General Signal Model for Multiple-Input Multiple-Output GMTI Radar

Abstract
:1. Introduction
2. Proposed General Signal Model
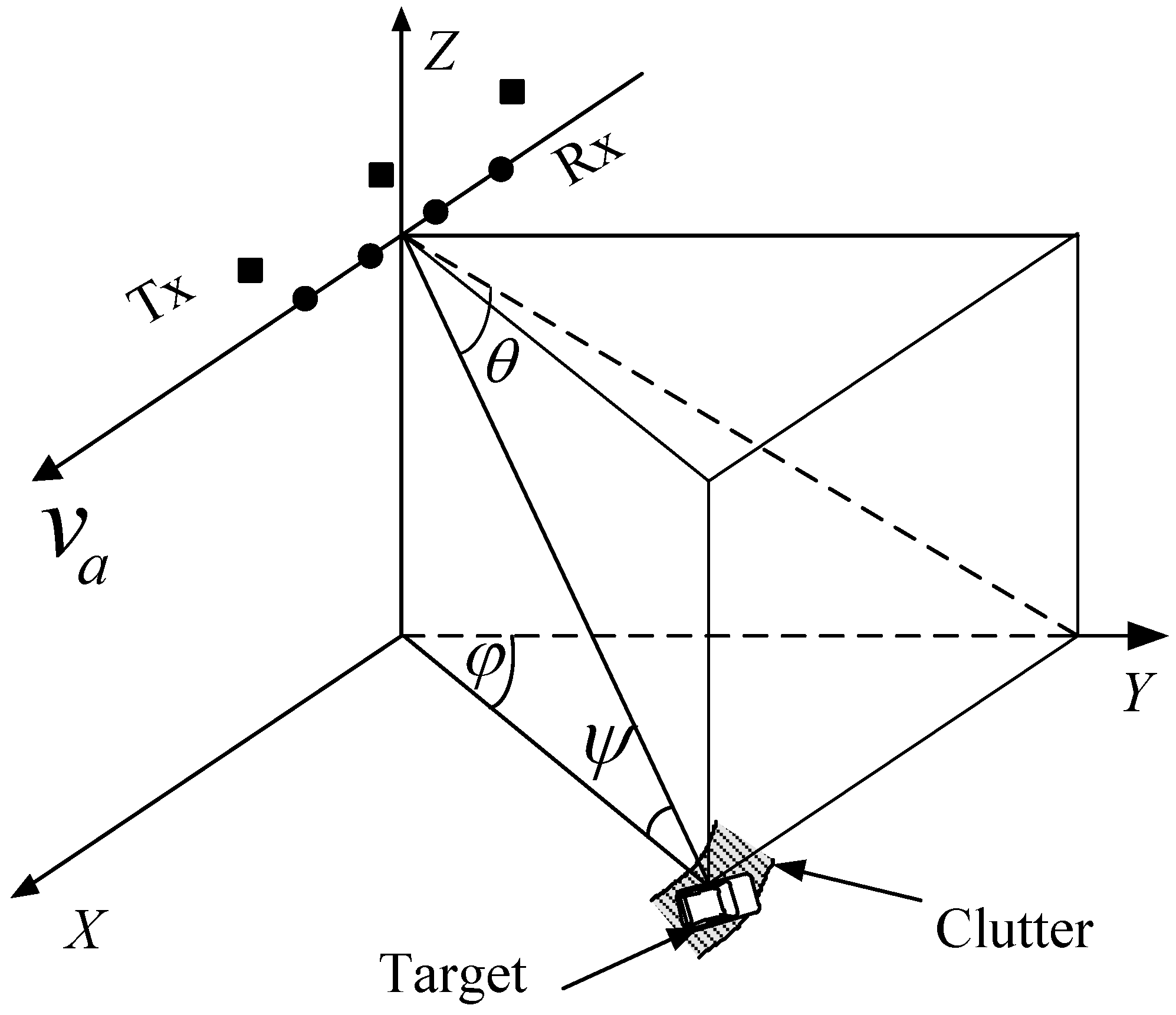
2.1. Range-Dependent Characteristic of Transmit Spatial Frequencies
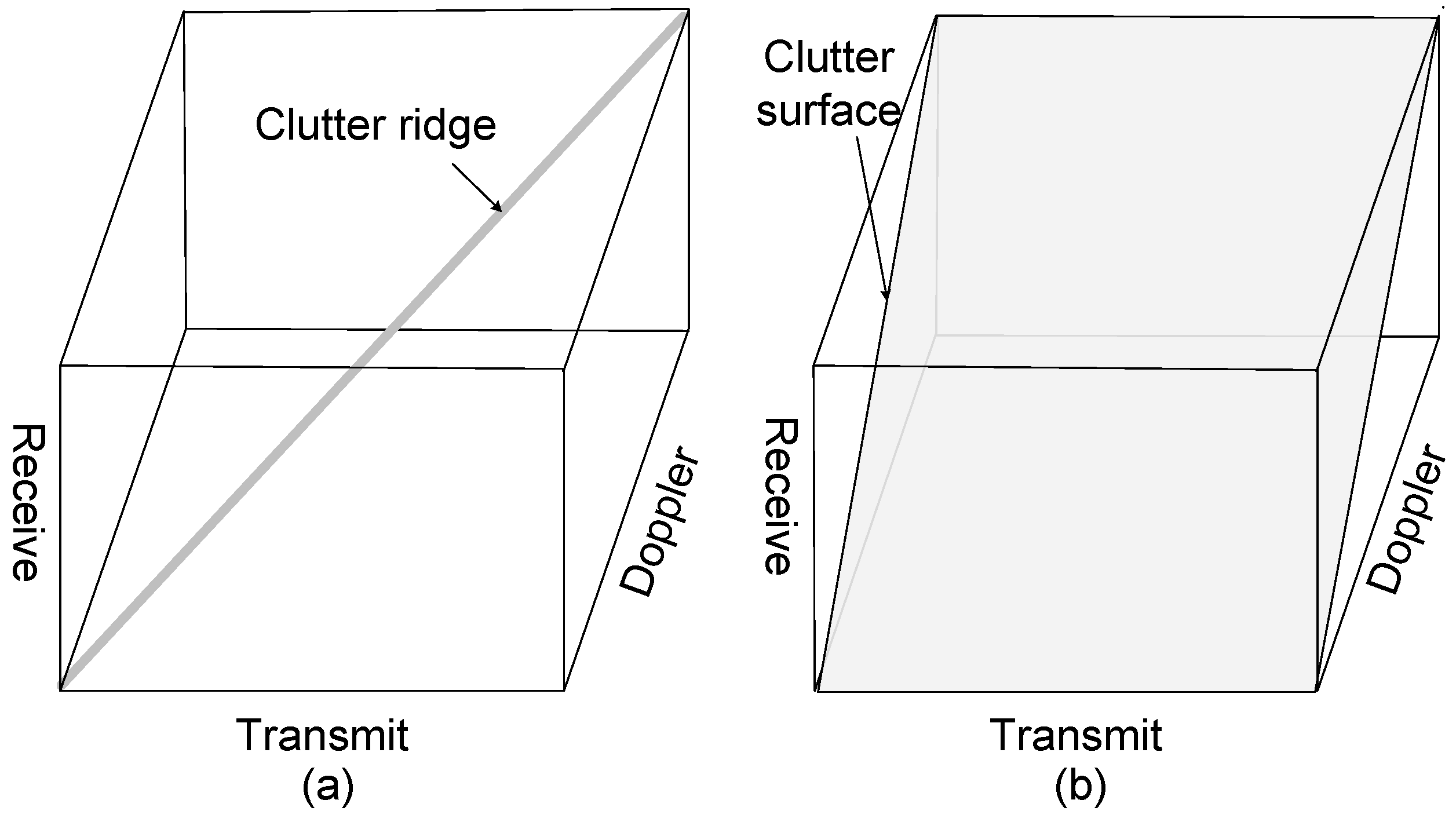
2.2. MIMO Responses
2.3. Comparison with Other Signal Models
3. The Steering Matrix for Different Waveforms
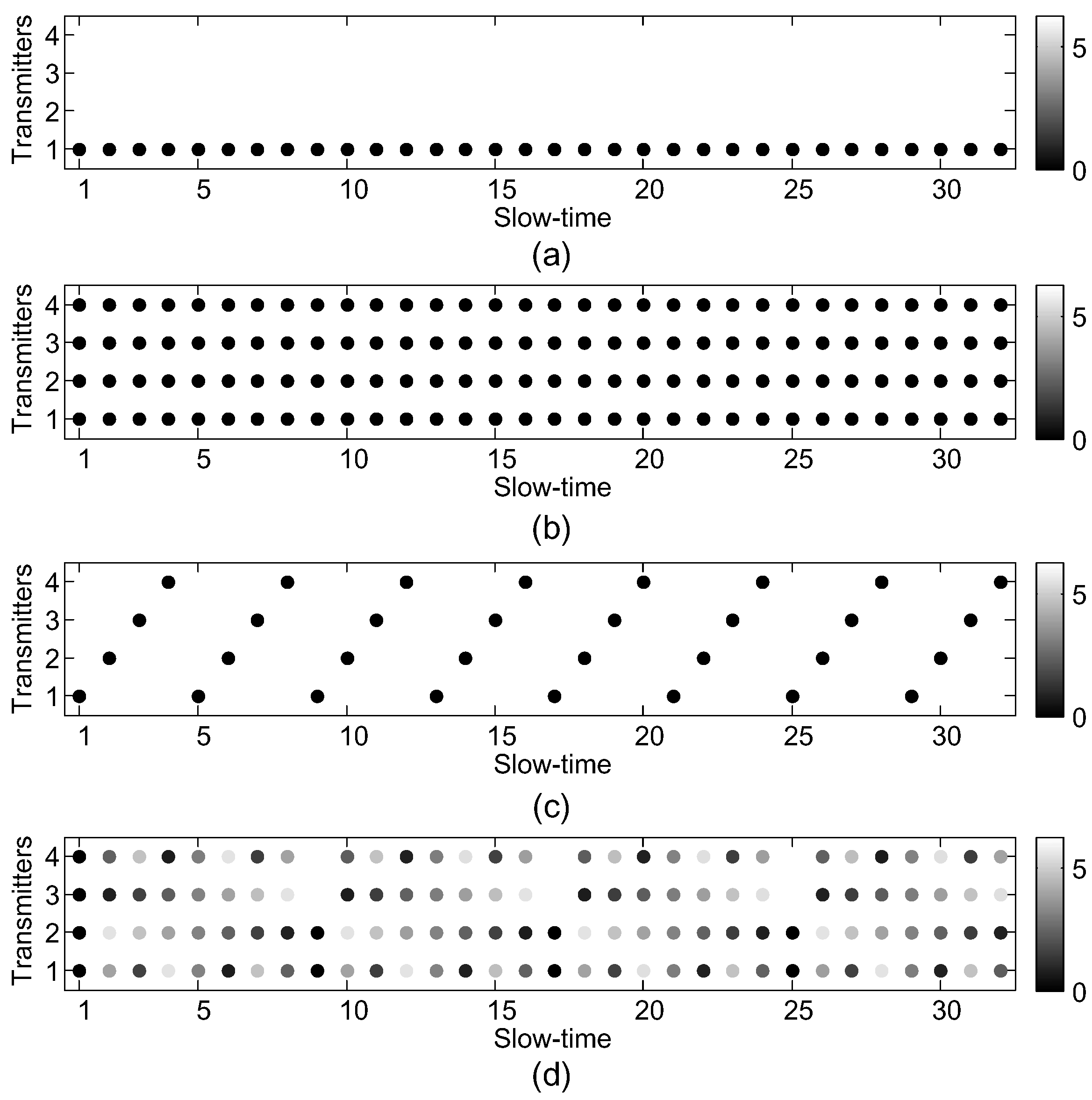
3.1. Slow-Time Waveforms
3.2. Fast-Time Waveforms
3.3. Comparison of the MIMO GMTI Radar Waveforms
3.4. Other Real-World Factors Affecting MIMO GMTI Performance
4. Simulation Results
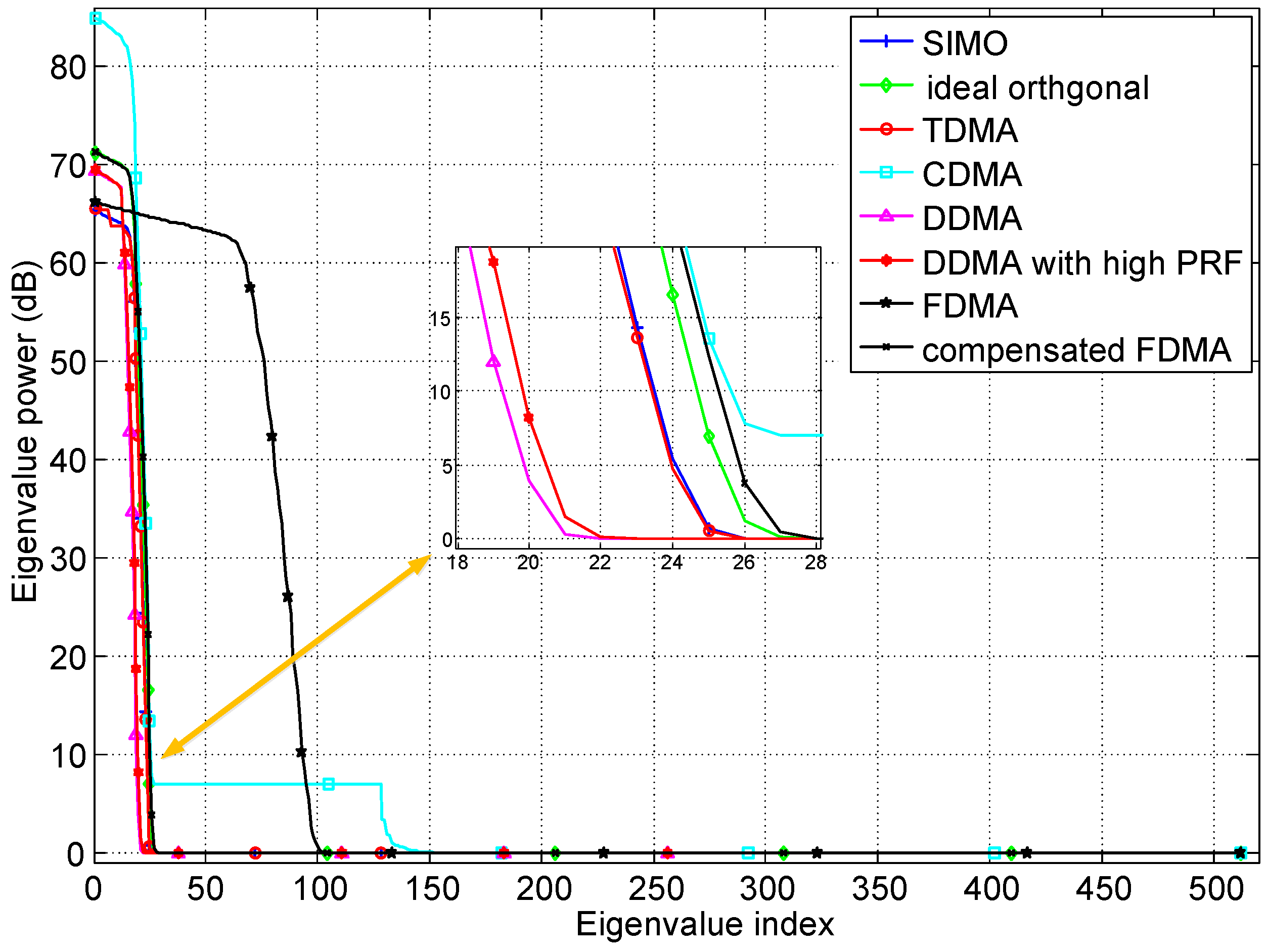
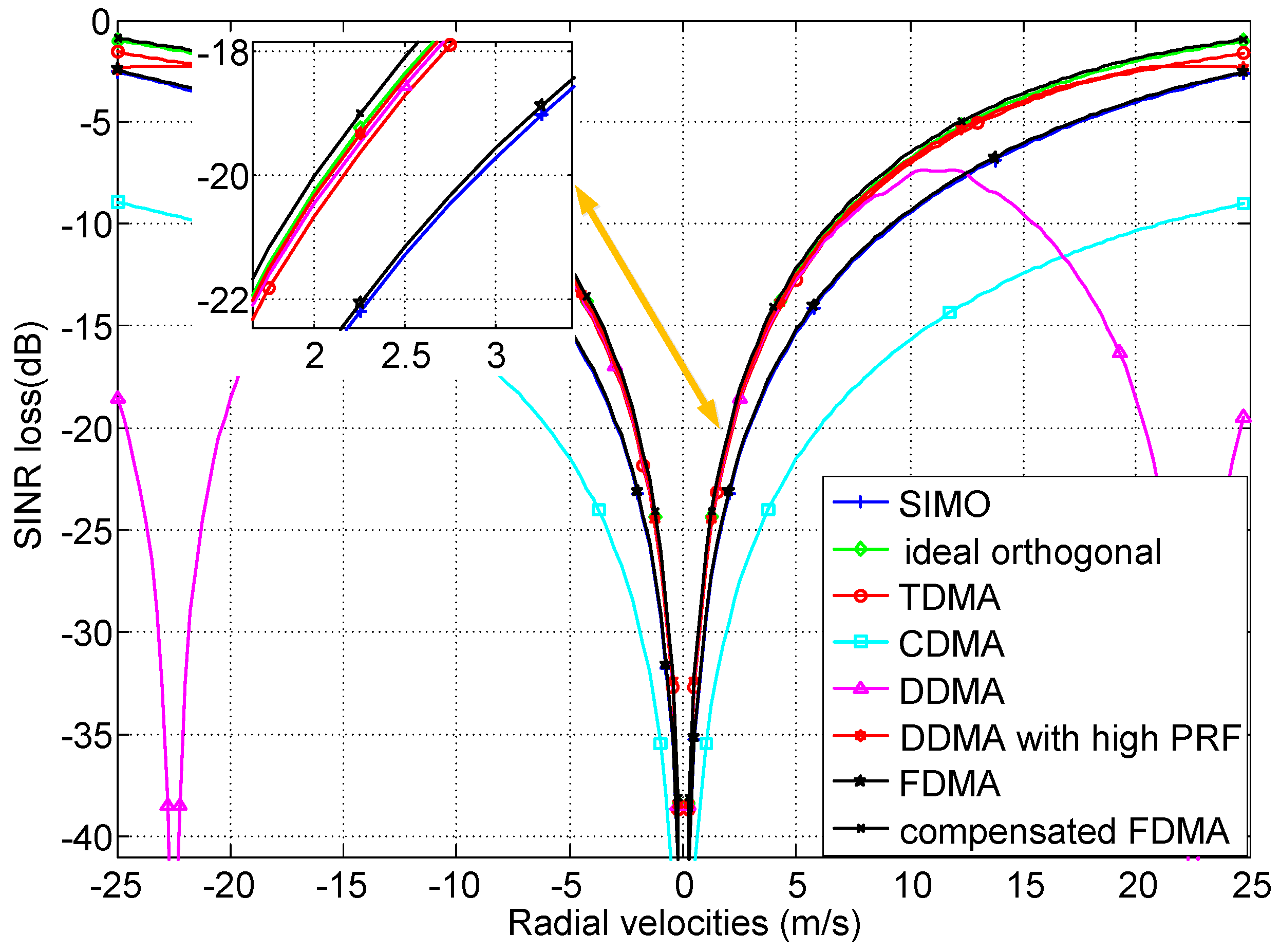
4.1. Performance Evaluation of Different Waveforms
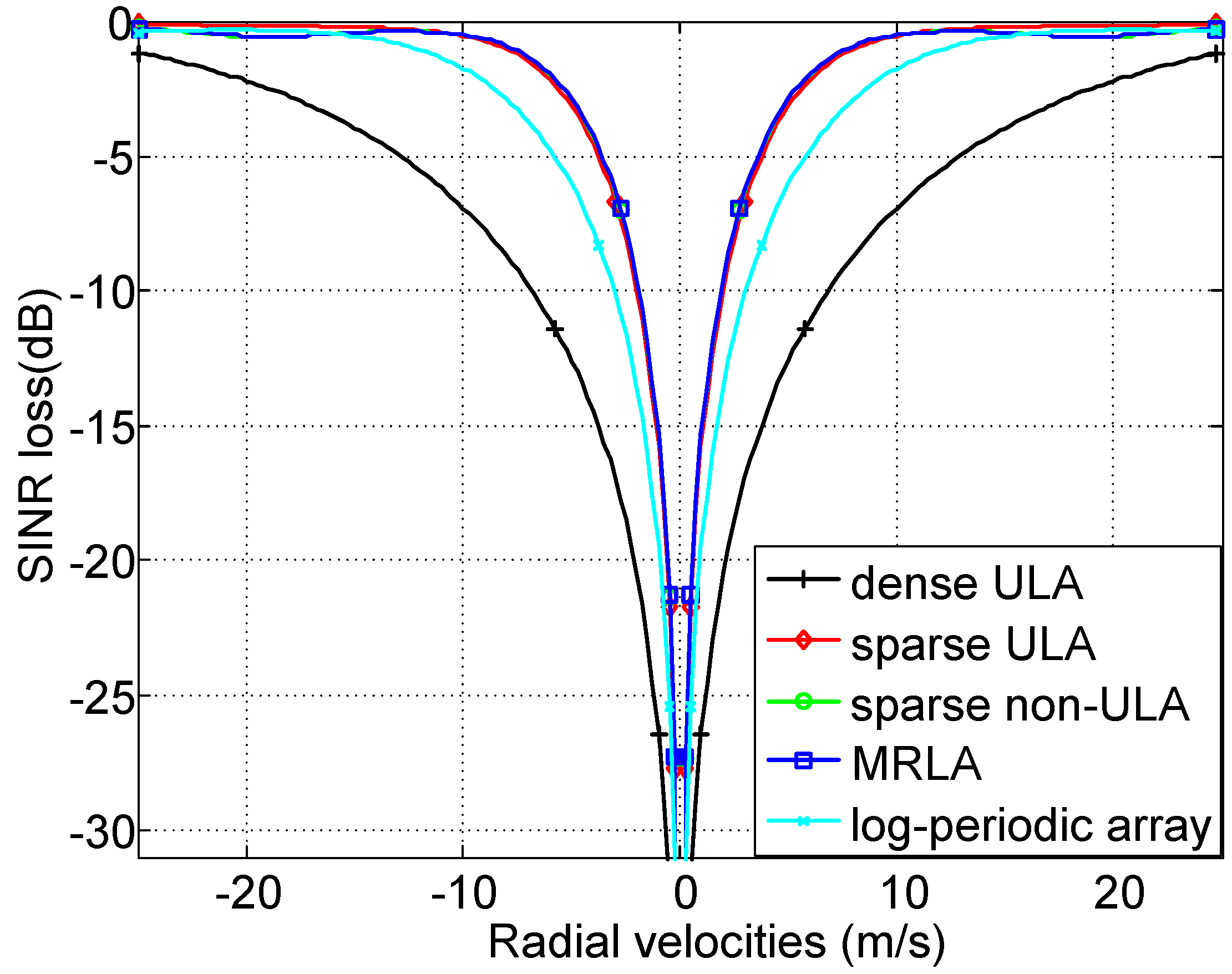
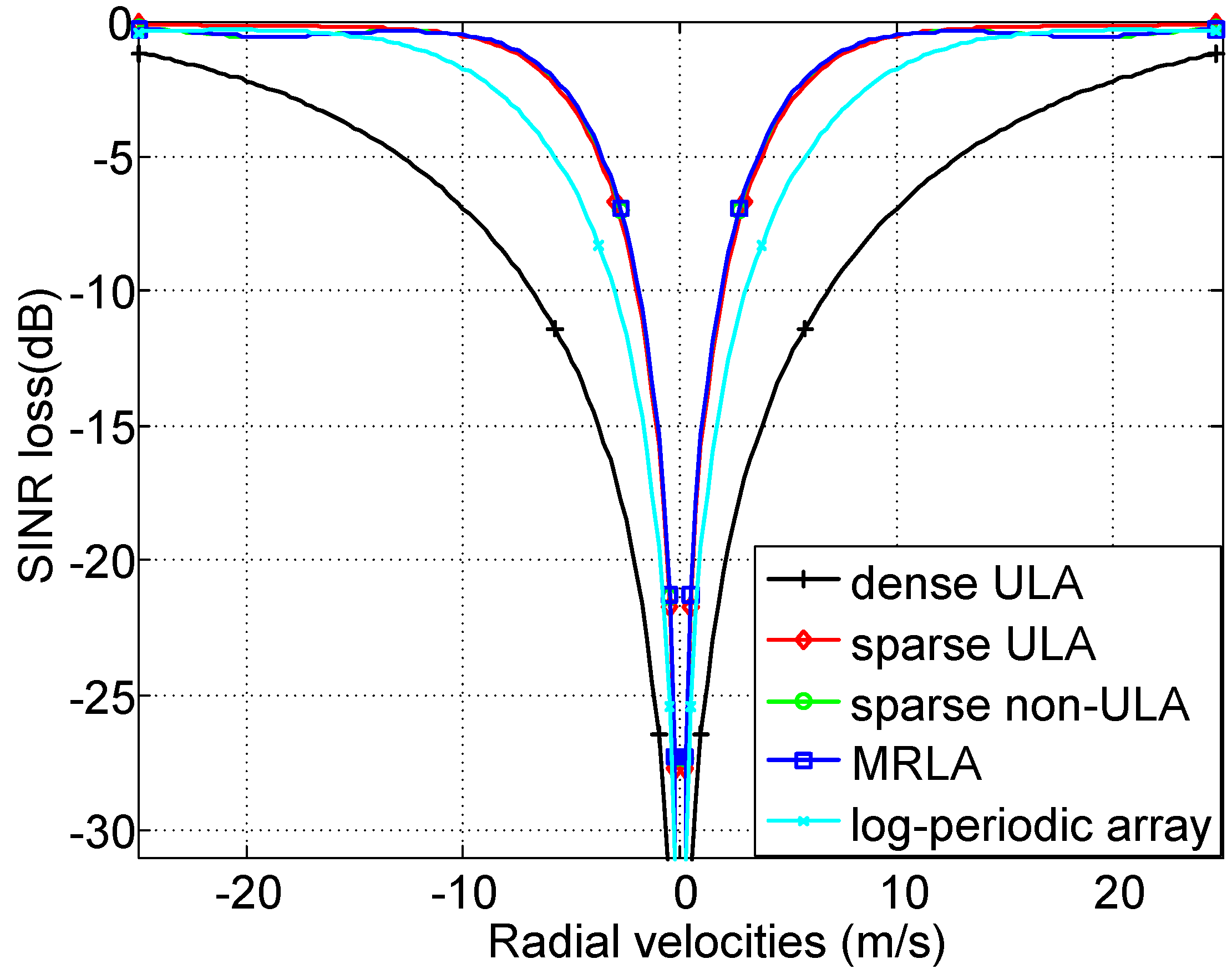
4.2. Performance Evaluation of Different Array Geometries
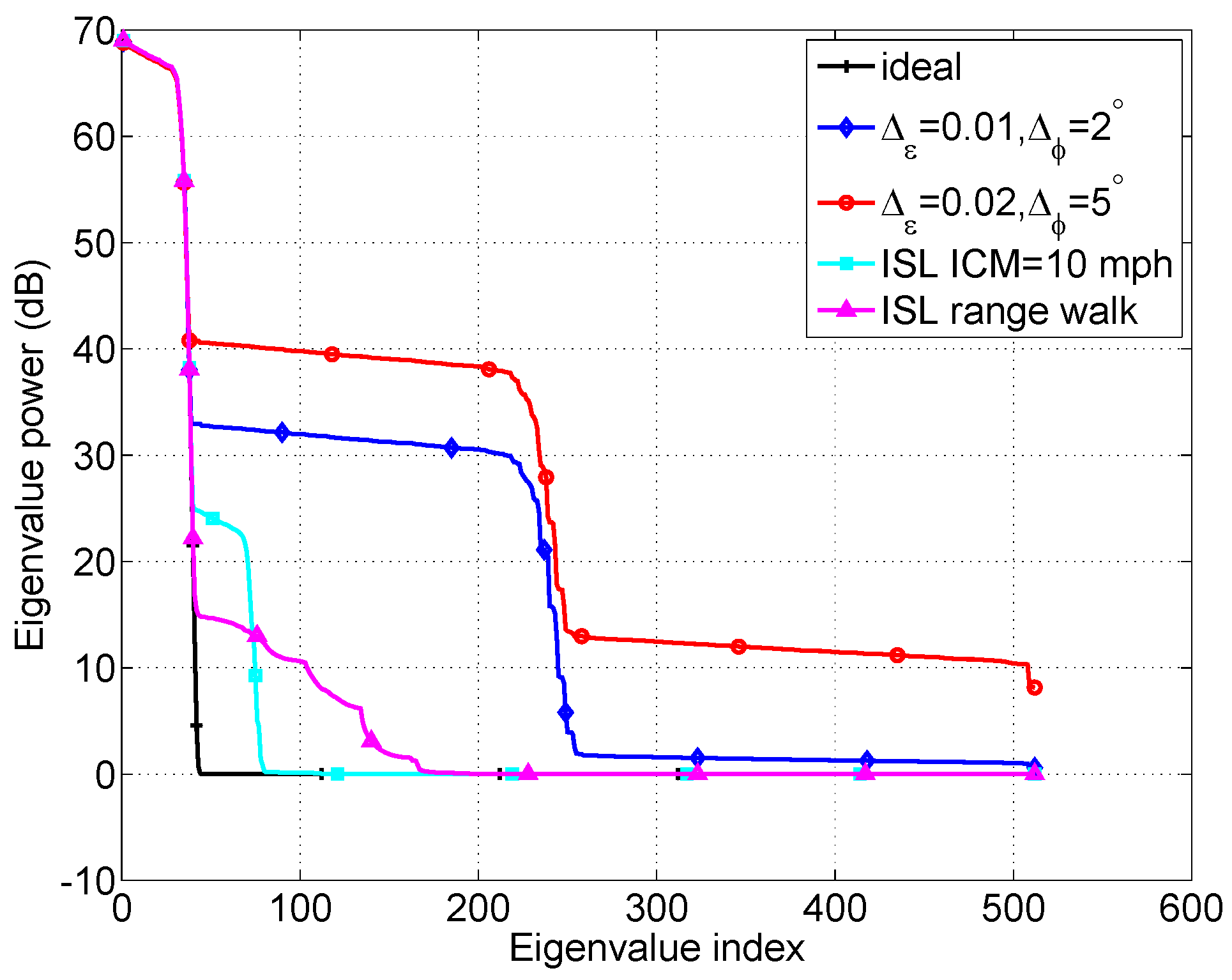
4.3. Performance Evaluation in Real-World Environments
5. Conclusions
Author Contributions
Funding
Conflicts of Interest
References
- Haimovich, A.M.; Blum, R.S.; Cimini, L.J., Jr. MIMO radar with widely separated antennas. IEEE Signal Proc. Mag. 2008, 25, 116–129. [Google Scholar] [CrossRef]
- Li, J.; Stoica, P. MIMO radar with colocated antennas. IEEE Signal Proc. Mag. 2007, 24, 106–114. [Google Scholar] [CrossRef]
- Davis, M.S.; Showman, G.A.; Lanterman, A.D. Coherent MIMO radar: The phased array and orthogonal waveforms. IEEE Aerosp. Electron. Syst. Mag. 2014, 29, 76–91. [Google Scholar] [CrossRef]
- Li, J.; Stoica, P. MIMO Radar Signal Processing; Wiley: Hoboken, NJ, USA, 2008; ISBN 978-0-470-17898-0. [Google Scholar]
- Li, F.; He, F.; Dong, Z.; Wu, M. Improved MIMO radar GMTI via cyclic-shift transmission of orthogonal frequency division signals. Int. J. Electron. 2018, 105, 756–770. [Google Scholar] [CrossRef]
- Krieger, G. MIMO-SAR: Opportunities and pitfalls. IEEE Trans. Geosci. Remote Sens. 2014, 52, 2628–2644. [Google Scholar] [CrossRef]
- Forsythe, K.W.; Bliss, D.W. MIMO radar waveform constraints for GMTI. IEEE J. Sel. Top. Signal Process. 2010, 4, 21–32. [Google Scholar] [CrossRef]
- Sun, H.; Gao, C.; Teh, K.C. Performance evaluation of practical MIMO radar waveforms. In Proceedings of the IEEE Radar Conference, Philadelphia, PA, USA, 2–6 May 2016; pp. 1–6. [Google Scholar]
- Zou, B.; Dong, Z.; Liang, D. Design and performance analysis of orthogonal coding signal in MIMO-SAR. Sci. China Inf. Sci. 2011, 54, 1723–1737. [Google Scholar] [CrossRef]
- Ender, J.H.G.; Gierull, C.H.; Cerutti-Maori, D. Improved space-based moving target indication via alternate transmission and receiver switching. IEEE Trans. Geosci. Remote Sens. 2008, 46, 3960–3974. [Google Scholar] [CrossRef]
- Bliss, D.W.; Forsythe, K.W.; Davis, S.K.; Fawcett, G.S.; Rabideau, D.J.; Horowitz, L.L.; Kraut, S. GMTI MIMO radar. In Proceedings of the IEEE International Waveform Diversity and Design Conference, Kissimmee, FL, USA, 8–13 February 2009; pp. 118–122. [Google Scholar]
- Rabideau, D.J. MIMO radar waveforms and cancellation ratio. IEEE Trans. Aerosp. Electron. Syst. 2012, 48, 1167–1178. [Google Scholar] [CrossRef]
- Tang, B.; Li, J.; Zhang, Y.; Tang, J. Design of MIMO radar waveform covariance matrix for clutter and jamming suppression based on space time adaptive processing. Signal Process. 2008, 121, 60–69. [Google Scholar] [CrossRef]
- Kantor, J.M.; Bliss, D.W. Clutter covariance matrices for GMTI MIMO radar. In Proceedings of the the Forty-Fourth Asilomar Conference on Signals, Systems and Computers, Pacific Grove, CA, USA, 7–10 November 2010; pp. 1821–1826. [Google Scholar]
- Xue, M.; Vu, D.; Xu, L.; Li, J.; Stoica, P. On MIMO radar transmission schemes for ground moving target indication. In Proceedings of the the Forty-Third Asilomar Conference on Signals, Systems and Computers, Pacific Grove, CA, USA, 1–4 November 2009; pp. 1171–1175. [Google Scholar]
- Wu, Y.; Tang, J.; Peng, Y. Models and performance evaluation for multiple-input multiple-output space-time adaptive processing radar. IET Radar Sonar Navig. 2009, 3, 569–582. [Google Scholar] [CrossRef]
- Xu, J.W.; Liao, G.S.; Zhu, S.Q.; Huang, L.; So, H.C. Joint range and angle estimation using MIMO radar with frequency diverse array. IEEE Trans. Signal Process. 2015, 63, 3396–3410. [Google Scholar] [CrossRef]
- Cheng, S.; Zhang, Q.; Bian, M.; Hao, X. An improved adaptive received beamforming for nested frequency offset and nested array FDA-MIMO radar. Sensors 2018, 18, 520. [Google Scholar] [CrossRef] [PubMed]
- Wang, X.; Serpedin, E. An overview on the applications of matrix theory in wireless communications and signal processing. Algorithms 2016, 9, 68. [Google Scholar] [CrossRef]
- Cerutti-Maori, D.; Ender, J.H.G.; Gierull, C.H. Experimental verification of SAR-GMTI improvement through antenna switching. IEEE Trans. Geosci. Remote Sens. 2010, 48, 2066–2075. [Google Scholar] [CrossRef]
- Mecca, V.F.; Krolik, J.L.; Robey, F.C. Beamspace slow-time MIMO radar for multipath clutter mitigation. In Proceedings of the International Conference on Acoustics, Speech and Signal Processing, Las Vegas, NV, USA, 31 March–4 April 2008; pp. 2313–2316. [Google Scholar]
- Li, F.; He, F.; Dong, Z.; Wu, M. Blind velocities mitigation for MIMO GMTI radar with Doppler division multiple access waveforms. AEÜ Int. J. Electron. Commun. 2017, 82, 486–491. [Google Scholar] [CrossRef]
- Guerci, J.R. Space-Time Adaptive Processing for Radar, 2nd ed.; Artech House: Boston, MA, USA, 2015; ISBN 978-1-60807-820-2. [Google Scholar]
- Billingsley, J.B. Exponential Decay in Windblown Radar Ground Clutter Doppler Spectra: Multifrequency Measurements and Model; Technical Report 997; MIT Lincoln Laboratory: Lexington, MA, USA, 29 July 1996. [Google Scholar]
- Klemm, R. Principles of Space-Time Adaptive Processing; The Institution of Electrical Engineers: London, UK, 2002; ISBN 0-85296-172-3. [Google Scholar]










{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Parameter | Symbol |
|---|---|
| number of transmitters | M |
| number of receivers | N |
| number of pulses per CPI | K |
| radar carrier frequency | |
| frequency step size for FDMA | |
| speed of light | |
| radar wavelength | |
| PRF | |
| PRI | |
| transmitters locations vector | |
| receivers locations vector | |
| platform velocity |
| Signal Models | Descriptions and Limitations |
|---|---|
| Traditional ideal orthogonal model | This model assumed the MIMO radar transmits the ideal orthogonal waveforms in fast time, which is difficult to be designed and implemented. The nonideal orthogonal waveforms cannot be analyzed by this model. |
| Traditional CDMA model | Based on the traditional model, the factor influencing the GMTI performance is the waveform covariance matrix. Based on the proposed model, the exact factor should be the accumulation of the WCM at all the delays, and this signal model is unavailable to the FDMA waveforms. |
| Traditional FDMA model | The performance of the MIMO GMTI waveforms with stepped carrier frequencies are analyzed in this model. The FDMA model is not applicable to the CDMA waveforms, even if the stepped size of the carrier frequencies is set as 0 because the echoes from different waveforms with different carrier frequencies are usually considered to be orthogonal. |
| General signal model for CDMA and FDMA waveforms in [16] | A General signal model for both CDMA and FDMA MIMO GMTI radar is proposed in [16]. However, the range-dependent characteristic of the FDMA waveforms is not considered. |
| Traditional model for slow-time waveforms | Slow-time waveforms such as DDMA can be analyzed, but the fast-time waveforms cannot be analyzed by this slow-time model. |
| The unified model for fast-time CDMA and slow-time waveforms in [15] | The signal model for fast-time CDMA and slow-time waveforms are unified by a space-time modulation matrix W. However, the common FDMA waveform cannot be included in this model. |
| Proposed general signal model | The proposed general signal model is available for all the waveforms of the MIMO GMTI radar, such as FDMA, CDMA, TDMA, DDMA, and so on. In addition, the GMTI performance of different waveforms can be compared relatively fairly. In addition, the performance of the MIMO GMTI radar with different array geometries can be analyzed by this model. |
| Waveforms | Structure of the Steering Vector | Merits and Limitations |
|---|---|---|
| Ideal orthogonal waveforms | Best performance can be achieved, but it is difficult to be realized. | |
| CDMA | The performance is affected by , so it is not suitable for distributed clutter. In cognitive radar, it can be used for the MIMO GMTI radar for the specific target. | |
| DDMA | After range compression and echo separation, the structure of the steering vector is the same as the ideal orthogonal waveforms, so it is a choice of MIMO GMTI radar. Sufficient PRF freedom is required, so Doppler ambiguities will arise. | |
| TDMA | TDMA waveforms are similar to DDMA waveforms. Sufficient PRF freedom is required. Compared to the other MIMO waveforms, the same transmit power required longer coherent processing time. | |
| FDMA | The steering vector is associated with the ranges of the clutter patches, so the echoes of different transmit waveforms with different carrier frequencies are not IID, which will degrade the GMTI performance. The blind velocities can be suppressed. | |
| Range- compensated FDMA | Compared to the traditional FDMA, the ranges are compensated, so the echoes from different ranges are IID. The transmit freedom is fully used. The GMTI performance is limited by the accuracy of the range compensation. |
| Array Geometries | Location Vectors (m) | Length of Virtual Array (m) |
|---|---|---|
| dense ULA | 0.09 | |
| sparse ULA | 0.36 | |
| sparse non-ULA | 0.36 | |
| MRLA | 0.36 | |
| log-periodic sparse array | 0.21 |
© 2018 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Li, F.; He, F.; Dong, Z.; Wu, M.; Zhang, Y. General Signal Model for Multiple-Input Multiple-Output GMTI Radar. Sensors 2018, 18, 2576. https://doi.org/10.3390/s18082576
Li F, He F, Dong Z, Wu M, Zhang Y. General Signal Model for Multiple-Input Multiple-Output GMTI Radar. Sensors. 2018; 18(8):2576. https://doi.org/10.3390/s18082576
Chicago/Turabian StyleLi, Fuyou, Feng He, Zhen Dong, Manqing Wu, and Yongsheng Zhang. 2018. "General Signal Model for Multiple-Input Multiple-Output GMTI Radar" Sensors 18, no. 8: 2576. https://doi.org/10.3390/s18082576
APA StyleLi, F., He, F., Dong, Z., Wu, M., & Zhang, Y. (2018). General Signal Model for Multiple-Input Multiple-Output GMTI Radar. Sensors, 18(8), 2576. https://doi.org/10.3390/s18082576