average CPU Estimation Time (ms) |
|---|---|
| ML-RL-DR | 631.9 |
| ML-RL-SDR | 235.6 |
| MM-RL-DR | 368.8 |
| MM-RL-SDR | 243.9 |
| WLS | 6.8 |
| ML-JE-Wang | 245.0 |
| MM-JE-Wang | 295.9 |
© 2018 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Yan, Y.; Wang, H.; Shen, X.; Leng, B.; Li, S. Efficient Convex Optimization for Energy-Based Acoustic Sensor Self-Localization and Source Localization in Sensor Networks. Sensors 2018, 18, 1646. https://doi.org/10.3390/s18051646
Yan Y, Wang H, Shen X, Leng B, Li S. Efficient Convex Optimization for Energy-Based Acoustic Sensor Self-Localization and Source Localization in Sensor Networks. Sensors. 2018; 18(5):1646. https://doi.org/10.3390/s18051646
Chicago/Turabian StyleYan, Yongsheng, Haiyan Wang, Xiaohong Shen, Bing Leng, and Shuangquan Li. 2018. "Efficient Convex Optimization for Energy-Based Acoustic Sensor Self-Localization and Source Localization in Sensor Networks" Sensors 18, no. 5: 1646. https://doi.org/10.3390/s18051646
APA StyleYan, Y., Wang, H., Shen, X., Leng, B., & Li, S. (2018). Efficient Convex Optimization for Energy-Based Acoustic Sensor Self-Localization and Source Localization in Sensor Networks. Sensors, 18(5), 1646. https://doi.org/10.3390/s18051646