Data Feature Analysis of Non-Scanning Multi Target Millimeter-Wave Radar in Traffic Flow Detection Applications

Abstract
:1. Introduction
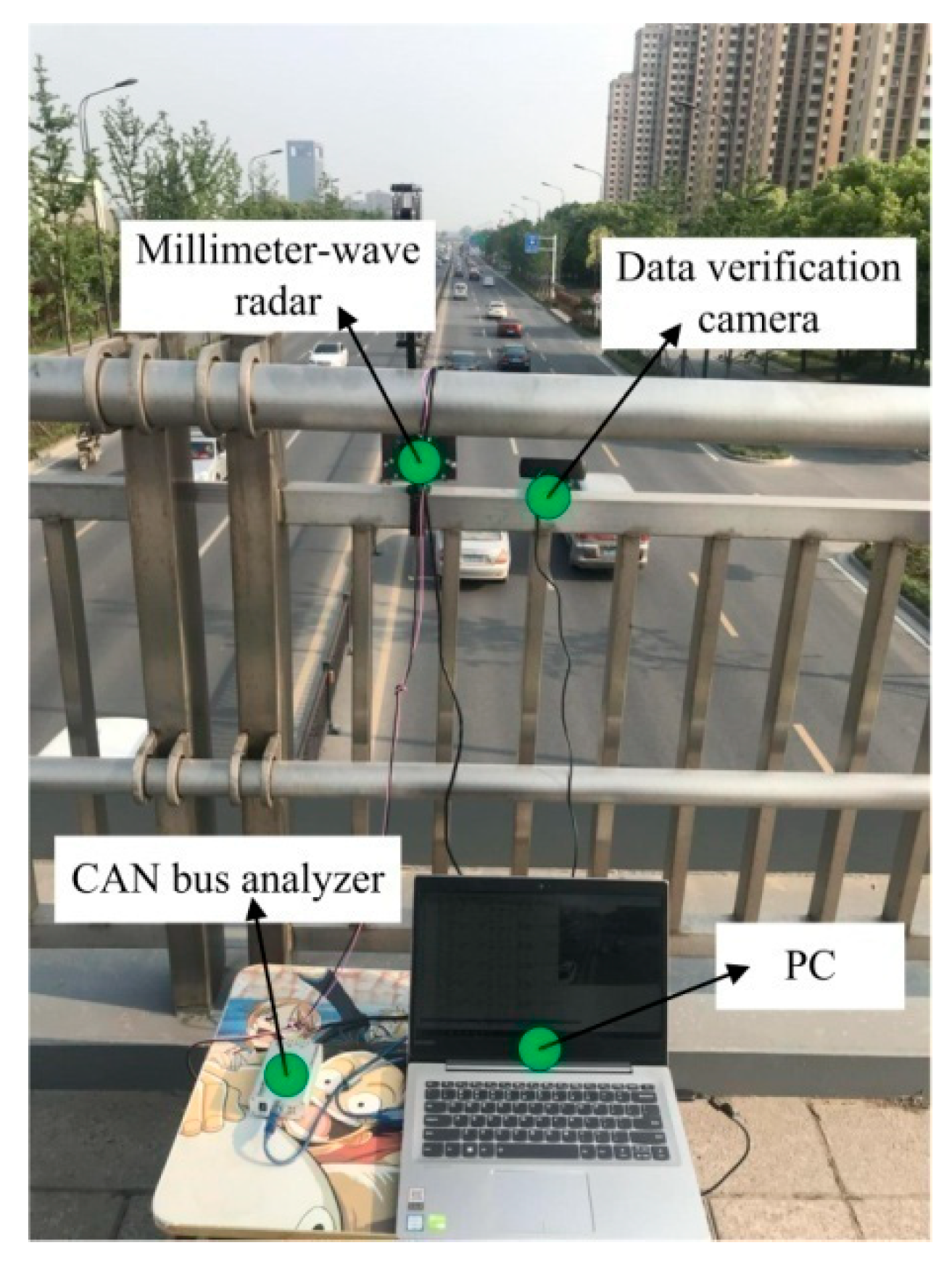
2. Introduction of the Millimeter-Wave Radar and the Experimental Scenario
3. Single Parameter Feature Analysis
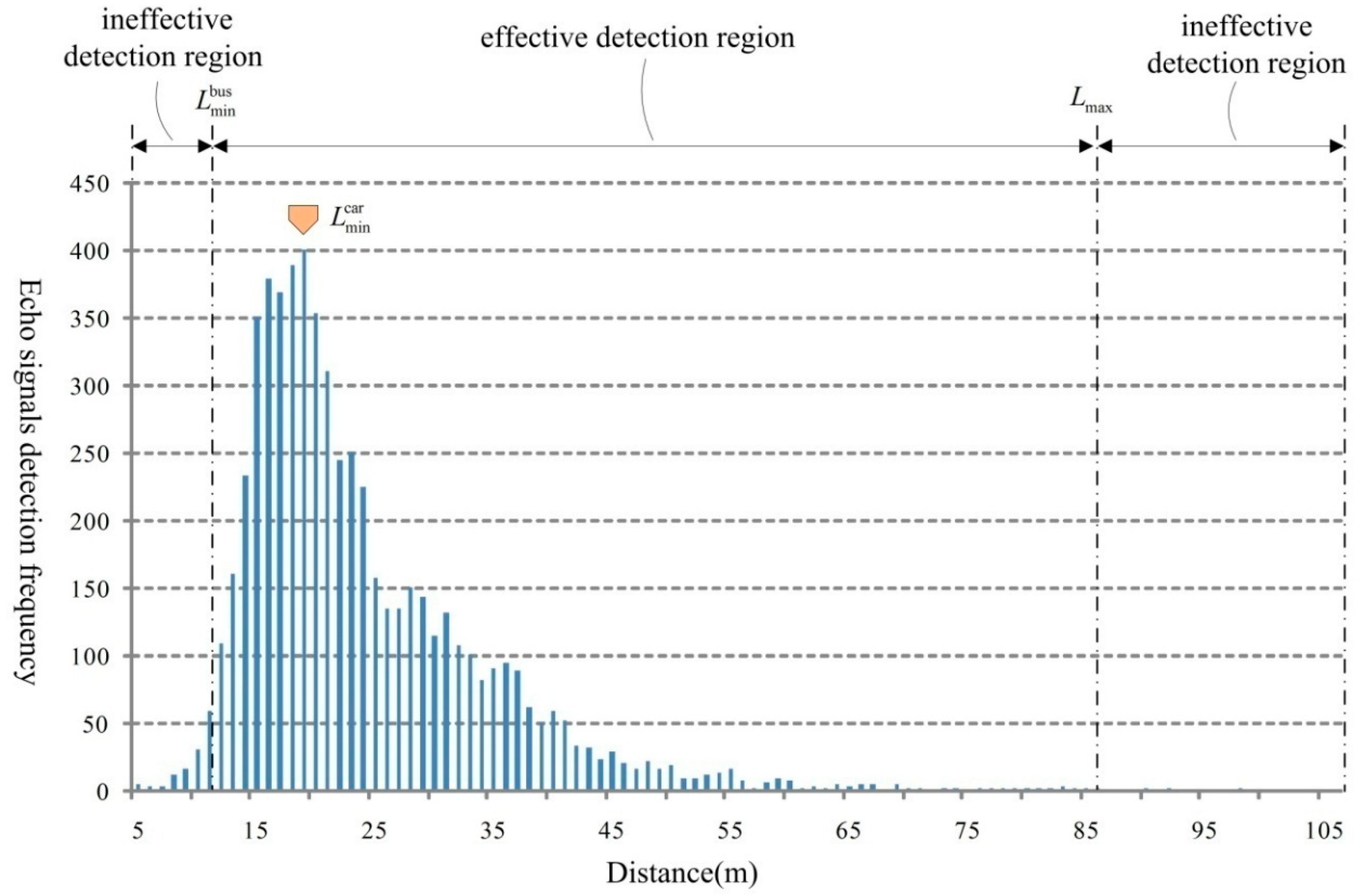
3.1. Sampling Analysis of Distance Values
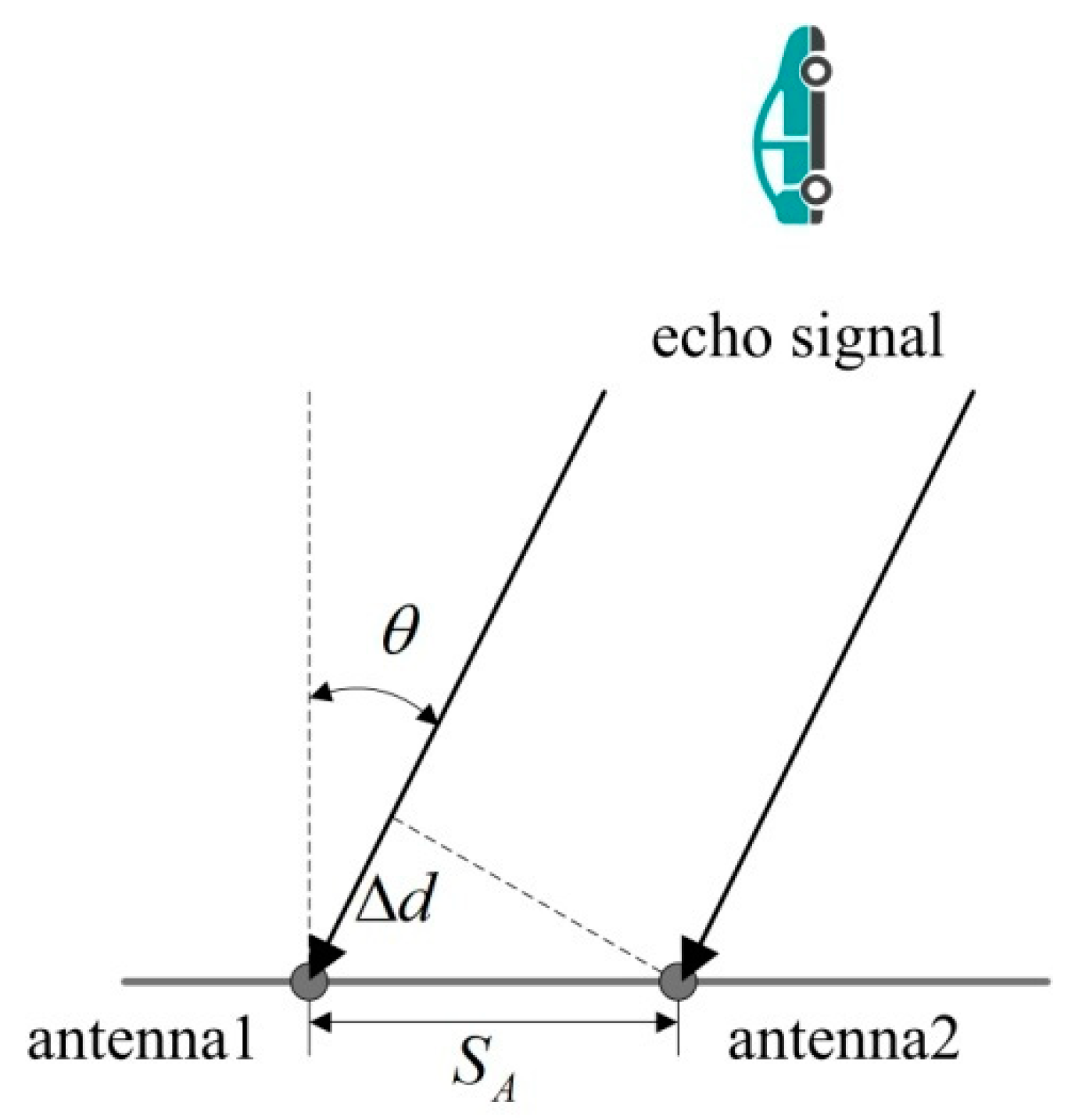
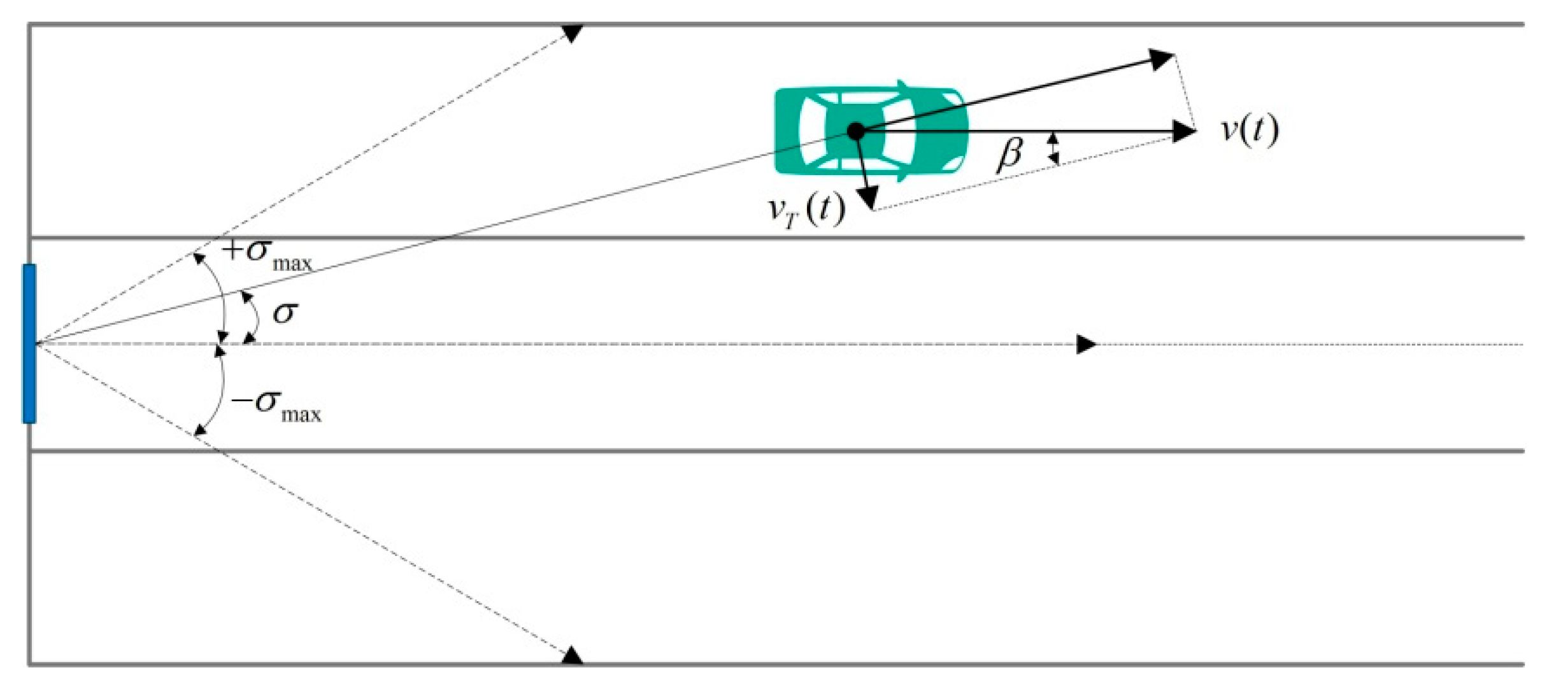
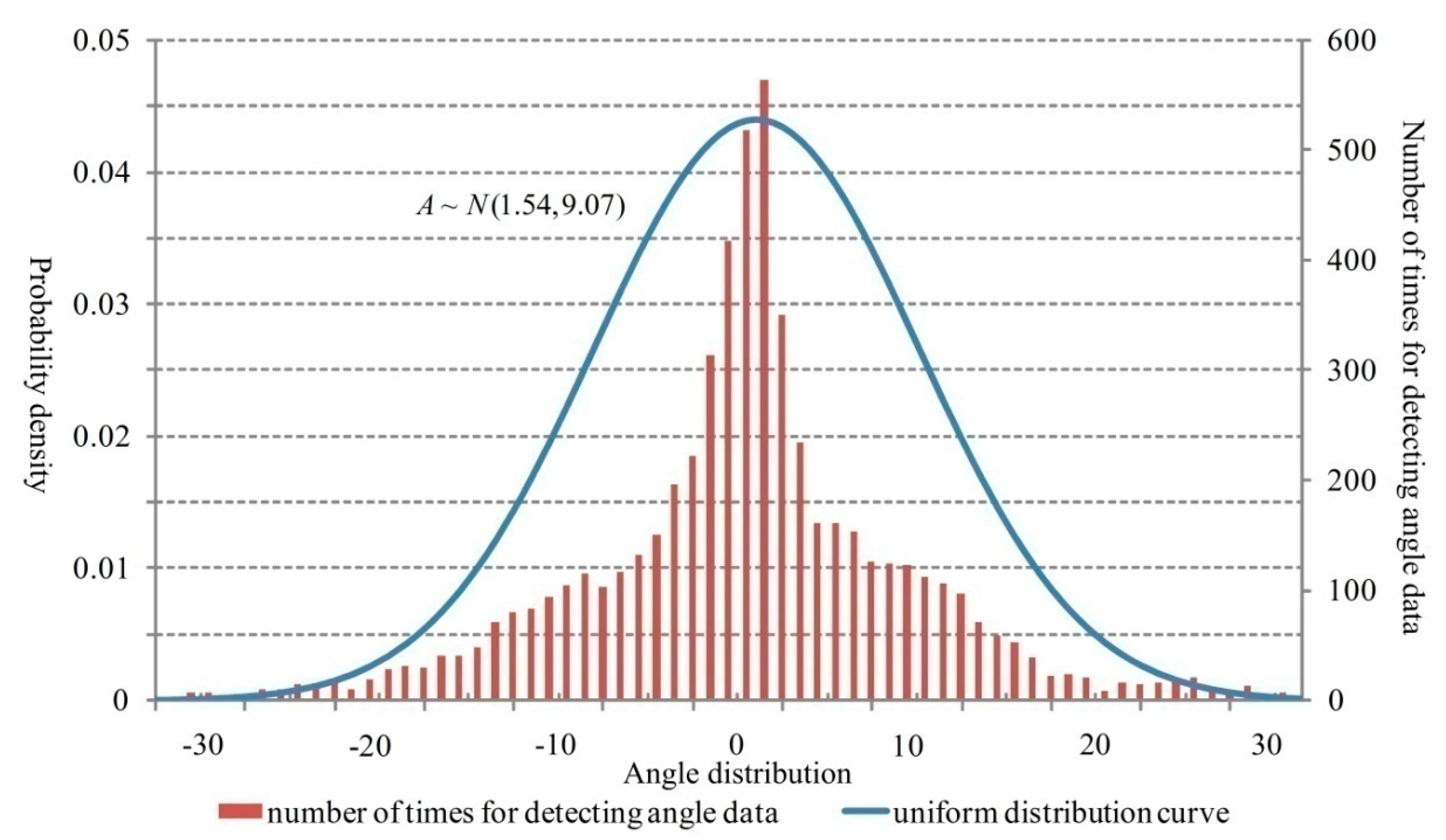
3.2. Sampling Analysis of Angle Values
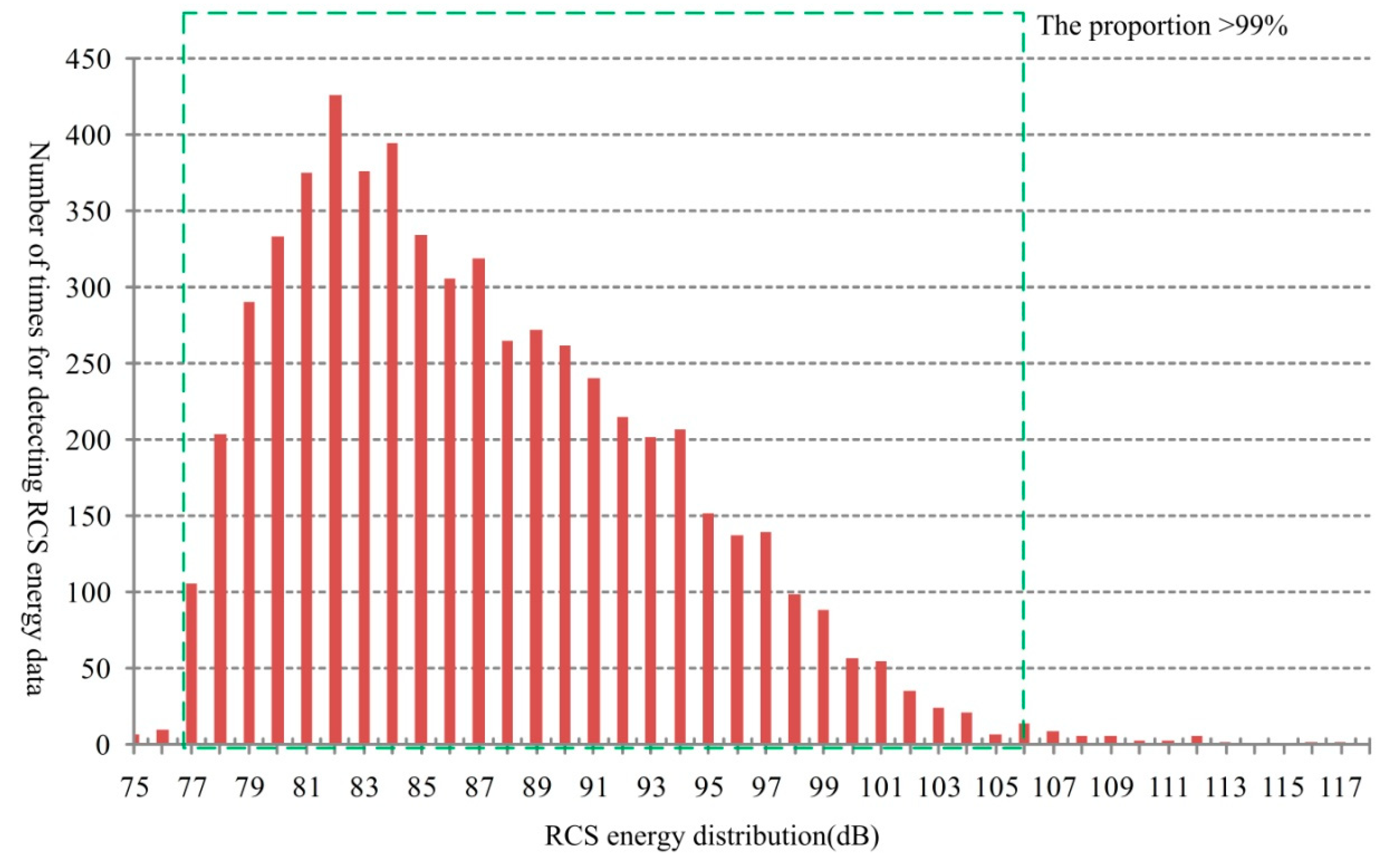
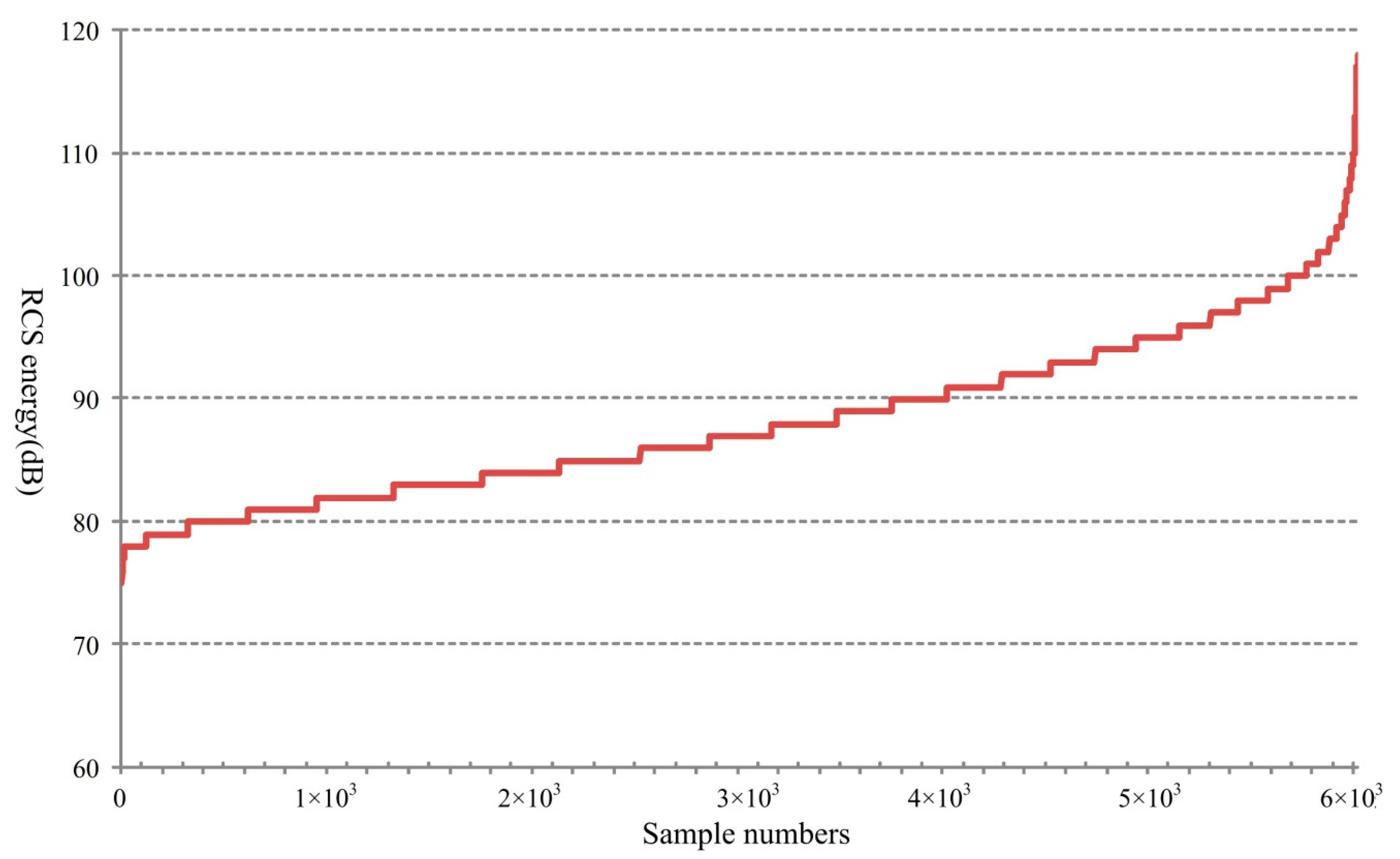
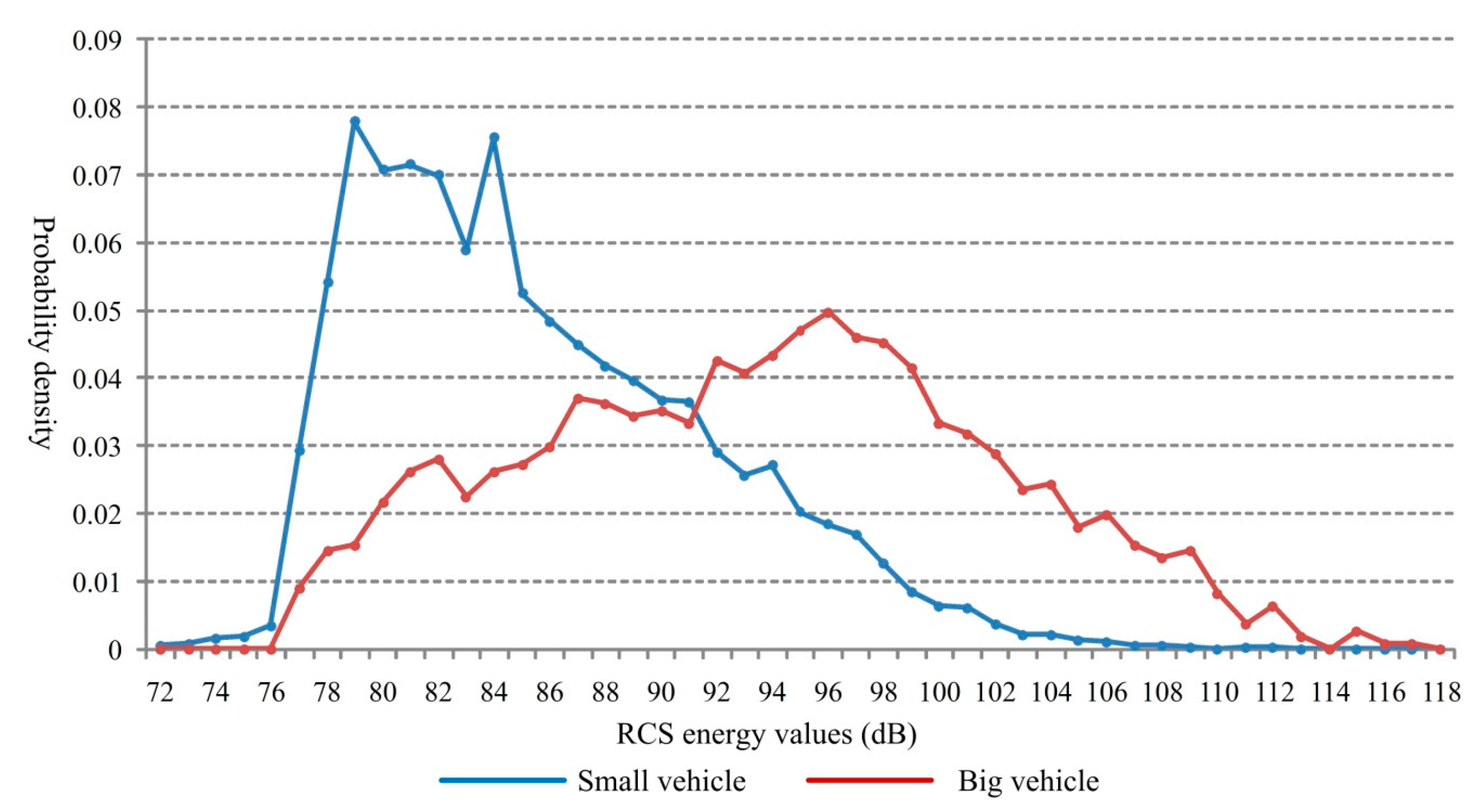
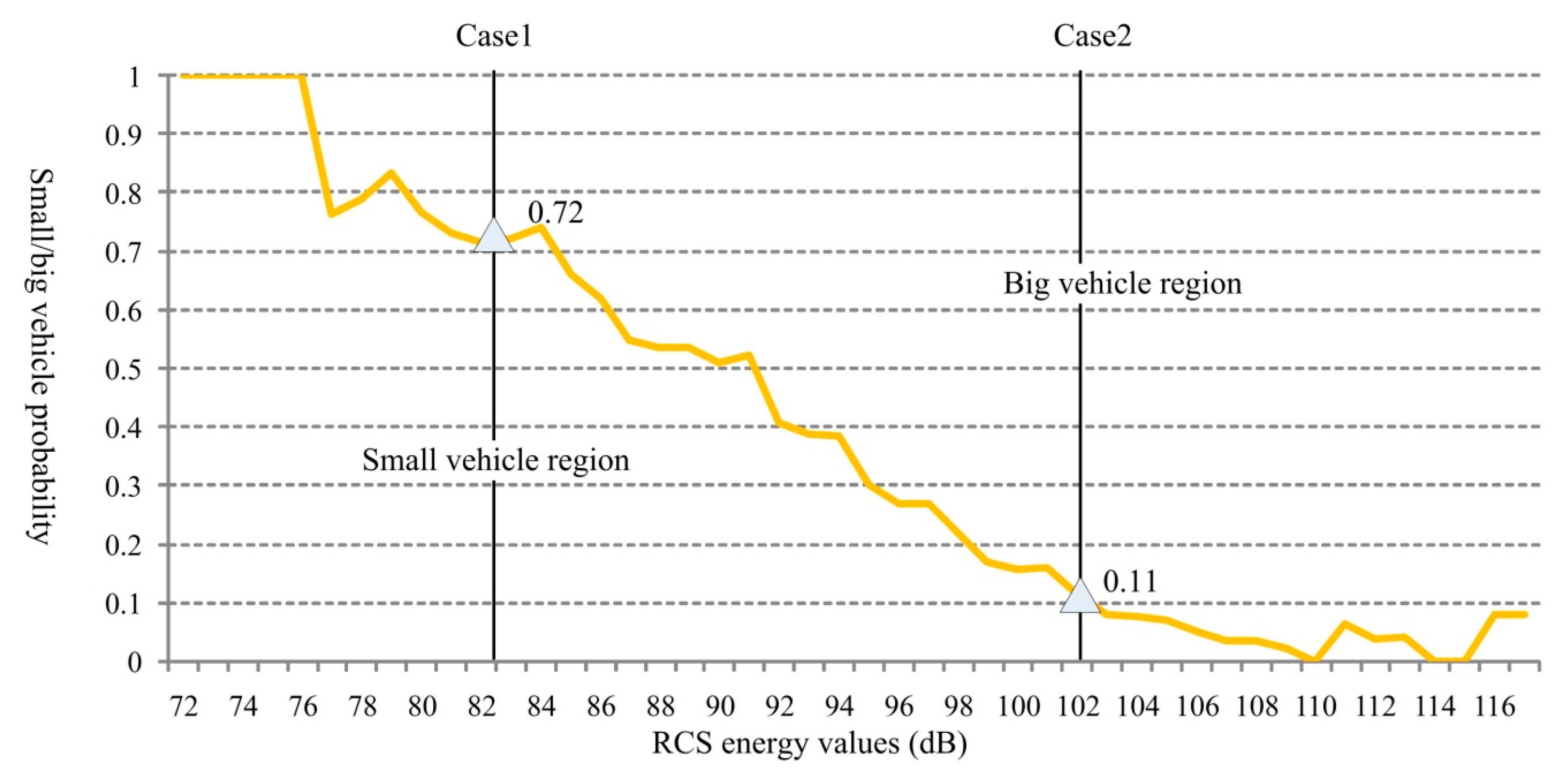
3.3. Sampling Analysis of Radar Cross-Section Energy Values
3.4. Multiple Parameters Analysis
3.4.1. Radar Cross Section Energy Distribution under Different Distances
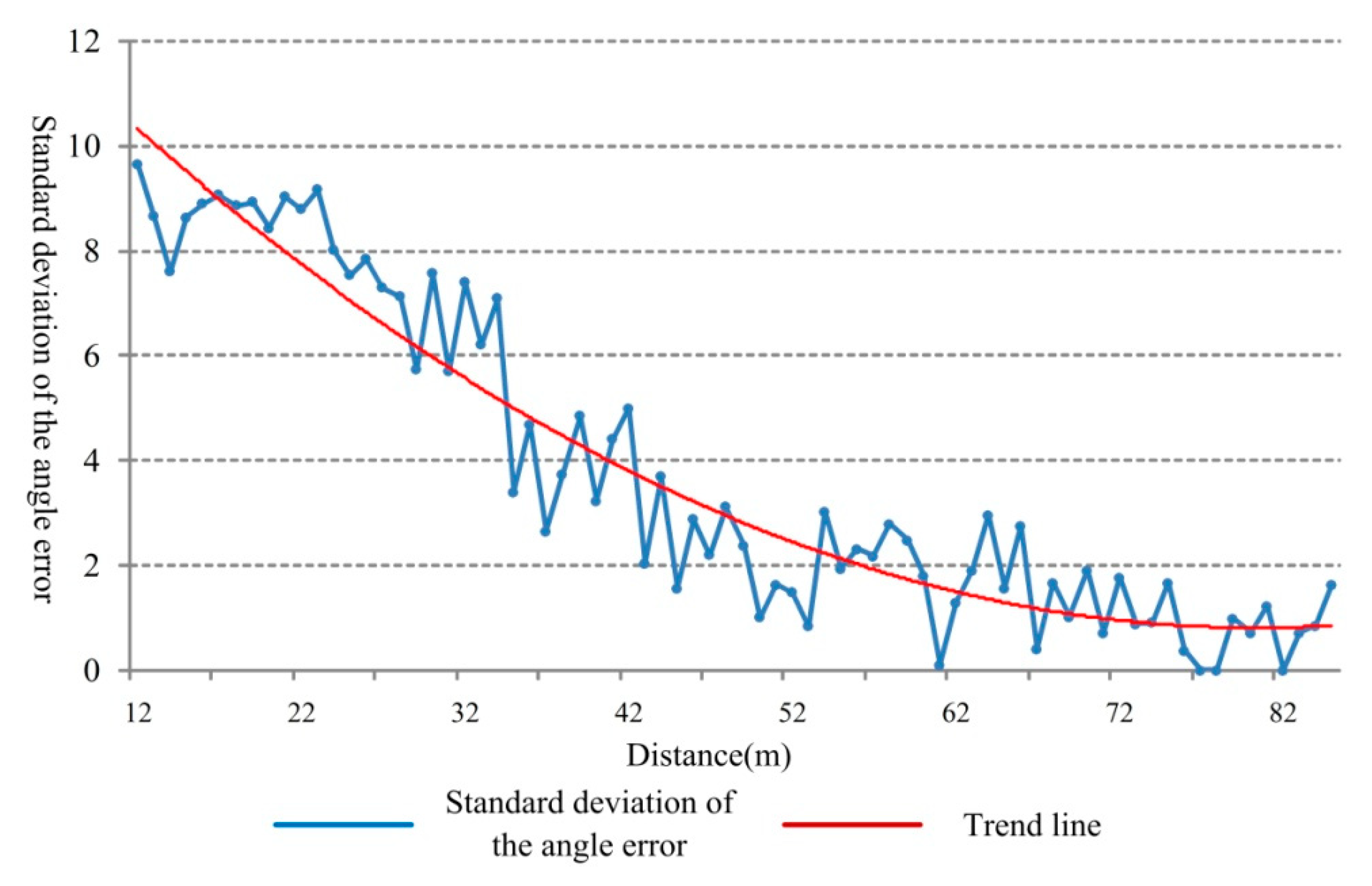
3.4.2. Angle Error Distribution under Different Distances
3.4.3. Angle Error Distribution under Different Radar Cross Section Energy Values
4. The Correlation Analysis for Parameter Series
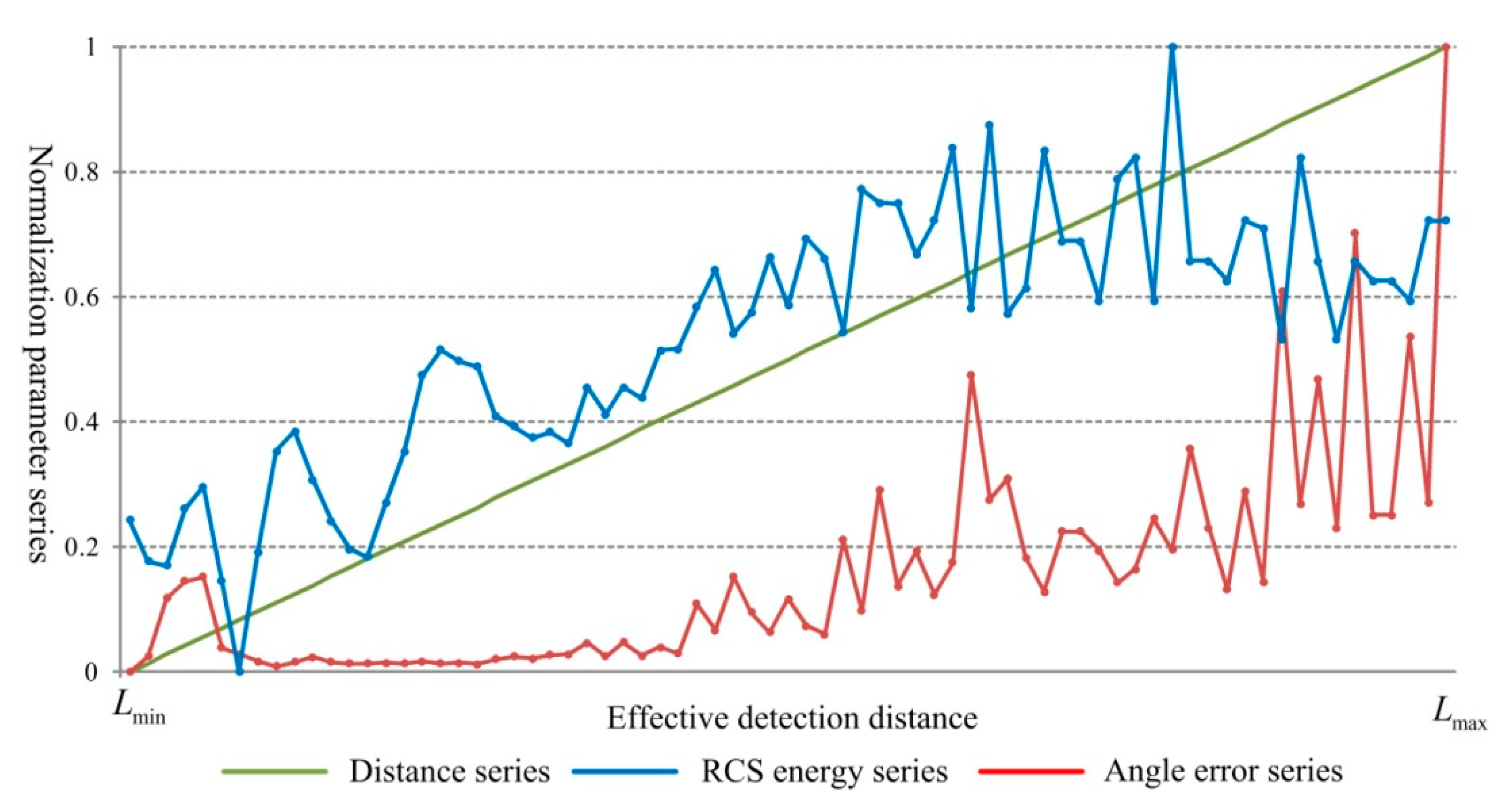
4.1. Correlation Analysis for Multiple Dimension Radar Parameter Series Based on GRA
4.2. Data Analysis
5. Conclusions
- Based on the application scenario, the effective detecting region of the millimeter-wave radar is calculated and further the data sampling characteristics are analyzed in the region. At a certain close range, the sampling is dense and contains more useful information for further research.
- Subject to the antenna performance, there are obvious errors for angle measurement and the errors show certain random characteristics. Hence, the angle information cannot be used alone for further applications, such as lane recognition. In addition, when the RCS energy is high, the angle error is relatively low, which provides a method to combine the RCS energy and the angle information together for corresponding applications.
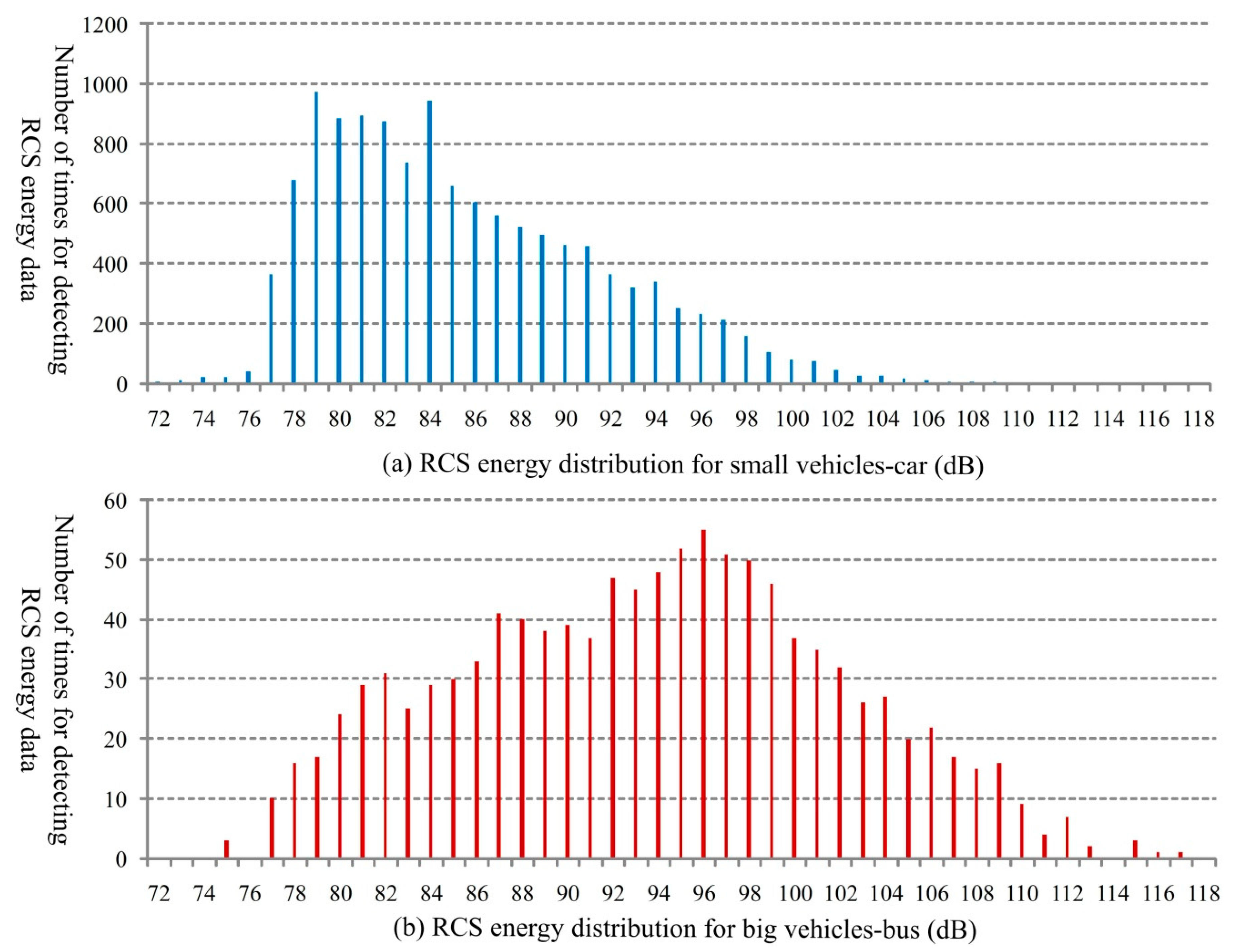
- The RCS energy presents a downward trend as the vehicle moves away from the radar. For different types of vehicles, the RCS energy distributions have certain differences, which can be used for identifying small or big vehicle targets. In this paper, a simple method for target type identification is also proposed.
- Combining with the second item mentioned above, from the point of view of the overall sampling series, the RCS energy presents a much higher correlation degree compared to the angle as the distance increases.
- The data feature analysis for stationary vehicles using the stationary target detection function of the FMCW millimeter-wave radar.
- Further traffic status identification research based on the data features acquired, for example, multi-target trajectories tracking, traffic volume calculation and parking event judgment.
Author Contributions
Funding
Conflicts of Interest
References
- Sanguesa, J.A.; Barrachina, J.; Fogue, M.; Garrido, P.; Martinez, F.J. Sensing traffic density combining V2V and V2I wireless communications. Sensors 2015, 15, 31794–31810. [Google Scholar] [CrossRef] [PubMed]
- Liu, H.Q.; Rai, L.; Wang, J.C.; Ren, C.X. A new approach for real-time traffic delay estimation based on cooperative vehicle-infrastructure system at the signal intersection. Arab. J. Sci. Eng. 2018, 1–13. [Google Scholar] [CrossRef]
- Bie, Y.; Wang, X.; Tony, Z. Online method to impute missing loop detector data for urban free way traffic control. Transp. Res. Rec. 2016, 2593, 37–46. [Google Scholar] [CrossRef]
- Al-Jameel, H.A.E.; Al-Jumaili, M.A.H. Analysis of traffic stream characteristics using loop detector data. Jordan J. Civ. Eng. 2016, 10, 403–416. [Google Scholar]
- Kwon, Y.J.; Kim, D.H.; Choi, K.H. A single node vehicle detection system using an adaptive signal adjustment technique. In Proceedings of the 20th International Symposium on Wireless Personal Multimedia Communications, Bali, Indonesia, 17–20 December 2017; pp. 349–353. [Google Scholar]
- Han, Y.; Gao, M.; Zhang, X.L.; Li, J.; Chen, G. Multi-scale visualization analysis of bus flow average travel speed in Qingdao. IOP Conf. Ser. Earth Environ. Sci. 2016, 46, 12–26. [Google Scholar]
- Sun, C.; Zhang, H.M.; Chen, X.H. Road traffic operation assessment based on multi-source floating car data fusion. Tongji Daxue Xuebao/J. Tongji Univ. 2018, 46, 46–52. (In Chinese) [Google Scholar]
- Gao, Z.; Zhai, R.F.; Wang, P.F.; Yan, X.; Qin, H.L.; Tang, Y.Z.; Ramesh, B. Synergizing appearance and motion with low rank representation for vehicle counting and traffic flow analysis. IEEE Trans. Intell. Transp. Syst. 2018, 19, 2675–2685. [Google Scholar] [CrossRef]
- Du, Y.C.; Zhao, C.; Li, F.; Yang, X.F. An open data platform for traffic parameters measurement via multirotor unmanned aerial vehicles video. J. Adv. Transp. 2017, 2017, 8324301. [Google Scholar] [CrossRef]
- Zhao, H.; Xue, W.; Yu, W.; Sun, X.W. Method of recognizing back ground power spectrum used in millimeter wave traffic flow detection radar. J. Infrared Millim. Waves 2008, 27, 437–441. (In Chinese) [Google Scholar]
- Miyamoto, K.; Nakagawa, Y. 79GHz-band millimeter-wave radar high precision and wide field of view technologies. In Proceedings of the 2014 Asia-Pacific Microwave Conference, Sendai, Japan, 4–7 November 2014; pp. 546–548. [Google Scholar]
- Ho, T.J.; Chung, M.J. An approach to traffic flow detection improvements of non-contact microwave radar detectors. In Proceedings of the 2016 International Conference on Applied System Innovation, Okinawa, Japan, 26–30 May 2016; pp. 26–30. [Google Scholar]
- Ho, T.J.; Chung, M.J. Information-aided smart schemes for vehicle flow detection enhancements of traffic microwave radar detectors. Sensors 2016, 6, 196. [Google Scholar] [CrossRef]
- Shite, K.; Ikeya, T. Vehicle detection in dense traffic using electronic scan millimeter-wave radars. In Proceedings of the ITS World Congress, Tokyo, Japan, 14–18 October 2013. [Google Scholar]
- Tokuhiro, T.; Yokobori, M.; Fukuda, N. Vehicle detection using millimeter-wave radar transmitting orthogonally. In Proceedings of the ITS World Congress, Tokyo, Japan, 14–18 October 2013. [Google Scholar]
- Jia, Y.Z.; Chen, X.W.; Zou, Y.L. A high-precision K-band LFMCW radar for range measurement. In Proceedings of the SPIE—The International Society for Optical Engineering, Changchun, China, 24–28 July 2016; Volume 10141. [Google Scholar]
- Kusmadi; Munir, A. Performance analysis of FMCW-based X-band weather radar. In Proceedings of the 2nd International Conference on Wireless and Telematics, Yogyakarta, Indonesia, 1–2 August 2016; pp. 40–43. [Google Scholar]
- Jiang, W.; Huang, Y.L.; Yang, J.Y. Automatic censoring CFAR detector based on ordered data difference for low-flying helicopter safety. Sensors 2016, 15, 1055. [Google Scholar] [CrossRef] [PubMed]
- Kan, Y.Z.; Zhu, Y.F.; Tang, L.; Fu, Q.; Pei, H.C. FGG-NUFFT-based method for near-field 3-D imaging using millimeter waves. Sensors 2016, 16, 1525. [Google Scholar] [CrossRef] [PubMed]
- Li, C.L.; Chen, W.M.; Liu, G.; Yan, R.; Xu, H.Y.; Qi, Y. A noncontact FMCW radar sensor for displacement measurement in structural health monitoring. Sensors 2015, 15, 7412–7433. [Google Scholar] [CrossRef] [PubMed]
- Hasan, I.; Frank, B.; Christian, W. Polarimetrie RCS analysis of traffic objects. In Proceedings of the 2017 European Radar Conference, Nuremberg, Germany, 11–13 October 2017; pp. 49–52. [Google Scholar]
- Chou, H.T.; Tuan, S.C.; Ho, H.K. Numerical estimation of electro magnetic back scattering from near-zone vehicles for the side-look vehicle-detection radar applications at millimeter waves. In Proceedings of the 2016 Progress in Electromagnetic Research Symposium, Shanghai, China, 8–11 August 2016; pp. 129–133. [Google Scholar]
- Zhang, H.; Yu, W.; Sun, X.W. A novel method for background suppression in millimeter-wave traffic radar sensor. In Proceedings of the 11th International IEEE Conference on Intelligent Transportation Systems, Beijing, China, 12–15 October 2008; pp. 699–704. [Google Scholar]
- Takaaki, K.; Tadashi, M.; Hirohito, M.; Maiko, O.; Yoichi, N. Advanced millimeter-wave radar system to detect pedestrians and vehicles by using coded pulse compression and adaptive array. IEICE Trans. Commun. 2013, E96, 2313–2322. [Google Scholar]
- Liu, G.R.; Wang, L.L.; Zou, S. A radar-based blind spot detection and warning system for driver assistance. In Proceedings of the 2017 IEEE 2nd Advanced Information Technology, Electronic and Automation Control Conference, Chongqing, China, 25–26 March 2017; pp. 2204–2208. [Google Scholar]
- Song, X.S.; Du, Y. Obstacle tracking based on millimeter wave radar. In Proceedings of the 3rd International Conference on System and Informatics, Shanghai, China, 19–21 November 2016; pp. 531–535. [Google Scholar]
- Liu, H.J.; Lai, S.F. Fast square root CKF for automotive millimeter-wave radar target tracking. J. Nanjing Univ. Sci. Technol. 2016, 40, 56–66. (In Chinese) [Google Scholar]
- Du, J.; Song, C.L. A modified millimeter-wave radar multi-target detection algorithm. Commun. Technol. 2015, 46, 808–813. [Google Scholar]
- Wang, T.; Zheng, N.N.; Xin, J.M.; Ma, Z. Integrating millimeter wave radar with a monocular vision sensor for on-road obstacle detection applications. Sensors 2011, 11, 8992–9008. [Google Scholar] [CrossRef] [PubMed]
- Wu, X.; Ren, J.; Wu, Y.J.; Shao, J.W. Study on target tracking based on vision and radar sensor fusion. WCX World Congr. Exp. 2018. [Google Scholar] [CrossRef]
- Segawa, E.; Shiohara, M.; Sasaki, S.; Hashiguchi, N.; Takashima, T.; Tohno, M. Preceding vehicle detection using stereo image sensor and non-scanning millimeter-wave radar. IEICE-Trans. Inf. Syst. 2018, E89-D, 2101–2108. [Google Scholar] [CrossRef]
- Ra, M.; Jung, H.G.; Suhr, J.K.; Kim, W.Y. Part-based vehicle detection in side-rectilinear images for blind-spot detection. Expert Syst. Appl. 2018, 101, 116–128. [Google Scholar] [CrossRef]
- Wang, W.S.; Xi, J.Q.; Zhao, D. Learning and inferring a driver’s braking action in car-following scenarios. IEEE Trans. Veh. Technol. 2018, 67, 3887–3899. [Google Scholar] [CrossRef]
- Oishi, Y.; Matsunami, I. Radar and camera data association algorithm for sensor fusion. IEICE Trans. Fundam. Electron. Commun. Comput. Sci. 2017, 100, 510–514. [Google Scholar] [CrossRef]
- Feng, Y.; Pickering, S.; Chappell, E.; Iravani, P.; Brace, C. Distance estimation by fusing radar and monocular camera with Kalman filter. In Proceedings of the Intelligent & Connected Vehicles Symposium, Warrendale, PA, USA, 26–27 September 2017. [Google Scholar]
- Lv, F. Research on the identification coefficient of relational grade for grey system. Syst. Eng. Theory Pract. 1997, 17, 49–54. (In Chinese) [Google Scholar]







{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Parameter | Value |
|---|---|
| Antenna type | non-scanning |
| Frequency range | 76–77 GHz |
| Distance measurement range | 0–120 m |
| Distance accuracy | ±1 m |
| Velocity measurement range | −70 m/s–+70 m/s |
| Velocity accuracy | ±0.5 m/s |
| Angle detection range | ±30° |
| Pitch angle | ±7° |
| Max measurement target numbers | 32 |
| Detection cycle | 50 ms |
| Parameter | Value |
|---|---|
| Height of the radar | 7.5 m |
| Pitch angle of the radar surface | 12° |
| Number of lanes | 3 |
| Lane width | 3.5 m |
© 2018 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Liu, H.; Li, N.; Guan, D.; Rai, L. Data Feature Analysis of Non-Scanning Multi Target Millimeter-Wave Radar in Traffic Flow Detection Applications. Sensors 2018, 18, 2756. https://doi.org/10.3390/s18092756
Liu H, Li N, Guan D, Rai L. Data Feature Analysis of Non-Scanning Multi Target Millimeter-Wave Radar in Traffic Flow Detection Applications. Sensors. 2018; 18(9):2756. https://doi.org/10.3390/s18092756
Chicago/Turabian StyleLiu, Haiqing, Na Li, Deyong Guan, and Laxmisha Rai. 2018. "Data Feature Analysis of Non-Scanning Multi Target Millimeter-Wave Radar in Traffic Flow Detection Applications" Sensors 18, no. 9: 2756. https://doi.org/10.3390/s18092756