A Maximum Likelihood Based Nonparametric Iterative Adaptive Method of Synthetic Aperture Radar Tomography and Its Application for Estimating Underlying Topography and Forest Height


Abstract
:1. Introduction
2. Methodology
2.1. Overview of the TomoSAR Imaging Model
2.2. IAA-ML TomoSAR Method
3. Numerical Simulated Experiments
- (1)
- We investigated the reconstruction performance of IAA-APES and IAA-ML for two sets of simulated signals with different baseline distributions.
- (2)
- The reconstruction performance between IAA-APES and IAA-ML was then investigated for the two sets of simulated signals with different power ratios of ground to canopy.
- (3)
- The resolution capability of IAA-ML was investigated in terms of detecting the two phase centers.
- (1)
- For the two sets of simulated signals, IAA-ML has much narrower main lobes than IAA-APES for all cases and it is aimed at estimating the backscattered power around the phase centers.
- (2)
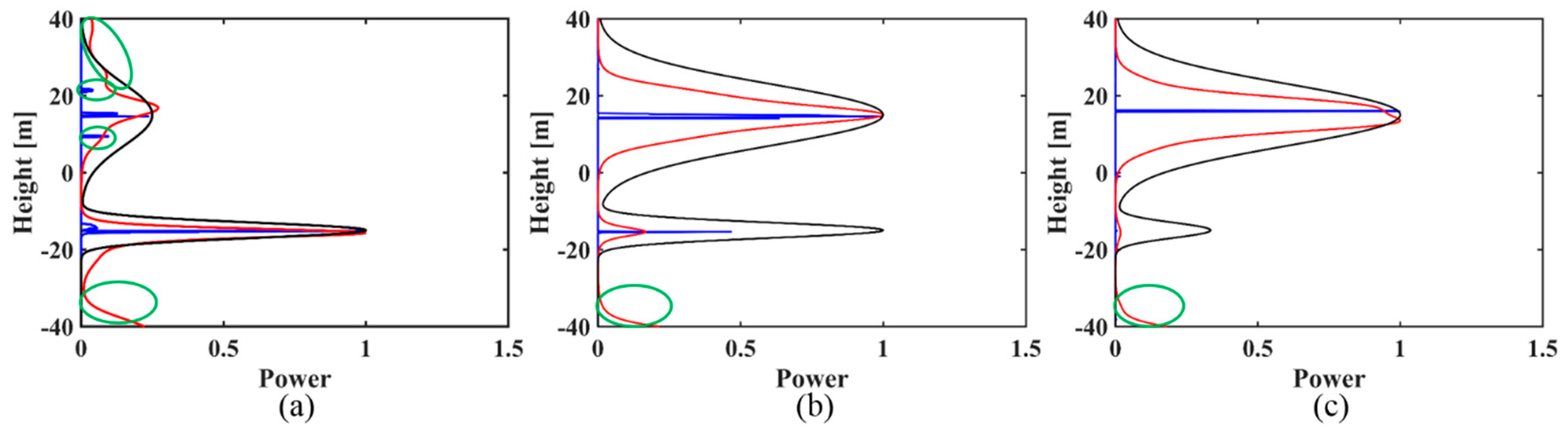
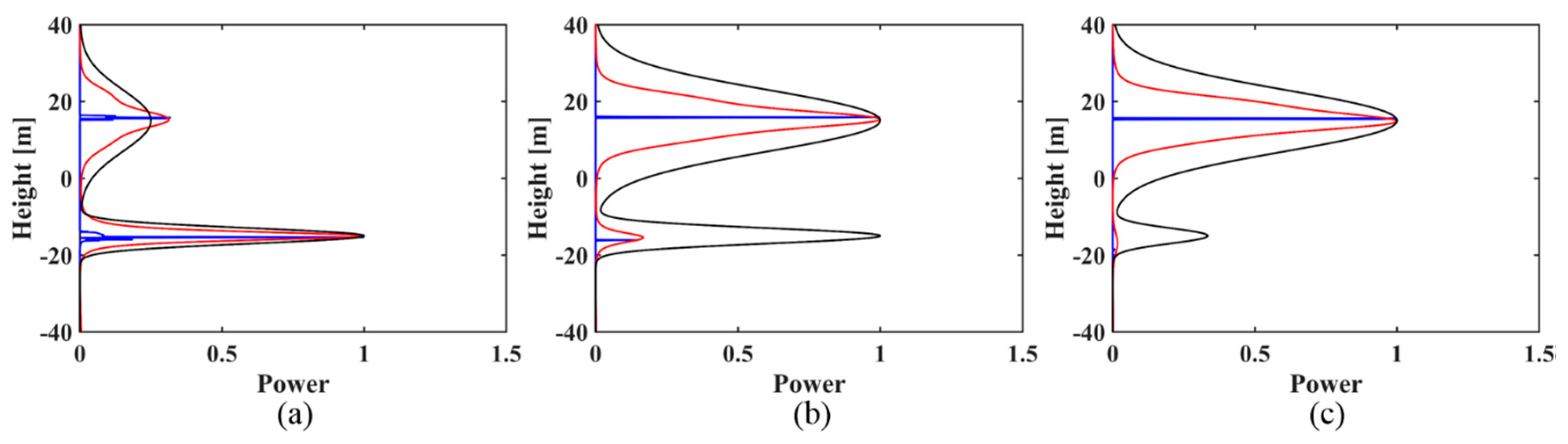
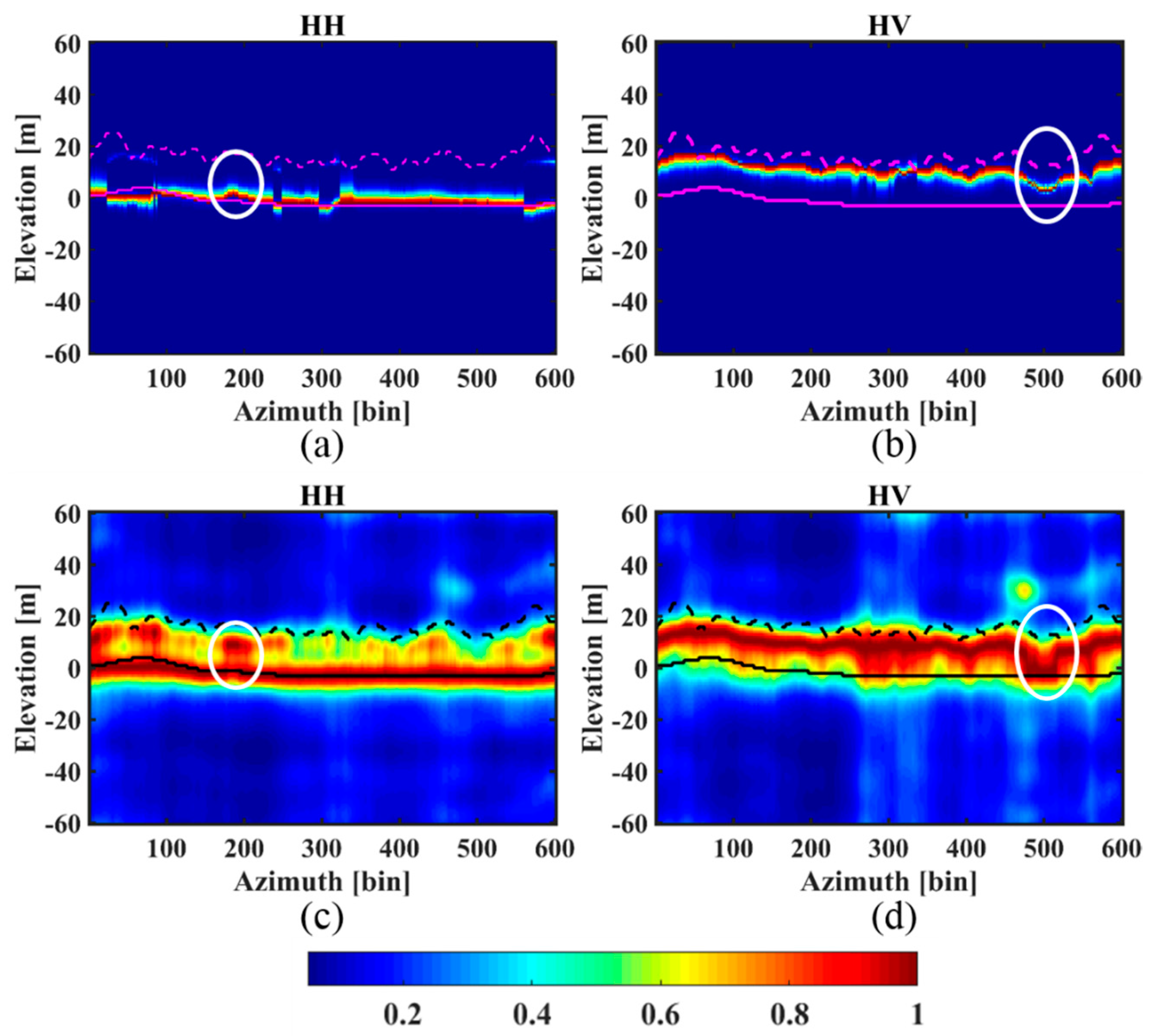
- For the simulated signal with two backscattering phase centers of 15 m and −15 m in the case of uniformly distributed baselines (as shown in Figure 1), when the ground contribution does dominate, that is, t > 1, then both the IAA-APES and IAA-ML estimators can successfully obtain the canopy and ground phase center information, including the location and power estimation, although some sidelobes exist (green circles in Figure 1). When the canopy power increases to the same level as the ground power (t = 1), the two methods can accurately reconstruct the canopy phase center information but show a degraded performance in detecting the ground contribution as the amplitude estimate deviates greatly from the true value, especially the result of IAA-APES (Figure 1b). When the canopy contribution dominates (t < 1), the two estimators can only retrieve the canopy phase center information and fail to recognize the ground scattering phase center (Figure 1c). As for the non-uniformly distributed baselines (see Figure 2), the two estimators show a similar reconstruction performance to the uniform case but with fewer sidelobes.
- (3)
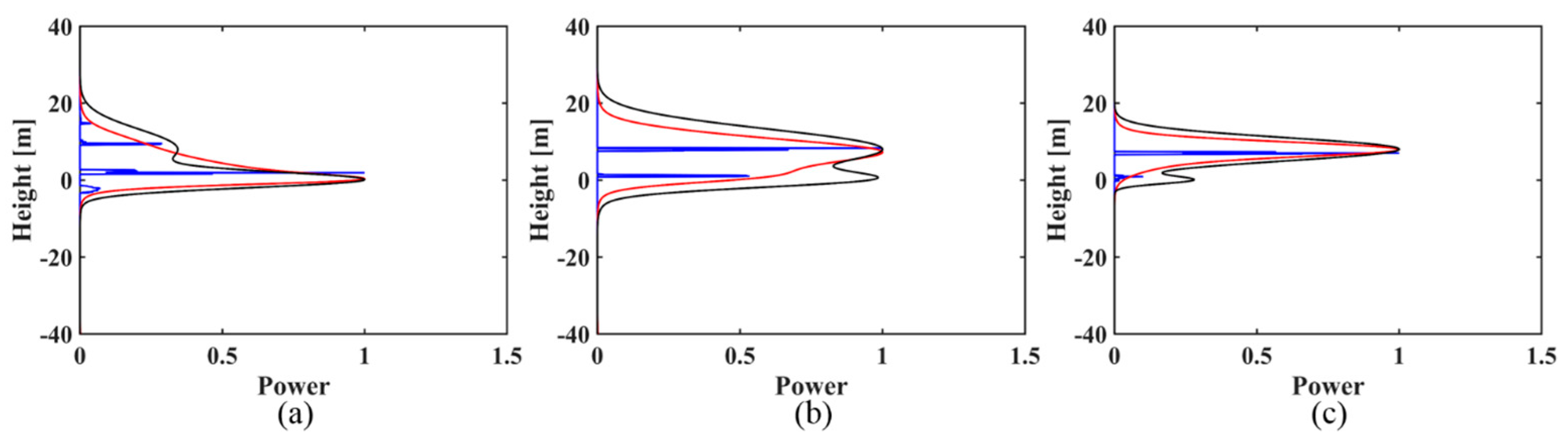
- For the simulated signal with two backscattering phase centers of 0 m and 8 m, in both the case of the uniformly distributed baselines and in the case of the non-uniformly distributed baselines, the IAA-ML estimator can successfully discriminate the canopy and ground phase centers under three kinds of ground to canopy power ratios (as shown in Figure 3 and Figure 4), although there is some bias for the height and amplitude estimation. However, IAA-APES can only detect the canopy scattering phase center and it fails to recognize the ground scattering phase center in these cases. When the canopy contribution dominates (t < 1), the IAA-ML method shows a decreased detection capability for the ground phase center (Figure 3c and Figure 4c).
- (4)
- From Figure 5, IAA-ML can detect the two phase centers, even for a location difference of only 5 m (with a detection rate of over 90%).
4. Real-Data Experiments and Results
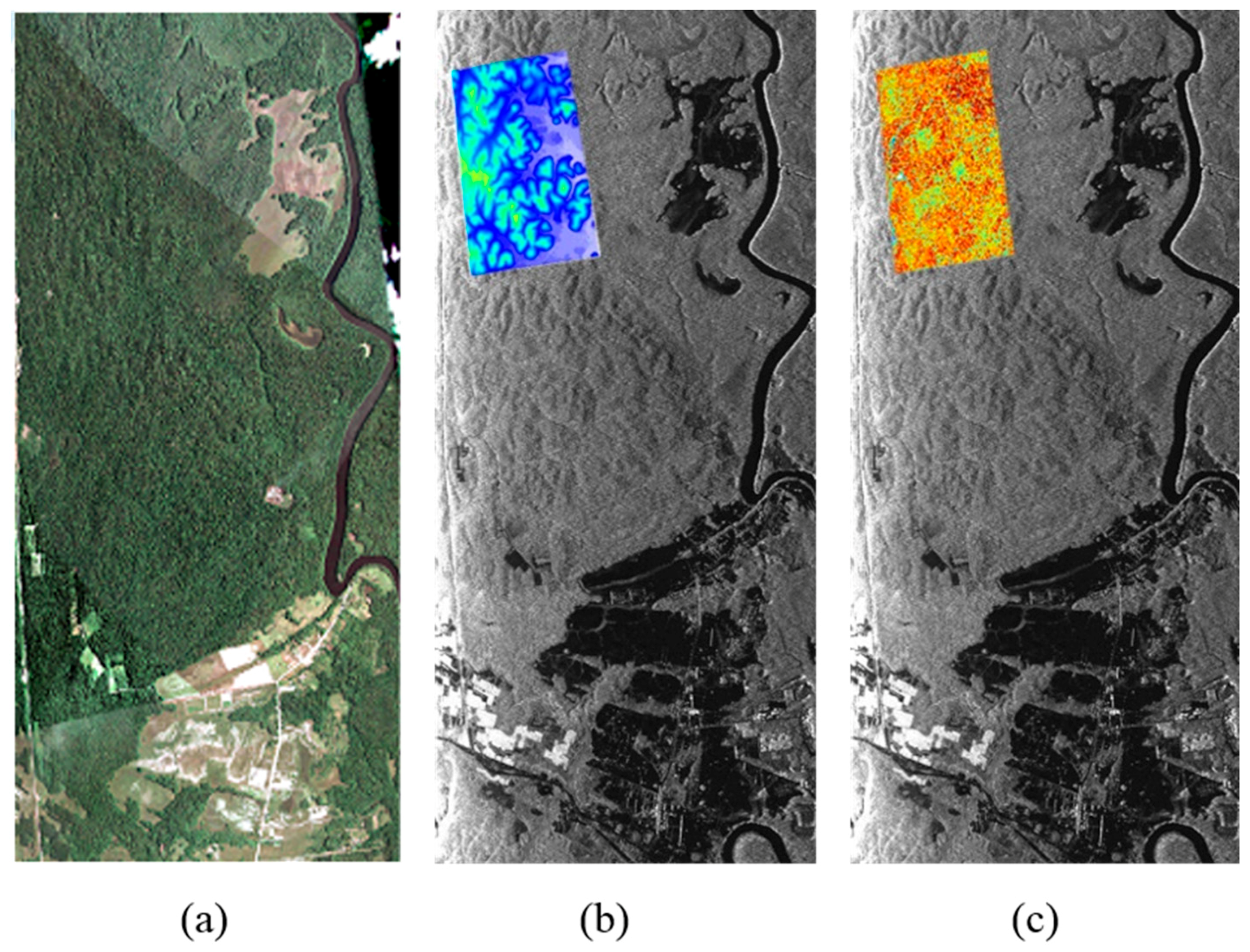
4.1. Study Area and Dataset
4.2. Results and Analysis
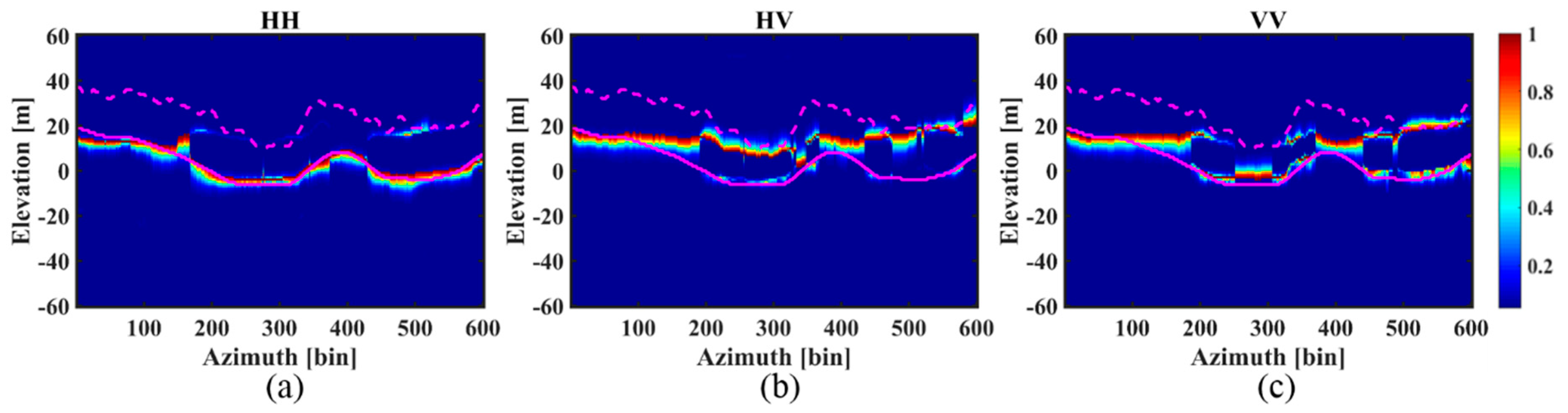
4.2.1. Tomograms of the Selected Azimuth Profiles
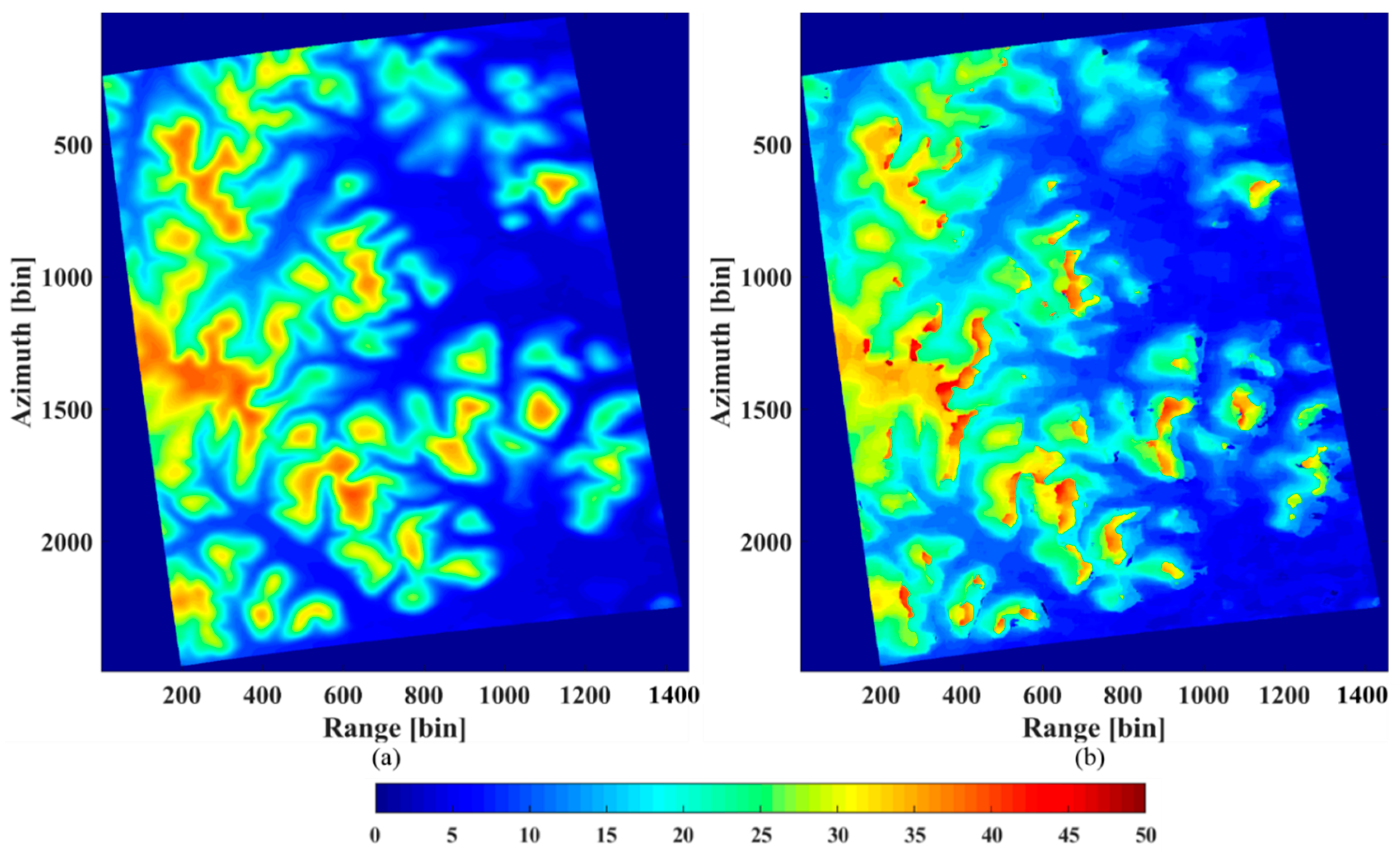
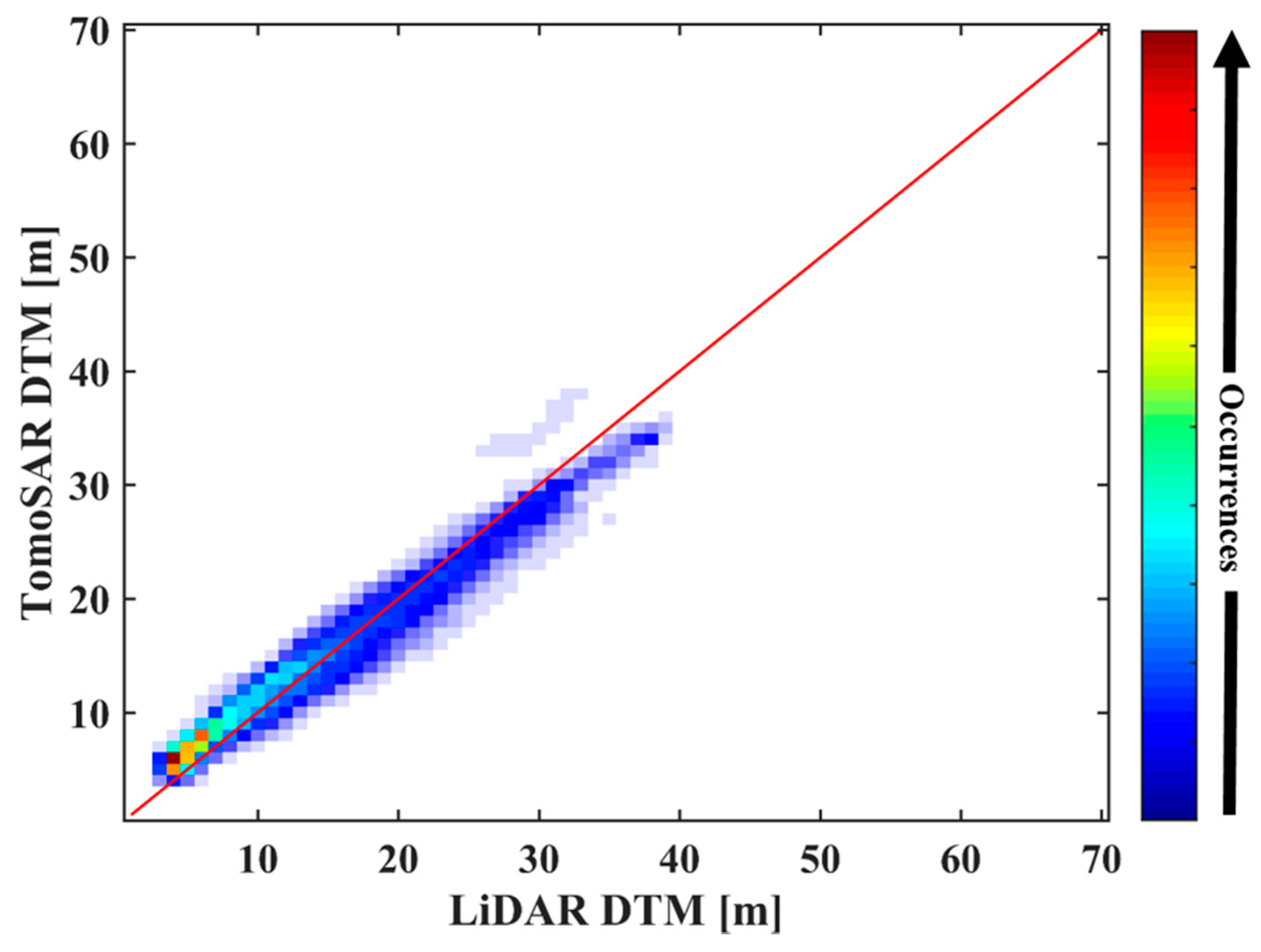
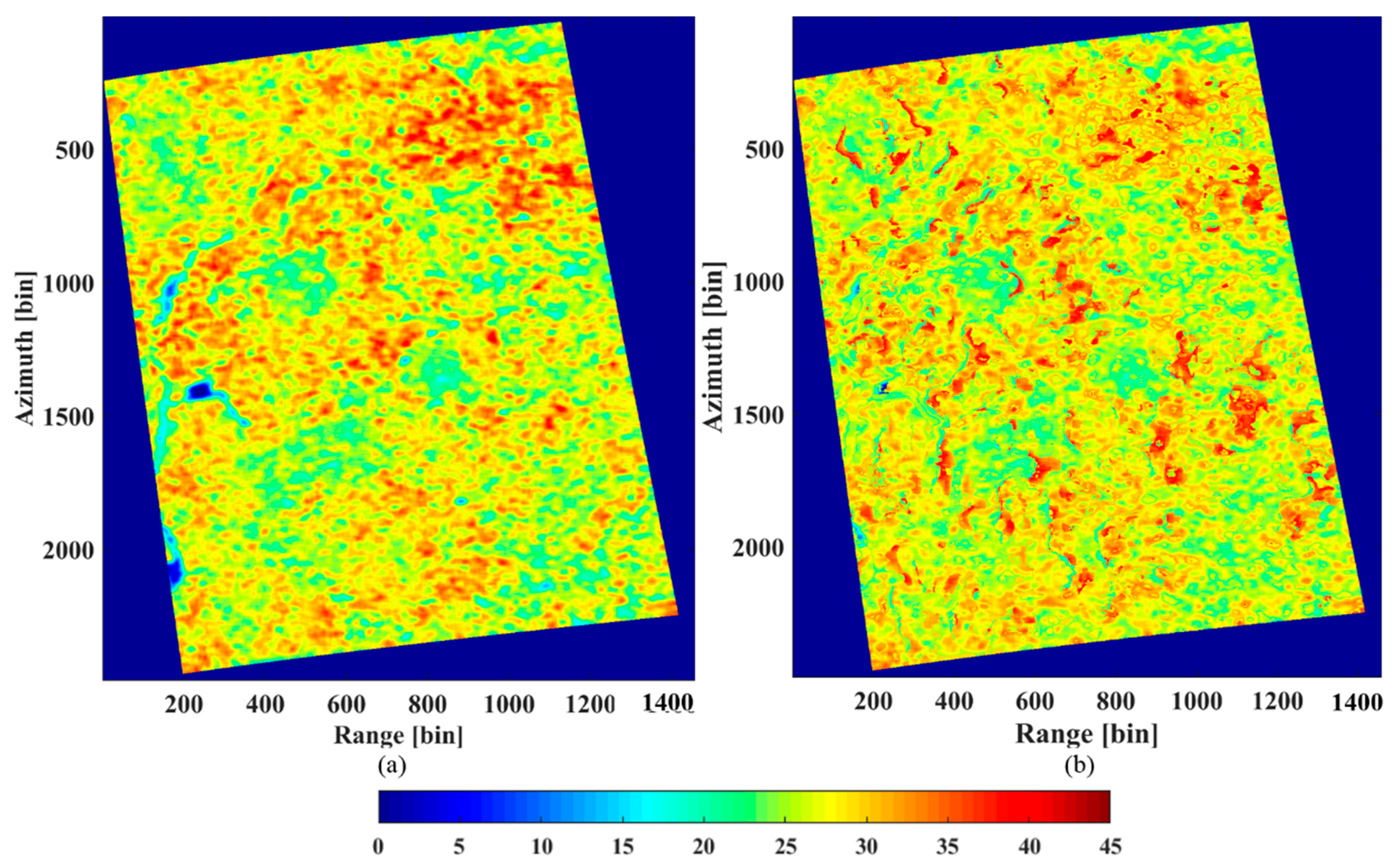
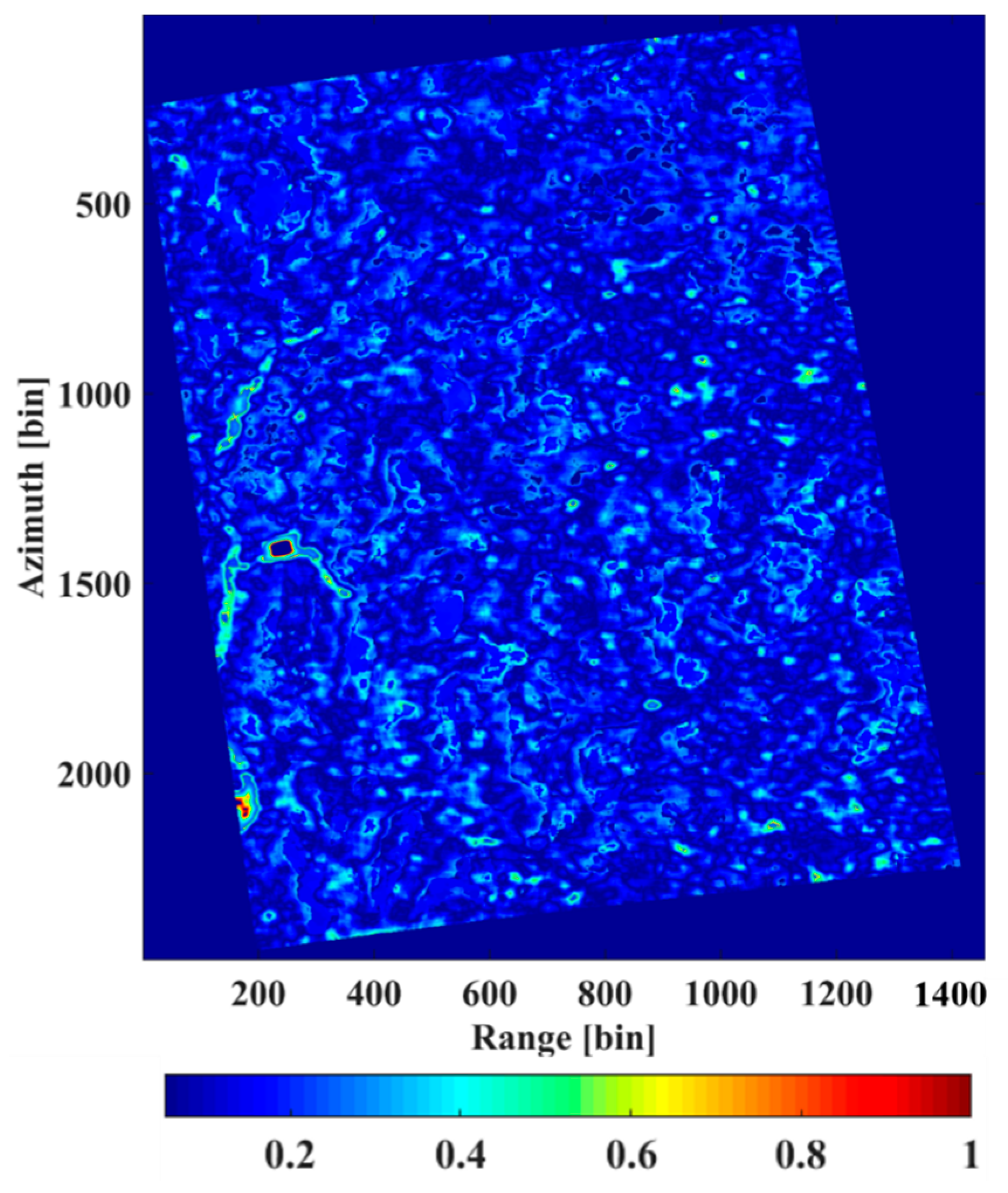
4.2.2. Underlying Topography Estimation
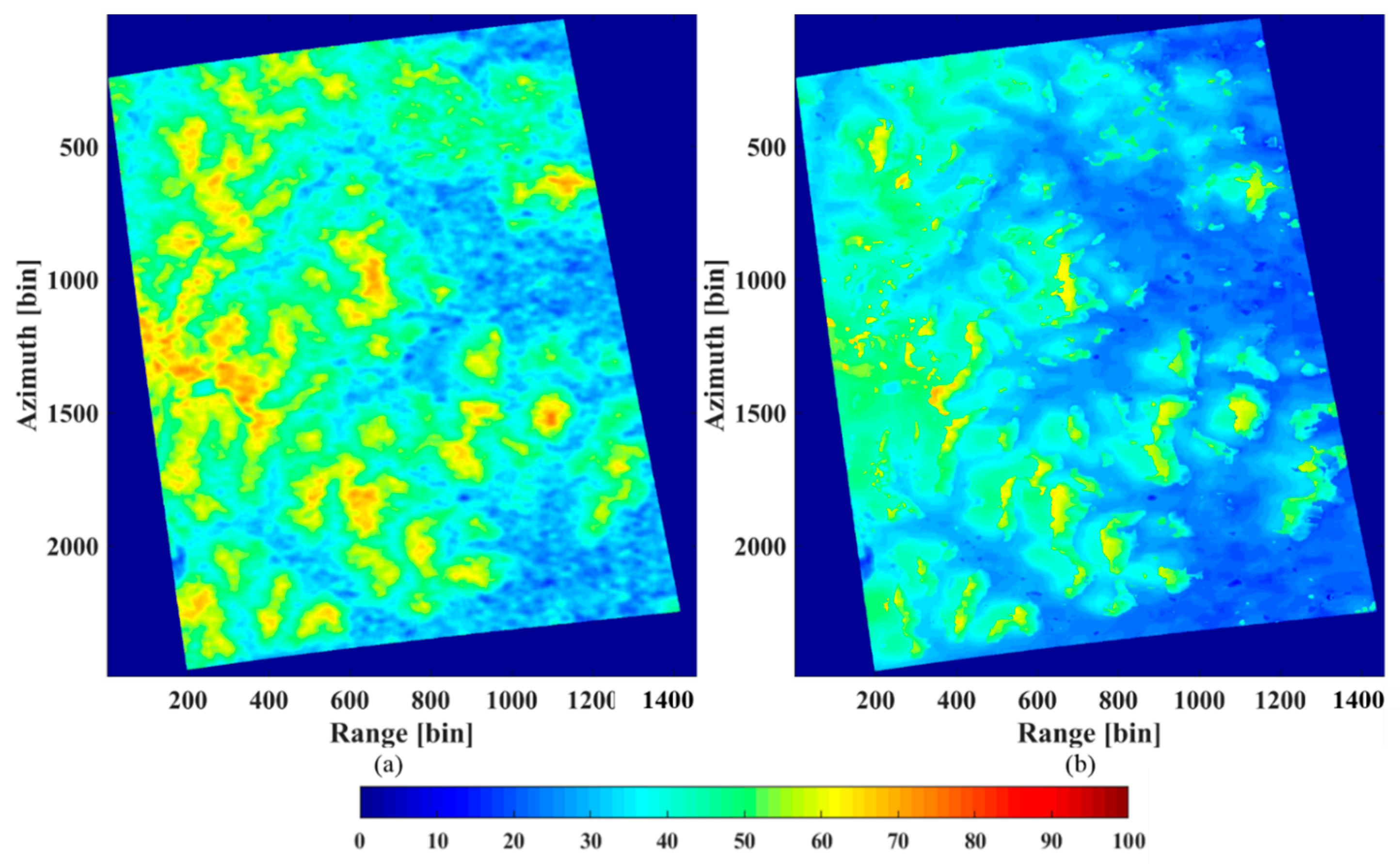
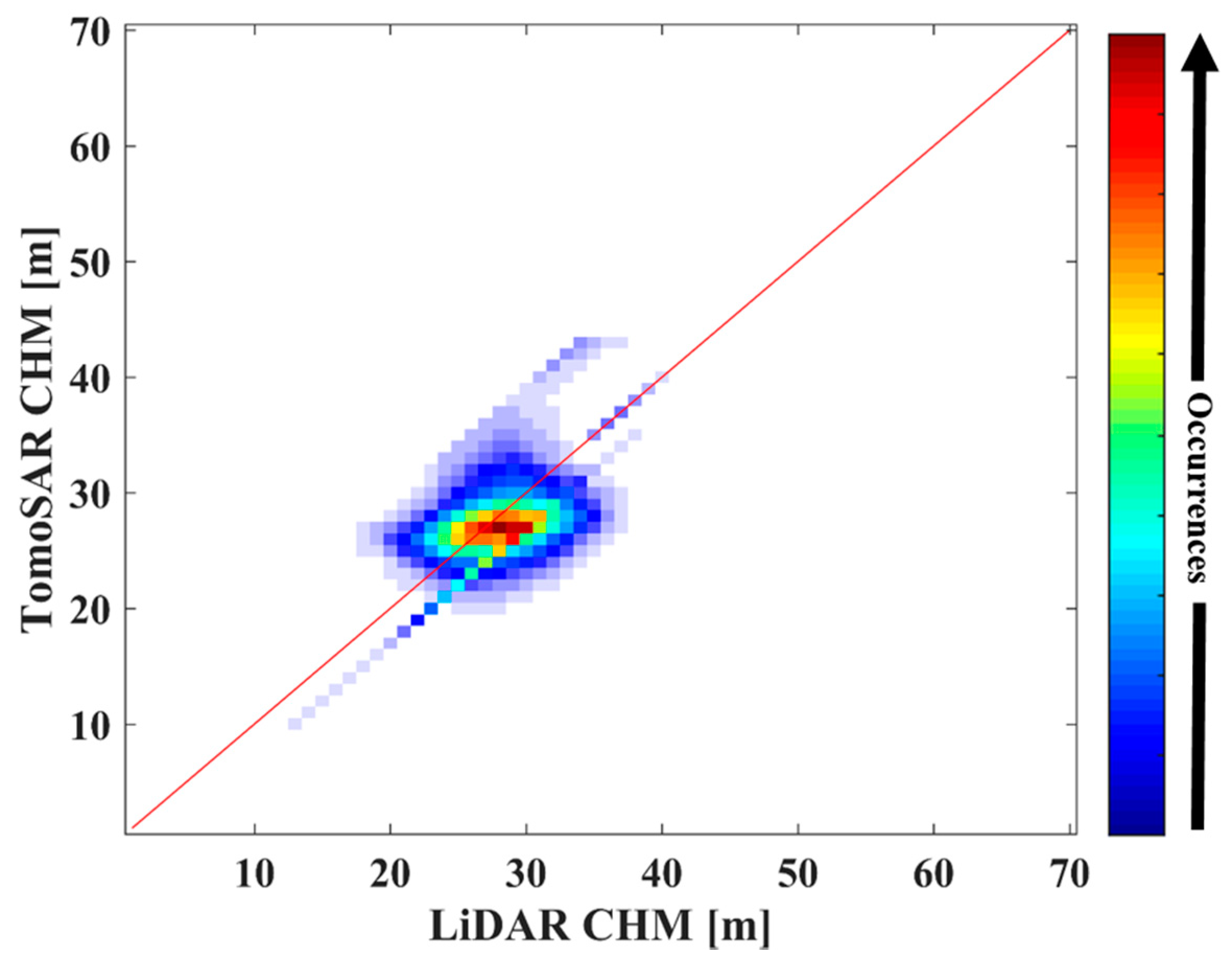
4.2.3. Forest Height Estimation
5. Discussion
6. Conclusions
Author Contributions
Funding
Acknowledgments
Conflicts of Interest
References
- Minh, D.H.T.; Le Toan, T.; Rocca, F.; Tebaldini, S.; d’Alessandro, M.M.; Villard, L. Relating P-Band Synthetic Aperture Radar Tomography to Tropical Forest Biomass. IEEE Trans. Geosci. Remote Sens. 2014, 52, 967–979. [Google Scholar] [CrossRef]
- Minh, D.H.T.; Le Toan, T.; Rocca, F. SAR Tomography for the Retrieval of Forest Biomass and Height: Cross-validation at Two Tropical Forest Sites in French Guiana. Remote Sens. Environ. 2016, 175, 138–147. [Google Scholar] [CrossRef] [Green Version]
- Zhang, H.; Wang, C.; Zhu, J.; Fu, H.; Xie, Q.; Shen, P. Forest Above-Ground Biomass Estimation Using Single-Baseline Polarization Coherence Tomography with P-Band PolInSAR Data. Forests 2018, 9, 163. [Google Scholar] [CrossRef]
- Minh, D.H.T.; Tebaldini, S.; Rocca, F.; Le Toan, T.; Villard, L.; Dubois-Fernandez, P.C. Capabilities of BIOMASS Tomography for Investigating Tropical Forests. IEEE Trans. Geosci. Remote Sens. 2015, 53, 965–975. [Google Scholar] [CrossRef]
- Pasquali, P.; Prati, C.; Rocca, F. A 3-D SAR Experiment with EMSL Data. In Proceedings of the 1995 International Geoscience and Remote Sensing Symposium (IGARSS 95), Florence, Italy, 10–14 July 1995; Volume 1, pp. 784–786. [Google Scholar]
- Reigber, A.; Moreira, A. First Demonstration of Airborne SAR Tomography Using Multibaseline L-band Data. IEEE Trans. Geosci. Remote Sens. 2000, 38, 2142–2152. [Google Scholar] [CrossRef]
- Zhu, X.X.; Bamler, R. Super-Resolution Power and Robustness of Compressive Sensing for Spectral Estimation with Application to Spaceborne Tomographic SAR. IEEE Trans. Geosci. Remote Sens. 2012, 50, 247–258. [Google Scholar] [CrossRef]
- Liang, L.; Guo, H.; Li, X. Three-Dimensional Structural Parameter Inversion of Buildings by Distributed Compressive Sensing-Based Polarimetric SAR Tomography Using a Small Number of Baselines. IEEE J. Sel. Top. Appl. Res. Obs. Remote Sens. 2014, 7, 4218–4230. [Google Scholar] [CrossRef]
- Aguilera, E.; Nannini, M.; Reigber, A. Wavelet-Based Compressed Sensing for SAR Tomography of Forested Areas. IEEE Trans. Geosci. Remote Sens. 2013, 51, 5283–5295. [Google Scholar] [CrossRef] [Green Version]
- Aguilera, E.; Nannini, M. Reigber Wavelet-Based Compressed Sensing for SAR Tomography of Forested Areas. IEEE Trans. Geosci. Remote Sens. 2013, 51, 5283–5295. [Google Scholar] [CrossRef] [Green Version]
- Huang, Y.; Levy-Vehel, J.; Ferro-Famil, L.; Reigber, A. Three-Dimensional Imaging of Objects Concealed below a Forest Canopy Using SAR Tomography at L-band and Wavelet-Based Sparse Estimation. IEEE Geosci. Remote Sens. Lett. 2017, 14, 1454–1458. [Google Scholar] [CrossRef]
- Cazcarra-Bes, V.; Tello-Alonso, M.; Fischer, R.; Heym, M.; Papathanassiou, K. Monitoring of Forest Structure Dynamics by means of L-band SAR Tomography. Remote Sens. 2017, 9, 1229. [Google Scholar] [CrossRef]
- Tebaldini, S. Algebraic synthesis of forest scenarios from multibaseline PolInSAR data. IEEE Trans. Geosci. Remote Sens. 2009, 47, 4132–4142. [Google Scholar] [CrossRef]
- Li, X.W.; Liang, L.; Guo, H. Compressive Sensing for Multibaseline Polarimetric SAR Tomography of Forested Areas. IEEE Trans. Geosci. Remote Sens. 2016, 54, 153–166. [Google Scholar] [CrossRef]
- Gini, F.; Lombardini, F. Multibaseline cross-track SAR Interferometry: A signal processing perspective. IEEE Aerosp. Electron. Syst. Mag. 2005, 20, 71–93. [Google Scholar] [CrossRef]
- Sauer, S.; Ferro-Famil, L.; Reigber, A.; Pottier, E. Three-dimensional imaging and scattering mechanism estimation over urban scenes using dual-baseline polarimetric InSAR observations at L-band. IEEE Trans. Geosci. Remote Sens. 2011, 49, 4616–4629. [Google Scholar] [CrossRef] [Green Version]
- Huang, Y.; Ferro-Famil, L.; Reigber, A. Under-foliage Object Imaging Using SAR Tomography and Polarimetric Spectral Estimators. IEEE Trans. Geosci. Remote Sens. 2012, 50, 2213–2225. [Google Scholar] [CrossRef]
- Zhu, X.; Bamler, R. Very High Resolution Spaceborne SAR Tomography in Urban Environment. IEEE Trans. Geosci. Remote Sens. 2010, 48, 4296–4308. [Google Scholar] [CrossRef] [Green Version]
- Fornaro, G.; Serafino, F.; Soldovieri, F. Three-dimensional Focusing with Multi-pass SAR Data. IEEE Trans. Geosci. Remote Sens. 2003, 41, 507–517. [Google Scholar] [CrossRef]
- Lombardini, F.; Reigber, A. Adaptive Spectral Estimation for Multi-baseline SAR Tomography with Airborne L-band Data. Int. Geosci. Remote Sens. Symp. 2003, 3, 2014–2016. [Google Scholar]
- Tebaldini, S. Single and Multi-polarimetric SAR Tomography of Forested Areas: A Parametric Approach. IEEE Trans. Geosci. Remote Sens. 2010, 48, 2375–2387. [Google Scholar] [CrossRef]
- Tebaldini, S.; Rocca, F. Multibaseline Polarimetric SAR Tomography of a Boreal Forest at P- and L-Bands. IEEE Trans. Geosci. Remote Sens. 2012, 50, 232–246. [Google Scholar] [CrossRef]
- Pardini, M.; Papathanassiou, K. On the Estimation of Ground and Volume Polarimetric Covariances in Forest Scenarios with SAR Tomography. IEEE Geosci. Remote Sens. Lett. 2017, 14, 1860–1864. [Google Scholar] [CrossRef]
- Gini, F.; Lombardini, F.; Montanari, M. Layover Solution in Multi-baseline SAR interferometry. IEEE Trans. Aerosp. Electron. Syst. 2001, 38, 1344–1356. [Google Scholar] [CrossRef]
- Kumar, S.; Joshi, S.K.; Govil, H. Spaceborne PolSAR Tomography for Forest Height Retrieval. IEEE J. Sel. Top. Appl. Earth Obs. Remote Sens. 2017, 10, 5175–5185. [Google Scholar] [CrossRef]
- Nannini, M.; Scheiber, R.; Horn, R.; Moreira, A. First 3-D reconstructions of targets hidden beneath foliage by means of polarimetric SAR tomography. IEEE Geosci Remote Sens Lett. 2012, 9, 60–64. [Google Scholar] [CrossRef] [Green Version]
- Aghabaee, H.; Sahebi, M.R. Model-based Target Scattering Decomposition of Polarimetric SAR Tomography. IEEE Trans. Geosci. Remote Sens. 2018, 56, 972–983. [Google Scholar] [CrossRef]
- Del Campo, G.D.M.; Reigber, A.; Shkvarko, Y.V. Resolution enhanced SAR tomography: A Nonparametric Iterative Adaptive Approach. In Proceedings of the International Geoscience and Remote Sensing Symposium (IGARSS), Beijing, China, 10–15 July 2016; pp. 3238–3241. [Google Scholar]
- Yardibi, T.; Li, J.; Stoica, P.; Xue, M.; Baggeroer, A.B. Source Localization and Sensing: A Nonparametric Iterative Adaptive Approach Based on Weighted Least Squares. IEEE Trans. Aerosp. Electron. Syst. 2010, 46, 425–443. [Google Scholar] [CrossRef]
- Yardibi, T.; Li, J.; Stoica, P. Nonparametric and Sparse Signal Representations in Array Processing via Iterative Adaptive Approaches. In Proceedings of the 42nd Asilomar Conference on Signals, Systems and Computers, Pacific Grove, CA, USA, 26–29 October 2008. [Google Scholar] [CrossRef]
- Yang, Z.; Li, X.; Wang, H.; Jiang, W. Adaptive clutter suppression based on iterative adaptive approach for airborne radar. Signal Process. 2013, 93, 3567–3577. [Google Scholar] [CrossRef]
- Li, J.; Stoica, P. An adaptive filtering approach to spectral estimation and SAR imaging. IEEE Trans. Signal Process. 1996, 44, 1469–1484. [Google Scholar]
- Stoica, P.; Sharman, K. Maximum likelihood methods for direction of arrival estimation. IEEE Trans. Acoust. Speech Signal Process. 1990, 38, 1132–1143. [Google Scholar] [CrossRef]
- Dubois-Fernandez, P.C.; Le Toan, T.; Daniel, S.; Oriot, H.; Chave, J.; Blanc, L.; Petit, M. The TropiSAR airborne campaign in French Guiana: Objectives, description and observed temporal behavior of the backscatter signal. IEEE Trans. Geosci. Remote Sens. 2012, 50, 3228–3241. [Google Scholar] [CrossRef]
- Dubois-Fernandez, P.; TropiSAR Team. Technical Assistance for the Development of Airborne SAR and Geophysical Measurements during the TropiSAR 2009 Experiment; Final Report; ESA Earth Online: Paracou, French Guiana, 2011. [Google Scholar]







{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Initialization |
| Iteration |
| repeat |
| 1. Adjust such that |
| 2. |
| 3. 4. |
| Until(convergence) |
| Wavelength Polarimetric Channel | 0.7542 m (P-Band) HH + HV + VV |
| Center slant range | 4905 m |
| Center incidence angle | 35.0614° |
| Range resolution | 1.0 m |
| Azimuth resolution | 1.245 m |
| Identifier | Acquisition Date | Baseline (m) |
|---|---|---|
| Tropi0402 | 24 August 2009 | 0 |
| Tropi0403 | −14.4879 | |
| Tropi0404 | −30.1163 | |
| Tropi0405 | −43.8343 | |
| Tropi0406 | −60.0632 | |
| Tropi0407 | −74.9683 |
| TomoSAR w.r.t LiDAR | Mean | Std. |
|---|---|---|
| Ground (m) | 1.76 | 2.11 |
| TomoSAR w.r.t LiDAR | Mean | Std. |
|---|---|---|
| Forest height (m) | 2.10 | 2.80 |
| TomoSAR w.r.t LiDAR | Std. | |
|---|---|---|
| IAA-APES | Ground (m) | 2.57 |
| Forest height (m) | 3.29 | |
| SKP-beamforming | Ground (m) | 2.41 |
| Forest height (m) | 3.00 |
© 2018 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Peng, X.; Li, X.; Wang, C.; Fu, H.; Du, Y. A Maximum Likelihood Based Nonparametric Iterative Adaptive Method of Synthetic Aperture Radar Tomography and Its Application for Estimating Underlying Topography and Forest Height. Sensors 2018, 18, 2459. https://doi.org/10.3390/s18082459
Peng X, Li X, Wang C, Fu H, Du Y. A Maximum Likelihood Based Nonparametric Iterative Adaptive Method of Synthetic Aperture Radar Tomography and Its Application for Estimating Underlying Topography and Forest Height. Sensors. 2018; 18(8):2459. https://doi.org/10.3390/s18082459
Chicago/Turabian StylePeng, Xing, Xinwu Li, Changcheng Wang, Haiqiang Fu, and Yanan Du. 2018. "A Maximum Likelihood Based Nonparametric Iterative Adaptive Method of Synthetic Aperture Radar Tomography and Its Application for Estimating Underlying Topography and Forest Height" Sensors 18, no. 8: 2459. https://doi.org/10.3390/s18082459