On the Feasibility of Low-Cost Wearable Sensors for Multi-Modal Biometric Verification


Abstract
:1. Introduction
2. Biometrics
2.1. Biometric Verification Systems
2.2. Biometric Signals
2.3. Common Pitfalls in Biometric System Evaluation
3. Low-Cost Sensors for Biometrics
3.1. Sensors
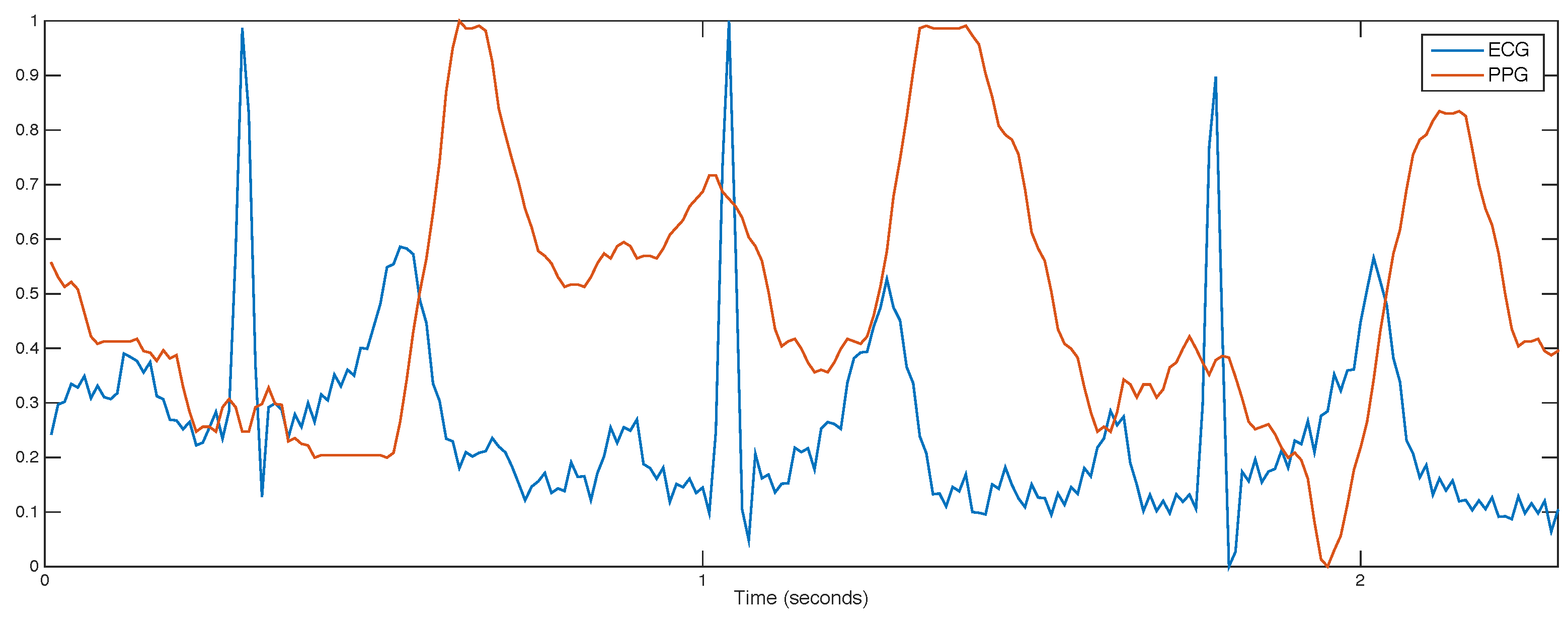
3.1.1. Photoplethysmogram
3.1.2. Electrocardigram
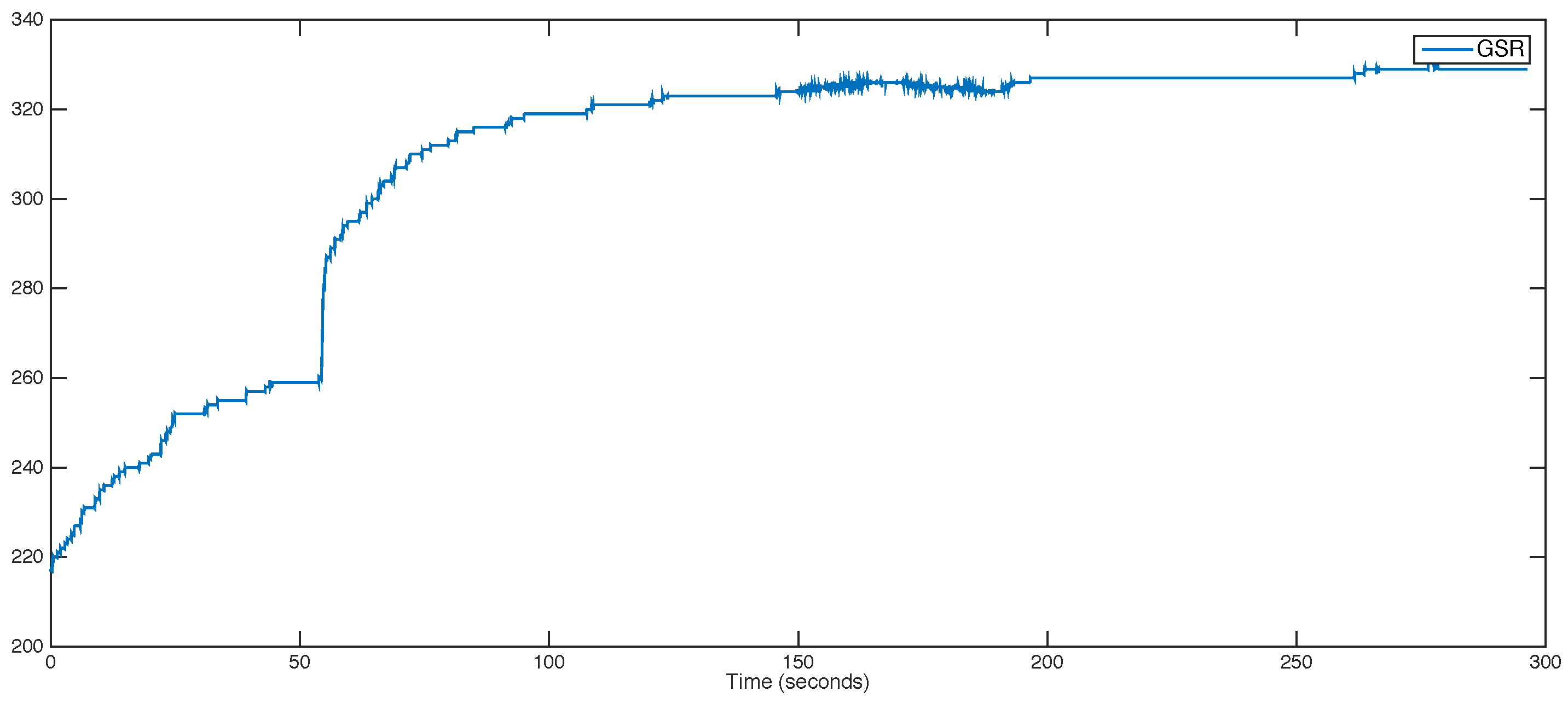
3.1.3. Galvanic Skin Response
3.1.4. Accelerometer
3.2. Signal Processing Unit
3.3. Matching Unit
4. Experiments and Results
4.1. Data Collection
- Sitting for 5 min while touching the second ECG electrode with a finger from their opposite hand. The ACC signal in this activity was discarded, as the participant did not perform any substantial movement.
- Walking for 5 min through a corridor of approximately 15 m. This light exercise was introduced to capture the gait from the wearer and to introduce variations to the heart-based signals. During this activity, the participant was not required to touch the ECG electrode.
- Sitting for 3 min (after the gentle stroll). During this final activity, the subject was asked to repeat the first activity, but for just 3 min. Again, the ACC signal was discarded.
4.2. Scenarios
- Scenario 1 used data from the same activity for training and validation. This is the most widely used experimental setting in biometrics works. To select training samples, we randomly chose a point between the first sample and . Then, we picked all consecutive samples until . This mimics real situations where the system is trained with successive samples [20]. We had two versions of this scenario: (1a) We used data from the first activity. We evaluated the different combinations of ECG, PPG, and GSR for their usage in biometric verification systems; and (1b) We used data from the second activity, evaluating ACC, PPG, and GSR. These scenarios could be combined to create a system that verifies the identity of the wearer in two different situations: sitting and walking.
- Scenario 2 evaluated the distinctiveness and short-permanency of the signals after a light exercise. We used samples from the first activity for training, but performed verification with samples from the third activity. We used ECG, PPG, and GSR signals from both activities and the same training set selection strategy from Scenario 1.
- Scenario 3 evaluated the distinctiveness property when the system was trained with more than one activity. This emulated a scenario where the user regularly updates the system with new samples. Both the training and validation were executed with activities one and three. The training set included random samples from both activities.
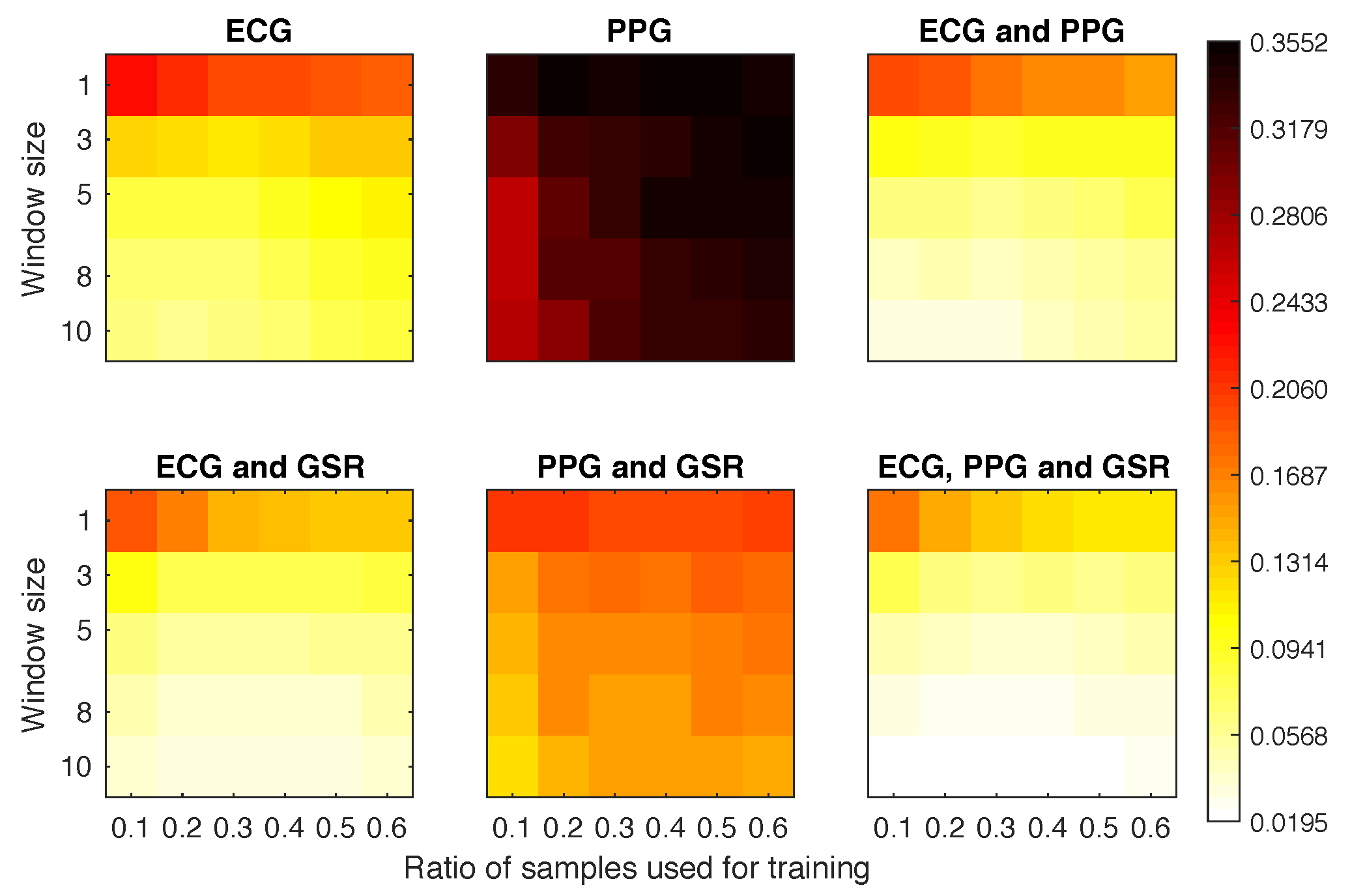
4.3. Experiments
4.4. Results
4.4.1. Scenario 1a
4.4.2. Scenario 1b
4.4.3. Scenario 2
4.4.4. Scenario 3
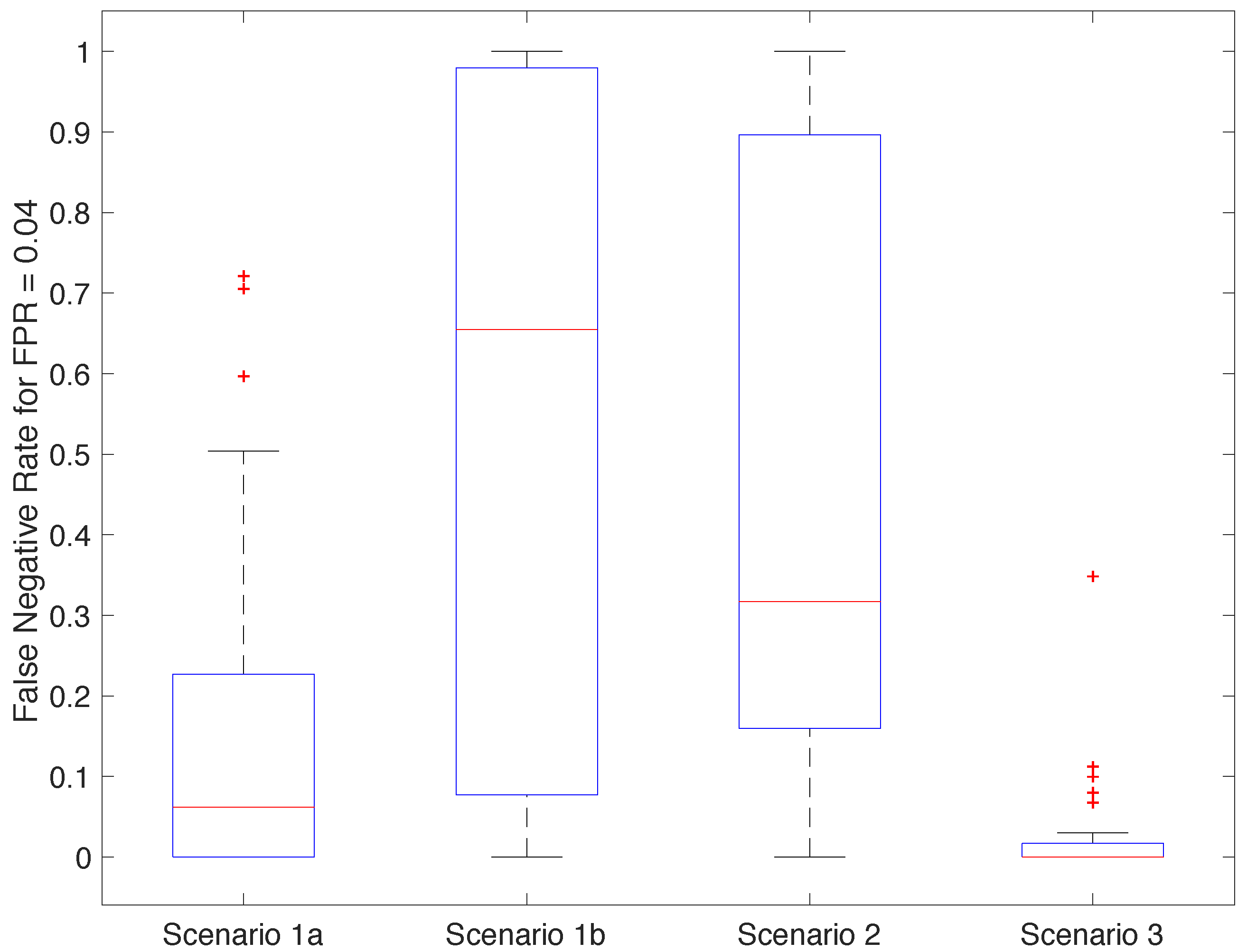
4.5. Comparing Scenarios
5. Discussion
6. Conclusions
Author Contributions
Funding
Acknowledgments
Conflicts of Interest
Appendix A. Area under the Curve (AUC) Results



References
- Chiasson, S.; van Oorschot, P.C.; Biddle, R. A Usability Study and Critique of Two Password Managers. In Proceedings of the 15th conference on USENIX Security Symposium, Vancouver, BC, Canada, 31 July–4 August 2006; Volume 6, pp. 1–16. [Google Scholar]
- Florencio, D.; Herley, C. A Large-scale Study of Web Password Habits. In Proceedings of the 16th International Conference on World Wide Web, Banff, AB, Canada, 8–12 May 2007; ACM: New York, NY, USA, 2007; pp. 657–666. [Google Scholar]
- Srinivas, S.; Balfanz, D.; Tiffany, E. FIDO Universal 2nd Factor (U2F) Overview. Available online: https://fidoalliance.org/specs/fido-u2f-v1.2-ps-20170411/FIDO-U2F-COMPLETE-v1.2-ps-20170411.pdf (accessed on 15 August 2018).
- Lee, P.; Stewart, D.; Barker, J. Deloitte TMT Predictions 2014; Technical Report; Deloitte: New York, NY, USA, 2014. [Google Scholar]
- Hill, C. Wearables—The future of biometric technology? Biom. Technol. Today 2015, 2015, 5–9. [Google Scholar] [CrossRef]
- Šprager, S.; Trobec, R.; Jurič, M.B. Feasibility of biometric authentication using wearable ECG body sensor based on higher-order statistics. In Proceedings of the 40th International Convention on Information and Communication Technology, Electronics and Microelectronics (MIPRO), Opatija, Croatia, 22–26 May 2017; pp. 264–269. [Google Scholar] [CrossRef]
- Blasco, J.; Chen, T.M.; Tapiador, J.; Peris-Lopez, P. A Survey of Wearable Biometric Recognition Systems. ACM Comput. Surv. (CSUR) 2016, 49, 1–43. [Google Scholar] [CrossRef]
- Jain, A.K.; Bolle, R.; Pankanti, S. Biometrics: Personal Identification in Networked Society; Springer: Berlin, Germany, 1999; pp. 1–411. [Google Scholar]
- Zhang, D.; Song, F.; Xu, Y.; Liang, Z. Advanced Pattern Recognition Technologies with Applications to Biometrics; Medical Information Science Reference: Hershey, NY, USA, 2009; pp. 1–384. ISBN 978-1605662008. [Google Scholar]
- Bow, S.T. Pattern Recognition and Image Preprocessing; CRC Press: Cleveland, OH, USA, 2002; pp. 1–720. ISBN 978-0824706593. [Google Scholar]
- Jain, A.; Hong, L.; Pankanti, S. Biometric identification. Commun. ACM 2000, 43, 90–98. [Google Scholar] [CrossRef] [Green Version]
- Jain, A.K.; Ross, A.; Prabhakar, S. An introduction to biometric recognition. IEEE Trans. Circuits Syst. Video Technol. 2004, 14, 4–20. [Google Scholar] [CrossRef] [Green Version]
- Yampolskiy, R.V.; Govindaraja, V. Taxonomy of Behavioral Biometrics. In Behavioral Biometrics for Human Identification; IGI Global: Hershey, PA, USA, 2010; pp. 1–43. [Google Scholar]
- Prabhakar, S.; Pankanti, S.; Jain, A.K. Biometric recognition: Security and privacy concerns. IEEE Secur. Priv. 2003, 1, 33–42. [Google Scholar] [CrossRef]
- Da Silva, H.P.; Fred, A.; Lourenço, A.; Jain, A.K. Finger ECG signal for user authentication: Usability and performance. In Proceedings of the 2013 IEEE Sixth International Conference on Biometrics: Theory, Applications and Systems (BTAS), Arlington, VA, USA, 29 September–2 October 2013; IEEE: Piscataway, NJ, USA, 2013; pp. 1–8. [Google Scholar] [CrossRef] [Green Version]
- Gafurov, D.; Helkala, K.; Søndrol, T. Biometric Gait Authentication Using Accelerometer Sensor. J. Comput. 2006, 1, 1–51. [Google Scholar] [CrossRef]
- Cornelius, C.; Peterson, R.; Skinner, J.; Halter, R.; Kotz, D. A wearable system that knows who wears it. In Proceedings of the 12th Annual International Conference on Mobile Systems, Applications, and Services, Bretton Woods, NH, USA, 16–19 June 2014; pp. 55–67. [Google Scholar] [CrossRef]
- Singh, Y.N.; Singh, S.K.; Gupta, P. Fusion of electrocardiogram with unobtrusive biometrics: An efficient individual authentication system. Pattern Recognit. Lett. 2012, 33, 1932–1941. [Google Scholar] [CrossRef]
- Derawi, M. Wireless chest-based ECG biometrics. In Computer Science and Its Applications; Springer: Berlin, Germany, 2015; pp. 567–579. [Google Scholar]
- Eberz, S.; Rasmussen, K.; Lenders, V.; Martinovic, I. Evaluating Behavioral Biometrics for Continuous Authentication: Challenges and Metrics. In Proceedings of the ACM Asia Conference on Computer and Communications Security (ASIACCS), Abu Dhabi, United Arab Emirates, 2–6 April 2017; ACM: New York, NY, USA, 2017; pp. 386–399. [Google Scholar] [CrossRef]
- Shelley, K.H. Photoplethysmography: Beyond the calculation of arterial oxygen saturation and heart rate. Anesth. Analg. 2007, 105, S31–S36. [Google Scholar] [CrossRef] [PubMed]
- Catalano, J.T. Guide to ECG Analysis; Lippincott Williams & Wilkins: Philadelphia, PA, USA, 2002; pp. 1–512. ISBN 978-0781729307. [Google Scholar]
- Eberz, S.; Paoletti, N.; Roeschlin, M.; Kwiatkowska, M.; Martinovic, I. Broken Hearted: How to Attack ECG Biometrics. In Network and Distributed System Security Symposium 2017; Internet Society: Reston, VA, USA, 2017; pp. 1–15. [Google Scholar]
- Nourbakhsh, N.; Wang, Y.; Chen, F.; Calvo, R.A. Using galvanic skin response for cognitive load measurement in arithmetic and reading tasks. In Proceedings of the 24th Australian Computer-Human Interaction Conference, Melbourne, Australia, 26–30 November 2012; ACM: New York, NY, USA, 2012; pp. 420–423. [Google Scholar] [CrossRef]
- Iworx Systems, I. The Galvanic Skin Response (GSR) and Investigation into Cheating. Available online: http://www.iworx.com/documents/LabExercises/GSR-Investigation.pdf (accessed on 10 August 2018).
- Villarejo, M.V.; Zapirain, B.G.; Zorrilla, A.M. A stress sensor based on Galvanic Skin Response (GSR) controlled by ZigBee. Sensors 2012, 12, 6075–6101. [Google Scholar] [CrossRef] [PubMed]
- Alves, A.P.; Silva, H.; Lourenco, A.; Fred, A.L. BITalino: A biosignal acquisition system based on Arduino. In Proceedings of the 6th Conference on Biomedical Electronics and Devices (BIODEVICES), Barcelona, Spain, 11–14 February 2013. [Google Scholar]
- World Famous Electronics. Pulse Sensor; World Famous Electronics: Boston, MA, USA, 2018. [Google Scholar]
- Allen, J. Photoplethysmography and its application in clinical physiological measurement. Physiol. Meas. 2007, 28, R1–R39. [Google Scholar] [CrossRef] [PubMed]
- FitBit. Charge HR. Available online: https://www.fitbit.com/chargehr (accessed on 15 August 2018).
- Apple. Apple Watch. Available online: http://www.apple.com/watch/ (accessed on 15 August 2018).
- LG. Heart Rate Monitor Earphones. Available online: https://www.lg.com/us/mobile-accessories/lg-FR74-heart-rate-monitor (accessed on 15 August 2018).
- Calleja, A.; Peris-Lopez, P.; Tapiador, J.E. Electrical Heart Signals can be Monitored from the Moon: Security Implications for IPI-Based Protocols. In Proceedings of the 9th IFIP WG 11.2 International Conference on Information Security Theory and Practice (WISTP’15), Crete, Greece, 24–25 August 2015; Springer International Publishing: Cham, Switzerland, 2015; pp. 36–51. [Google Scholar] [CrossRef]
- HeartIn Inc. Smart T-shirt with ECG. Available online: https://www.heartin.net/bbb.html (accessed on 20 August 2018).
- Mills, G.; Homayoun, H. Wrist-Worn ECG Monitor. U.S. Patent 5,289,824A, 13 November 1894. Available online: http://www.google.com/patents/US5289824 (accessed on 10 August 2018).
- Kurniawan, H.; Maslov, A.V.; Pechenizkiy, M. Stress detection from speech and galvanic skin response signals. In Proceedings of the 2013 IEEE 26th International Symposium on Computer-Based Medical Systems (CBMS), Porto, Portugal, 20–22 June 2013; IEEE: Piscataway, NJ, USA, 2013; pp. 209–214. [Google Scholar] [CrossRef]
- Civitello, D.; Finn, D.; Flood, M.; Salievski, E.; Schwarz, M.; Storck, Z. How do physiological responses such as respiratory frequency, heart rate, and galvanic skin response (GSR) change under emotional stress? J. Adv. Stud. Sci. 2014, 1, 1–20. [Google Scholar]
- Hussain, M.; Al-Haiqi, A.; Zaidan, A.; Zaidan, B.; Kiah, M.M.; Anuar, N.B.; Abdulnabi, M. The rise of keyloggers on smartphones: A survey and insight into motion-based tap inference attacks. Pervasive Mob. Comput. 2016, 25, 1–25. [Google Scholar] [CrossRef]
- Wang, H.; Lai, T.T.T.; Roy Choudhury, R. Mole: Motion leaks through smartwatch sensors. In Proceedings of the 21st Annual International Conference on Mobile Computing and Networking, Paris, France, 7–11 September 2015; ACM: New York, NY, USA, 2015; pp. 155–166. [Google Scholar] [CrossRef]
- Mason, J.E.; Traoré, I.; Woungang, I. Gait Biometric Recognition. In Machine Learning Techniques for Gait Biometric Recognition: Using the Ground Reaction Force; Springer International Publishing: Cham, Switzerland, 2016; pp. 9–35. [Google Scholar]
- Thang, H.M.; Viet, V.Q.; Thuc, N.D.; Choi, D. Gait identification using accelerometer on mobile phone. In Proceedings of the International Conference on Control, Automation and Information Sciences (ICCAIS), Ho Chi Minh City, Vietnam, 26–29 November 2012; pp. 344–348. [Google Scholar] [CrossRef]
- Muaaz, M.; Mayrhofer, R. Smartphone-based Gait Recognition: From Authentication to Imitation. IEEE Trans. Mob. Comput. 2017, 16, 3209–3221. [Google Scholar] [CrossRef]
- Camara, C.; Peris-Lopez, P.; Tapiador, J.E. Human Identification Using Compressed ECG Signals. J. Med. Syst. 2015, 39, 1–10. [Google Scholar] [CrossRef] [PubMed]
- Tax, D.M.J. One-Class Classification: Concept Learning in the Absence of Counter-Examples. Ph.D. Thesis, Technische Universiteit Delft, Delft, The Netherlands, 2001. [Google Scholar]
- PhysioNet. PhysioBank. Available online: https://physionet.org/physiobank/ (accessed on 15 August 2018).
- Mordini, E.; Massari, S. Body, biometrics and identity. Bioethics 2008, 22, 488–498. [Google Scholar] [CrossRef] [PubMed]













{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Signals | Features |
|---|---|
| , | |
| , | |
| , | |
| , , , |
| Ord. | Act. | Dur. | Signals | # Samples |
|---|---|---|---|---|
| 1 | Sitting | 5 min | ECG, PPG, GSR | |
| 2 | Walking | 5 min | PPG, ACC, GSR | |
| 3 | Sitting | 3 min | ECG, PPG, GSR |
| Scenario | Train | Test | Signals |
|---|---|---|---|
| 1a | Activity 1 | Activity 1 | ECG, PPG, GSR |
| 1b | Activity 2 | Activity 2 | ACC, PPG, GSR |
| 2 | Activity 1 | Activity 3 | ECG, PPG, GSR |
| 3 | Activities 1 and 3 | Activities 1 and 3 | ECG, PPG, GSR |
| Scenario | Features | Train | Window Size | AUC | EER |
|---|---|---|---|---|---|
| 1a | ECG, PPG, GSR | 60% | 10 | 0.982 | 0.053 |
| 2b | ACC and GSR | 30% | 10 | 0.937 | 0.107 |
| 2 | ECG and GSR | 40% | 10 | 0.966 | 0.079 |
| 3 | ECG, PPG, GSR | 30% | 10 | 0.996 | 0.019 |
© 2018 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Blasco, J.; Peris-Lopez, P. On the Feasibility of Low-Cost Wearable Sensors for Multi-Modal Biometric Verification. Sensors 2018, 18, 2782. https://doi.org/10.3390/s18092782
Blasco J, Peris-Lopez P. On the Feasibility of Low-Cost Wearable Sensors for Multi-Modal Biometric Verification. Sensors. 2018; 18(9):2782. https://doi.org/10.3390/s18092782
Chicago/Turabian StyleBlasco, Jorge, and Pedro Peris-Lopez. 2018. "On the Feasibility of Low-Cost Wearable Sensors for Multi-Modal Biometric Verification" Sensors 18, no. 9: 2782. https://doi.org/10.3390/s18092782
APA StyleBlasco, J., & Peris-Lopez, P. (2018). On the Feasibility of Low-Cost Wearable Sensors for Multi-Modal Biometric Verification. Sensors, 18(9), 2782. https://doi.org/10.3390/s18092782