Smart Sensing of Pavement Temperature Based on Low-Cost Sensors and V2I Communications



Abstract
:1. Introduction
2. Modelling Pavement Temperature
Multilayer Perceptron
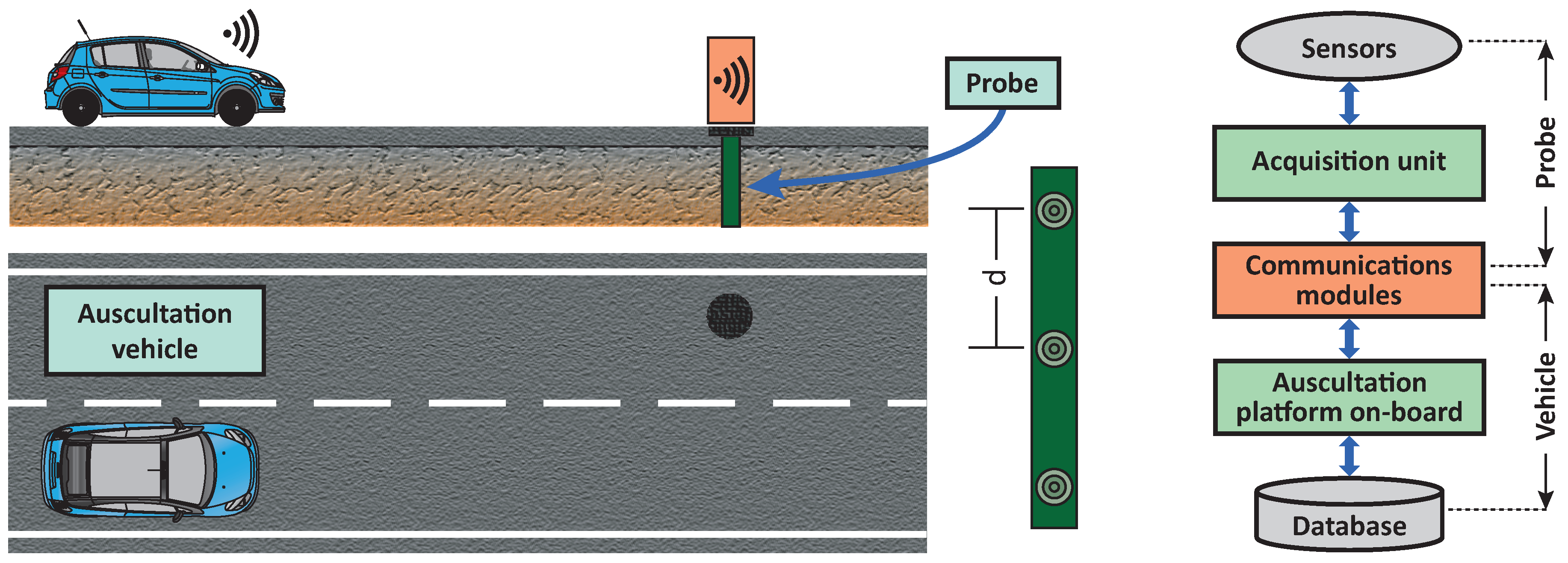
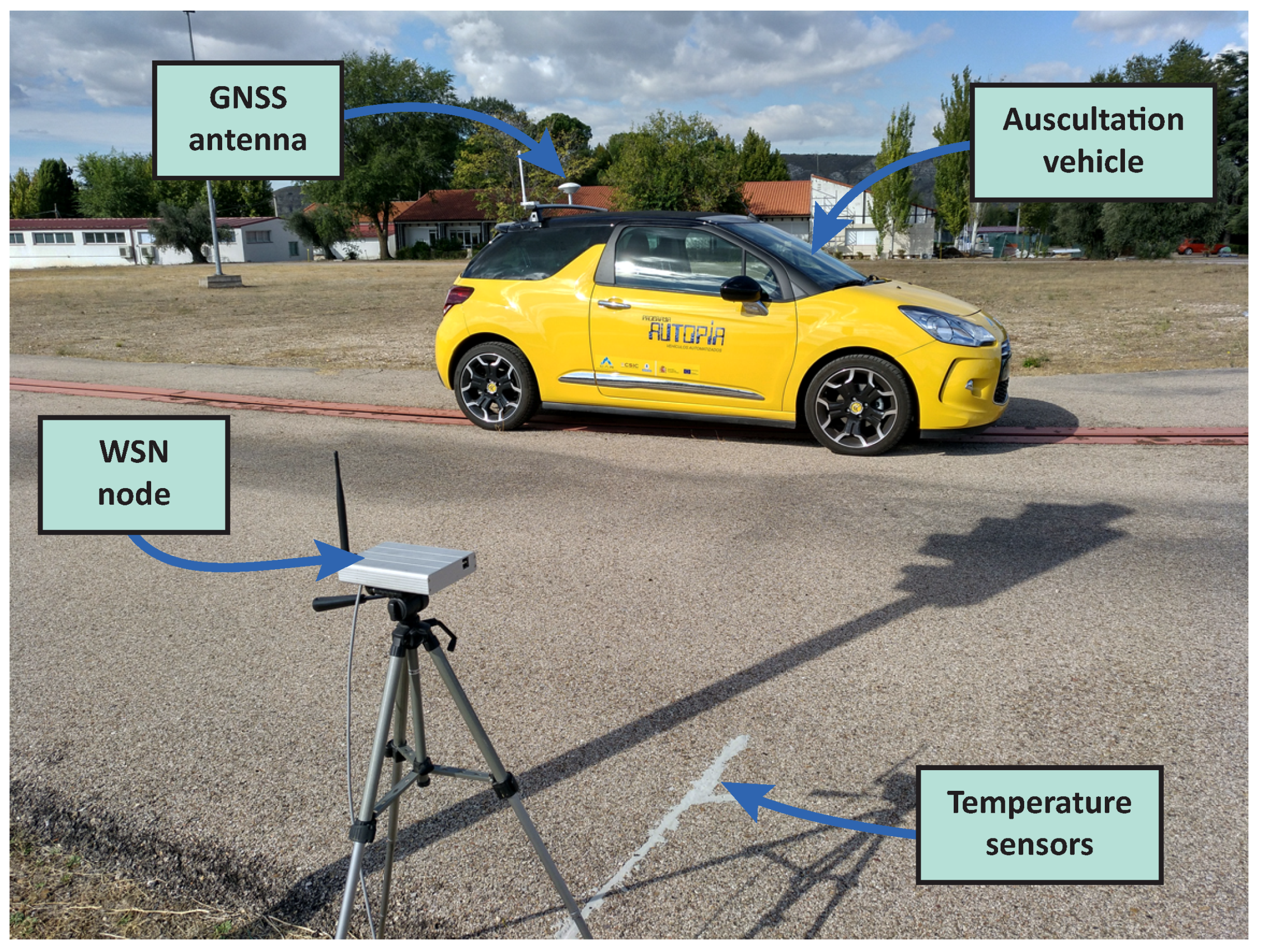
3. System Overview
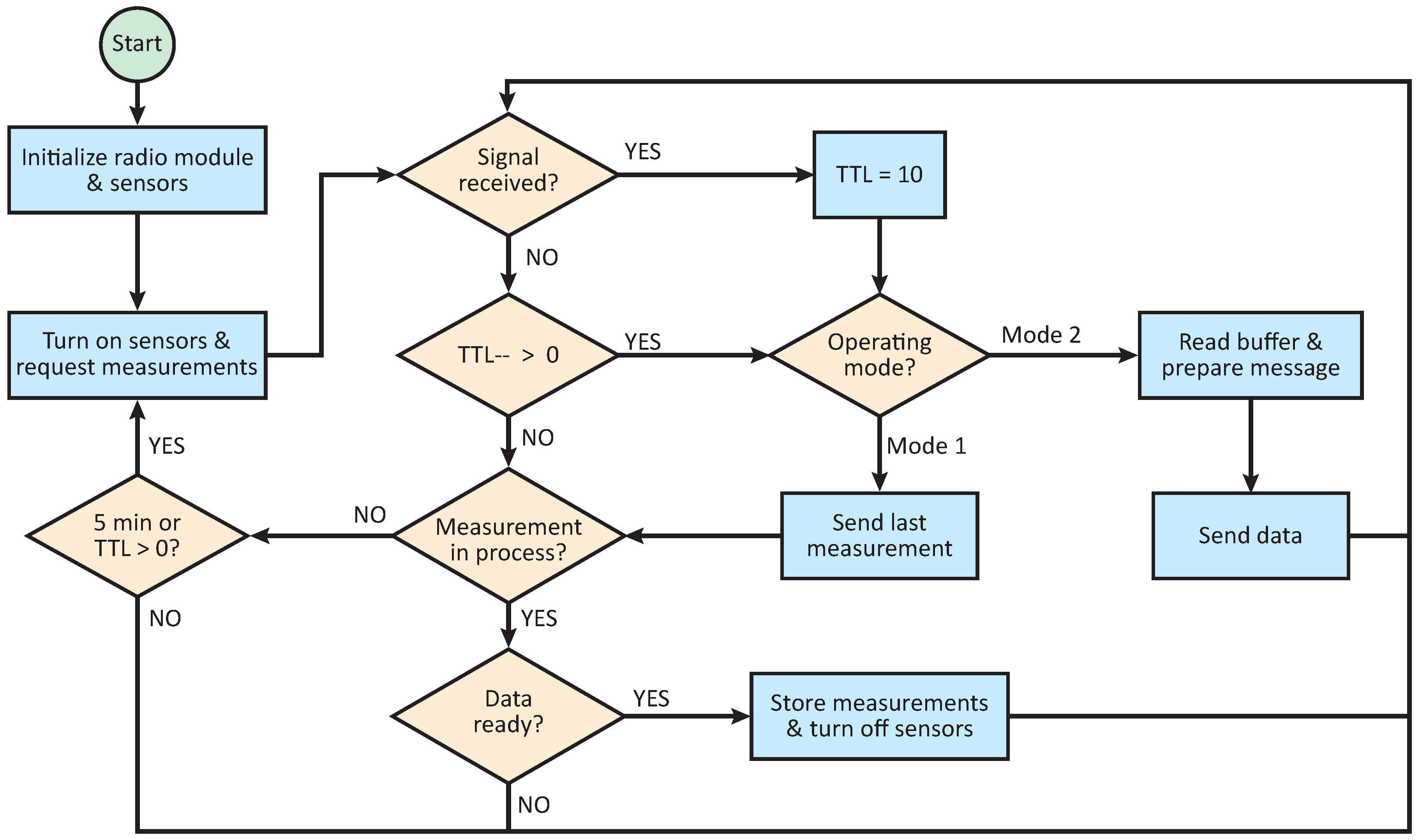
3.1. Probes
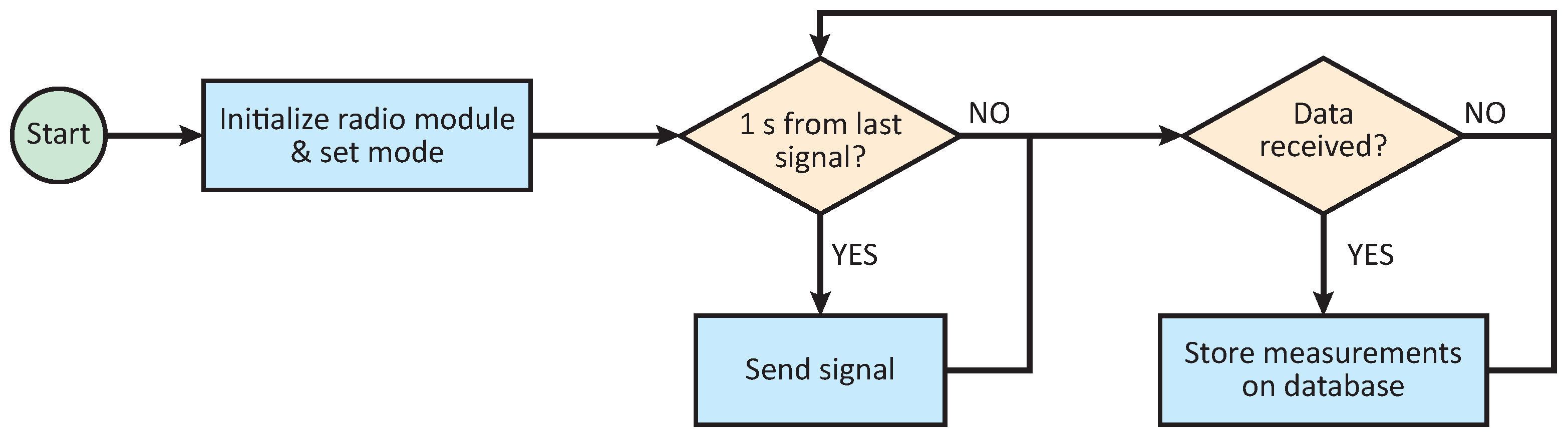
3.2. Auscultation Platform
4. System Validation
4.1. Mode 1: Instant Measurement Validation
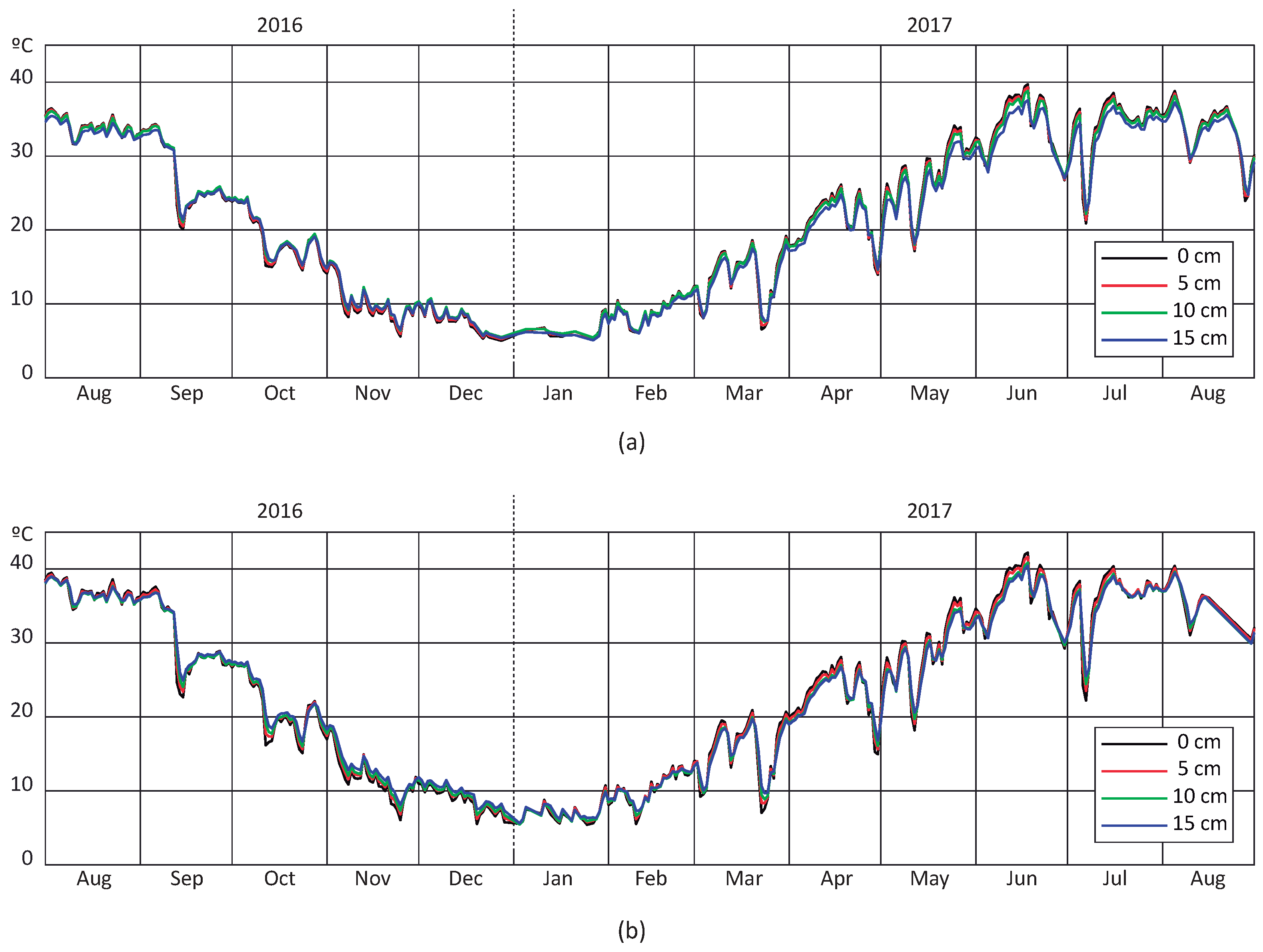
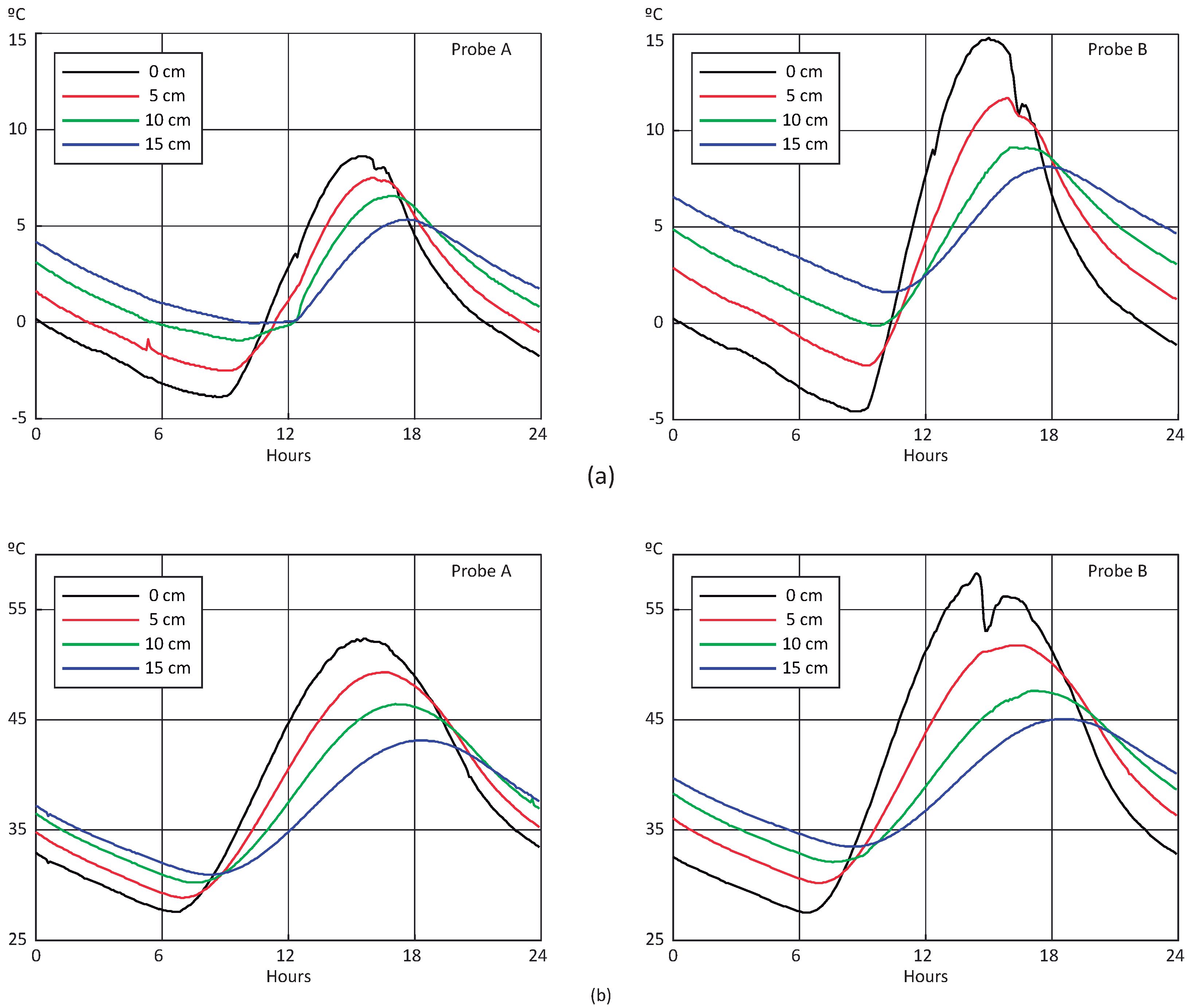
4.2. Mode 2: Data Collection
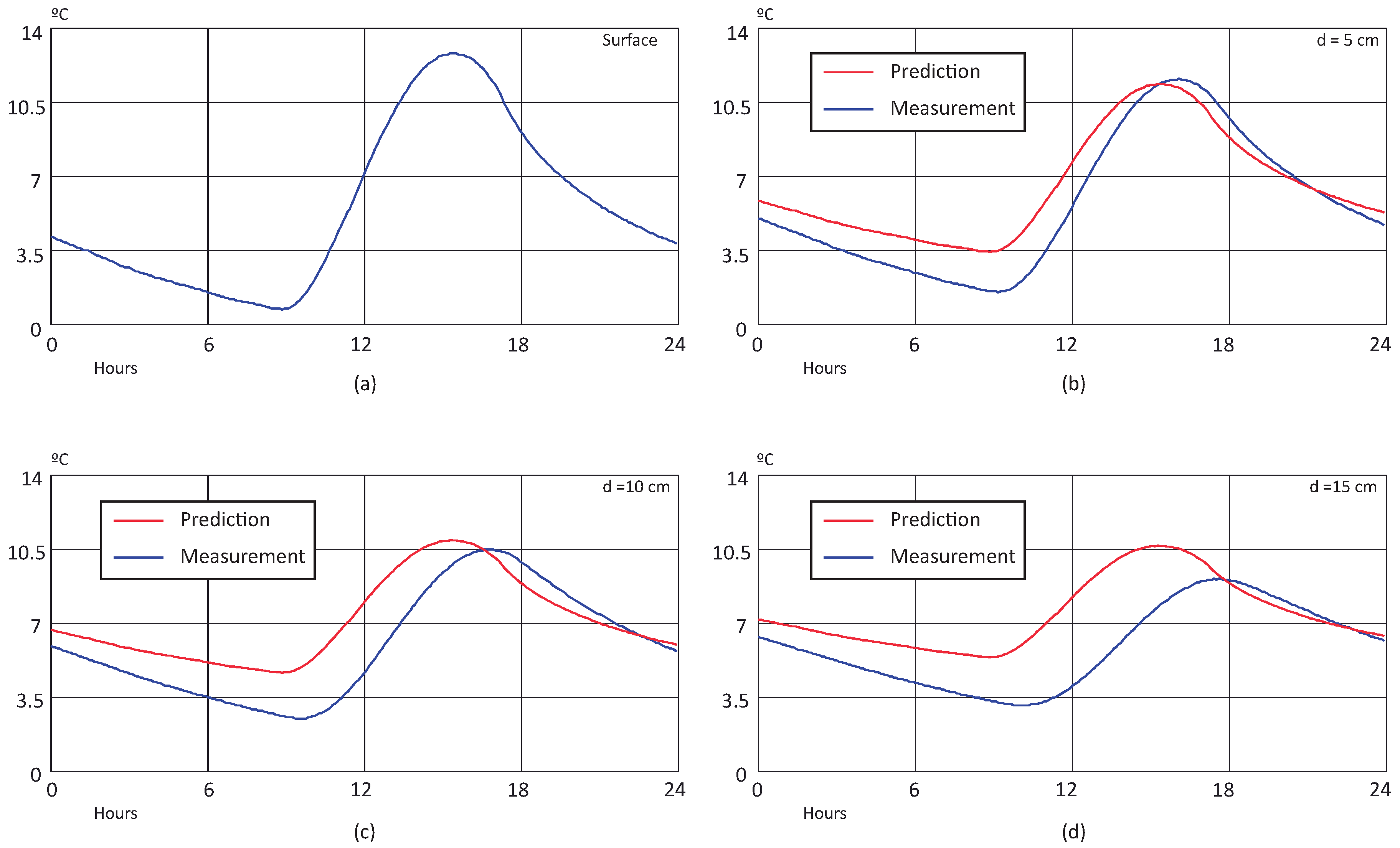
5. Pavement Modeling
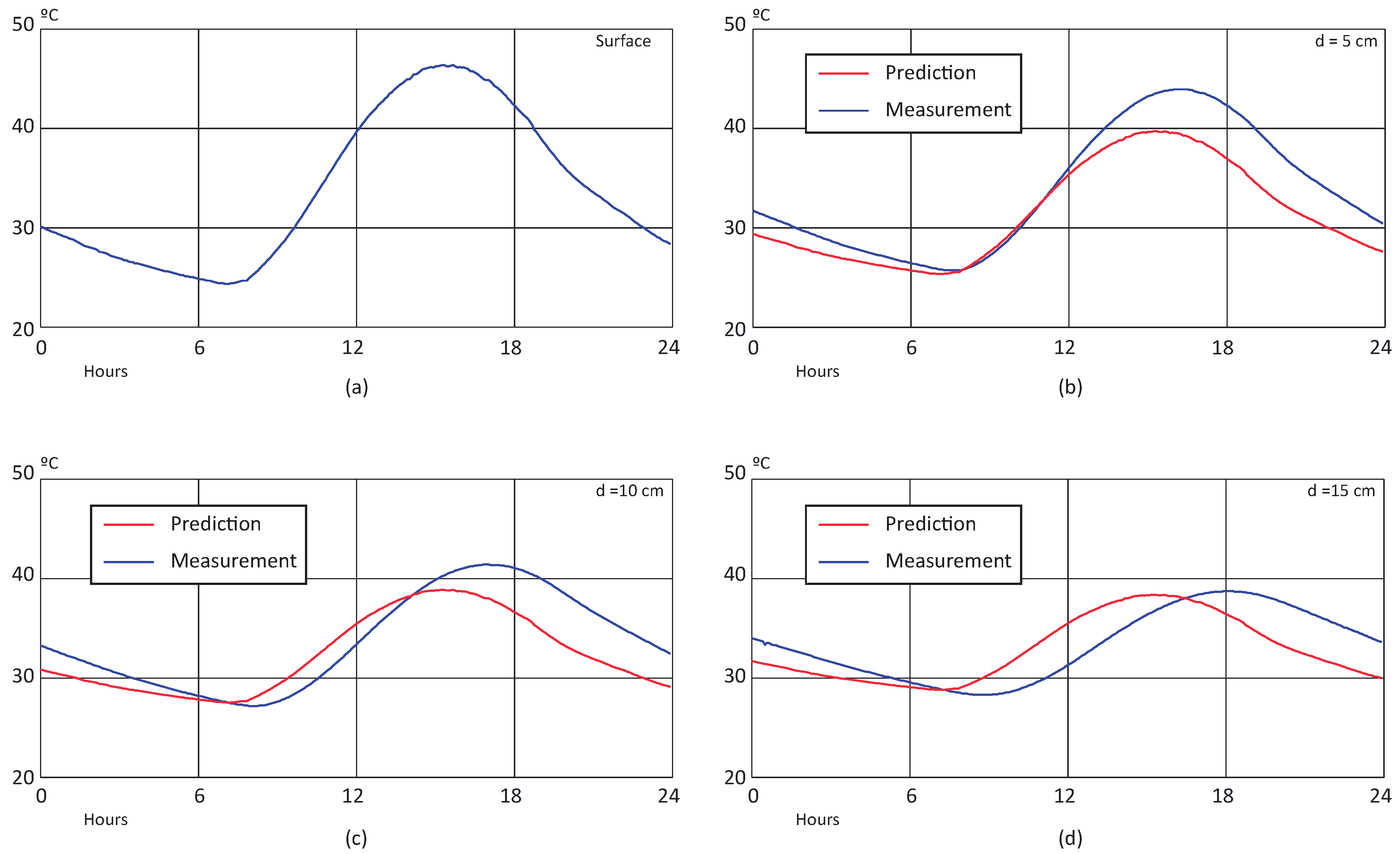
5.1. BELLS Model
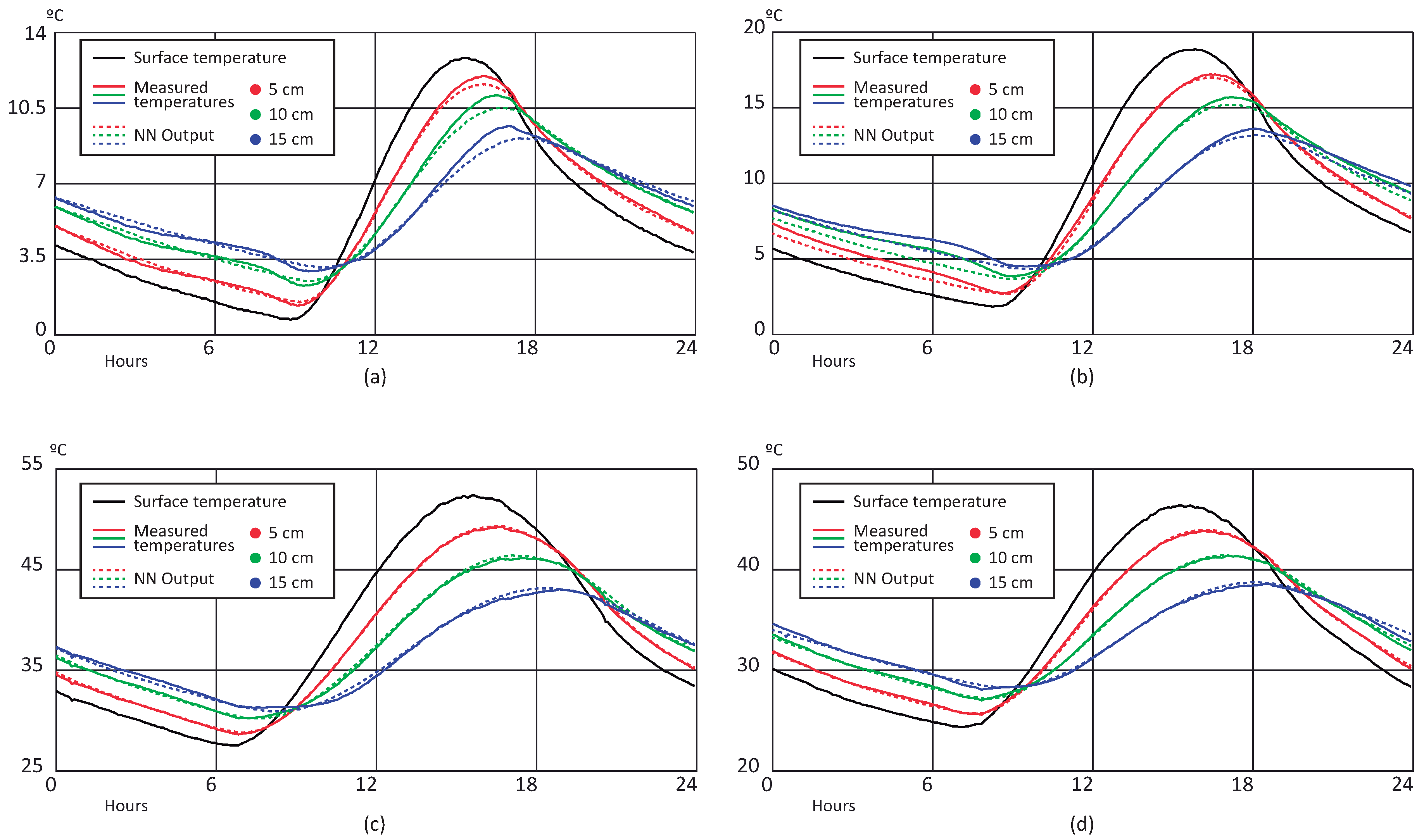
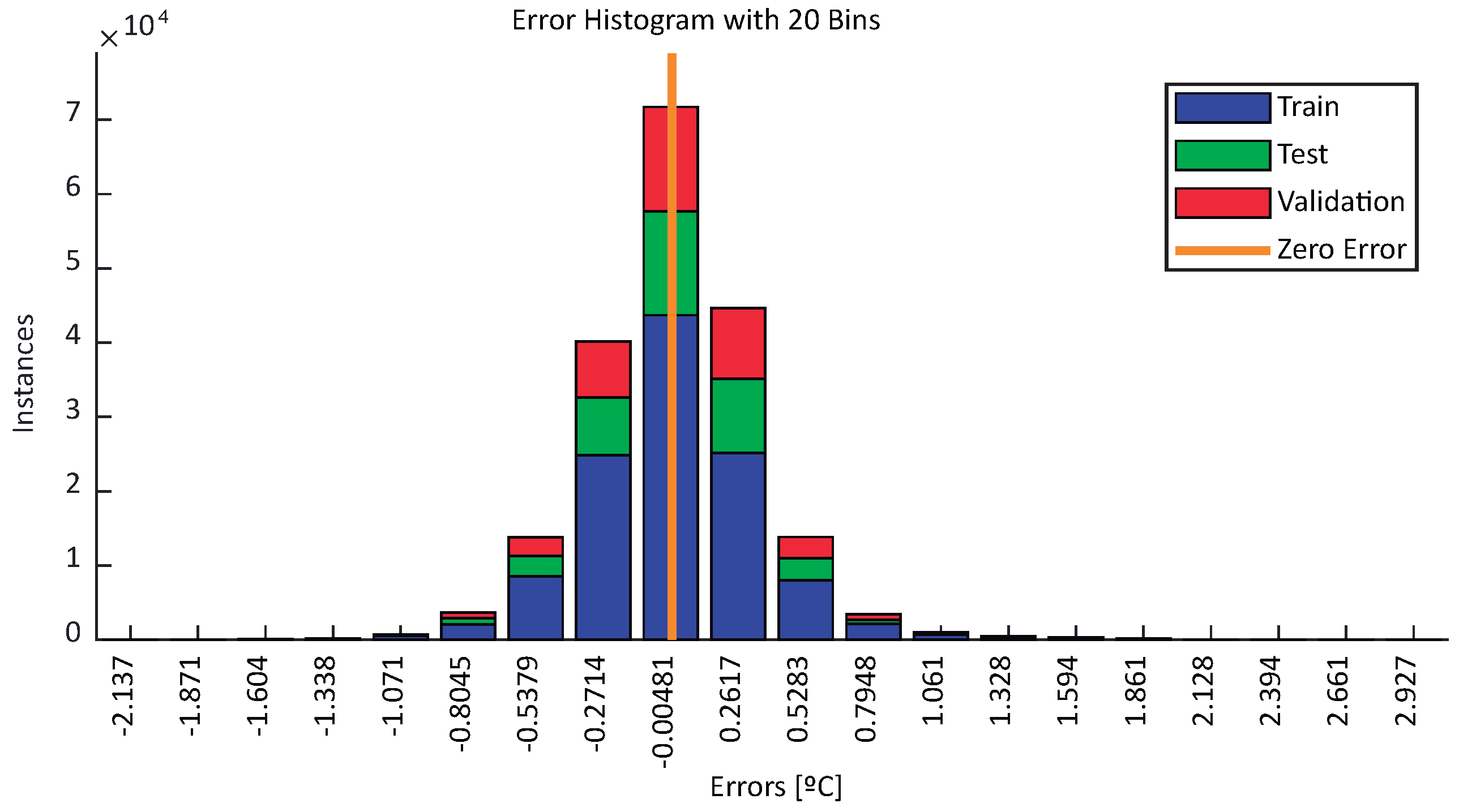
5.2. MLP Training and Validation
6. Conclusions and Future Works
Author Contributions
Funding
Acknowledgments
Conflicts of Interest
References
- Solodky, A. Organizational and economic basis for the formation of the road network in the context of regional development. Prob. Mod. Econ. 2007, 4, 278–281. [Google Scholar]
- Cantos, P.; Gumbau-Albert, M.; Maudos, J. Transport infrastructures, spillover effects and regional growth: Evidence of the Spanish case. Transp. Rev. 2005, 25, 25–50. [Google Scholar] [CrossRef] [Green Version]
- Calderón, C.; Servén, L. The Effects of Infrastructure Development on Growth and Income Distribution; Number 270; World Bank Publications: Washington, DC, USA, 2004. [Google Scholar]
- Federal Highway Administration. Long-Term Pavement Performance Program: Summary of Key Benefits 1989–2015 (FHWA-HRT-16-013); Technical Report; Federal Highway Administration: Washington, DC, USA, 2015. [Google Scholar]
- Zavyalov, M.; Kirillov, A. Evaluation methods of asphalt pavement service life. Mag. Civ. Eng. 2017, 70, 42–56. [Google Scholar]
- Biligiri, K.P.; Said, S.H. Prediction of the remaining fatigue life of flexible pavements using laboratory and field correlations. J. Mater. Civ. Eng. 2014, 27, 04014201. [Google Scholar] [CrossRef]
- Benatovvega, L. The auscultation of roads in the current technological concept [La auscultacion de carreteras en el concepto tecnologico actual]. Carreteras 2011, 4, 9–14. [Google Scholar]
- Ramos-García, J.; Castro, M. Analysis of the temperature influence on flexible pavement deflection. Constr. Build. Mater. 2011, 25, 3530–3539. [Google Scholar] [CrossRef]
- Van Geem, C.; Nigro, P.; Berlémont, B. The use of Deflection Measurements in Pavement Management of the Primary Road Network of Wallonia, Belgium. In Proceedings of the 9th International Conference on Managing Pavement Assets, Washington, DC, USA, 18–21 May 2015. [Google Scholar]
- Dawson, T.; Baladi, G.; Musunuru, G.; Prohaska, M.; Jiang, Y. Global procedure for temperature adjustment of measured pavement deflection data: Based on the long-term pavement performance Seasonal Monitoring Program. Trans. Res. Rec. J. Trans. Res. Board 2016, 2589, 146–153. [Google Scholar] [CrossRef]
- Mehta, Y.; Roque, R. Evaluation of FWD data for determination of layer moduli of pavements. J. Mater. Civ. Eng. 2003, 15, 25–31. [Google Scholar] [CrossRef]
- Precup, R.E.; Sabau, M.C.; Petriu, E.M. Nature-inspired optimal tuning of input membership functions of Takagi-Sugeno-Kang fuzzy models for anti-lock braking systems. Appl. Soft Comput. 2015, 27, 575–589. [Google Scholar] [CrossRef]
- La Fe, I.; Beruvides, G.; Quiza, R.; Haber, R.; Rivas, M. Automatic selection of optimal parameters based on simple soft computing methods. A case study on micro-milling processes. IEEE Trans. Ind. Inform. 2018. [Google Scholar] [CrossRef]
- Silveira, E.; Bonho, S. Temperature Monitoring Through Wireless Sensor Network Using an 802.15. 4/802.11 Gateway. In Proceedings of the 4th IFAC Symposium on Telematics Applications TA 2016, Porto Alwegre, Brasil, 6–9 November 2016. [Google Scholar]
- Wang, X.; Zhao, J.; Zhang, C.; Lu, H. Design and implementation of wireless sensor monitoring system for temperature and humidity based on ZigBee. Int. J. Circuits Syst. Signal Process. 2016, 10, 414–419. [Google Scholar]
- Fernández-Lozano, J.; Martín-Guzmán, M.; Martín-Ávila, J.; García-Cerezo, A. A wireless sensor network for urban traffic characterization and trend monitoring. Sensors 2015, 15, 26143–26169. [Google Scholar] [CrossRef] [PubMed]
- Godoy, J.; Milanés, V.; Pérez, J.; Villagrá, J.; Onieva, E. An auxiliary V2I network for road transport and dynamic environments. Transp. Res. Part C Emerg. Technol. 2013, 37, 145–156. [Google Scholar] [CrossRef] [Green Version]
- Lukanen, E.O.; Stubstad, R.; Briggs, R. Temperature Predictions and Adjustment Factors for Asphalt Pavement; Technical Report; Federal Highway Administration: Washington, DC, USA, 2000. [Google Scholar]
- Baltzer, S.; Ertman-Larson, H.; Lukanen, E.; Stubstad, R. Prediction of AC mat temperatures for routine load/deflection measurements. In Proceedings of the 4th International Conference, Bearing Capacity of Roads and Airfields, Minneapolis, MN, USA, 17–21 August 1994; Volume 1, pp. 401–412. [Google Scholar]
- Castaño, F.; Beruvides, G.; Villalonga, A.; Haber, R.E. Self-Tuning Method for Increased Obstacle Detection Reliability Based on Internet of Things LiDAR Sensor Models. Sensors 2018, 18, 1508. [Google Scholar] [CrossRef] [PubMed]
- Castaño, F.; Beruvides, G.; Haber, R.E.; Artuñedo, A. Obstacle Recognition Based on Machine Learning for On-Chip LiDAR Sensors in a Cyber-Physical System. Sensors 2017, 17, 2109. [Google Scholar] [CrossRef] [PubMed]
- Beruvides, G.; Castaño, F.; Haber, R.E.; Quiza, R.; Villalonga, A. Coping with Complexity When Predicting Surface Roughness in Milling Processes: Hybrid Incremental Model with Optimal Parametrization. Complexity 2017, 2017, 7317254. [Google Scholar] [CrossRef]
- Haykin, S.S.; Haykin, S.S.; Haykin, S.S.; Haykin, S.S. Neural Networks and Learning Machines; Pearson Education, Inc.: Pearson Upper Saddle River, NJ, USA, 2009; Volume 3. [Google Scholar]
- Haber, R.E.; Alique, J.R. Nonlinear internal model control using neural networks: An application for machining processes. Neural Comput. Appl. 2004, 13, 47–55. [Google Scholar] [CrossRef]
- Milanes, V.; Villagra, J.; Godoy, J.; Simo, J.; Pérez, J.; Onieva, E. An intelligent V2I-based traffic management system. IEEE Trans. Intell. Transp. Syst. 2012, 13, 49–58. [Google Scholar] [CrossRef]
- Santa, J.; Pereniguez, F.; Moragón, A.; Skarmeta, A.F. Vehicle-to-infrastructure messaging proposal based on CAM/DENM specifications. In Proceedings of the 2013 IFIP Wireless Days (WD), Valencia, Spain, 13–15 November 2013; pp. 1–7. [Google Scholar]
- Andújar Márquez, J.M.; Martínez Bohórquez, M.Á.; Gómez Melgar, S. Ground thermal diffusivity calculation by direct soil temperature measurement. Application to very low enthalpy geothermal energy systems. Sensors 2016, 16, 306. [Google Scholar] [CrossRef] [PubMed]
- Alique, A.; Haber, R.E.; Haber, R.H.; Ros, S.; Gonzalez, C. A neural network-based model for the prediction of cutting force in milling process. A progress study on a real case. In Proceedings of the 2000 IEEE International Symposium on Intelligent Control, Rio Patras, 19 July 2000; pp. 121–125. [Google Scholar]














{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| BELLS2 | 2.78 | 0.912 | −1.25 | −0.428 | 0.553 | 2.63 | 0.027 |
| BELLS3 | 0.95 | 0.892 | −1.25 | −0.448 | 0.621 | 1.83 | 0.042 |
| Scenario\Case | 5 cm | 10 cm | 15 cm | All |
|---|---|---|---|---|
| Winter | 35.33 | 33.46 | 36.54 | 35.11 |
| Summer | 6.55 | 6.54 | 7.13 | 6.74 |
| Scenario\Case | 5 cm | 10 cm | 15 cm | All |
|---|---|---|---|---|
| Winter Test | 2.65 | 2.71 | 2.99 | 2.78 |
| Winter Validation | 5.14 | 6.21 | 4.71 | 5.35 |
| Summer Test | 0.24 | 0.46 | 0.68 | 0.46 |
| Summer Validation | 0.35 | 0.41 | 0.53 | 0.43 |
© 2018 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Godoy, J.; Haber, R.; Muñoz, J.J.; Matía, F.; García, Á. Smart Sensing of Pavement Temperature Based on Low-Cost Sensors and V2I Communications. Sensors 2018, 18, 2092. https://doi.org/10.3390/s18072092
Godoy J, Haber R, Muñoz JJ, Matía F, García Á. Smart Sensing of Pavement Temperature Based on Low-Cost Sensors and V2I Communications. Sensors. 2018; 18(7):2092. https://doi.org/10.3390/s18072092
Chicago/Turabian StyleGodoy, Jorge, Rodolfo Haber, Juan Jesús Muñoz, Fernando Matía, and Álvaro García. 2018. "Smart Sensing of Pavement Temperature Based on Low-Cost Sensors and V2I Communications" Sensors 18, no. 7: 2092. https://doi.org/10.3390/s18072092
APA StyleGodoy, J., Haber, R., Muñoz, J. J., Matía, F., & García, Á. (2018). Smart Sensing of Pavement Temperature Based on Low-Cost Sensors and V2I Communications. Sensors, 18(7), 2092. https://doi.org/10.3390/s18072092