UAVs, Hyperspectral Remote Sensing, and Machine Learning Revolutionizing Reef Monitoring


Abstract
1. Introduction
2. Materials and Methods
- Coral genus
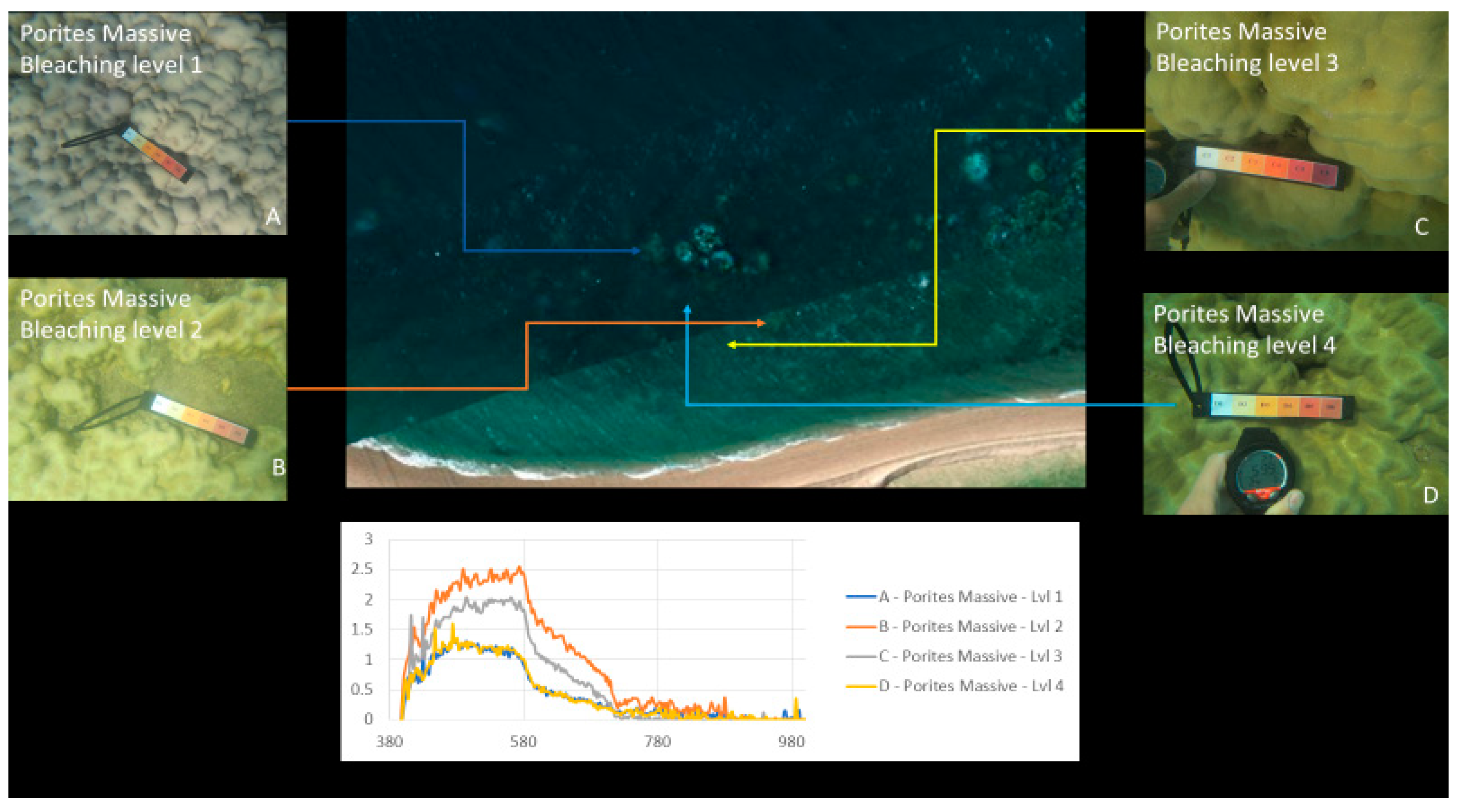
- Expert bleaching assessment (1 to 6 where 1 relates to severely bleached coral, 6—unbleached)
- Depth
- Notes about surroundings (e.g., coral size, proximity to other coral)
- Latitude
- Longitude
2.1. In-Water Surveys
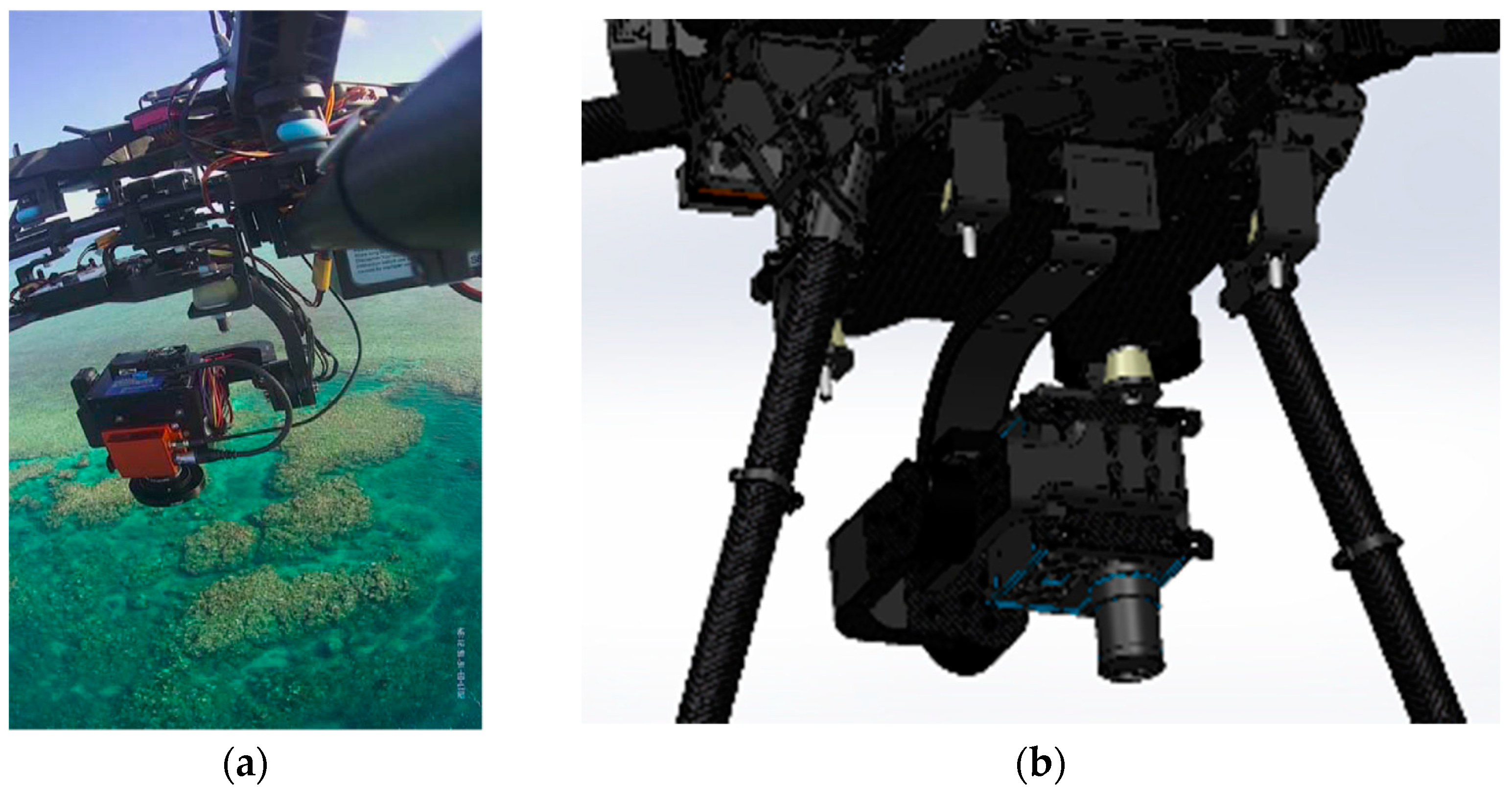
2.2. Airborne Methods, UAV, and Sensors
2.3. Orthorectification of Hyperspectral Images
2.4. Image Processing, Radiance, Reflectance, White Reference
2.5. Depth Correction
2.6. Coral Georeferencing
2.7. Spectral Signature Extraction
2.8. Reef Indices
2.9. Classification
3. Field Experiments
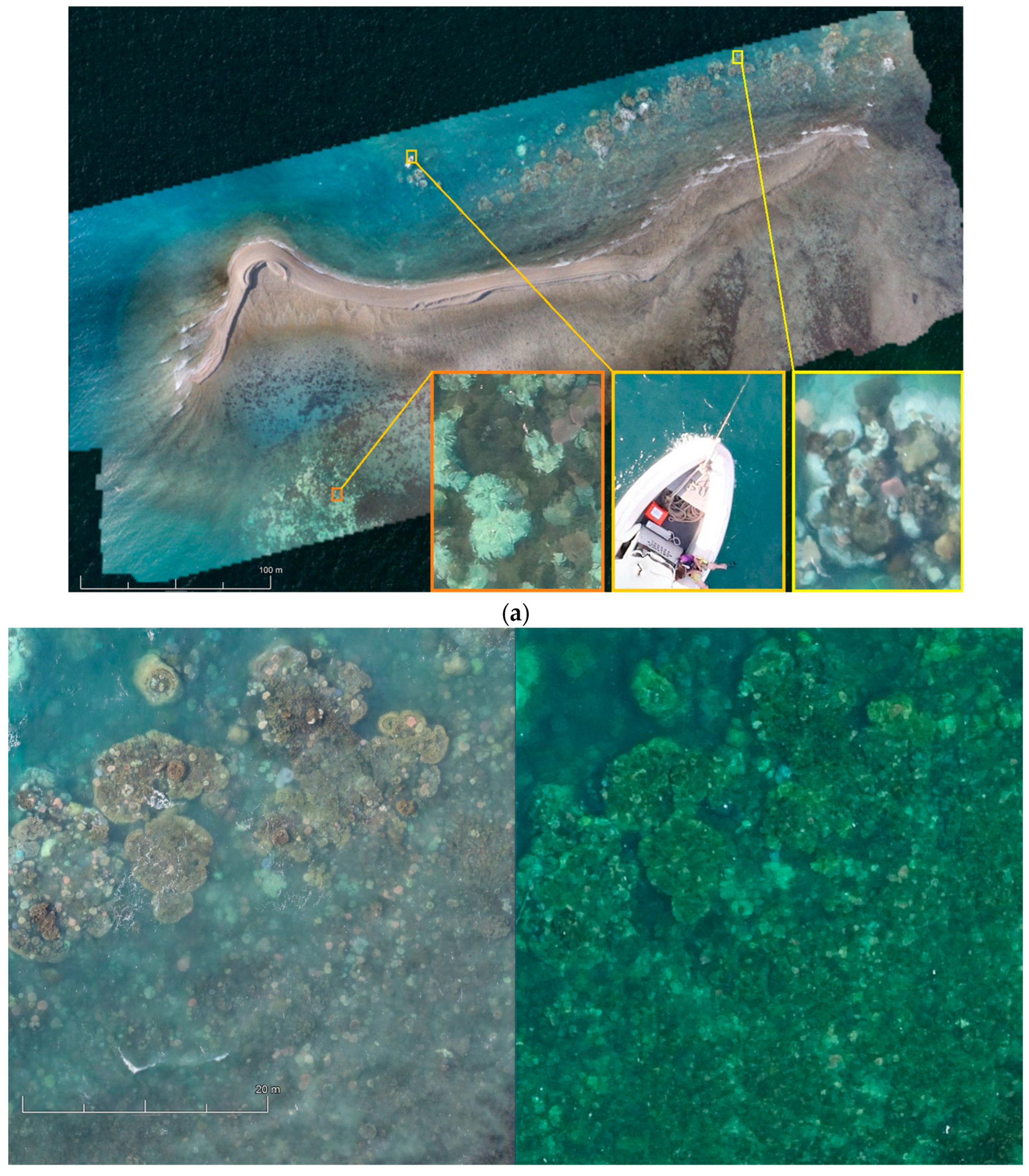
3.1. Site and In-Water Surveys
3.2. In-Water Data Collection Survey
4. Results
4.1. Water Depth and Water Depth Extraction Results
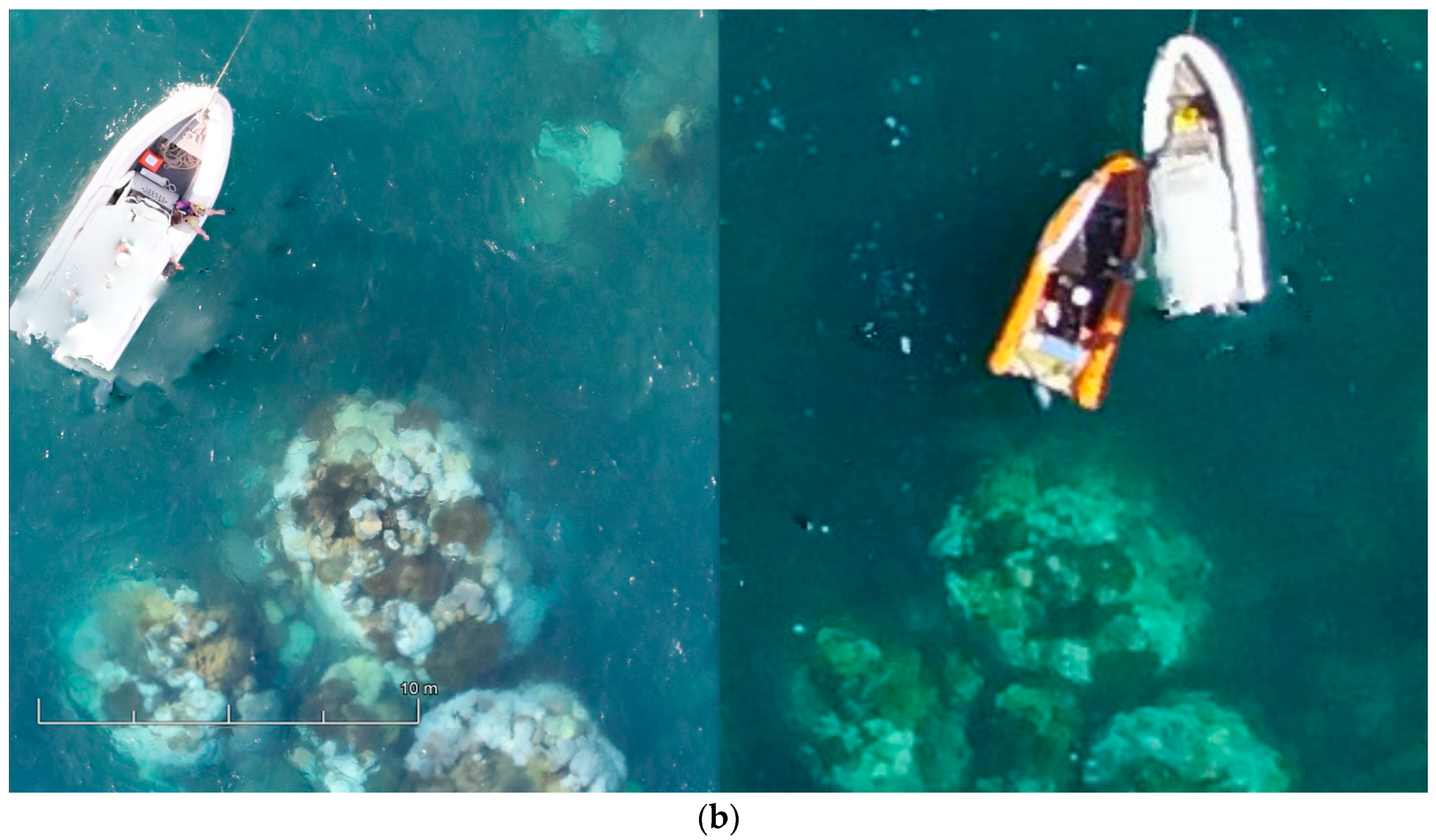
4.1.1. Orthomosaics
4.1.2. Photogrammetry Ocean Floor Digital Elevation Models
4.2. Spectral Signature Extraction Results
4.3. Classification Results
4.4. Index Results
4.5. Limitations
5. Conclusions
Author Contributions
Acknowledgments
Conflicts of Interest
References
- Hughes, T.; Kerry, J.; Baird, A.; Connolly, S.; Dietzel, A.; Eakin, M.; Heron, S.; Hoey, A.; Hoogenboom, M.; Liu, G.; et al. Global warming transforms coral reef assemblages. Nature 2018, 556, 492–496. [Google Scholar] [CrossRef] [PubMed]
- AIMS.gov Resources: Coral Bleaching Events. 2016. Available online: http://www.aims.gov.au/docs/research/climate-change/coral-bleaching/bleaching-events.html (accessed on 10 April 2018).
- Anderson, D.; Armstrong, R.; Weil, E. Hyperspectral Sensing of Disease Stress in the Caribbean Reef-Building Coral, Orbicella faveolata—Perspectives for the Field of Coral Disease Monitoring. PLoS ONE 2013, 8, e81478. [Google Scholar] [CrossRef] [PubMed]
- Goodman, J.A.; Purkis, S.J.; Phinn, S.R. Coral Reef Remote Sensing. A Guide for Mapping, Monitoring, and Management; Springer: Dordrecht, The Netherlands, 2013. [Google Scholar]
- Hamylton, S.; Hedley, J.; Beaman, R. Derivation of High-Resolution Bathymetry from Multispectral Satellite Imagery: A Comparison of Empirical and Optimisation Methods through Geographical Error Analysis. Remote Sens. 2015, 7, 16257–16273. [Google Scholar] [CrossRef]
- Gordon, H.R.; Brown, O.B. Influence of bottom albedo on the diffuse reflectance of a flat homogeneous ocean. Appl. Opt. 1974, 13, 2153–2159. [Google Scholar] [CrossRef] [PubMed]
- Mishra R, D.; Narumalani, S.; Rundquist, D.; Lawson, M.; Perk, R. Enhancing the detection and classification of coral reef and associated benthic habitats: A hyperspectral remote sensing approach. J. Geophys. Res. Oceans 2007, 112. [Google Scholar] [CrossRef]
- Zoffoli, M.; Frouin, R.; Kampel, M. Water Column Correction for Coral Reef Studies by Remote Sensing. Sensors 2004, 14, 16881–16931. [Google Scholar] [CrossRef] [PubMed]
- Zanaty, E. Support Vector Machines versus Multilayer Perception in data classification. Egypt. Inform. J. 2012, 13, 177–183. [Google Scholar] [CrossRef]
- Grasmuek, M.; Eberli, G.; Viggano, D.; Correa, T.; Rathwel, G.; Lou, J. Autonomous underwater vehicle (AUV) mapping reveals coral mound distribution, morphology, and oceanography in deep water of the Straits of Florida. Oceans 2006, 33. [Google Scholar] [CrossRef]
- Murfitt, S.; Allan, B.; Bellgrove, A.; Rattray, A.; Young, M.; Lerodiaconou, D. Applications of unmanned aerial vehicles in intertidal reef monitoring. Sci. Rep. 2017, 7, 10259. [Google Scholar] [CrossRef] [PubMed]
- Lesser, M.; Mobley, C. Bathymetry, water optical properties, and benthic classification of coral reefs using hyperspectral remote sensing imagery. Coral Reefs 2007, 26, 819–829. [Google Scholar] [CrossRef]

























{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Coral Index | Equation |
|---|---|
| Genus Classification | (R540 − R575/(R450 + R586) |
| Bleaching Classification | |
| Acropora | |
| Bleaching Level 1 (Alv1) | Alv1.1 = (R395 − R404)/(R395 + R404) Alv1.2 = (R575 − R604)/(R575 + R604) Alv1.3 = (R711 − R732)/(R711 + R732) |
| Bleaching Level 2 (Alv2) | Alv2.1 = (R404 − R489)/(R404 + R489) Alv2.2 = (R595 − R662)/(R595 + R662) |
| Bleaching Level 3 (Alv3) | Alv3.1 = (R446 − R473)/(R446 + R473) Alv3.2 = (R531 − R555)/(R531 + R555) Alv3.3 = (R586 − R622)/(R586 + R622) |
| Bleaching Level 4 (Alv4) | Alv4.1 = (R446 − R489)/(R446 + R489) Alv4.2 = (R569 − R600)/(R569 + R600) Alv4.3 = (R611 − R671)/(R611 + R671) |
| Bleaching Level 5 (Alv5) | Alv5.1 = (R484 − R522)/(R484 + R522) Alv5.2 = (R695 − R720)/(R695 + R720) |
| Bleaching Level 6 (Alv6) | Alv6.1 = (R400 − R418)/(R400 + R418) Alv6.2 = (R460 − R484)/(R460 + R484) Alv6.3 = (R724 − R768)/(R724 + R768) |
| Porites Massive | |
| Bleaching Level 1 (PLv1) | PLv1.1 = (R437 − R473)/(R437 + R473) PLv1.2 = (R680 − R737)/(R680 + R737) |
| Bleaching Level 2 (PLv2) | PLv2.1 = (R411 − R473)/(R411 + R473) PLv2.2 = (R640 − R671)/(R640 + R671) |
| Bleaching Level 3 (PLv3) | PLv3.1 = (R429 − R473)/(R429 + R473) PLv3.2 = (R576 − R640)/(R576 + R640) |
| Bleaching Level 4 (PLv4) | PLv4.1 = (R406 − R418)/(R406 + R418) PLv4.2 = (R533 − R582)/(R533 + R582) |
| Gonipora | |
| Bleaching Level 3 (GLv3) | GLv3.1 = (R409 − R477)/(R409 + R477) GLv3.2 = (R640 − R722)/(R640 + R722) |
| Turbinaria | |
| Bleaching Level 5 (TLv5) | TLv5.1 = (R415 − R442)/(R415 + R442) TLv5.2 = (R471 − R486)/(R471 + R486) TLv5.3 = (R500 − R544)/(R500 + R544) TLv5.4 = (R675 − R717)/(R675 + R717) |
| Soft Coral | |
| Bleaching Level 5 (SLv5) | SLv5.1 = (R429 − R444)/(R429 + R444) SLv5.2 = (R506 − R544)/(R506 + R544) SLv5.3 = (R577 − R604)/(R577 + R604) SLv5.4 = (R662 − R708)/(R662 + R708) |
| Photo ID | Coral Type | Lv Bleached | Bleached | Depth | Notes | Latitude | Longitude | Pixel x | Pixel y |
|---|---|---|---|---|---|---|---|---|---|
| 76 | Porites massive | 1 | Yes | 1.5> | 18.8129 | 146.4267 | 1489 | 1412 | |
| 77 | Porites massive | 1 | Yes | 18.8129 | 146.4267 | 1507 | 1421 | ||
| 78 | Porites massive | 4 | No | 2.3 | 18.8130 | 146.4268 | 1544 | 1567 | |
| 79 | Porites massive | 4 | No | 2.3 | 18.8130 | 146.4268 | 1529 | 1548 | |
| 80 | Porites massive | 4 | No | 2.3 | 18.8130 | 146.4268 | 1541 | 1551 | |
| 81 | Goniopora sp. | 3 | No | 1.7 | 18.8132 | 146.4268 | 1598 | 1733 | |
| 82 | Goniopora sp. | 3 | No | 1.7 | 18.8132 | 146.4268 | 1604 | 1729 | |
| 83 | Goniopora sp. | 3 | No | 1.7 | 18.8132 | 146.4268 | 1607 | 1727 | |
| 84 | Acropora sp. | 2 | Yes | Acropora plate. | 18.8131 | 146.4268 | 1604 | 1669 | |
| 85 | Acropora sp. | 2 | Yes | Acropora plate. | 18.8131 | 146.4268 | 1604 | 1666 | |
| 86 | Acropora sp. | 3 | No | 1.4 | Acropora plate. | 18.8131 | 146.4269 | 1659 | 1684 |
| 87 | Acropora sp. | 3 | No | 1.4 | 18.8131 | 146.4269 | 1658 | 1675 | |
| 88 | Porites massive | 3 | No | 1.5> | 18.8131 | 146.4268 | 1610 | 1666 | |
| 89 | Porites massive | 3 | No | 18.8131 | 146.4268 | 1615 | 1675 | ||
| 90 | Porites massive | 3 | No | 1.5> | 18.8131 | 146.4269 | 1633 | 1636 |
| Coral Type | Bleaching Level | Signature Accuracy (%) | Points Found | Accuracy (%) | Found Pixels | Area (%) | Overall Accuracy (%) |
|---|---|---|---|---|---|---|---|
| Porites massive | 1 | 79.17 | 2/3 | 66.667 | 91,157 | 2.932 | 66.67 |
| Porites massive | 2 | 94.44 | 1/2 | 50.00 | 30,007 | 0.965 | 50.00 |
| Porites massive | 3 | 68.75 | 2/7 | 28.571 | 55,529 | 1.786 | 28.57 |
| Porites massive | 4 | 100.00 | 4/5 | 80.00 | 339,305 | 10.915 | 0 (EA) |
| Acropora sp. | 1 | 100.00 | 7/13 | 53.846 | 173,810 | 5.591 | 53.85 |
| Acropora sp. | 2 | 46.67 | 2/4 | 50.00 | 1248 | 0.040 | 46.67 |
| Acropora sp. | 3 | 100.00 | 2/2 | 100.00 | 38,729 | 1.246 | 100.00 |
| Acropora sp. | 4 | 100.00 | 2/2 | 100.00 | 41,618 | 1.339 | 100.00 |
| Acropora sp. | 5 | 100.00 | 3/14 | 21.428 | 32,119 | 1.033 | 21.43 |
| Acropora sp. | 6 | 100.00 | 2/2 | 100.00 | 115,879 | 3.728 | 0 (EA) |
| Soft coral | 5 | 44.00 | 2/2 | 100.00 | 392,569 | 12.628 | 0 (EA) |
| Turbinaria sp. | 5 | 73.91 | 2/2 | 100.00 | 2763 | 0.089 | 73.91 |
| Coral Type | Bleaching Level | Signature Accuracy (%) | Points Found | Accuracy (%) | Found Pixels | Area (%) | Overall Accuracy (%) |
|---|---|---|---|---|---|---|---|
| Porites massive | 1 | 88.79 | 2/2 | 100.00 | 238,998 | 6.636 | 88.79 |
| Porites massive | 2 | 89.32 | 2/2 | 100.00 | 57,323 | 1.592 | 89.32 |
| Porites massive | 3 | 96.32 | 1/1 | 100.00 | 221,203 | 6.142 | 96.32 |
| Porites massive | 4 | 88.13 | 3/3 | 100.00 | 45,386 | 1.260 | 88.13 |
| Acropora sp. | 1 | 96.54 | 4/4 | 100.00 | 1,130,663 | 31.396 | 0 (EA) |
| Acropora sp. | 4 | 93.54 | 2/2 | 100.00 | 55,085 | 1.530 | 93.54 |
| Acropora sp. | 5 | 90.75 | 3/3 | 100.00 | 477,663 | 13.264 | 0 (EA) |
| Acropora sp. | 6 | 90.27 | 2/2 | 100.00 | 214,046 | 5.944 | 90.27 |
© 2018 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Parsons, M.; Bratanov, D.; Gaston, K.J.; Gonzalez, F. UAVs, Hyperspectral Remote Sensing, and Machine Learning Revolutionizing Reef Monitoring. Sensors 2018, 18, 2026. https://doi.org/10.3390/s18072026
Parsons M, Bratanov D, Gaston KJ, Gonzalez F. UAVs, Hyperspectral Remote Sensing, and Machine Learning Revolutionizing Reef Monitoring. Sensors. 2018; 18(7):2026. https://doi.org/10.3390/s18072026
Chicago/Turabian StyleParsons, Mark, Dmitry Bratanov, Kevin J. Gaston, and Felipe Gonzalez. 2018. "UAVs, Hyperspectral Remote Sensing, and Machine Learning Revolutionizing Reef Monitoring" Sensors 18, no. 7: 2026. https://doi.org/10.3390/s18072026
APA StyleParsons, M., Bratanov, D., Gaston, K. J., & Gonzalez, F. (2018). UAVs, Hyperspectral Remote Sensing, and Machine Learning Revolutionizing Reef Monitoring. Sensors, 18(7), 2026. https://doi.org/10.3390/s18072026