1. Introduction
Monitoring of concrete structures is of utmost importance to cope with the ageing of infrastructure in many countries [
1]. A large variety of sensors and data processing methods is used to assess loads, structural health, load capacity, and remaining lifetime. As all available technologies have their limitations and most of them react to more than one influence factor, a monitoring system should be carefully designed, adapted to the specific structure and the loads affecting it, and consist of more than one sensing technology.
Ultrasonic transmission measurements have been used for decades to monitor concrete elements, mostly on a laboratory scale. Their main application is to estimate concrete strength from wave velocities as described e.g., in European standards [
2]. Ultrasonic transmission is also used in the assessment of freeze-thaw resistance of concrete samples [
3]. Recently, they were successfully applied in concrete fatigue experiments [
4]. Data evaluation is mostly performed as determination of time of flight and velocity. Unfortunately, the sensitivity of this technique is limited, as distances between transmitter and receiver are short (and so is transit time) and quite low frequencies (25–150 kHz) must be used due to the inherent scattering properties of concrete.
Recently, coda wave interferometry (CWI), a technique adapted from seismology, was introduced to civil engineering experiments [
5]. It is based on the comparison of the late part of waveforms (“coda”), containing multiple reflections and scattering events to reference data. As the travel paths and transit times are much longer and the waves may have traveled more than once through the region of interest, this technique can be used to reveal subtle changes in concrete laboratory samples and even large structural elements. Several variants of CWI exist and are discussed later in this paper. A review of the application of CWI on concrete is given in [
5]. As other techniques, CWI has its limitations—loss of directionality, lack of discrimination between wave types or limited ability to pinpoint the location of changes (structural ones as cracks or local alteration of material parameters) when using just one transmitter/receiver pair. In addition, CWI algorithms break down if changes in the material exceed a certain, often-unforeseeable limit. A way to overcome this issue is described in this paper.
CWI is not limited to single transmitter receiver configurations. When using networks of transducers, localization of changes is possible up to a certain extent. While most approaches are complex and computationally intensive [
6,
7], simplified techniques have been proposed [
8]. In this paper, we show a very simple alternative.
In our opinion, the two main advantages of using ultrasonic waves for monitoring are: first, the ability to detect changes at certain places in a structural element without having to place transducers exactly there. Distances up to five meters between transducers are possible, but closer placement leads to higher resolution. Second, ultrasonic waves are sensitive to many types of changes (which might be considered as a disadvantage at the same time), as stress, temperature, moisture and any kind of damage causes structural changes as cracks. In this study, we show an application to monitor stress distribution and cracking in concrete beams loaded until failure. Some preliminary results of this study have already been published in [
9].
2. Coda Wave Interferometry
2.1. Principle
Coda Wave Interferometry has been shown to be very sensitive in several studies [
10]. CWI was applied to monitor water saturation in sandstone [
11], thermally induced velocity change [
11,
12], and stress changes in a real concrete bridge in a practical environment [
13]. It was also used to detect and locate cracks in concrete [
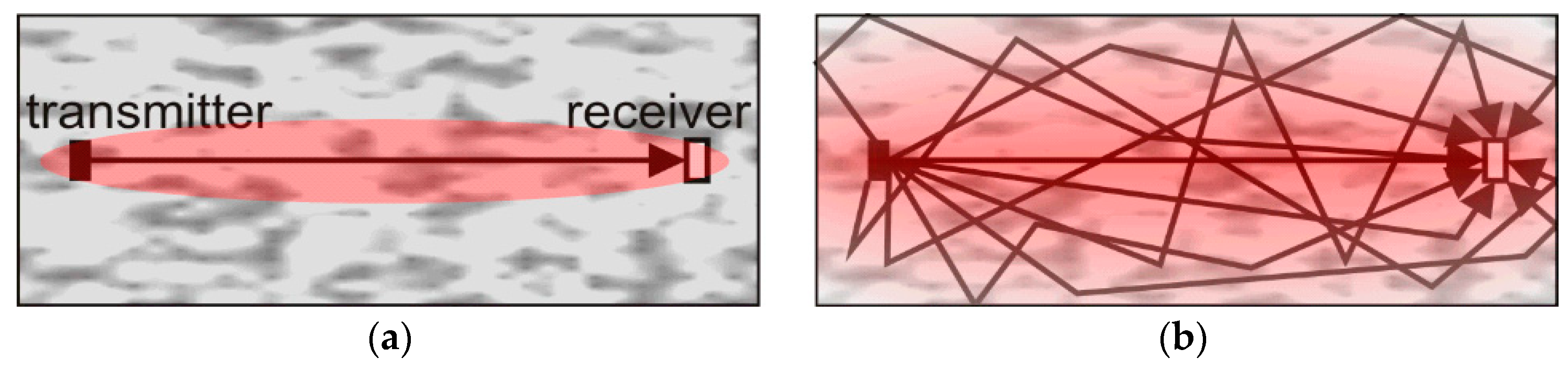
6]. As multiply scattered waves travel much longer than direct or single reflected ones (
Figure 1), they are much more sensitive to weak perturbations of the medium.
The unperturbed wave field
can be written as a sum of the waves that propagate along the multiple scattering trajectories
in the medium, where
t denotes time and
is the wave that has propagated along trajectory
when the medium changes over time, the dominant effect is a change
in the arrival times of the waves that propagate along each trajectory
T, so that the perturbed wave field
is given by:
By comparing the coda obtained from a fixed source and receiver pair in two different states, it is possible to monitor weak velocity variations in the medium as well as some other parameter changes. The most common way to quantify these changes are correlation coefficient (CC) and velocity change. The cross correlation is the basis of the CWI. It can be made in both frequency and time domain [
14]. It is used to compute the degree of similarity of two signals:
An example of experimental signals presented in
Figure 2 shows the sensitivity of coda wave following a velocity change. The blue curve represents the unperturbed wave field
, which is chosen as the reference signal, and the red curve represents the perturbed wave field
.
Other ways to describe changes in a medium by consecutive ultrasonic measurements are, for example, tracking changes in the amplitude or calculating parameters as magnitude-squared coherence [
15].
2.2. Preprocessing
Depending on the hardware set-up (see
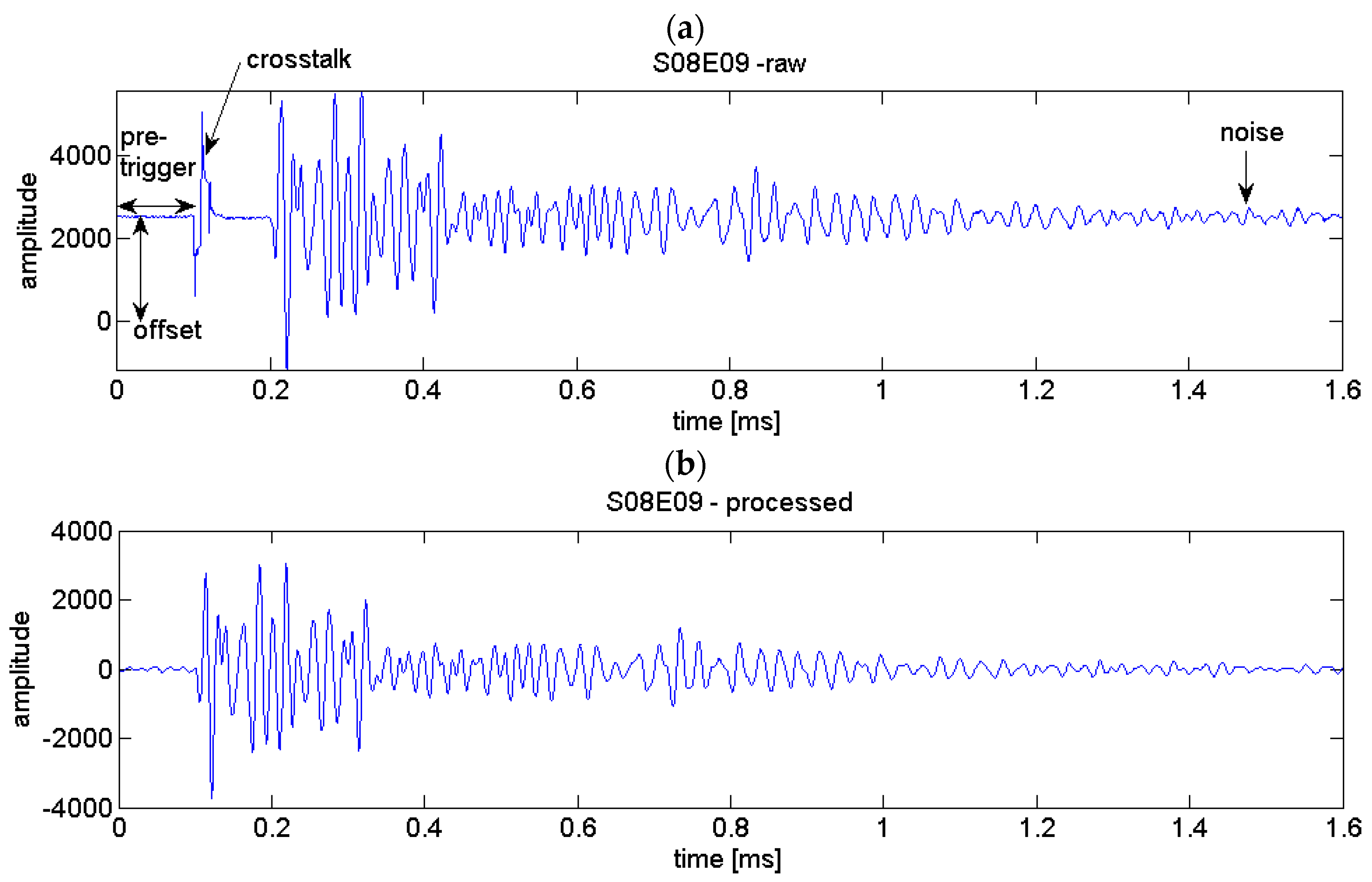
Section 3.1), data acquisition parameters and the signal-to-noise ratio preprocessing of each ultrasonic time series might be required. In our case, we recorded 100 samples before signal transmission (“pretrigger”) to determine DC offsets and noise level. This part of the signal is deleted before CWI evaluation. In addition, the following steps were carried out:
- -
Offset compensation
- -
Crosstalk removal (replacing the first samples by zeros)
- -
Bandpass filtering (passband 10–150 kHz)
Figure 3 shows an example of an ultrasonic time series, before and after data processing.
2.3. CWI Algorithms to Determine Velocity Change
2.3.1. Doublet Technique
The doublet technique was the first approach for velocity change determination and was widely used in geophysics [
16]. The principle is to determine the velocity change by evaluating the shift of acoustic field
at time
:
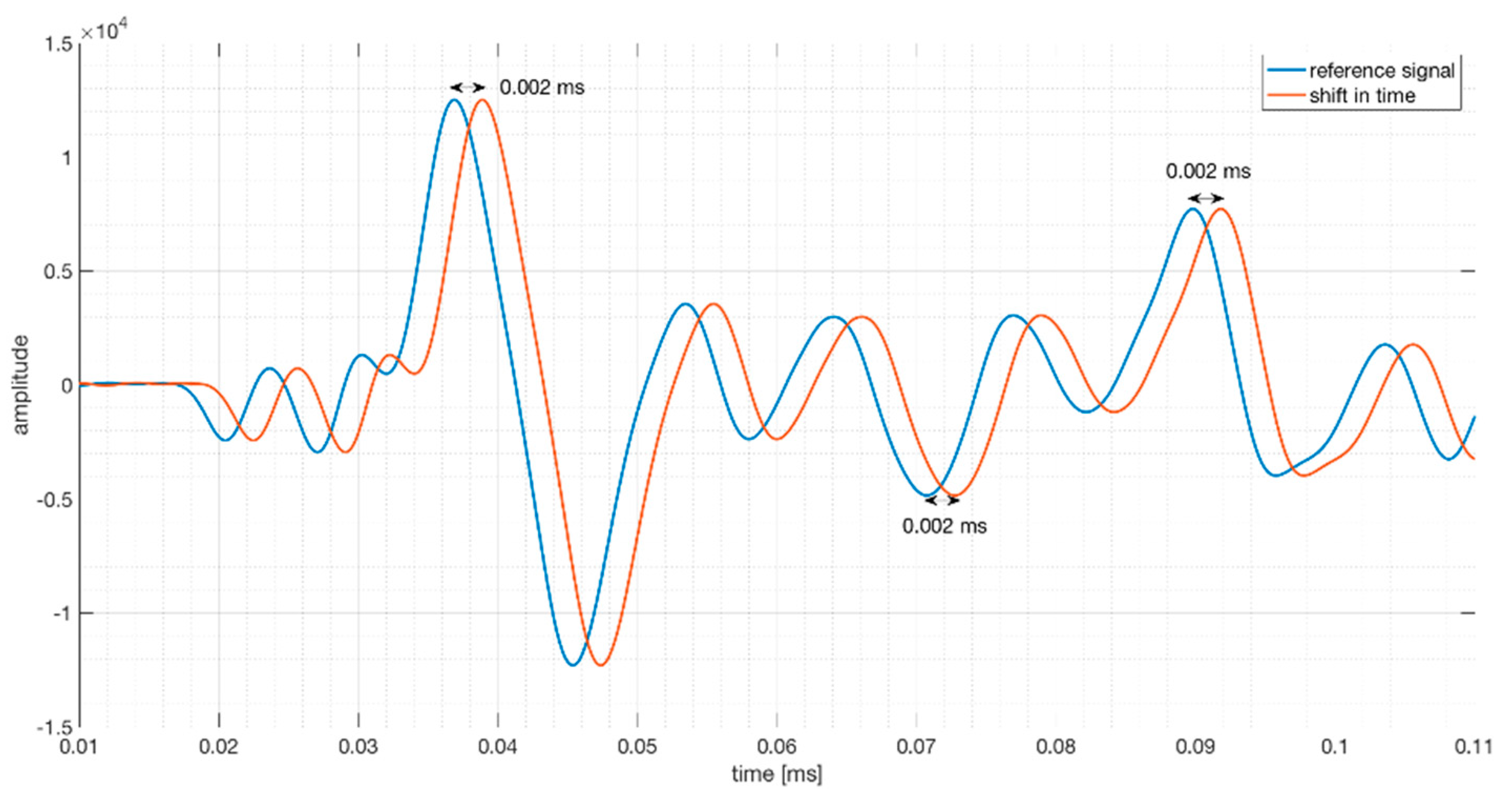
The doublet method assumes that the shift in time is (almost) constant in a certain time window. (
Figure 4).
The cross correlation is now a function of the shift
(Equation (3)). The value of
, which maximizes the
, is the shift between the two signals corresponding to center time t of a chosen time window.
is the average of all the
associated with each moment in this chosen time window [
16].
2.3.2. Stretching Method
The stretching method [
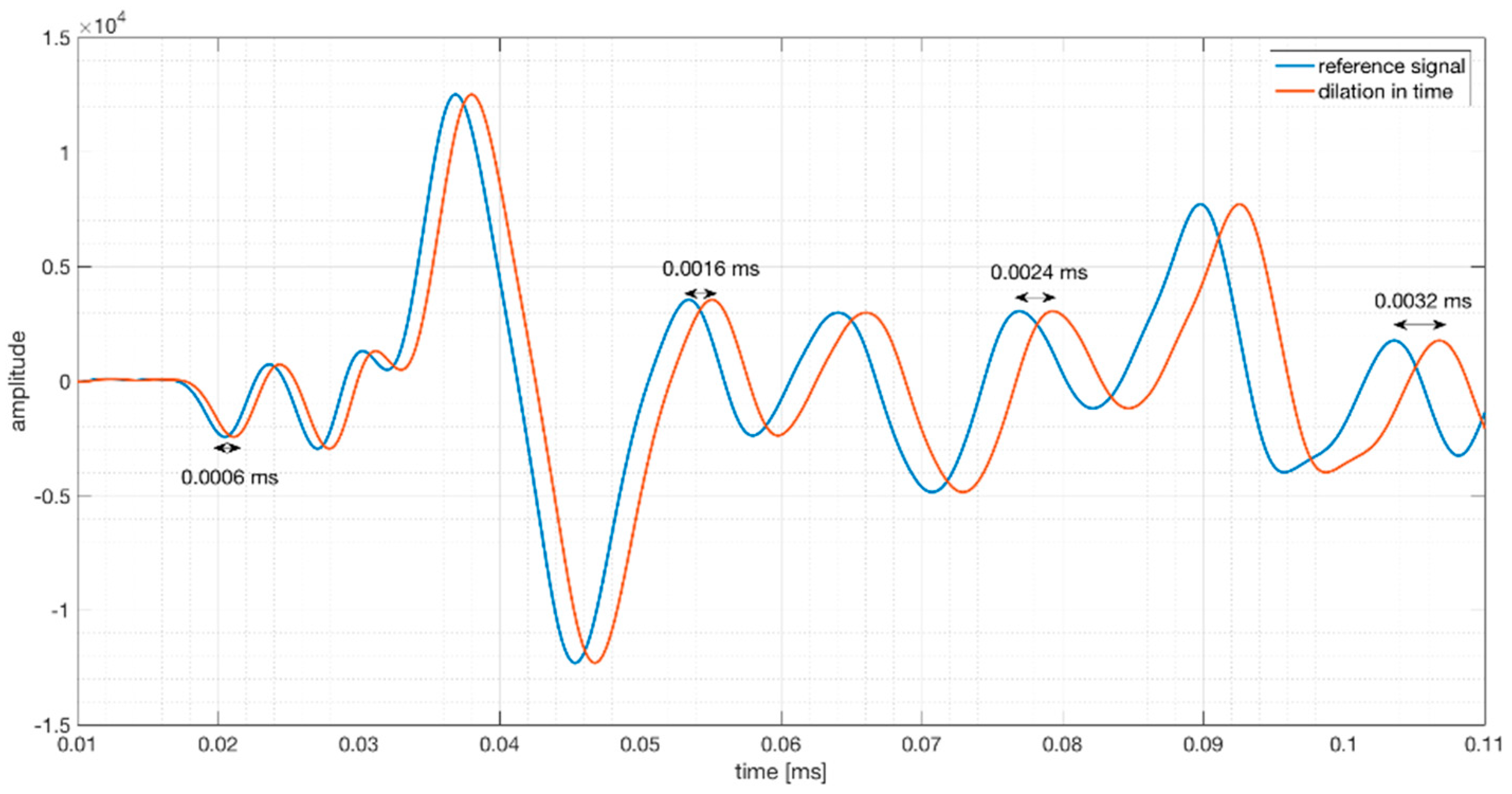
17] considers that the result of the velocity change is a dilation in time (
Figure 5). The compression or dilation of the reference signal with a dilation rate α simulates an increase or decrease of propagation velocity. Firstly, a reference signal is chosen and is stretched with different dilation rates. Then, the cross correlation between the new signal and all the stretched signals are calculated. Velocity change dv/v is determined by choosing α, which maximizes the cross correlation.
The cross-correlation coefficient (CWI-CC) at this point indicates whether the velocity change is linear and homogeneous (CWI-CC = 1) or local or nonlinear changes have taken place in the medium (CWI-CC < 1). The stretching method was used to evaluate the experiments in this study.
2.3.3. Taylor Series Expansion Method
The Taylor series expansion method [
18] is another method to determine the stretch factor. Equation (5) is expanded as a first order Taylor series:
when the high order
is ignored,
can be calculated by:
This method has higher computational efficiency because the stretch factor can be directly obtained from the signals without calculating cross-correlation coefficients. However, the precision and accuracy are limited because the high order terms in the calculation equations are ignored.
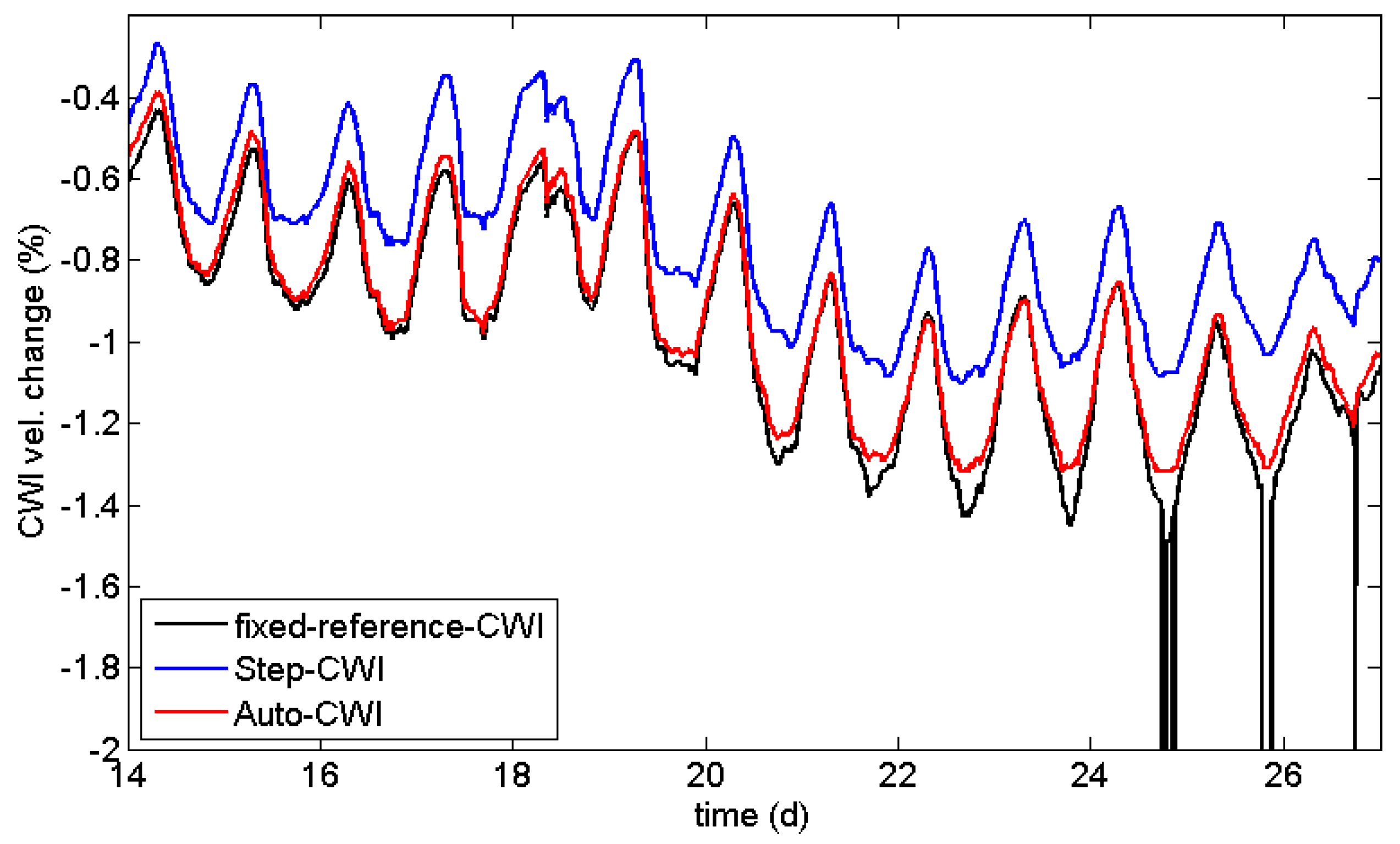
2.4. Step-Wise CWI Procedures
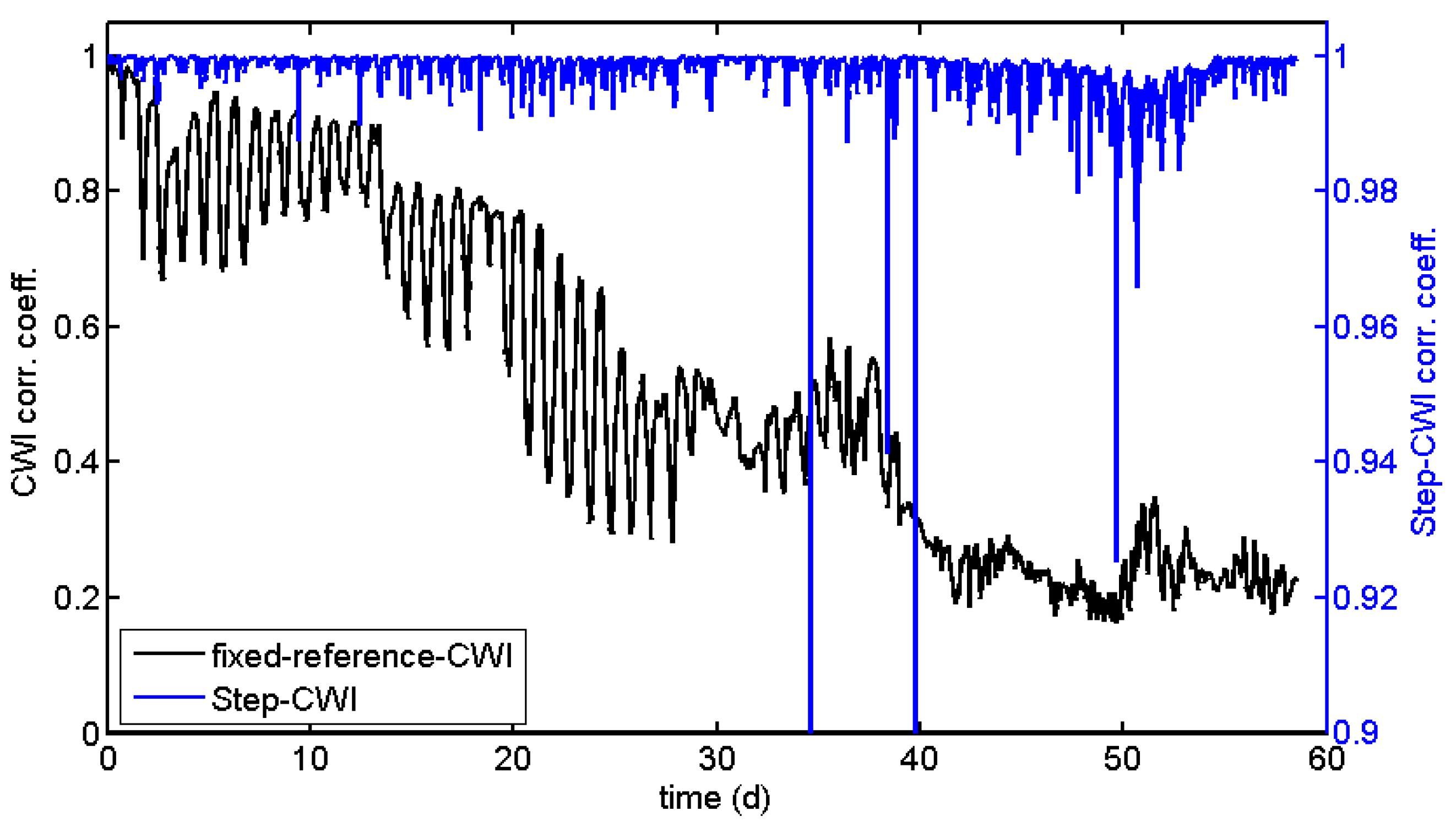
As a standard procedure, CWI properties are calculated using one or more fixed reference traces, usually recorded at the beginning of the actual experiment. This works well, if changes in the material do not exceed a certain, hardly predictable limit. If this limit is exceeded (i.e., the evaluated parts of the waveform are shifted by more than half a wavelength or the waveforms are completely changed by structural damage), the velocity changes are not meaningful anymore, while the correlation coefficients might still be useful. This is shown in
Figure 6 and
Figure 7 (black line) using data recorded in an experiment on a reinforced concrete sample subjected to accelerated corrosion (not related to the load test described later). The experiment suffered from high daily temperature changes in a laboratory. After about 25 days, the procedure starts to fail for a few data points. After 38 days, it breaks down, well before the actual failure (cracking) of the sample. At this point in time, the waveform is too different to the reference, resulting in low values of the CWI cross-correlation coefficient (
Figure 8).
One way to overcome this issue is to calculate stepwise changes by using just the previous measurement as reference (Step-CWI). Even experiments with large changes can be monitored by CWI. The stepwise velocity changes can be multiplied in an appropriate way to provide information on the cumulative change, relative to the beginning of experiment (blue line in
Figure 6). These values should match the velocity changes of the standard CWI procedure, but might be affected by rounding errors (
Figure 7). However, the cross-correlation coefficients cannot be cumulated, as this procedure is non-unique. Nevertheless, values deviating significantly from 1 are indications for sudden changes in the material (
Figure 8). These sudden changes correspond to anomalies in the curve for the fixed reference procedure. However, long-term trends are not visible in CWI cross-correlation coefficients for Step-CWI.
In this study, the step-wise version of coda wave interferometry was used for data evaluation.
To minimize the effect of rounding errors on CWI velocity changes, one could change the reference in larger, fixed intervals. We propose the use of an automated, data-driven procedure by selecting the new reference if the CWI cross-correlation coefficient exceeds a certain threshold (Auto-CWI, red lines in
Figure 6 and
Figure 7). This results in less frequent switches to a new reference when the velocity change is small (reducing rounding errors, see
Figure 7) and timely reference switches when changes are large. The difference in velocity change is quite significant at the end of the experiment shown in
Figure 6. For quantitative analysis of velocity changes, the Auto-CWI is recommended, while the step-CWI might be sufficient for qualitative analysis.
The CWI cross-correlation coefficients calculated by the Auto-CWI procedure are not quite useful for monitoring and thus not displayed in
Figure 8. One could use cross-correlation of the original waveforms (stepwise or with a fixed reference) instead.
All procedures work independently of the CWI algorithm (
Section 2.3) implemented. Thresholds and other parameters should be adapted to the CWI algorithms and the experimental set-up.
3. Load Experiments on Concrete Beams
3.1. Load Test Set-Up
In the frame of a large-scale project organized and funded by the German road research institute (Bundesanstalt für Straßenwesen, BASt), several dual span posttensioned girders with varying cross-sections were subjected to load tests until failure. The purpose of these tests was to identify load capacity reserves, as current codes are based on the result of single span experiments. In addition, the detailed distribution of stress and strain as well as some details of the failure mechanism are not yet fully understood for certain geometries [
19]. This project is carried out as new codes for load capacity calculations of existing bridges, introduced in Germany recently.
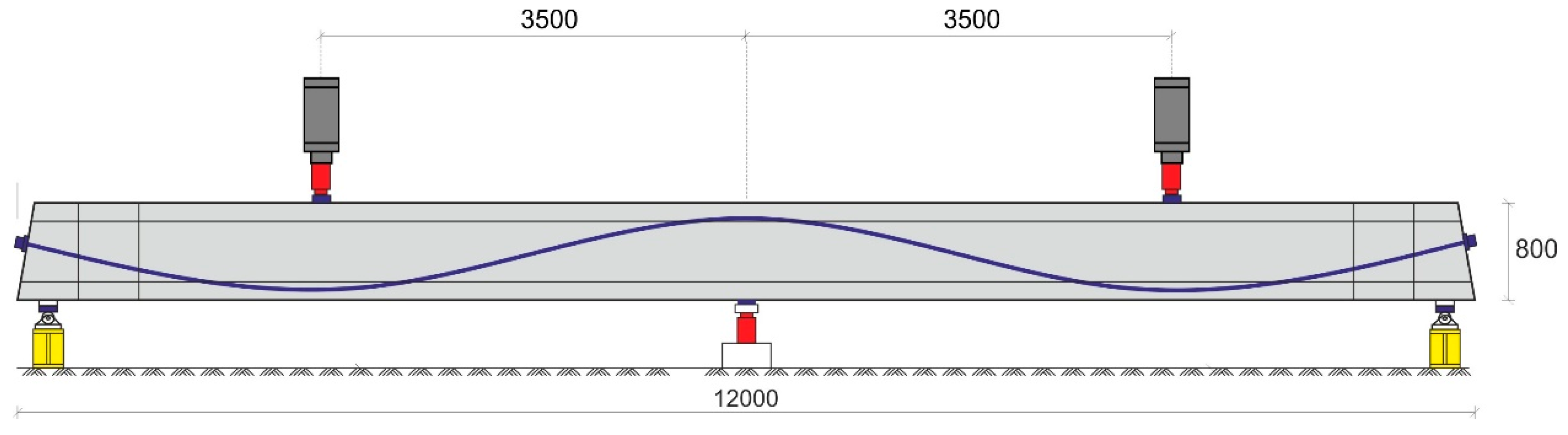
The girders are 12 m in length and 0.8 m in height. The cross-section was either rectangular (width 0.25 m) or H-shaped (as girder DLT 1.3 in
Figure 9). The right and left spans had a different load capacity by design (different stirrup diameter). The load tests were performed either by to point load slightly off-center on each span or by loads distributed along a line parallel to the girder. The experiments were monitored by load cells, strain gages, LVDTs, digital image correlation, and other techniques. Details are described in [
20].
3.2. Ultrasonic Set-Up
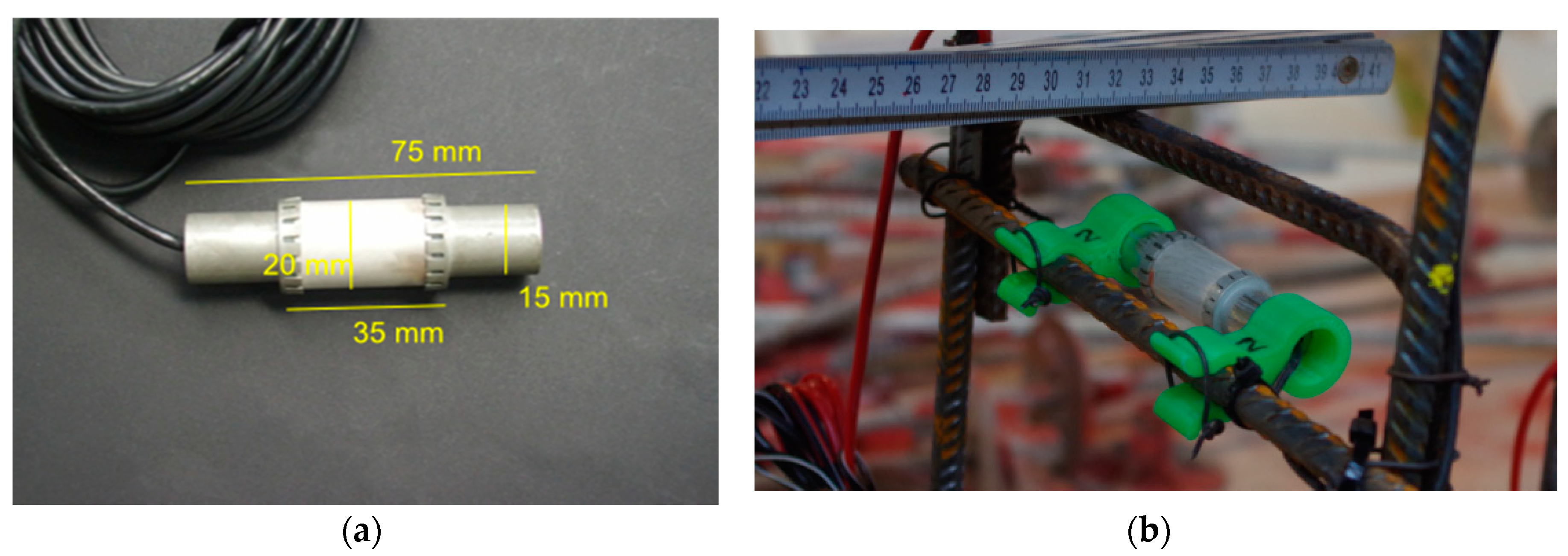
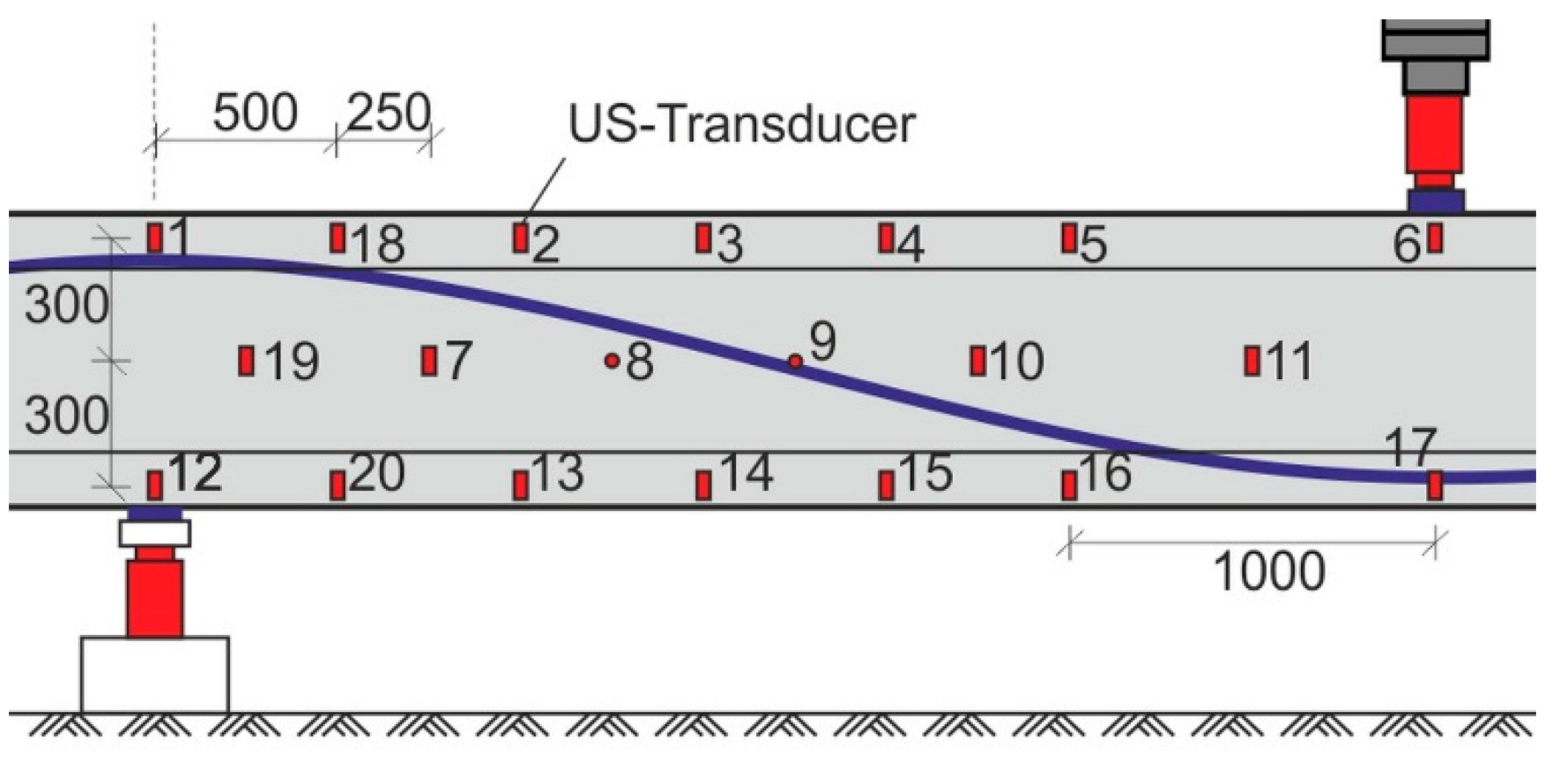
To evaluate the capability of ultrasonic monitoring to map the stress field and to identify cracked areas, the right (stronger) span of several girders was equipped with a network of embedded ultrasonic transducers ACS S0807 (
Figure 10 and
Figure 11). This type of transducer has been characterized and successfully applied in several experiments [
21]. Girder DLT 1.3, which was used in our main experiment, contained dense network of 20 transducers that worked as transmitters and receivers. The other girders featured a less-dense network (10 transducers distributed over the same area at most). The transducers cover less than 1% of the area in any cross-section. Rebar or tendon ducts are not affected. We do not expect a significant influence on load capacity in the experiments described here. The main measurement parameters are listed in
Table 1.
Data was acquired between all 48 pairs of nearest neighbors (vertical, horizontal and diagonal). All time series acquired have been processed using the scheme discussed in
Section 2.2 and evaluated for velocity change and correlation using the stepwise CWI stretching technique (
Section 2.3.2 and
Section 2.4).
4. Results
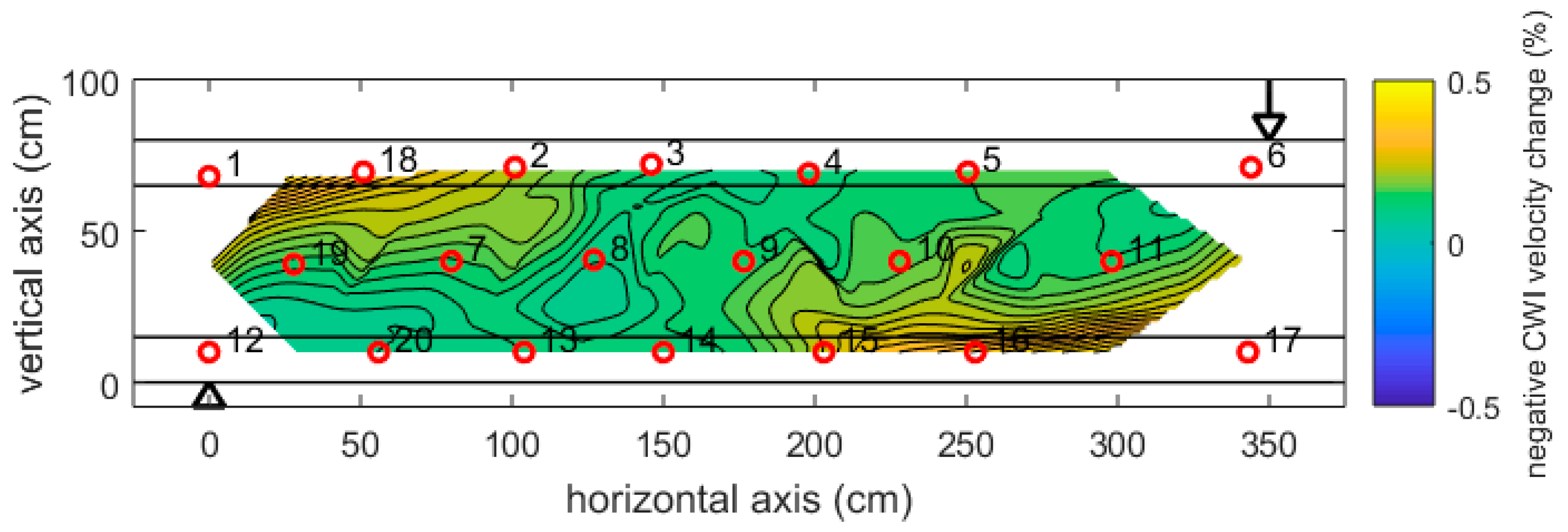
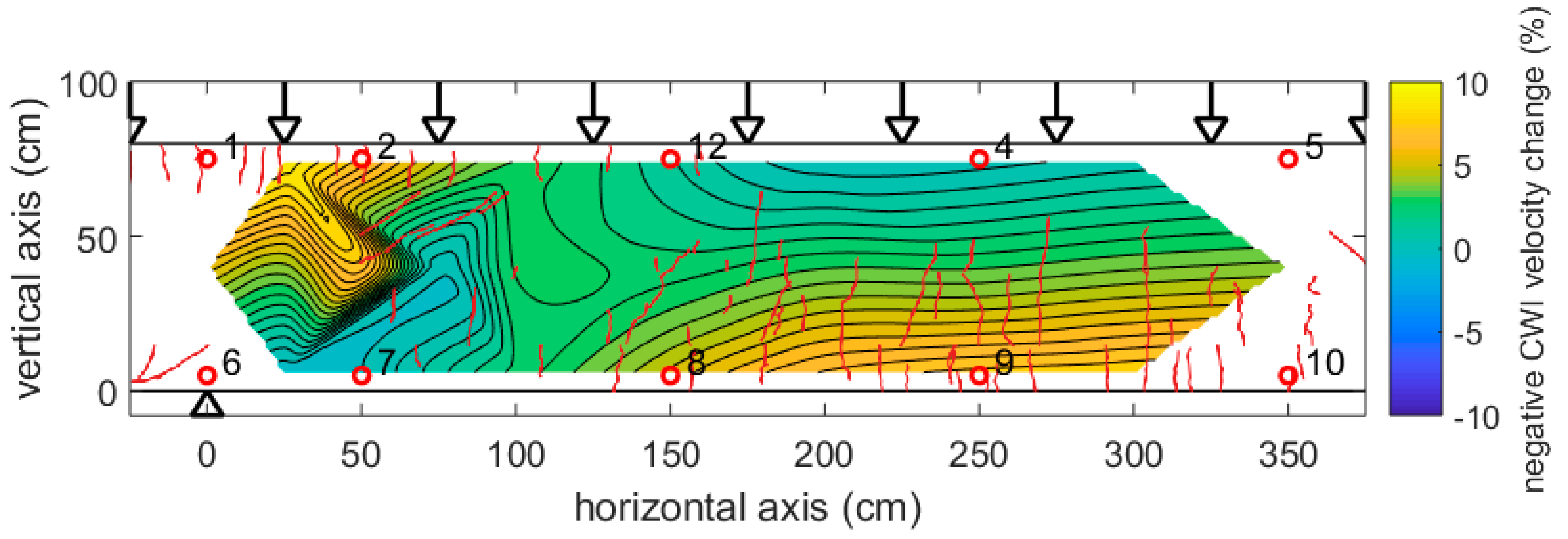
For each load step, the cumulative velocity changes compared to the beginning of the experiment (zero load) was determined for all 48 transducer pairs, allocated to the mid-point of the respective pair and interpolated over the area covered, resulting in a 2D distribution of velocity change. For the sake of consistency with previous reports and publications, we have used the negative velocity change as a parameter for the following figures.
Figure 12 shows the distribution of velocity change at a relatively small load of 250 kN (about 13% of the failure load). The highest changes (about −0.5%) are visible in the top left and bottom right, opposite to the loading point (arrow) and central support (triangle). These are the expected zones of tension in the girder. Note, that no cracks have been detected at this stage.
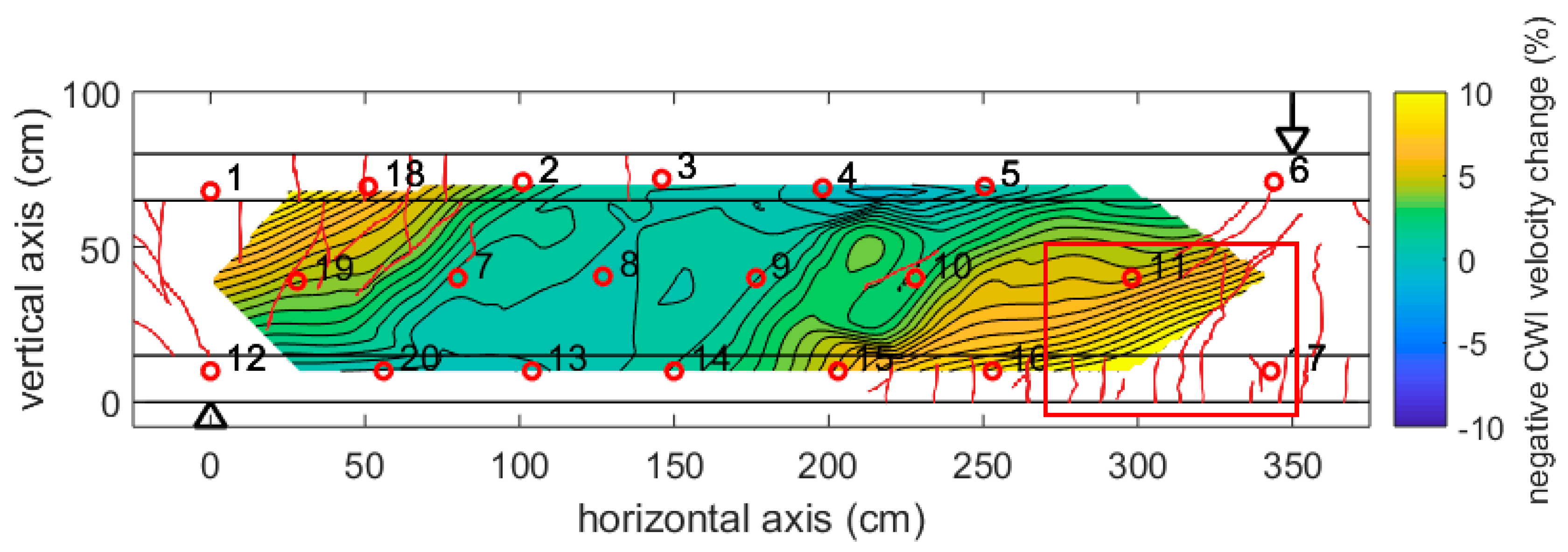
Figure 13 shows the results at 1250 kN load. Note that the color scale had to be extended by a factor of 20. Negative velocity changes up to −8% have been recorded. The figure contains information about visible crack patterns at this stage (red lines), except a rectangular area where the surface was covered by a layer of paint for digital image correlation (not discussed here). The shape of the crack patterns correlates with the shape of the negative velocity changes (indication of tension). For comparison,
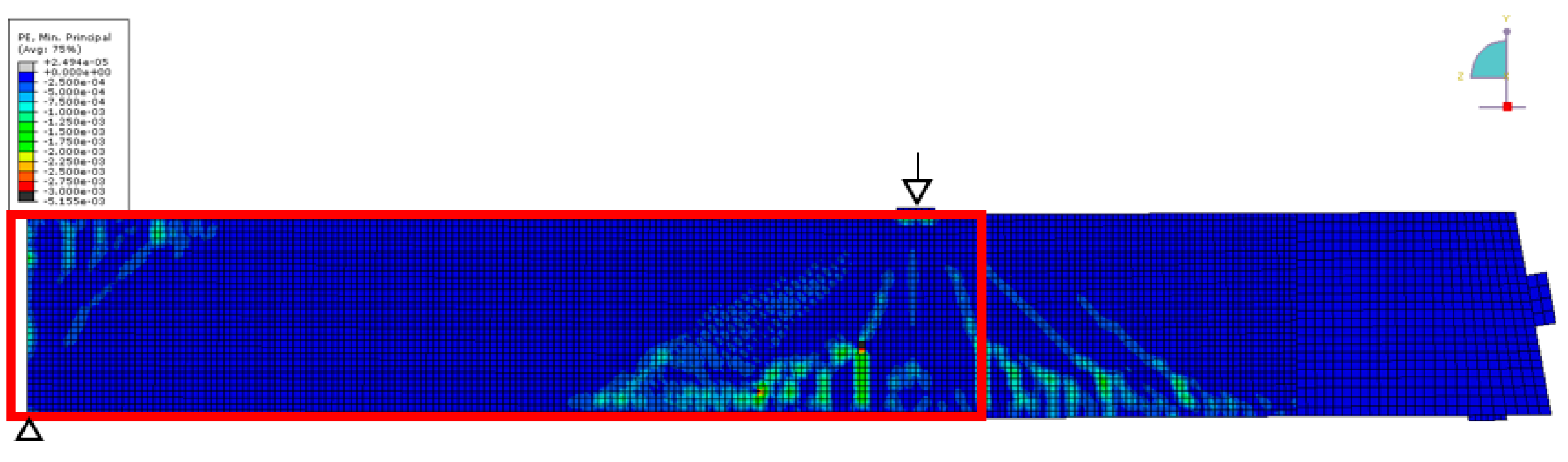
Figure 14 and
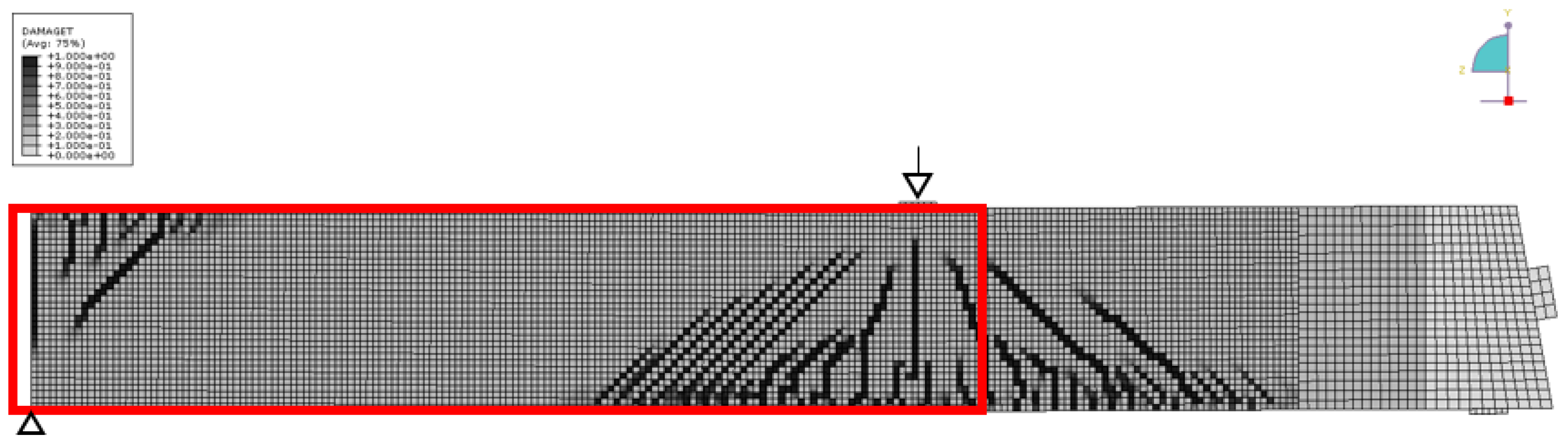
Figure 15 show the result of Finite Element (FE) simulation (ABAQUS). Note, that only one-half of the girder has been modeled for symmetry reasons. In
Figure 14, the main compressive strain is displayed, showing triangular zones with localized negative strain originating at the loading point and the central support.
Figure 15 (damage parameter, i.e., cracks) shows a similar distribution. The size and shape of the tensioned/damages zones closely matches the velocity changes in the experiment (
Figure 13), except a limited size anomaly between transducers 9 and 10. As a crack appears close to that location, this might reflect a feature in the girder or the experiment deviating from the idealized FE-model. This shows the sensitivity of the ultrasonic monitoring to subtle features in the stress distribution.
Figure 16 shows the results of a similar girder subjected to a different load regime. The point load was replaced by a large set of loads distributed along a line on the girder, reflecting the traffic loads on a bridge in a way that is more realistic. In this girder, we had used a much-sparser network of transducers.
As expected, the pattern of velocity changes is different to
Figure 12 and
Figure 13, reflecting on the different load regime and stress distribution. The right part of the girder shows an approximately horizontal distribution of velocity change. The highly negative values at the bottom are due to the tension in this part of the girder, resulting in vertical cracks. The left part is influenced by the central support, leading to tension (and again highly negative velocity change) at the center and top, as well as diagonal cracks in the same area. The anomalous velocity changes below transducers 1 and 2 (nose-like shape from top right to bottom left) are potentially due to hidden cracks, influencing the ultrasound propagation left-right and top-bottom in a different way (macroscopic anisotropy). Note, that the cracks might also change the coupling conditions of the transducers, resulting in additional changes in the waveforms.
5. Discussion
Our research shows that CWI is a very sensitive tool that detects subtle changes in concrete by ultrasonic monitoring. The range of application can be extended to cases with higher changes by using a step-wise procedure, which has also been successfully used in [
22]. The distribution of changes imaged by a very simple approach reflected the pattern expected by engineering experience and FE modeling. The largest changes have been in the zones of tension (high negative velocity change). A reduction of velocity in zones of tension is in accordance with previous research [
5,
7,
10,
13]. More sophisticated imaging approaches (as in [
6]) may reveal more details and may lead to possibilities of quantitative evaluation [
7,
23], but are currently limited to cuboid structures and are computationally expensive.
6. Conclusions and Outlook
Ultrasonic monitoring with embedded transducers, if evaluated appropriately, can contribute to the identification of stress patterns and cracking before visual signs appear on the surface in large-scale load experiments and potentially also at real structures. This also works with sparse transducer networks (about 1 m distance between transducers) and very simple imaging procedures.
For field applications, it would be desirable to develop imaging procedures, which are more quantitative than our approach, but less computationally expensive than the others. However, the main issue as in many monitoring technologies would be the separation of influence factors affecting ultrasonic wave propagations, as temperature, moisture and various damage mechanisms. When these issues are solved, implementation on selected real structures might help to make decisions in infrastructure asset management. Ultrasonic monitoring might help to identify zones with an elevated stress level or progressing damage, covering a significant volume with a limited number of sensors, The results might—in combination with other measures—trigger more detailed non-destructive and/or destructive investigations as well as decisions on rehabilitation, strengthening or load restrictions.
Author Contributions
E.N. wrote the main part of the paper, designed and performed most part of the data evaluation. X.W. assisted in mounting of the transducers mounting and ultrasonic data acquisition for the experiments. He wrote
Section 2.1 and
Section 2.3 and contributed to several other sections. M.H. and M.M. conceived, designed and performed the load experiments and contributed to the interpretation of the results presented in this paper.
Funding
The ultrasonic monitoring experiments by BAM at RWTH Aachen University have been funded by Bundesanstalt für Straßenwesen under the contract 89.0312/2015. Xin Wang is funded by the H2020-MSCA-ITN-2015 Framework Programme Project N°676139 “Infrastar” of the European Union.
Acknowledgments
The support of Anja Bertschat, Daniel Casares, Vivien Mierschke, Andreas Werner und Herbert Wiggenhauser of BAM as well as various members of the Team in the labs of IMB/RWTH is deeply acknowledged. The comments of two anonymous reviewers helped to improve the manuscript.
Conflicts of Interest
The authors declare no conflict of interest.
References
- Karbhari, V.M.; Ansari, M. (Eds.) Structural Health Monitoring of Civil Infrastructure Systems; Woodhead Publishing: Cambridge, UK, 2009; ISBN 978-1-84569-392-3. [Google Scholar]
- British Standards Institution (BSI). Testing Concrete in Structures. Determination of Ultrasonic Pulse Velocity; BS EN 12504-4:2004 (Equivalent German Version: DIN EN 12504-4:2004); British Standards Institution (BSI): London, UK, 2004. [Google Scholar]
- BAW Code of Practice: Frost Resistance Tests for Concrete (MFB). Bundesanstalt für Wasserbau. 2012. Available online: https://izw.baw.de/publikationen/merkblaetter/0/BAWCodeofPractice_Frost_Resistance_Concrete_MFB_2012.pdf (accessed on 4 April 2018).
- Thiele, M. Experimentelle Untersuchung und Analyse der Schädigungsevolution in Beton unter Hochzyklischen Ermüdungsbeanspruchungen (Experimental Investigation of Fatigue Process in Concrete under High-Cycle Loading). Ph.D. Thesis, Bundesanstalt fuer Materialforschung und -pruefung, Berlin, Germany, 2016. [Google Scholar]
- Planès, T.; Larose, E. A Review of Ultrasonic Coda Wave Interferometry in Concrete. Cem. Concr. Res. 2013, 53, 248–255. [Google Scholar] [CrossRef]
- Planes, T.; Rosseto, V.; Larose, E.; Margerin, L. Locating a small change in a multiple scattering environment (LOCADIF): Application to monitoring concrete. J. Acoust. Soc. Am. 2010, 128, 2375. [Google Scholar] [CrossRef]
- Zhang, Y.; Planès, T.; Larose, E.; Obermann, A.; Rospars, C.; Moreau, G. Diffuse Ultrasound Monitoring of Stress and Damage Development on a 15-Ton Concrete Beam. J. Acoust. Soc. Am. 2016, 139, 1691–1701. [Google Scholar] [CrossRef] [PubMed]
- Fröjd, P.; Ulriksen, P. Continuous Wave Measurements in a Network of Transducers for Structural Health Monitoring of a Large Concrete Floor Slab. Struct. Health Monit. 2016, 15, 403–412. [Google Scholar] [CrossRef]
- Niederleithinger, E.; Herbrand, M.; Müller, M. Monitoring von Querkraftversuchen an Spannbetondurchlaufträgern mit Ultraschall und Codawelleninterferometrie (Monitoring of shear tests on prestressed concrete continuous beams using ultrasound and coda wave interferometry). Bauingenieur 2017, 11, 474–481. [Google Scholar]
- Larose, E.; Hall, S. Monitoring stress related velocity variation in concrete with a 2 × 10−5 relative resolution using diffuse ultrasound. J. Acoust. Soc. Am. 2009, 125, 1853–1856. [Google Scholar] [CrossRef] [PubMed]
- Grêt, A.; Snieder, R.; Scales, J. Time-lapse monitoring of rock properties with coda wave interferometry. J. Geophys. Res. Solid Earth 2006, 111. [Google Scholar] [CrossRef] [Green Version]
- Niederleithinger, E.; Wunderlich, C. Influence of small temperature variations on the ultrasonic velocity in concrete. In Proceedings of the QNDE 2012, Denver, CO, USA, 15–20 July 2012; pp. 390–397. [Google Scholar]
- Stähler, S.C.; Sens-Schönfelder, C.; Niederleithinger, E. Monitoring stress changes in a concrete bridge with coda wave interferometry. J. Acoust. Soc. Am. 2011, 129, 1945–1952. [Google Scholar] [CrossRef] [PubMed]
- Poupinet, G.; Ratdomopurbo, A.; Coutant, O. On the use of earthquake multiplets to study fractures and the temporal evolution of an active volcano. Ann. Geophys. 1996, 39. [Google Scholar] [CrossRef]
- Hafiz, A.; Schumacher, T. Characterizing the Effect of Applied Stress in Concrete by Magnitude-Squared Coherence of Ultrasonic Full-Waveforms. Struct. Health Monit. 2017. [Google Scholar] [CrossRef]
- Poupinet, G.; Ellsworth, W.L.; Frechet, J. Monitoring velocity variations in the crust using earthquake doublets: An application to the Calaveras Fault, California. J. Geophys. Res. Solid Earth 1984, 89, 5719–5731. [Google Scholar] [CrossRef] [Green Version]
- Sens-Schönfelder, C.; Wegler, U. Passive image interferometry and seasonal variations of seismic velocities at Merapi Volcano, Indonesia. Geophys. Res. Lett. 2006, 33. [Google Scholar] [CrossRef] [Green Version]
- Liu, S.; Zhu, J.; Wu, Z. Implementation of Coda Wave Interferometry Using Taylor Series Expansion. J. Nondestruct. Eval. 2015, 34, 25. [Google Scholar] [CrossRef]
- Hegger, J.; Herbrand, M.; Maurer, M.; Zilch, K.; Rombach, G.A. Beurteilung der Querkraft und der Torsionstragfähigkeit von Brücken im Bestand—Erweiterte Bemessungsansätze; BASt Joint Research Project FE 15.0591/2012/FRB, Interim Report; RWTH University: Aachen, Germany, 2016. [Google Scholar]
- Herbrand, M.; Classen, M.; Adam, V. Querkraftversuche an Durchlaufträgern aus Spannbeton mit Rechteck- und I-Querschnitt. Bauingenieur 2017, 92, 465–473. [Google Scholar]
- Niederleithinger, E.; Wolf, J.; Mielentz, F.; Wiggenhauser, H.; Pirskawetz, S. Embedded Ultrasonic Transducers for Active and Passive Concrete Monitoring. Sensors 2015, 15, 9756–9772. [Google Scholar] [CrossRef] [PubMed] [Green Version]
- Shokouhi, P.; Niederleithinger, E. Damage Characterization in Concrete using Diffuse Ultrasound. Rev. Prog. Quant. Nondestruct. Eval. 2012, 1430, 1477–1484. [Google Scholar]
- Larose, E.; Obermann, A.; Digulescu, A.; Planes, T.; Chaix, J.F.; Mazerolle, F.; Moreau, G. Locating and characterizing a crack in concrete with diffuse ultrasound: A four-point bending test. J. Acoust. Soc. Am. 2015, 138, 232–241. [Google Scholar] [CrossRef] [PubMed]
© 2018 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).



















{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}