A PolSAR Image Segmentation Algorithm Based on Scattering Characteristics and the Revised Wishart Distance



Abstract
:1. Introduction
2. PolSAR Image Model
3. The Proposed Method
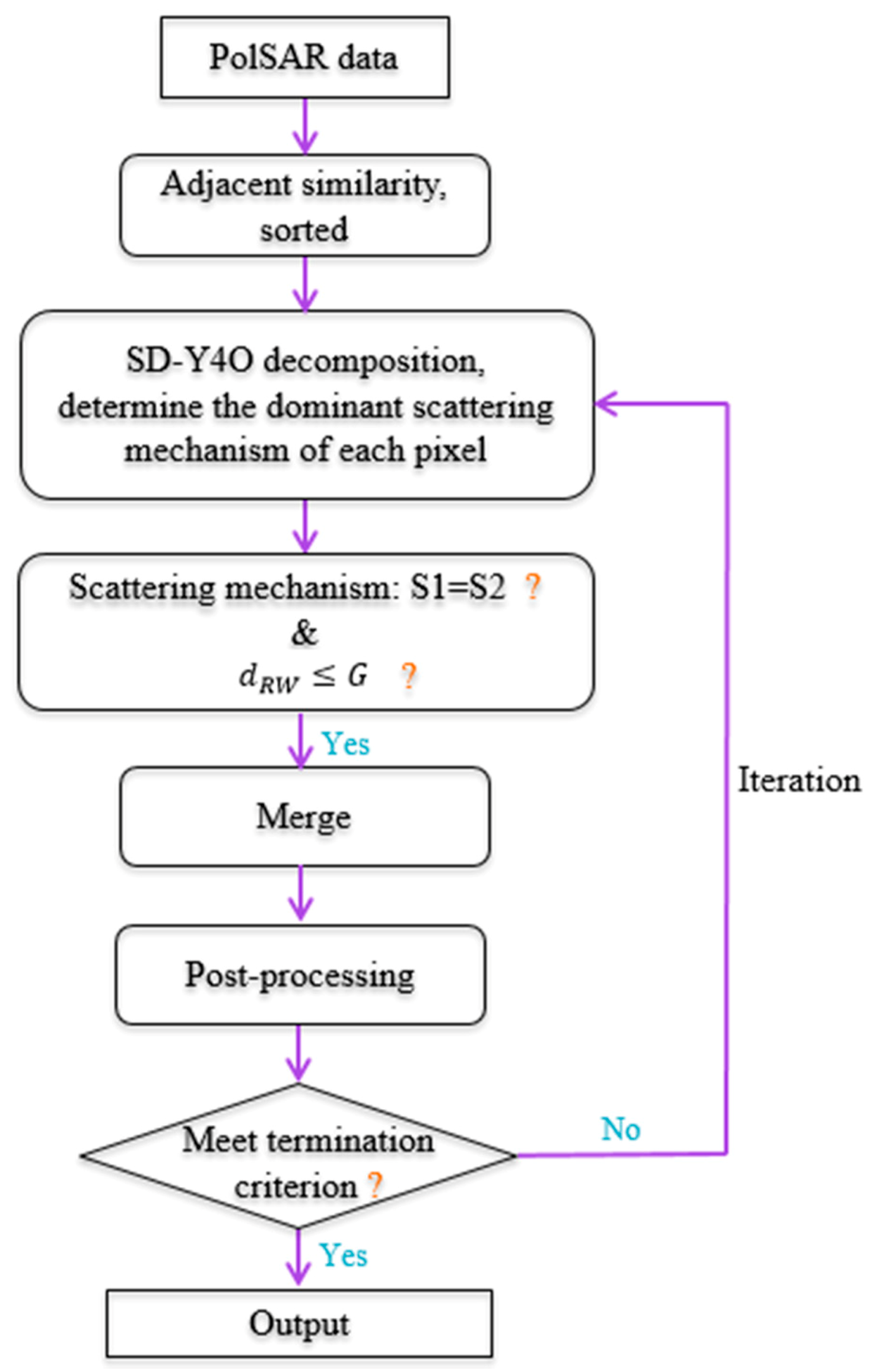
3.1. Details of the Processing Steps
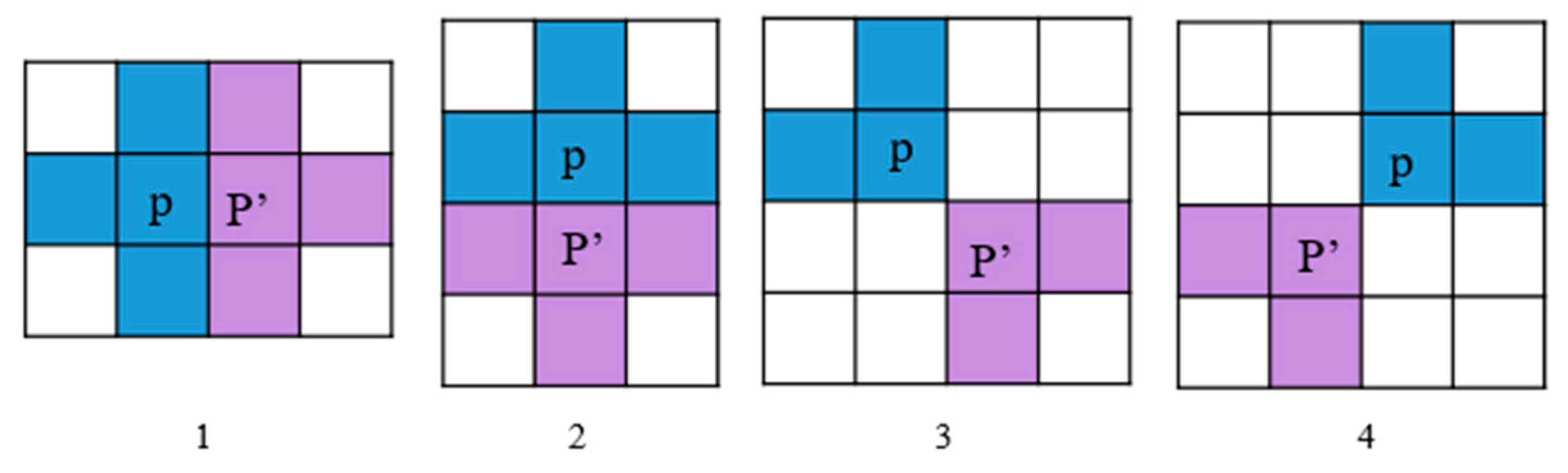
- Compute the similarity of each pixel by Equation (8) according to the eight-neighborhood estimation model in Figure 2. Sort all the similarities in descending order.
- Apply SD-Y4O decomposition to determine the dominant scattering mechanism of each pixel in the PolSAR image.
- Calculate the revised Wishart distance of two adjacent pixels which are of the same scattering mechanism according to the descending order of similarities. If the revised Wishart distance is smaller than the threshold set, merge the two adjacent pixels.
- The postprocessing step is applied after the pixels in the PolSAR image are all processed.
- After determining the labels of all the pixels, compute the average covariance matrix of the pixels with the same label in the original image, and replace their covariance matrices with the average covariance matrix.
- The segmented images are iteratively decomposed and merged until the number of pixels whose label changes is less than 5%.
3.2. Merging Order
3.3. Merging Predicate
3.3.1. The Dominant Scattering Mechanisms
3.3.2. The Revised Wishart Distance
3.4. Postprocessing
4. Experiments and Results
4.1. Evaluation on Two RADARSAT-2 PolSAR Images
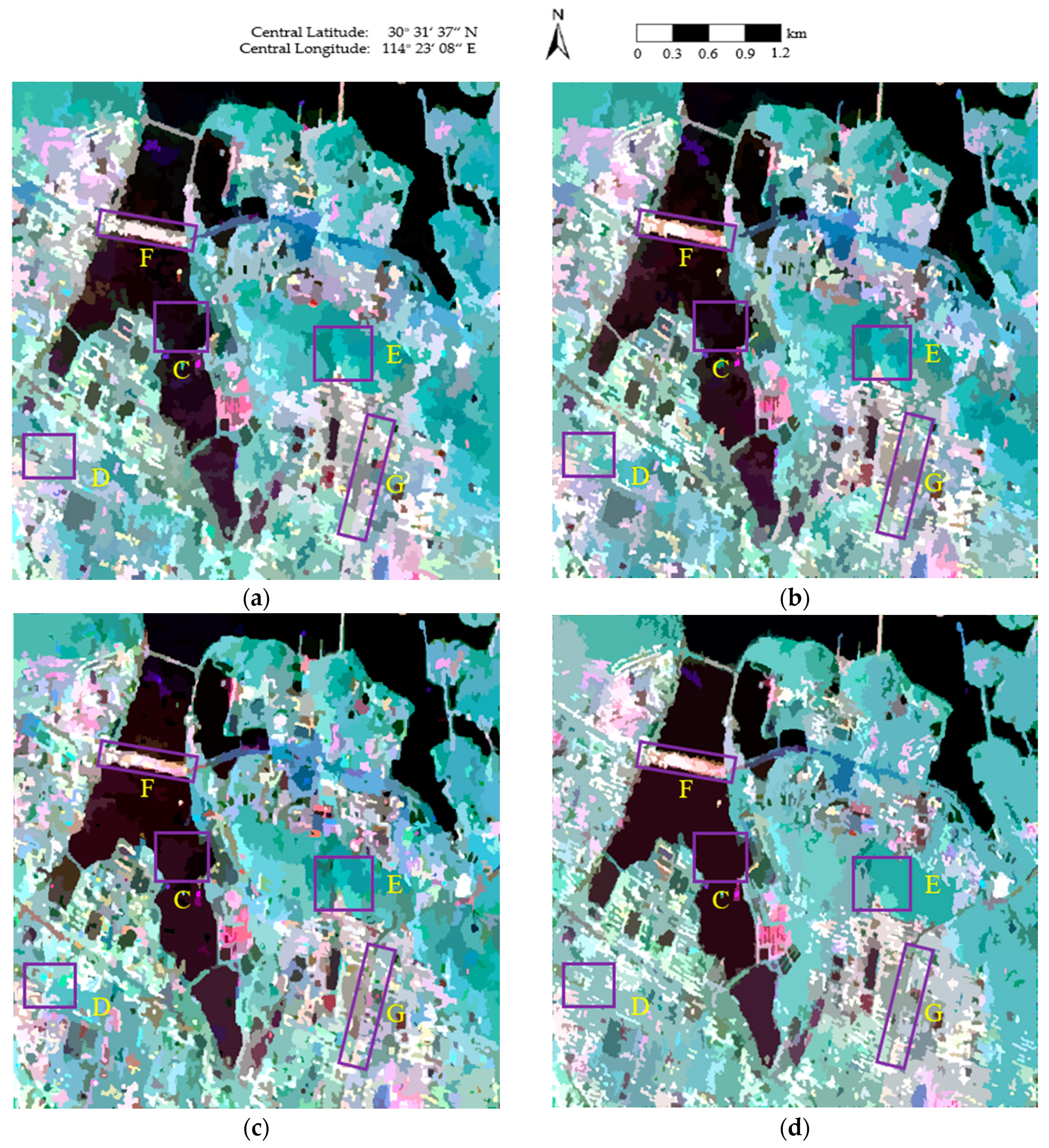
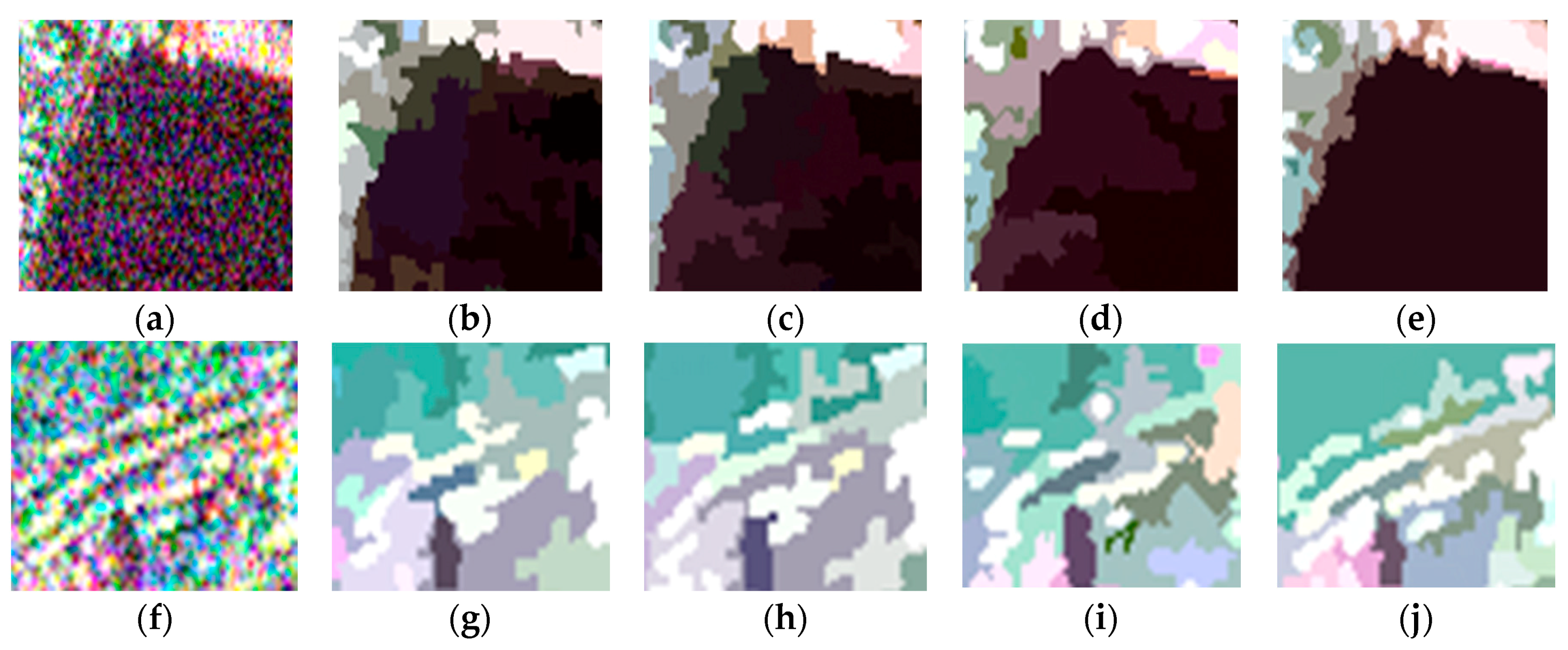
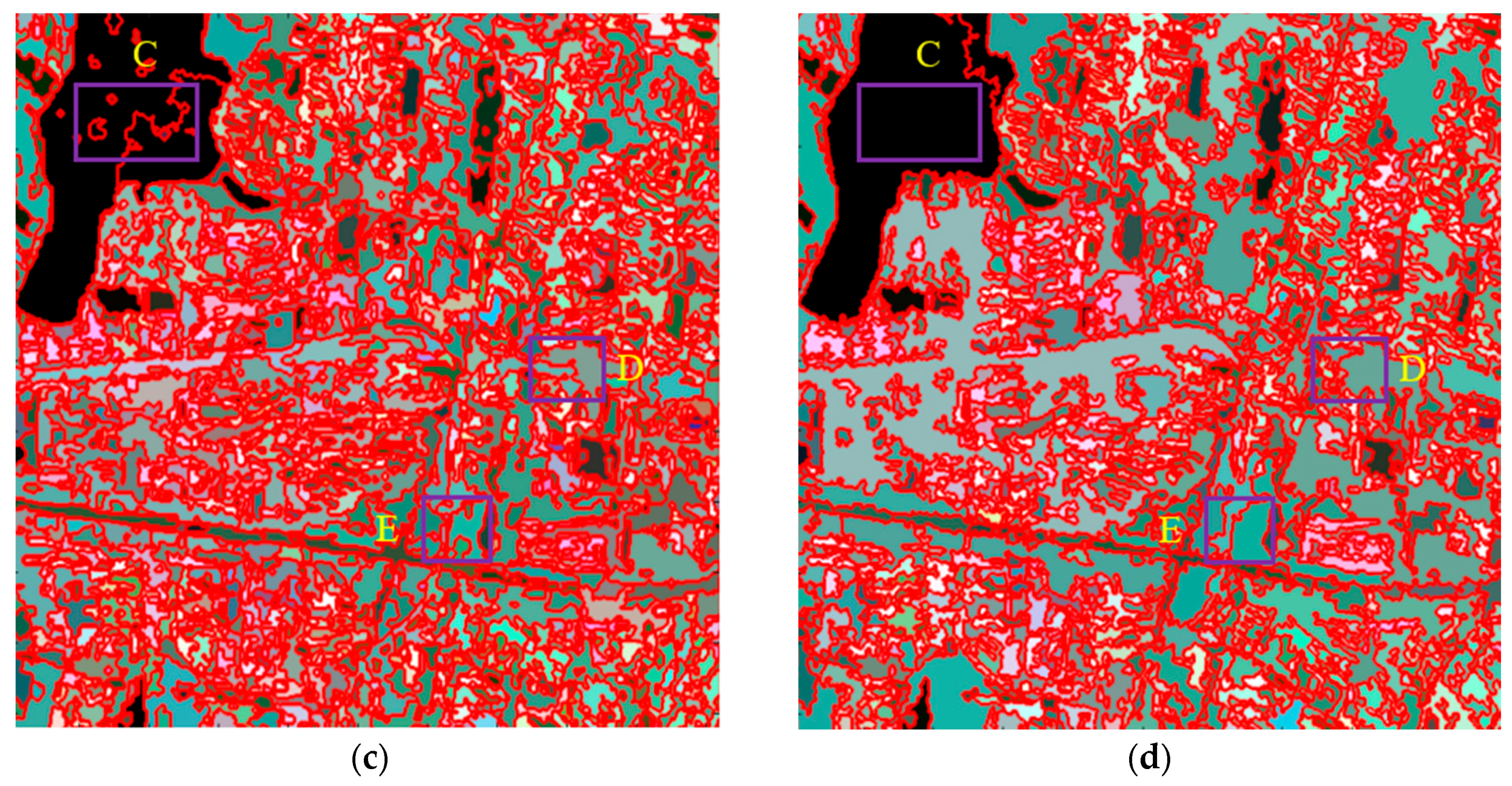
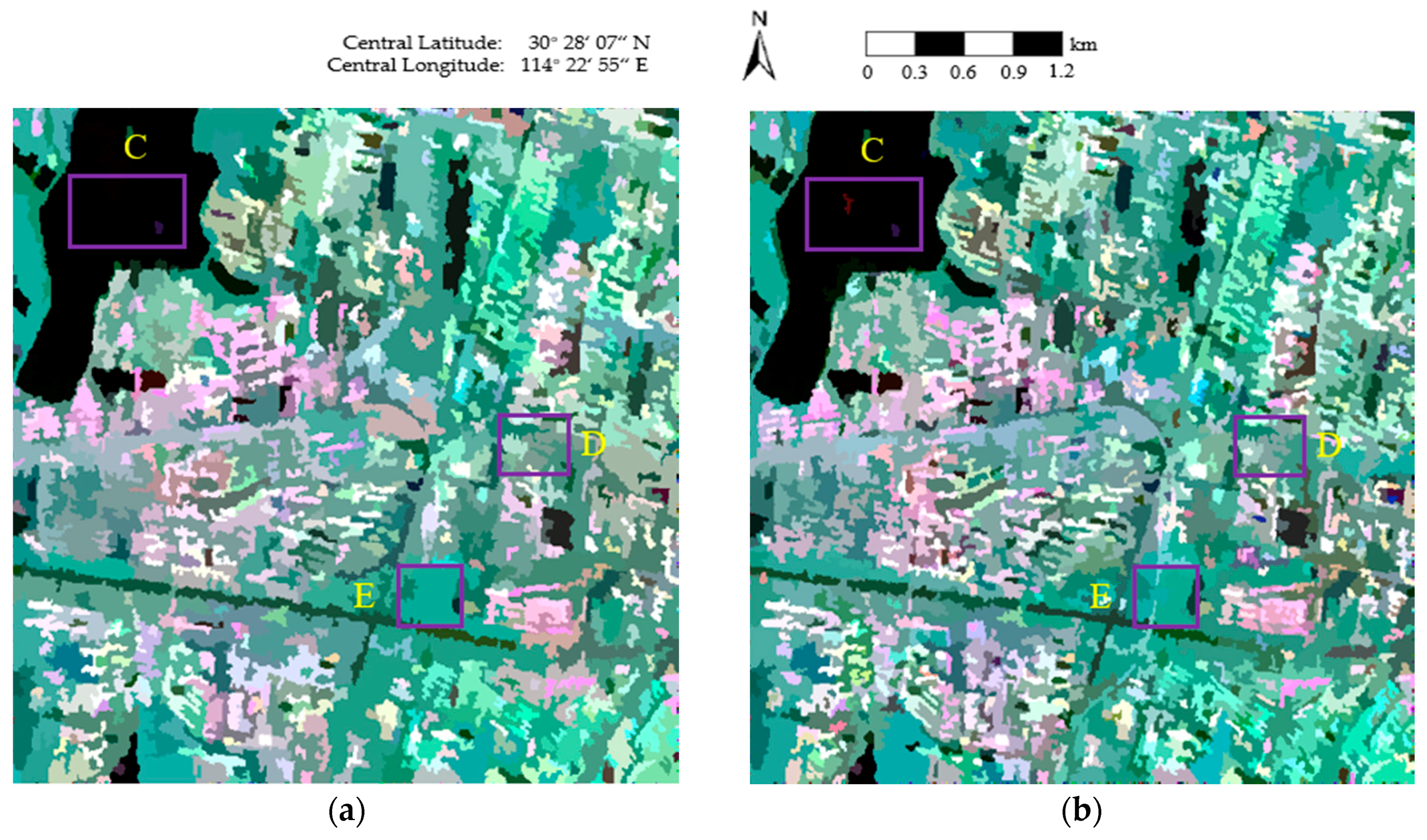
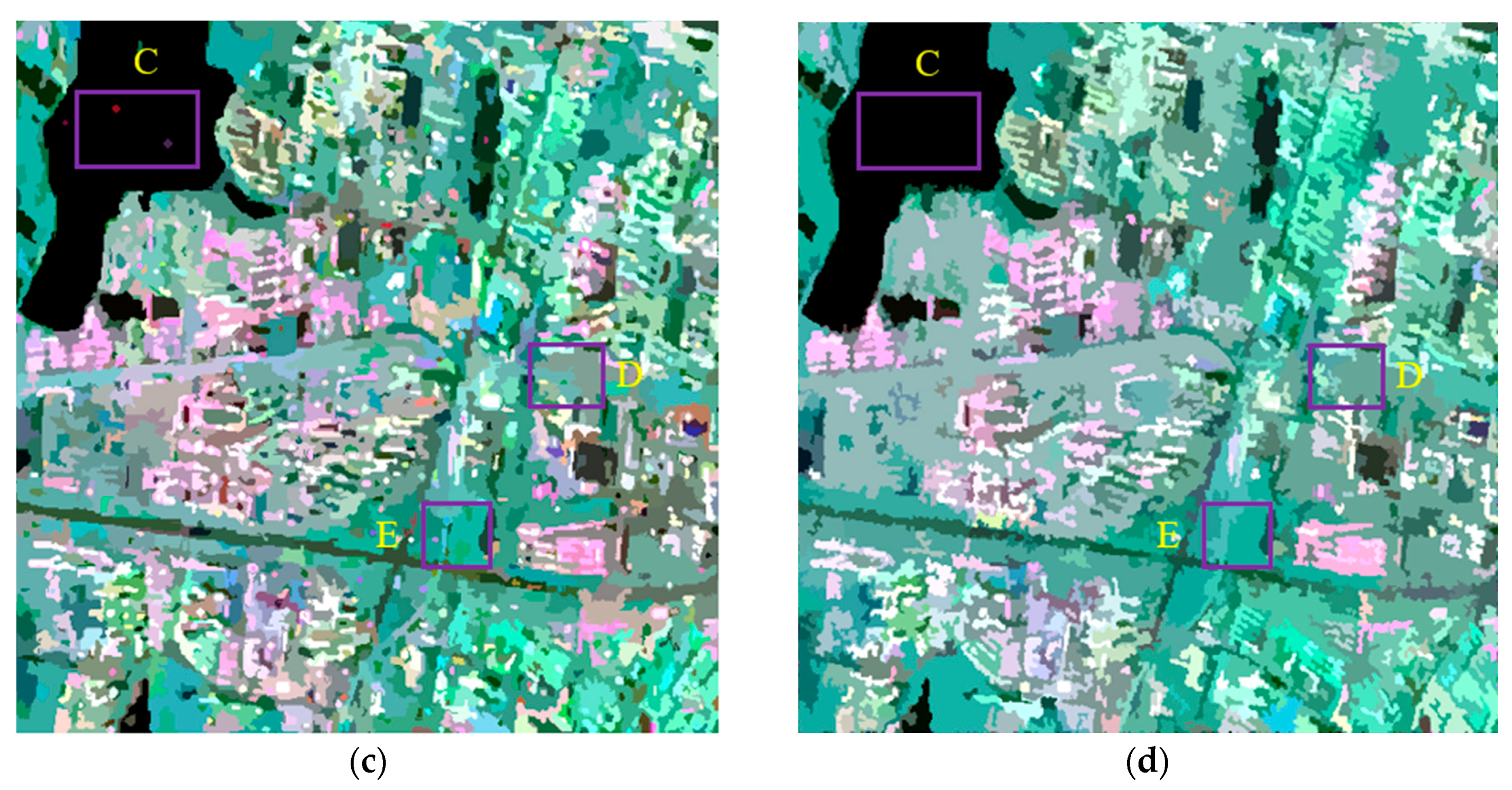
4.1.1. Evaluation on the First Data Set
4.1.2. Evaluation on the Second Data Set
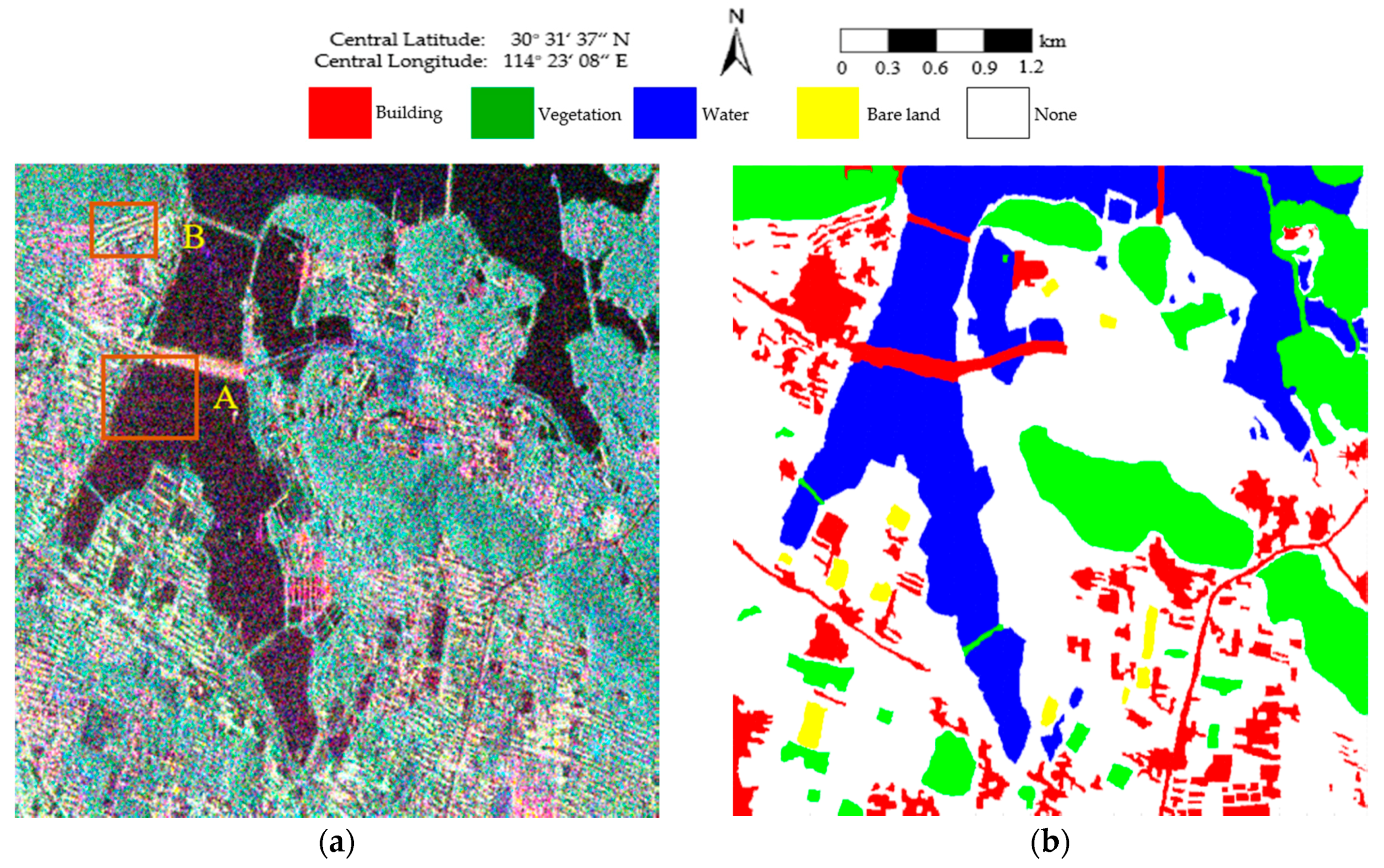
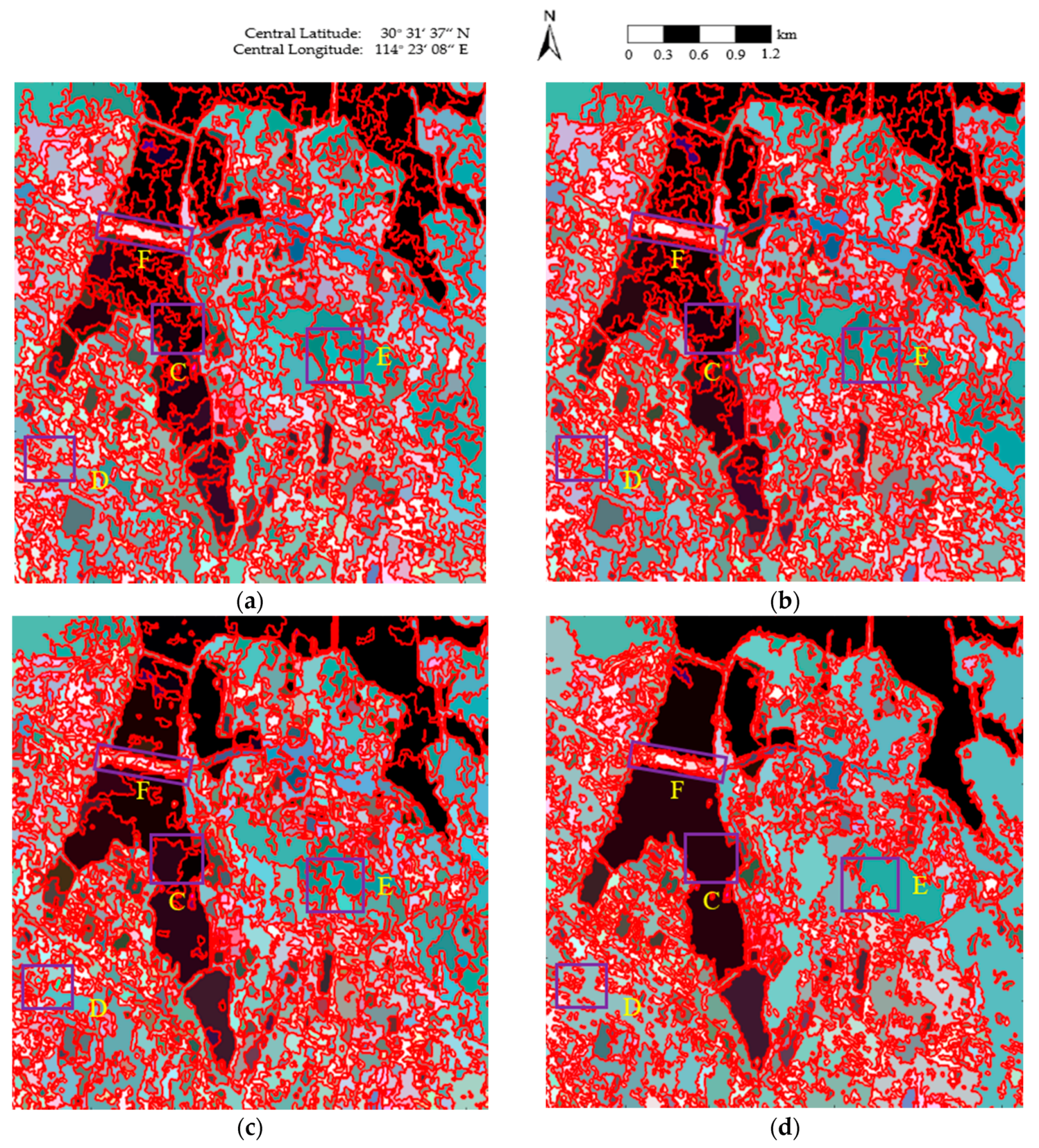
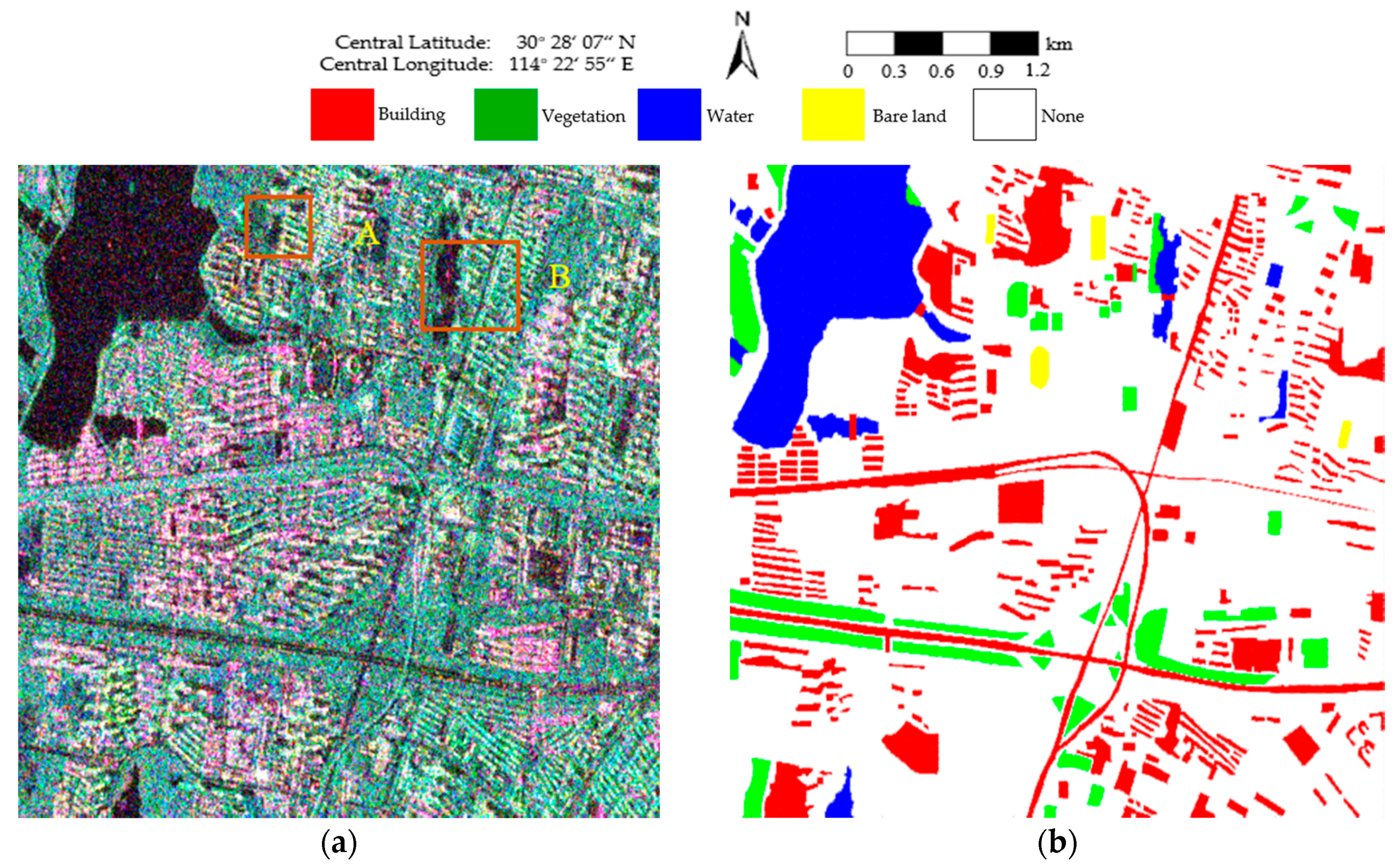
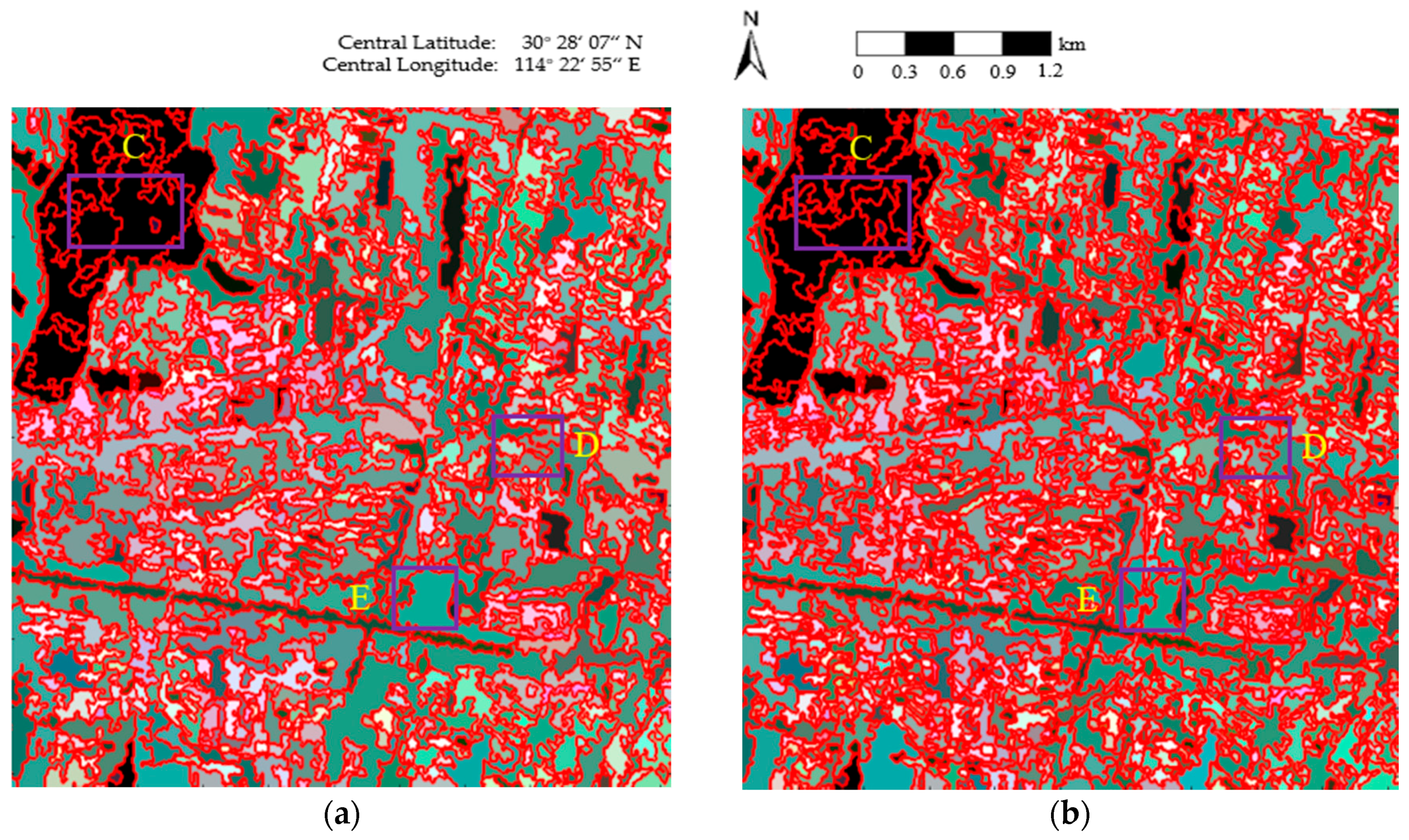
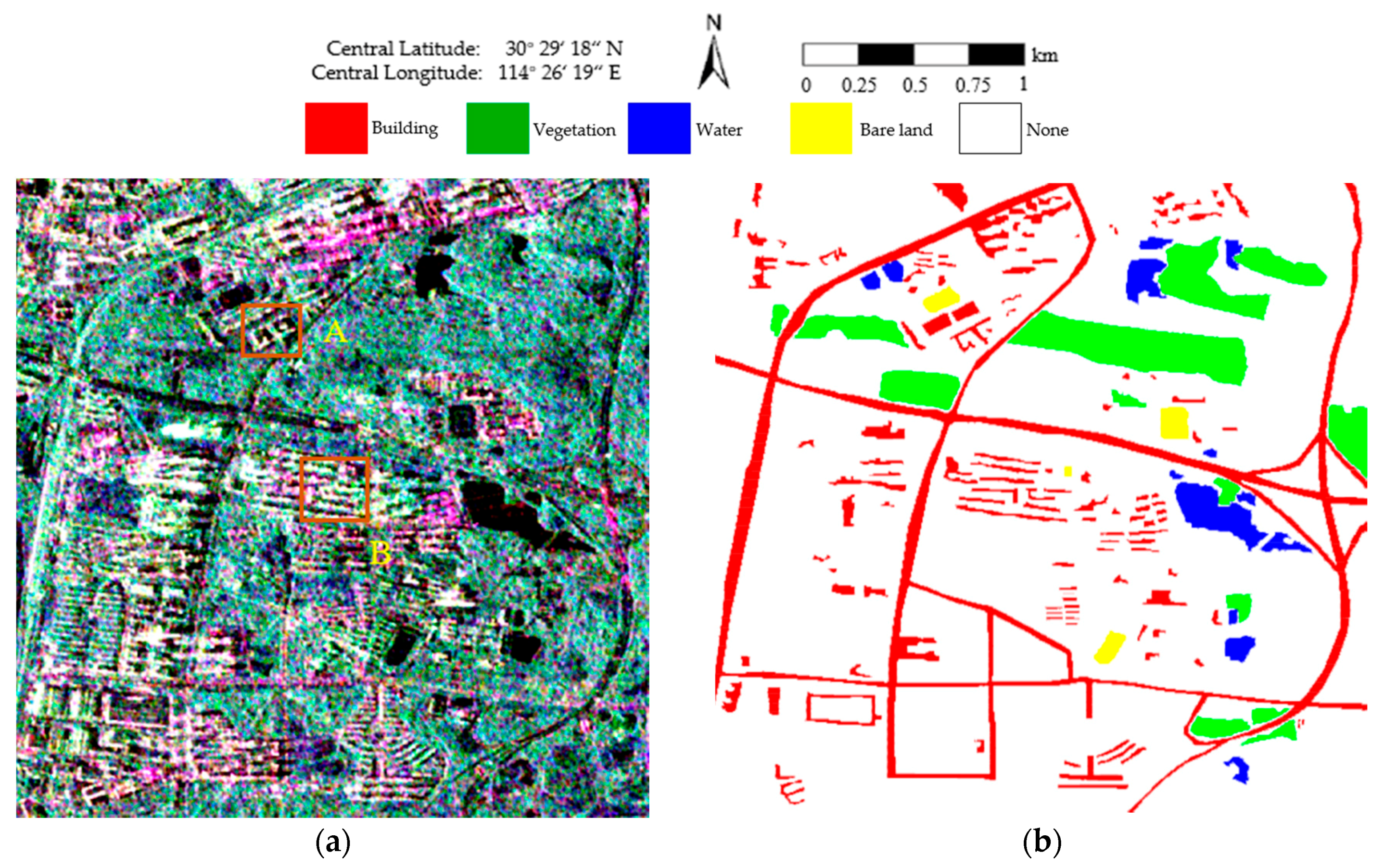
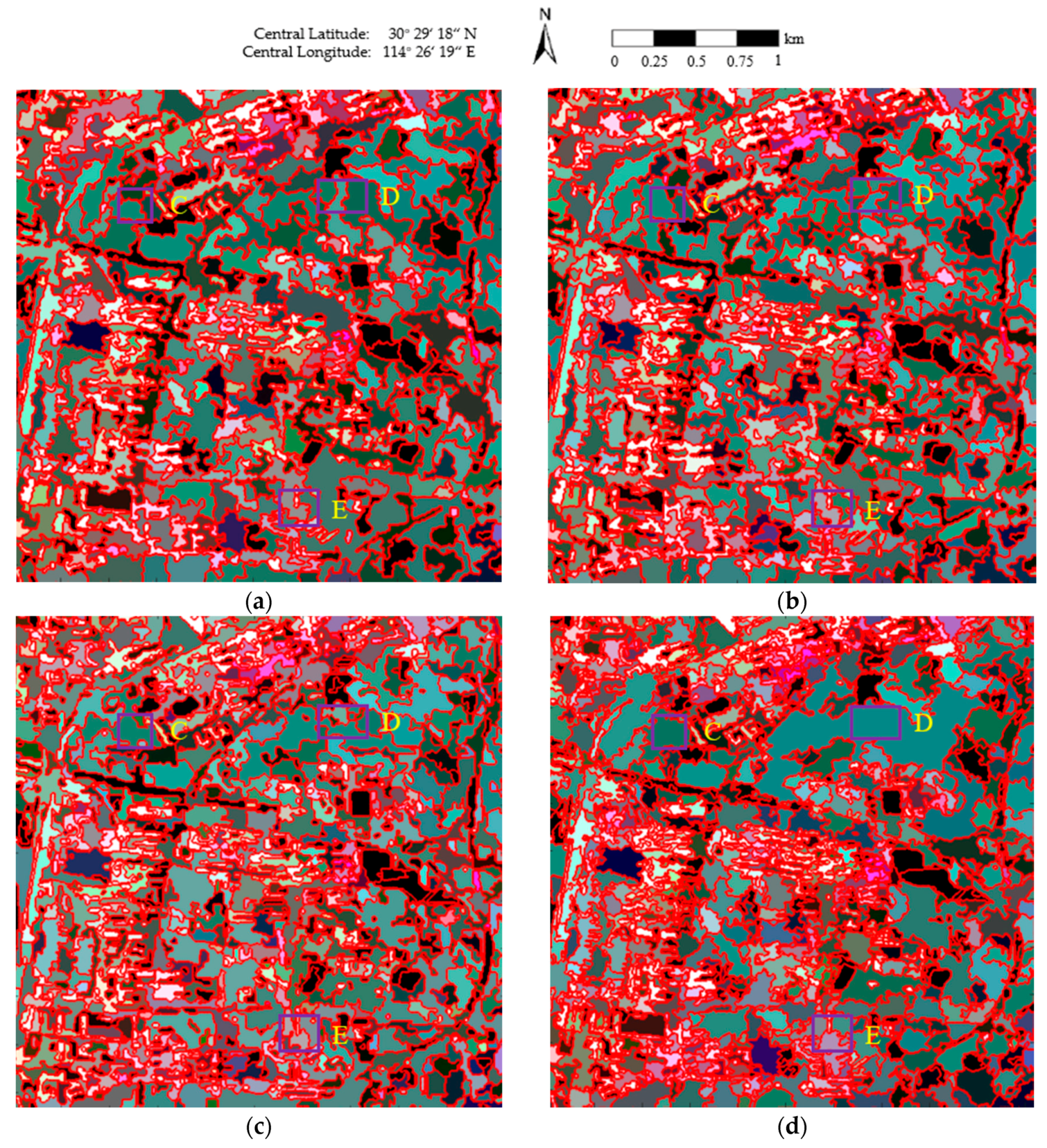
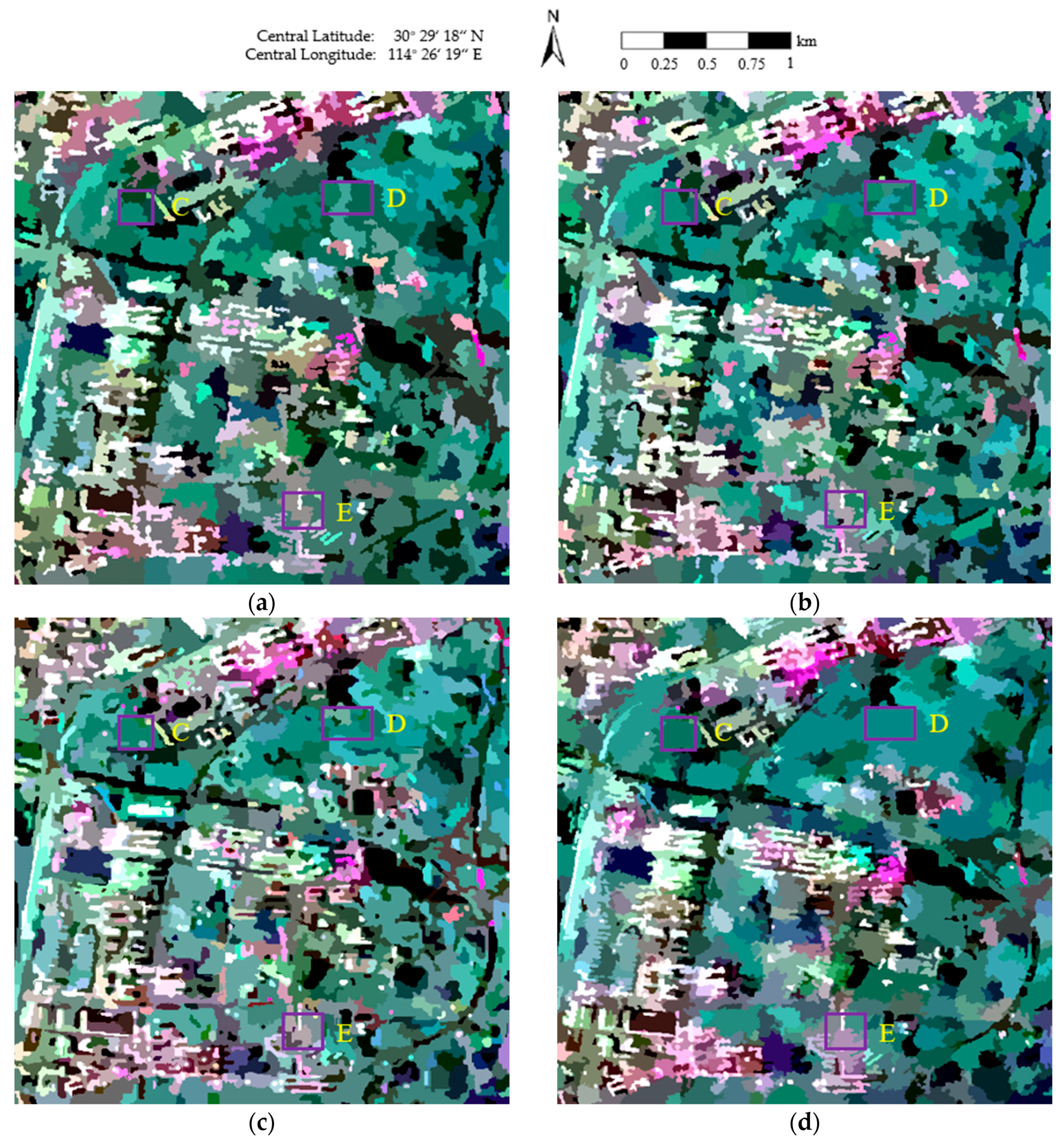
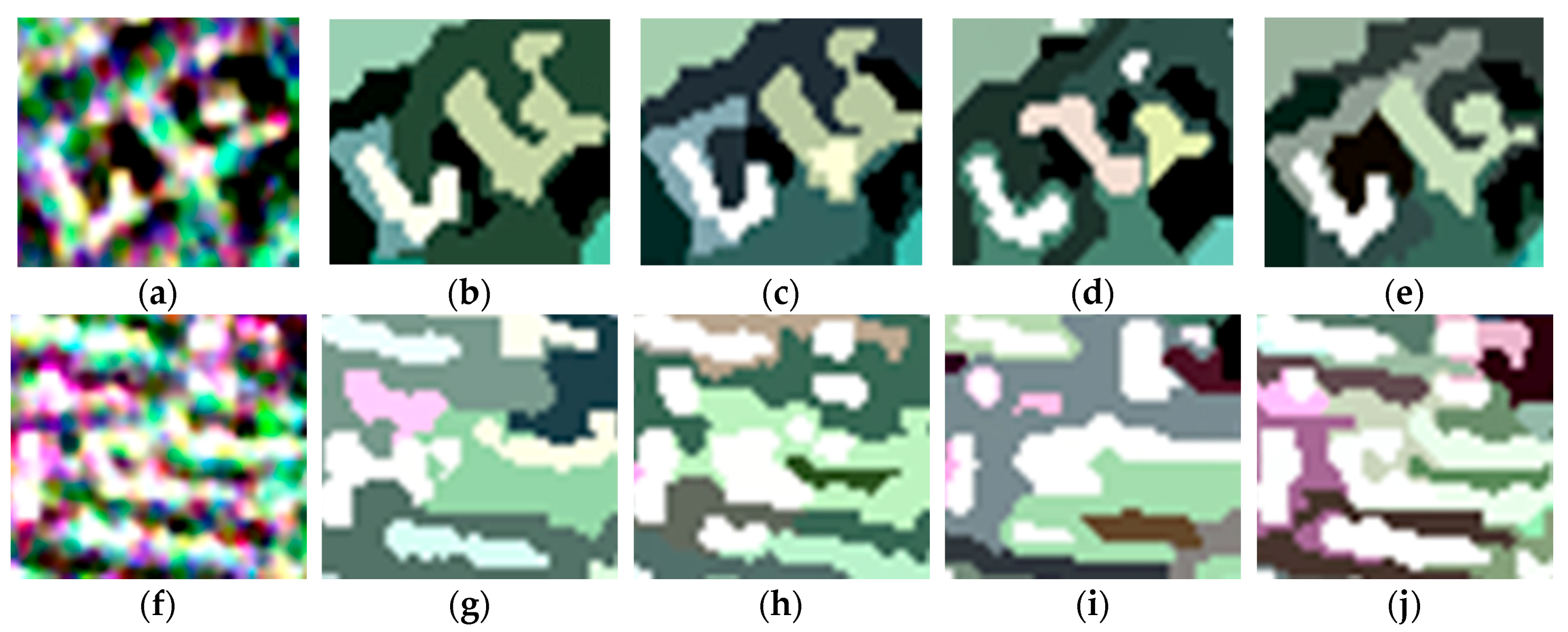
4.2. Evaluation on a GF-3 PolSAR Image
5. Discussion
- (1)
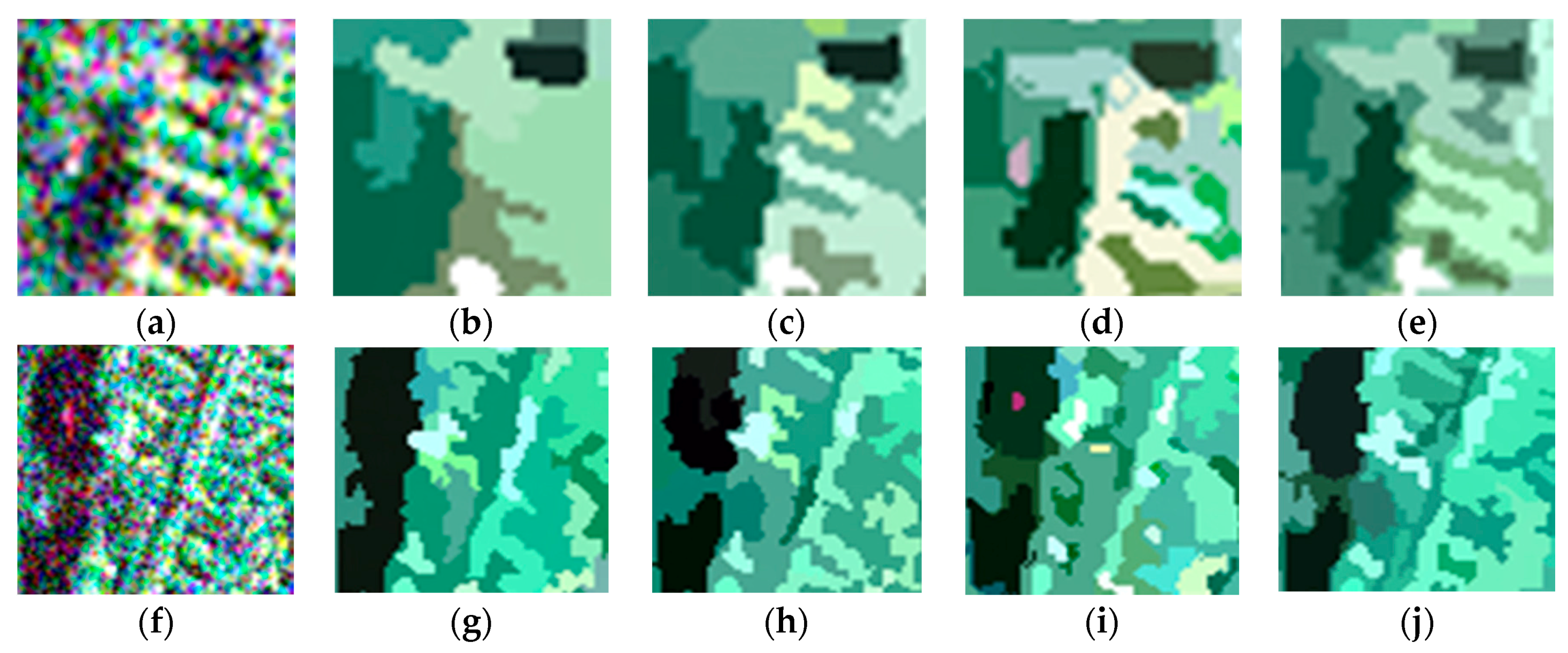
- The revised Wishart distance can accurately characterize the similarity between covariance matrices, which is conducive to the precise determination of homogeneous regions, contributing to the suppression of speckle noise.
- (2)
- The judgment of the same scattering mechanism helps to generate accurate segmentation boundaries between the different classes, resulting in perfect preservation of the feature details.
- (3)
- The SD-Y4O decomposition and merging processes are iteratively executed until the termination criterion is met, which contributes to the accurate segmentation results.
- (1)
- The proposed method is implemented by manually setting the revised Wishart distance threshold, and is thus affected by subjective factors to some extent.
6. Conclusions
Author Contributions
Funding
Acknowledgments
Conflicts of Interest
References
- Souyris, J.; Henry, C.; Adragna, F. On the use of complex SAR image spectral analysis for target detection: Assessment of polarimetry. IEEE Trans. Geosci. Remote Sens. 2003, 41, 2725–2734. [Google Scholar] [CrossRef]
- Liu, C.; Gierull, C.H. A New Application for PolSAR Imagery in the Field of Moving Target Indication/Ship Detection. IEEE Trans. Geosci. Remote Sens. 2007, 45, 3426–3436. [Google Scholar] [CrossRef]
- Scheuchl, B.; Flett, D.; Caves, R.; Cumming, I.G. Potential of RADARSAT-2 data for operational sea ice monitoring. Can. J. Remote Sens. 2004, 30, 448–461. [Google Scholar] [CrossRef]
- Nakamura, K.; Wakabayashi, H.; Naoki, K.; Nishio, F.; Moriyama, T.; Uratsuka, S. Observation of sea-ice thickness in the sea of Okhotsk by using dual-frequency and fully polarimetric airborne SAR (pi-SAR) data. IEEE Trans. Geosci. Remote Sens. 2005, 43, 2460–2469. [Google Scholar] [CrossRef]
- Park, N.W.; Chi, K.H. Integration of multitemporal/polarization C-band SAR data sets for land-cover classification. Int. J. Remote Sens. 2008, 29, 4667–4688. [Google Scholar] [CrossRef]
- Brisco, B.; Brown, R.J. Agricultural applications with radar. In Principles & Applications of Imaging Radar, 2nd ed.; Henderson, F.M., Lewis, A.J., Eds.; Wiley: New York, NY, USA, 1998; Volume 2. [Google Scholar]
- Cloude, S.R.; Pottier, E. A review of target decomposition theorems in radar polarimetry. IEEE Trans. Geosci. Remote Sens. 1996, 34, 498–518. [Google Scholar] [CrossRef]
- Cloude, S.R.; Pottier, E. An entropy based classification scheme for land applications of polarimetric SAR. IEEE Trans. Geosci. Remote Sens. 1997, 35, 68–78. [Google Scholar] [CrossRef]
- Dubois, P.; Van Zyl, J.J.; Engman, T. Measuring soil moisture with imaging radars. IEEE Trans. Geosci. Remote Sens. 1995, 33, 915–926. [Google Scholar] [CrossRef] [Green Version]
- Schuler, D.L.; Lee, J.; De Grandi, G. Measurement of topography using polarimetric SAR images. IEEE Trans. Geosci. Remote Sens. 1996, 34, 1266–1277. [Google Scholar] [CrossRef]
- Wang, C.H.; Liao, G.H.; Zhang, Q.J. First Spaceborne SAR-GMTI Experimental Results for the Chinese Gaofen-3 Dual-Channel SAR Sensor. Sensors 2017, 17, 2683. [Google Scholar] [CrossRef] [PubMed]
- Wang, L.; Xu, X.; Dong, H.; Gui, R.; Pu, F.L. Multi-Pixel Simultaneous Classification of PolSAR Image Using Convolutional Neural Networks. Sensors 2018, 18, 769. [Google Scholar] [CrossRef] [PubMed]
- Xiang, Y.M.; Wang, F.; You, H.J. An Automatic and Novel SAR Image Registration Algorithm: A Case Study of the Chinese GF-3 Satellite. Sensors 2018, 18, 672. [Google Scholar] [CrossRef] [PubMed]
- Sun, J.L.; Yu, W.D.; Deng, Y.K. The SAR Payload Design and Performance for the GF-3 Mission. Sensors 2017, 17, 2419. [Google Scholar] [CrossRef] [PubMed]
- Shao, W.Z.; Sheng, Y.X.; Sun, J. Preliminary Assessment of Wind and Wave Retrieval from Chinese Gaofen-3 SAR Imagery. Sensors 2017, 17, 1705. [Google Scholar] [CrossRef] [PubMed]
- Han, B.; Ding, C.B.; Zhong, L.H.; Liu, J.Y.; Qiu, X.L.; Hu, Y.X.; Lei, B. The GF-3 SAR Data Processor. Sensors 2018, 18, 835. [Google Scholar] [CrossRef] [PubMed]
- Oliver, C.J.; Quegan, S. Understanding SAR Images; Artech House: Norwood, MA, USA, 1998. [Google Scholar]
- Macripellizzeri, T.; Oliver, C.J.; Lombardo, P. Segmentation-based joint classification of SAR and optical images. IEE Proc.-Radar Sonar Navig. 2002, 149, 281–296. [Google Scholar] [CrossRef]
- Stewart, D.; Blacknell, D.; Blake, A.; Cook, R.; Oliver, C.J. Optimal approach to SAR image segmentation and classification. IEE Proc.-Radar Sonar Navig. 2000, 147, 134–142. [Google Scholar] [CrossRef] [Green Version]
- Dong, Y.; Milne, A.K.; Forster, B. Segmentation and classification of vegetated areas using polarimetric SAR image data. IEEE Trans. Geosci. Remote Sens. 2001, 39, 321–329. [Google Scholar] [CrossRef]
- Lombardo, P.; Sciotti, M.; Pellizzeri, T.M.; Meloni, M. Optimum model-based segmentation techniques for multifrequency polarimetric SAR images of urban areas. IEEE Trans. Geosci. Remote Sens. 2003, 41, 1959–1975. [Google Scholar] [CrossRef]
- Beaulieu, J.; Touzi, R. Segmentation of textured polarimetric SAR scenes by likelihood approximation. IEEE Trans. Geosci. Remote Sens. 2004, 42, 2063–2072. [Google Scholar] [CrossRef]
- Ayed, I.B.; Mitiche, A.; Belhadj, Z. Polarimetric image segmentation via maximum-likelihood approximation and efficient multiphase level-sets. IEEE Trans. Pattern Anal. Mach. Intell. 2006, 28, 1493–1500. [Google Scholar] [CrossRef] [PubMed]
- Wu, Y.; Ji, K.; Yu, W.; Su, Y. Region-Based Classification of Polarimetric SAR Images Using Wishart MRF. IEEE Geosci. Remote Sens. Lett. 2008, 5, 668–672. [Google Scholar] [CrossRef]
- Ersahin, K.; Cumming, I.G.; Ward, R.K. Segmentation and Classification of Polarimetric SAR Data Using Spectral Graph Partitioning. IEEE Trans. Geosci. Remote Sens. 2010, 48, 164–174. [Google Scholar] [CrossRef] [Green Version]
- Yu, P.; Qin, A.K.; Clausi, D.A. Unsupervised Polarimetric SAR Image Segmentation and Classification Using Region Growing with Edge Penalty. IEEE Trans. Geosci. Remote Sens. 2012, 50, 1302–1317. [Google Scholar] [CrossRef]
- Lang, F.K.; Yang, J.; Li, D.R.; Zhao, L.L.; Shi, L. Polarimetric SAR Image Segmentation Using Statistical Region Merging. IEEE Geosci. Remote Sens. Lett. 2014, 11, 509–513. [Google Scholar] [CrossRef]
- Qin, F.C.; Guo, J.M.; Lang, F.K. Superpixel Segmentation for Polarimetric SAR Imagery Using Local Iterative Clustering. IEEE Geosci. Remote Sens. Lett. 2015, 12, 13–17. [Google Scholar]
- Song, W.Y.; Li, M.; Zhang, P.; Wu, Y.; Jia, L.; An, L. Unsupervised PolSAR Image Classification and Segmentation Using Dirichlet Process Mixture Model and Markov Random Fields with Similarity Measure. IEEE J. Sel. Top. Appl. Earth Obs. Remote Sens. 2017, 10, 3556–3568. [Google Scholar] [CrossRef]
- Lee, J.S.; Pottier, E. Polarimetric Radar Imaging: From Basics to Applications; CRS Press: Boca Raton, FL, USA, 2009. [Google Scholar]
- Den Bos, A.V. The multivariate complex normal distribution-a generalization. IEEE Trans. Inf. Theory 1995, 41, 537–539. [Google Scholar] [CrossRef] [Green Version]
- Goodman, N.R. Statistical Analysis Based on a Certain Multivariate Complex Gaussian Distribution (An Introduction). Ann. Math. Stat. 1963, 34, 152–177. [Google Scholar] [CrossRef]
- Lee, J.S.; Grunes, M.R.; Kwok, R. Classification of multi-look polarimetric SAR imagery based on complex Wishart distribution. Int. J. Remote Sens. 1994, 15, 2299–2311. [Google Scholar] [CrossRef]
- Anfinsen, S.N.; Doulgeris, A.P.; Eltoft, T. Goodness-of-Fit Tests for Multilook Polarimetric Radar Data Based on the Mellin Transform. IEEE Trans. Geosci. Remote Sens. 2011, 49, 2764–2781. [Google Scholar] [CrossRef]
- Yi, H.G.; Yang, J.; Li, P.X.; Shi, L.; Sun, W.D. Scattering model based segmentation of polarimetric SAR images. In Proceedings of the 2017 IEEE International Geoscience and Remote Sensing Symposium (IGARSS 2017), Fort Worth, TX, USA, 23–28 July 2017; Volume 4, pp. 791–794. [Google Scholar]
- Akbari, V.; Anfinsen, S.N.; Doulgeris, A.P.; Eltoft, T. The Hotelling-Lawley trace statistic for change detection in polarimetric SAR data under the complex Wishart distribution. In Proceedings of the IEEE International Geoscience and Remote Sensing Symposium (IGARSS), Melbourne, Australia, 21–26 July 2013; pp. 4162–4165. [Google Scholar]
- Lee, J.S.; Grunes, M.R.; Schuler, D.L.; Pottier, E.; Ferrofamil, L. Scattering-model-based speckle filtering of polarimetric SAR data. IEEE Trans. Geosci. Remote Sens. 2006, 44, 176–187. [Google Scholar]
- Bhattacharya, A.; Muhuri, A.; De, S.; Manickam, S.; Frery, A.C. Modifying the Yamaguchi Four-Component Decomposition Scattering Powers Using a Stochastic Distance. IEEE J. Sel. Top. Appl. Earth Obs. Remote Sens. 2015, 8, 3497–3506. [Google Scholar] [CrossRef]
- Zhang, Y.; Zou, H.X.; Luo, T.C.; Qin, X.X.; Zhou, S.L.; Ji, K.F. A Fast Superpixel Segmentation Algorithm for PolSAR Images Based on Edge Refinement and Revised Wishart Distance. Sensors 2016, 16, E1687. [Google Scholar] [CrossRef] [PubMed]
- Yi, H.G.; Yang, J.; Li, P.X.; Shi, L.; Sun, W.D.; Zhao, J.Q.; Liu, J. A PolSAR Image Speckle Filtering Method Preserving Point Targets and Dominant Scattering Mechanisms. Int. J. Remote Sens. 2018, 16. [Google Scholar] [CrossRef]
- Yamaguchi, Y.; Moriyama, T.; Ishido, M.; Yamada, H. Four-component scattering model for polarimetric SAR image decomposition. IEEE Trans. Geosci. Remote Sens. 2005, 43, 1699–1706. [Google Scholar] [CrossRef]
- Conradsen, K.; Nielsen, A.A.; Schou, J.; Skriver, H. A test statistic in the complex Wishart distribution and its application to change detection in polarimetric SAR data. IEEE Trans. Geosci. Remote Sens. 2003, 41, 4–19. [Google Scholar] [CrossRef]
- Comaniciu, D.; Meer, P. Mean Shift: A Robust Approach toward Feature Space Analysis. IEEE Trans. Pattern Anal. Mach. Intell. 2002, 24, 603–619. [Google Scholar] [CrossRef]
- Lang, F.K.; Yang, J.; Wu, L.X.; Xu, J.Y. Superpixel segmentation of Polarimetric SAR image using generalized mean shift. In Proceedings of the 2016 IEEE International Geoscience and Remote Sensing Symposium (IGARSS 2016), Beijing, China, 10–15 July 2016; Volume 4, pp. 6324–6327. [Google Scholar]
- Kersten, P.R.; Lee, J.S.; Ainsworth, T.L. Unsupervised classification of polarimetric synthetic aperture Radar images using fuzzy clustering and EM clustering. IEEE Trans. Geosci. Remote Sens. 2005, 43, 519–527. [Google Scholar] [CrossRef]
- Arbelaez, P.; Maire, M.; Fowlkes, C.; Malik, J. Contour detection and hierarchical image segmentation. IEEE Trans. Pattern Anal. Mach. Intell. 2011, 33, 898–916. [Google Scholar] [CrossRef] [PubMed]
- Liu, M.Y.; Tuzel, O.; Ramalingam, S.; Chellappa, R. Entropy rate superpixel segmentation. In Proceedings of the 2011 IEEE Conference on Computer Vision and Pattern Recognition (CVPR), Colorado Springs, CO, USA, 20–25 June 2011; pp. 2097–2104. [Google Scholar]

















{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| MS | GMS | GSRM | Proposed Method | |
|---|---|---|---|---|
| BR | 0.5441 | 0.5557 | 0.5421 | 0.5871 |
| MS | GMS | GSRM | Proposed Method | |
|---|---|---|---|---|
| BR | 0.4952 | 0.5573 | 0.5472 | 0.5722 |
| MS | GMS | GSRM | Proposed Method | |
|---|---|---|---|---|
| BR | 0.4290 | 0.4532 | 0.5298 | 0.5341 |
© 2018 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Yi, H.; Yang, J.; Li, P.; Shi, L.; Lang, F. A PolSAR Image Segmentation Algorithm Based on Scattering Characteristics and the Revised Wishart Distance. Sensors 2018, 18, 2262. https://doi.org/10.3390/s18072262
Yi H, Yang J, Li P, Shi L, Lang F. A PolSAR Image Segmentation Algorithm Based on Scattering Characteristics and the Revised Wishart Distance. Sensors. 2018; 18(7):2262. https://doi.org/10.3390/s18072262
Chicago/Turabian StyleYi, Huiguo, Jie Yang, Pingxiang Li, Lei Shi, and Fengkai Lang. 2018. "A PolSAR Image Segmentation Algorithm Based on Scattering Characteristics and the Revised Wishart Distance" Sensors 18, no. 7: 2262. https://doi.org/10.3390/s18072262
APA StyleYi, H., Yang, J., Li, P., Shi, L., & Lang, F. (2018). A PolSAR Image Segmentation Algorithm Based on Scattering Characteristics and the Revised Wishart Distance. Sensors, 18(7), 2262. https://doi.org/10.3390/s18072262