Analysis and Modeling Methodologies for Heat Exchanges of Deep-Sea In Situ Spectroscopy Detection System Based on ROV

Abstract
:1. Introduction
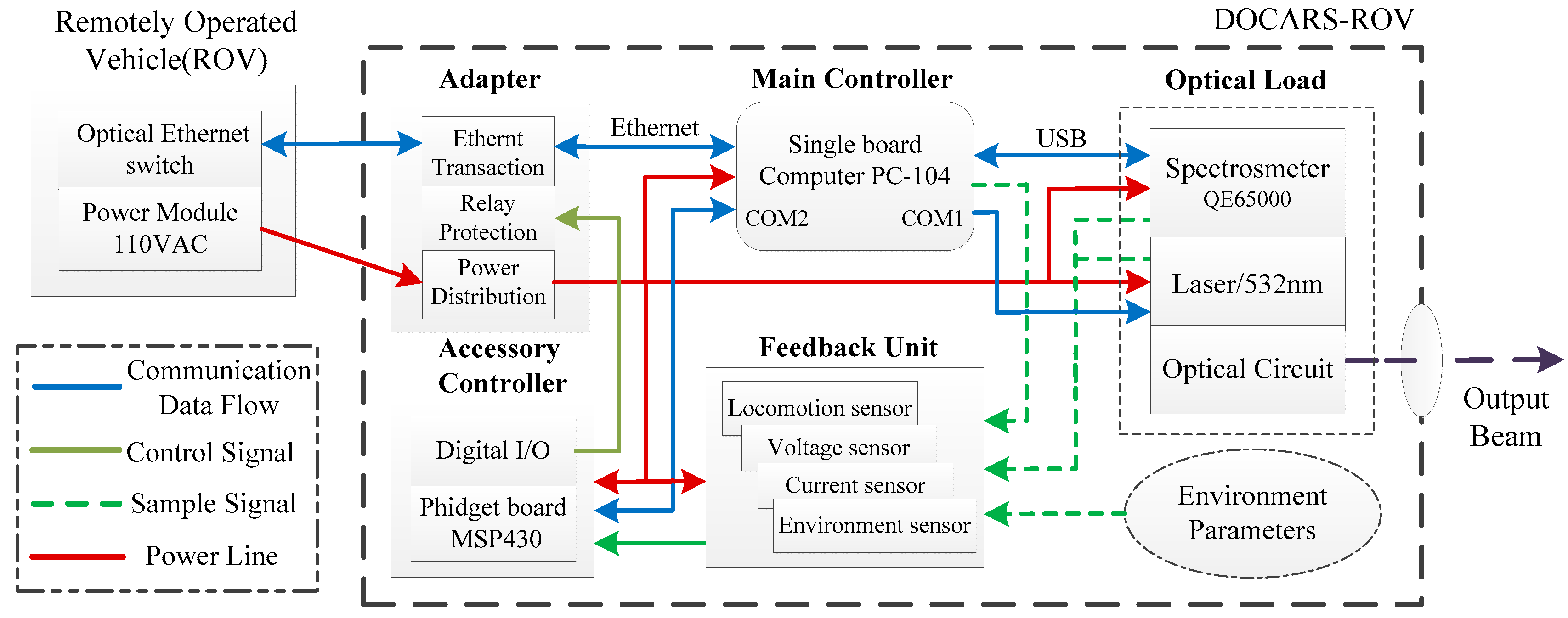
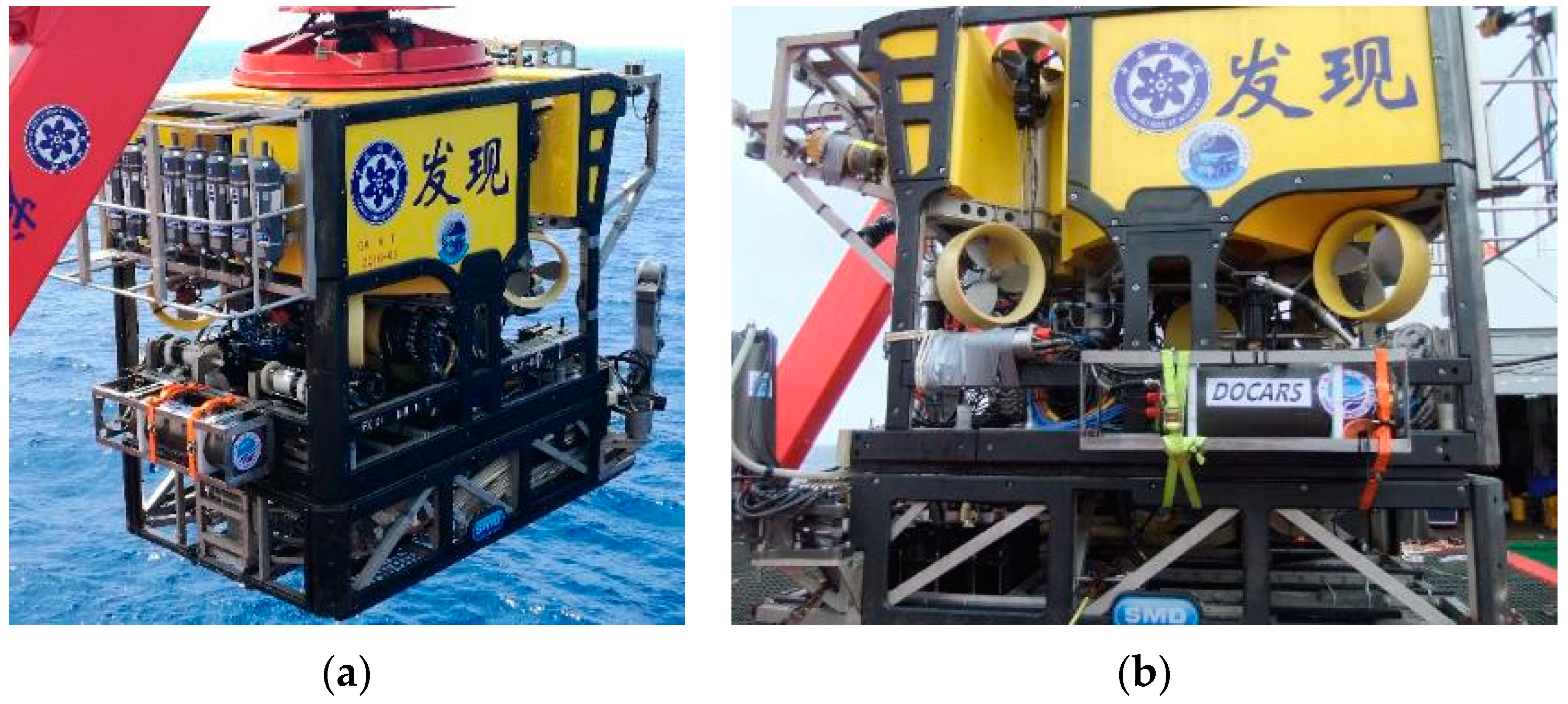
2. System Design
3. Modeling for Profile Measurement Process
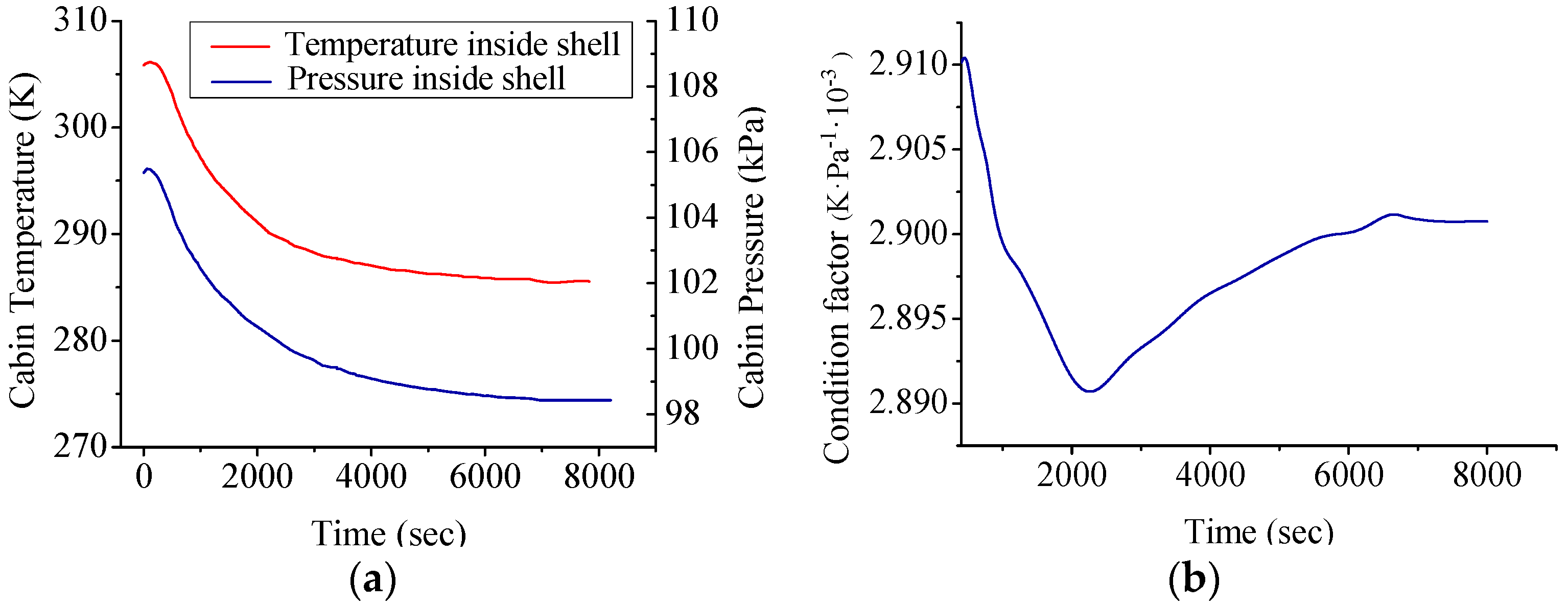
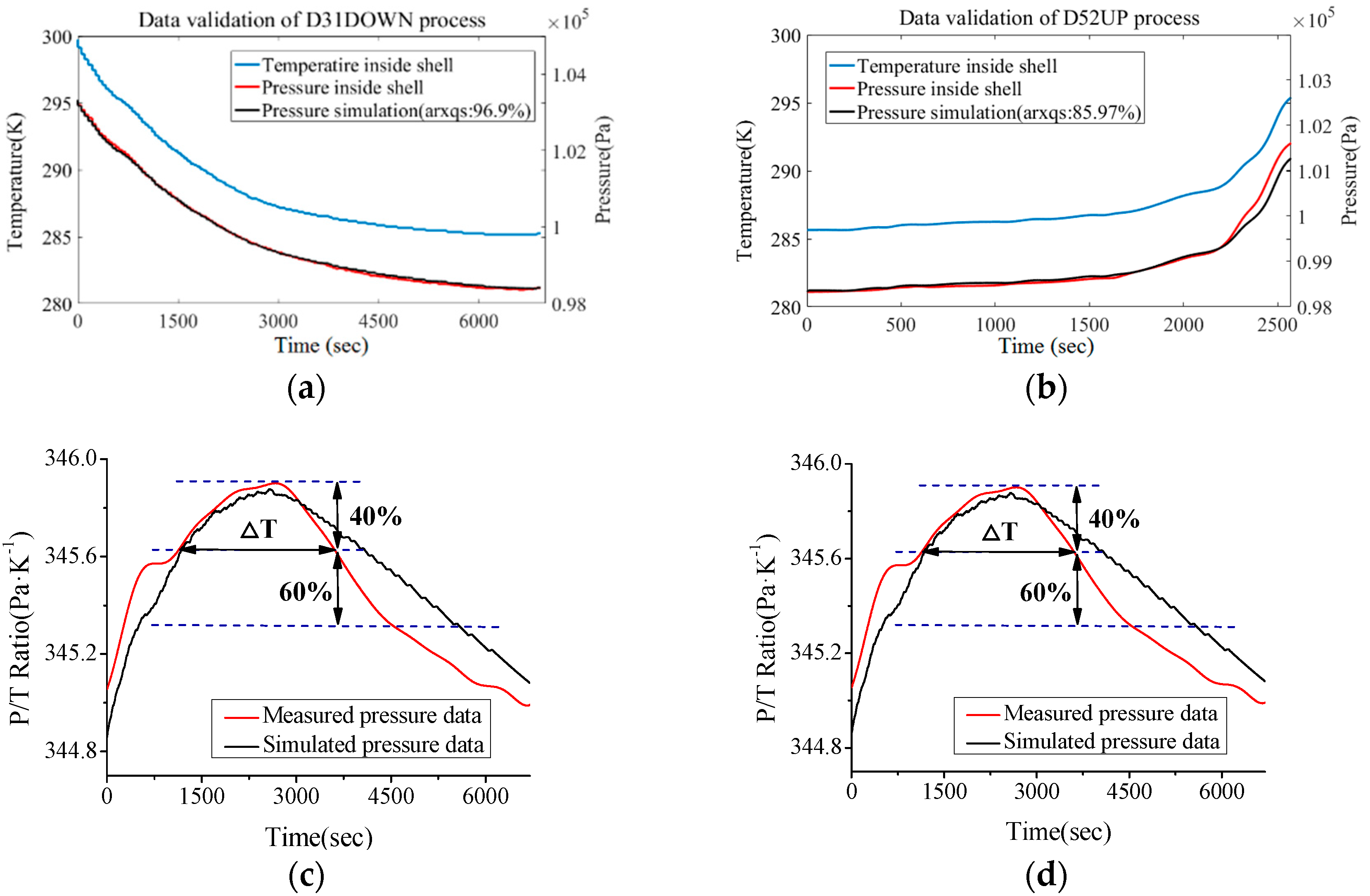
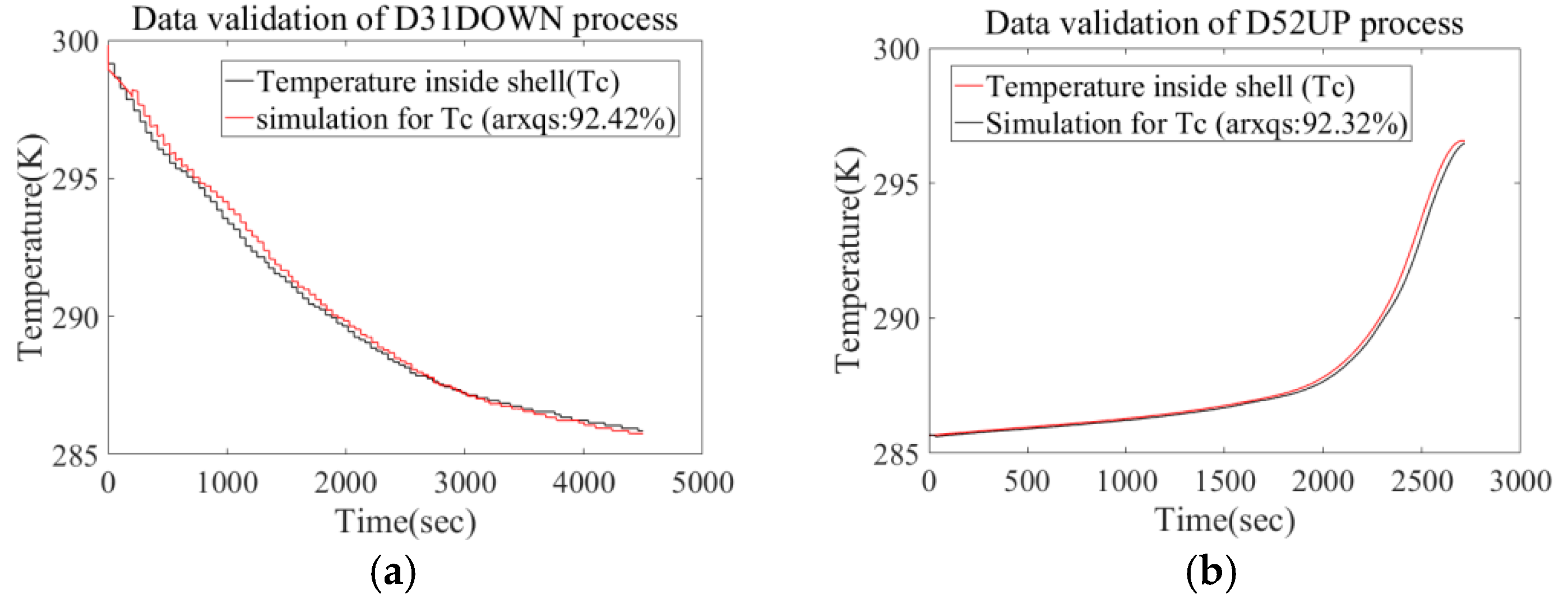
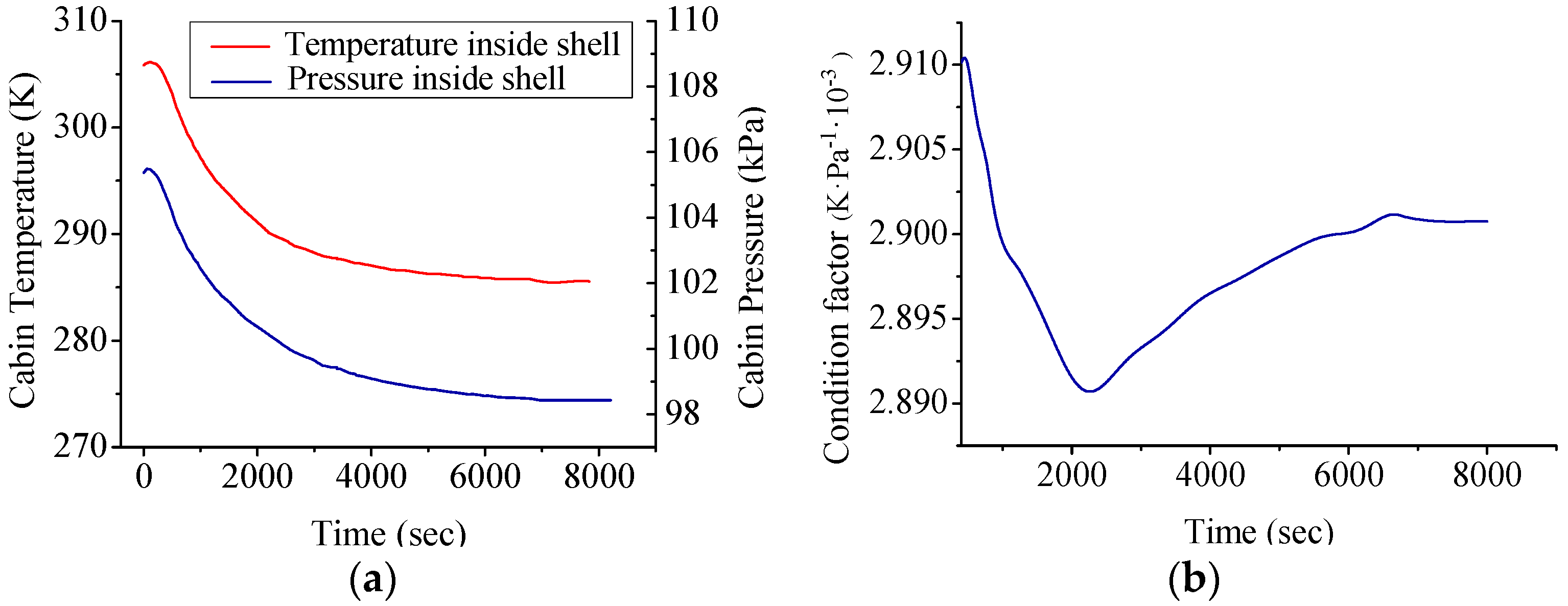
3.1. Temperature Prediction
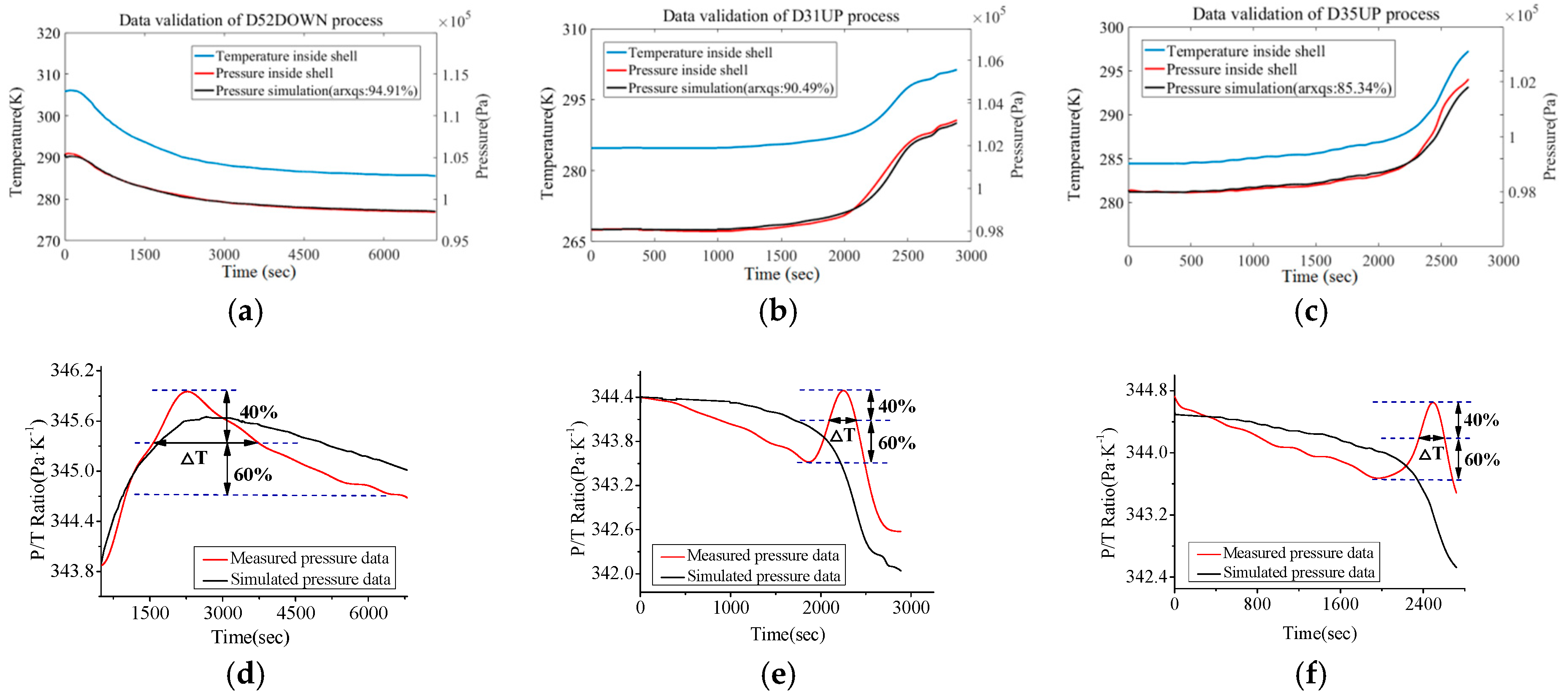
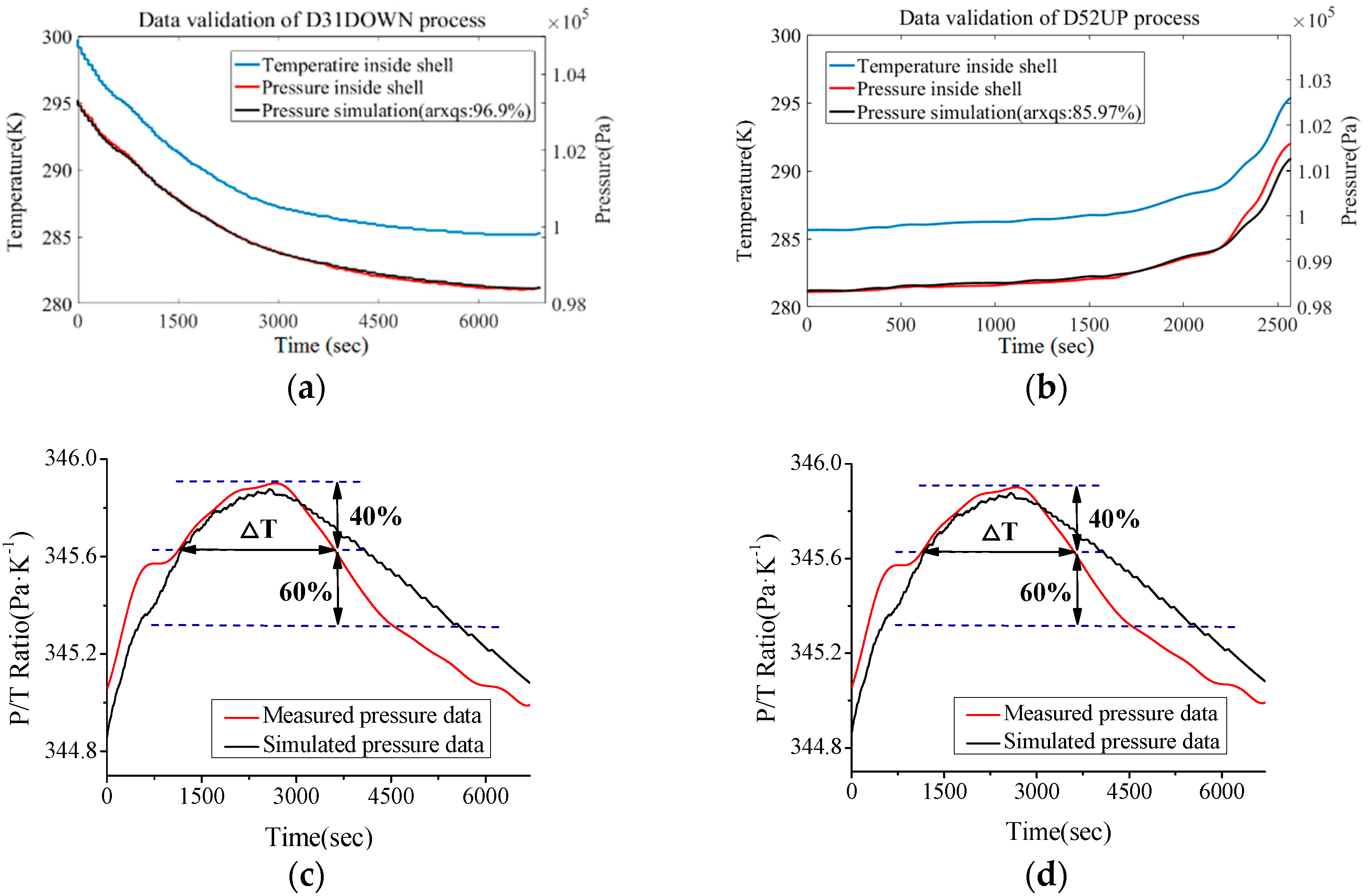
3.2. Pressure Prediction
4. Conclusions
Author Contributions
Funding
Acknowledgments
Conflicts of Interest
References
- Zhang, X.; Du, Z.; Zheng, R.; Luan, Z.; Qi, F.; Cheng, K.; Wang, B.; Ye, W.; Liu, X.; Lian, C.; et al. Development of a new deep-sea hybrid Raman insertion probe and its application to the geochemistry of hydrothermal vent and cold seep fluids. Deep Sea Res. Part I 2017, 123, 1–12. [Google Scholar] [CrossRef]
- Peltzer, E.T.; Zhang, X.; Walz, P.M.; Luna, M.; Brewer, P.G. In situ, Raman measurement of HS−, and H2S in sediment pore waters and use of the HS−: H2S ratio as an indicator of pore water pH. Mar. Chem. 2016, 184, 32–42. [Google Scholar] [CrossRef]
- Zhang, X.; Du, Z.; Zheng, R.; Luan, Z.; Qi, F.; Cheng, K.; Wang, B.; Ye, W.; Liu, X.; Chen, C.; et al. Development of a new hybrid Raman insertion probe for deep-ocean science. In Proceedings of the MTS/IEEE Oceans Conference, Monterey, CA, USA, 19–23 September 2016. [Google Scholar]
- Brewer, P.G.; Malby, G.; Pasteris, J.D.; White, S.N.; Peltzer, E.T.; Wopenka, B.; Freeman, J.; Brown, M.O. Development of a laser Raman spectrometer for deep-ocean science. Deep Sea Res. Part I 2004, 51, 739–753. [Google Scholar] [CrossRef]
- Zhang, X.; Hester, K.C.; Ussler, W.; Walz, P.M.; Peltzer, E.T.; Brewer, P.G. In situ Raman-based measurements of high dissolved methane concentrations in hydrate-rich ocean sediments. Geophys. Res. Lett. 2011, 38, 134–144. [Google Scholar] [CrossRef]
- White, S.N. Laser Raman spectroscopy as a technique for identification of seafloor hydrothermal and cold seep minerals. Chem. Geol. 2009, 259, 240–252. [Google Scholar] [CrossRef] [Green Version]
- Tian, Y.; Xue, B.; Song, J.; Lu, Y.; Zheng, R. Non-gated laser-induced breakdown spectroscopy in bulk water by position-selective detection. Appl. Phys. Lett. 2015, 107, 111107. [Google Scholar] [CrossRef]
- Dunk, R.M.; Peltzer, E.T.; Walz, P.M.; Brewer, P.G. Seeing a Deep Ocean CO2 Enrichment Experiment in a New Light: Laser Raman Detection of Dissolved CO2 in Seawater. Environ. Sci. Technol. 2005, 39, 9630–9636. [Google Scholar] [CrossRef] [PubMed]
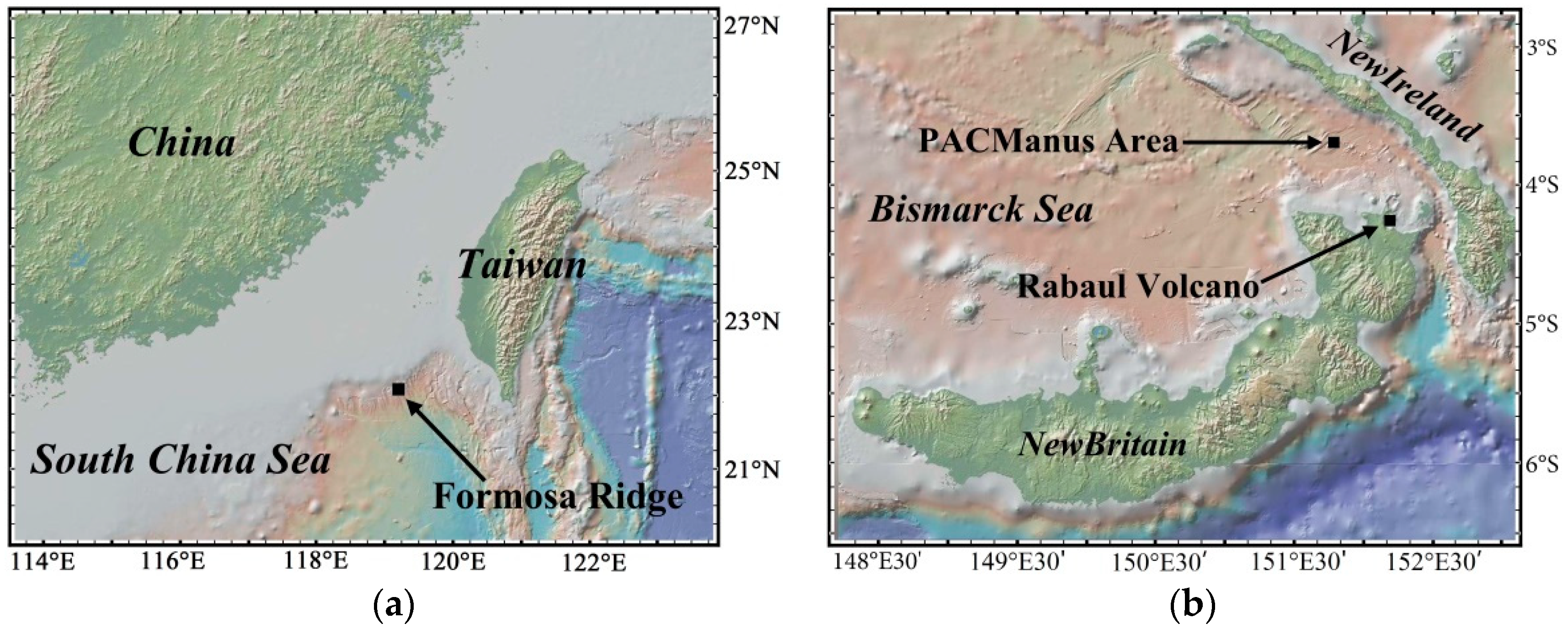
- Berndt, C.; Crutchley, G.; Klaucke, I.; Jegen, M.; Lebas, E.; Muff, S.; Lieser, K.; Roth, T.; Chi, W.-C.; Feseker, T.; et al. Geological controls on the gas hydrate system of Formosa Ridge, South China Sea. In Proceedings of the Oceans Conference, Taipei, Taiwan, 7–10 April 2014; pp. 1–4. [Google Scholar]
- Guo, J.; Lu, Y.; Cheng, K.; Song, J.; Ye, W.; Li, N.; Zheng, R. Development of a compact underwater laser-induced breakdown spectroscopy (LIBS) system and preliminary results in sea trials. Appl. Opt. 2017, 56, 8196–8200. [Google Scholar] [CrossRef] [PubMed]
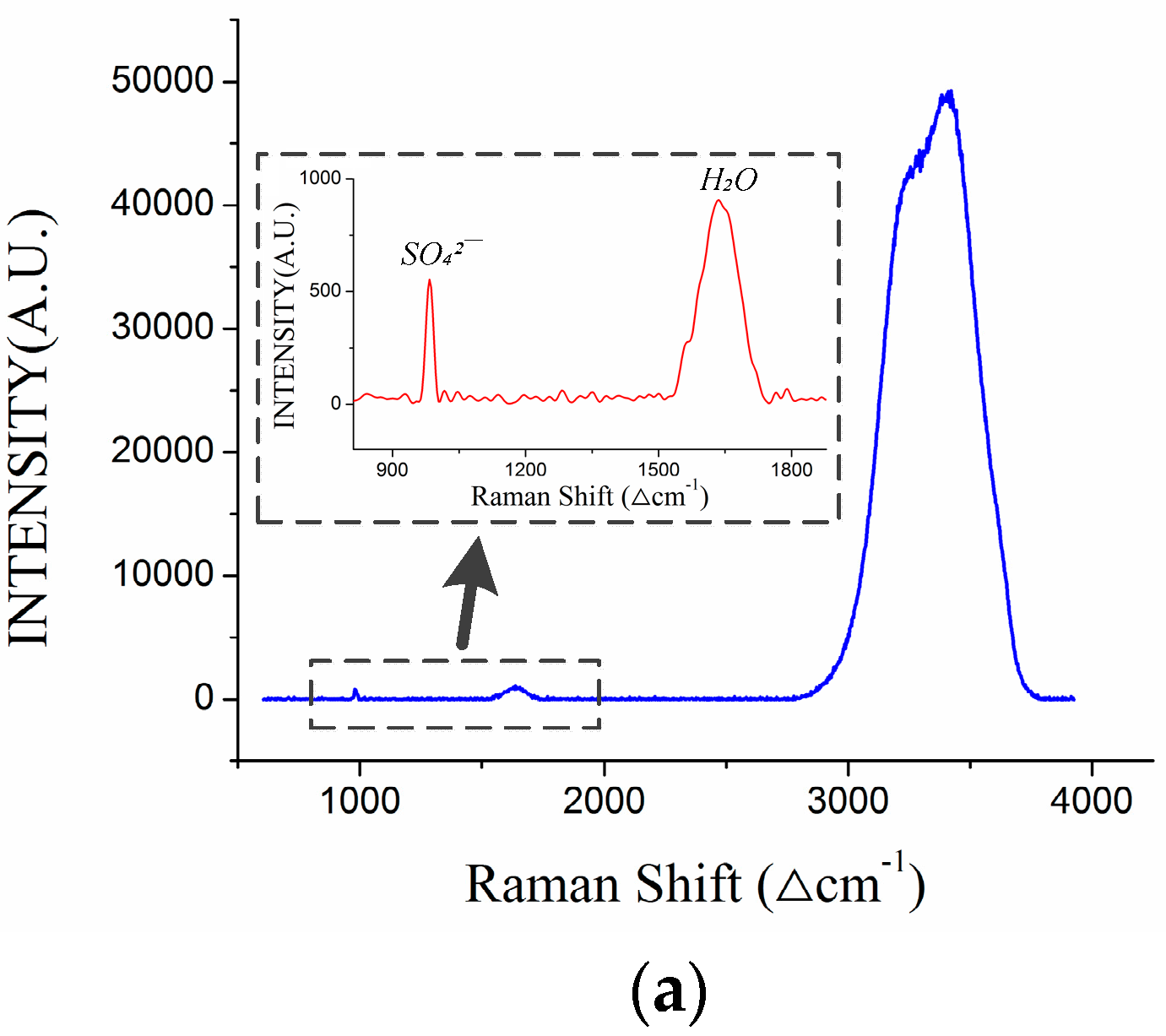
- Du, Z.; Chen, J.; Ye, W.; Guo, J.; Zhang, X.; Zheng, R. Investigation of Two Novel Approaches for Detection of Sulfate Ion and Methane Dissolved in Sediment Pore Water Using Raman Spectroscopy. Sensors 2015, 15, 12377–12388. [Google Scholar] [CrossRef] [PubMed] [Green Version]
- Wei, Z.; Song, M.; Yin, G.; Wang, H.; Ma, X.; Song, H. Cross Deployment Networking and Systematic Performance Analysis of Underwater Wireless Sensor Networks. Sensors 2017, 17, 1619. [Google Scholar] [CrossRef] [PubMed]
- Yinger, P.; Tennant, P.; Reardon, J.; Harkins, G.; McGuire, C.; Harrington, M.; Mulvihill, M. Commissioning of a system that terminates on the seafloor. In Proceedings of the MTS/IEEE Oceans Conference, San Diego, CA, USA, 23–27 September 2013. [Google Scholar]
- Barnes, C.R.; Best, M.M.R.; Bornhold, B.D.; Juniper, S.K.; Pirenne, B.; Phibbs, P. The NEPTUNE Project—A cabled ocean observatory in the NE Pacific: Overview, challenges and scientific objectives for the installation and operation of Stage I in Canadian waters. In Proceedings of the 5th International Symposium on Underwater Technology and Workshop on Scientific Use of Submarine Cables and Related Technologies, Tokyo, Japan, 17–20 April 2007; pp. 308–313. [Google Scholar]
- El-Sharkawi, M.A.; Upadhye, A.; Lu, S.; Kirkham, H.; Howe, B.M.; McGinnis, T.; Lancaster, P. North east pacific time-integrated undersea networked experiments (NEPTUNE): Cable switching and protection. IEEE J. Oceanic Eng. 2005, 30, 232–240. [Google Scholar] [CrossRef]
- Ye, W.; Li, Y.; Li, W.; Qi, F.; Zheng, R. Shore-based terminal of OUC-Raman instrument node for seafloor cabled observatory network. In Proceedings of the 10th International Conference on Sensing Technology (ICST), Nanjing, China, 11–13 November 2016. [Google Scholar]
- Liu, X.; Qi, F.; Ye, W.; Song, Z.; Zheng, R. Design and reliability analysis for underwater control system in OUC-Raman instrument node of seafloor observatory network. In Proceedings of the 10th International Conference on Sensing Technology (ICST), Nanjing, China, 11–13 November 2016. [Google Scholar]
- Yang, D.; Guo, J.; Liu, Q.; Luo, Z.; Yan, J.; Zheng, R. Highly sensitive Raman system for dissolved gas analysis in water. Appl. Opt. 2016, 55, 7744–7748. [Google Scholar] [CrossRef] [PubMed]
- Du, Z.; Li, Y.; Chen, J.; Guo, J. Feasibility investigation on deep ocean compact autonomous Raman spectrometer developed for in situ detection of acid radical ions. Chin. J. Oceanol. Limnol. 2015, 33, 545–550. [Google Scholar] [CrossRef]
- Klein, I.; Diamant, R. Observability Analysis of DVL/PS Aided INS for a Maneuvering AUV. Sensors 2015, 15, 26818–26837. [Google Scholar] [CrossRef] [PubMed] [Green Version]
- Duraibabu, D.B.; Leen, G.; Toal, D.; Newe, T.; Lewis, E.; Dooly, G. Underwater Depth and Temperature Sensing Based on Fiber Optic Technology for Marine and Fresh Water Applications. Sensors 2017, 17, 1228. [Google Scholar] [CrossRef] [PubMed]
- Tandeo, P.; Autret, E.; Piollé, J.F.; Tournadre, J.; Ailliot, P. A Multivariate Regression Approach to Adjust AATSR Sea Surface Temperature to In Situ Measurements. IEEE Geosci. Remote Sens. Lett. 2009, 6, 8–12. [Google Scholar] [CrossRef] [Green Version]
- Chen, Y.; Howe, B.M.; Yang, C. Actively Controllable Switching for Tree Topology Seafloor Observation Networks. IEEE J. Oceanic Eng. 2015, 40, 993–1002. [Google Scholar] [CrossRef]
- McGinnis, T.; Michel-Hart, N.; Mathewson, M.; Shanahan, T. Deep profiler for the ocean observatories initiative Regional Scale Nodes: Rechargable, Adaptive, ROV Servicable. In Proceedings of the MTS/IEEE Oceans Conference, San Diego, CA, USA, 23–27 September 2013. [Google Scholar]
- Toma, D.M.; Mànuel-Làzaro, A.; Nogueras, M.; Del Rio, J. Study on Heat Dissipation and Cooling Optimization of the Junction Box of OBSEA Seafloor Observatory. IEEE/ASME Trans. Mech. 2015, 20, 1301–1309. [Google Scholar] [CrossRef] [Green Version]
- Mcdonald, G.; Naiman, M. Heat-transfer advances for submerged oceanographic systems. In Proceedings of the MTS/IEEE Oceans Conference, Biloxi, MI, USA, 29–31 October 2002. [Google Scholar]
- Karim, O.; Crebier, J.C.; Gillot, C.; Schaeffer, C.; Mallet, B.; Gimet, E. Heat transfer coefficient for water cooled heat sink: Application for standard power modules cooling at high temperature. In Proceedings of the Power Electronics Specialists Conference, Vancouver, BC, Canada, 17–21 June 2001. [Google Scholar]
- Nasr, K.B.; Chouikh, R.; Kerkeni, C.; Guizani, A. Numerical study of the natural convection in cavity heated from the lower corner and cooled from the ceiling. Appl. Therm. Eng. 2006, 26, 772–775. [Google Scholar] [CrossRef]
- Zhao, W.; Chen, H.; Zheng, W. Recursive Identification for Nonlinear ARX Systems Based on Stochastic Approximation Algorithm. IEEE Trans. Automat. Control 2010, 55, 1287–1299. [Google Scholar] [CrossRef]
- Eng, Y.H.; Teo, K.M.; Chitre, M.; Ng, K.M. Online System Identification of an Autonomous Underwater Vehicle via In-Field Experiments. IEEE J. Oceanic Eng. 2016, 41, 5–17. [Google Scholar] [CrossRef]









{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Index | Investigation Area | Profile Depth (m) |
|---|---|---|
| #31 | PACManus hydrothermal field, Paul Ridge | 1731 |
| #35 | PACManus hydrothermal field, Paul Ridge | 2180 |
| #52 | South China Sea, Formosa Ridge, cold seep site | 1170 |
| Diving ID | Time to across Thermocline ∆t (s) | Temperature Shift ∆Ts (K) | ∆Ts/∆t (10−3 K/s) |
|---|---|---|---|
| D31DOWN | 2358 | 11.32 | 4.80 |
| D31UP | 326 | 17.03 | 52.23 |
| D35UP | 361 | 14.96 | 41.44 |
| D52DOWN | 2164 | 15.86 | 7.32 |
| D52UP | 317 | 20.183 | 63.67 |
© 2018 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Liu, X.; Qi, F.; Ye, W.; Cheng, K.; Guo, J.; Zheng, R. Analysis and Modeling Methodologies for Heat Exchanges of Deep-Sea In Situ Spectroscopy Detection System Based on ROV. Sensors 2018, 18, 2729. https://doi.org/10.3390/s18082729
Liu X, Qi F, Ye W, Cheng K, Guo J, Zheng R. Analysis and Modeling Methodologies for Heat Exchanges of Deep-Sea In Situ Spectroscopy Detection System Based on ROV. Sensors. 2018; 18(8):2729. https://doi.org/10.3390/s18082729
Chicago/Turabian StyleLiu, Xiaorui, Fujun Qi, Wangquan Ye, Kai Cheng, Jinjia Guo, and Ronger Zheng. 2018. "Analysis and Modeling Methodologies for Heat Exchanges of Deep-Sea In Situ Spectroscopy Detection System Based on ROV" Sensors 18, no. 8: 2729. https://doi.org/10.3390/s18082729
APA StyleLiu, X., Qi, F., Ye, W., Cheng, K., Guo, J., & Zheng, R. (2018). Analysis and Modeling Methodologies for Heat Exchanges of Deep-Sea In Situ Spectroscopy Detection System Based on ROV. Sensors, 18(8), 2729. https://doi.org/10.3390/s18082729