A Combined
H
2
/
H
∞
Approach for Robust Joint Actuator and Sensor Fault Estimation: Application to a DC Servo-Motor System




Abstract
1. Introduction
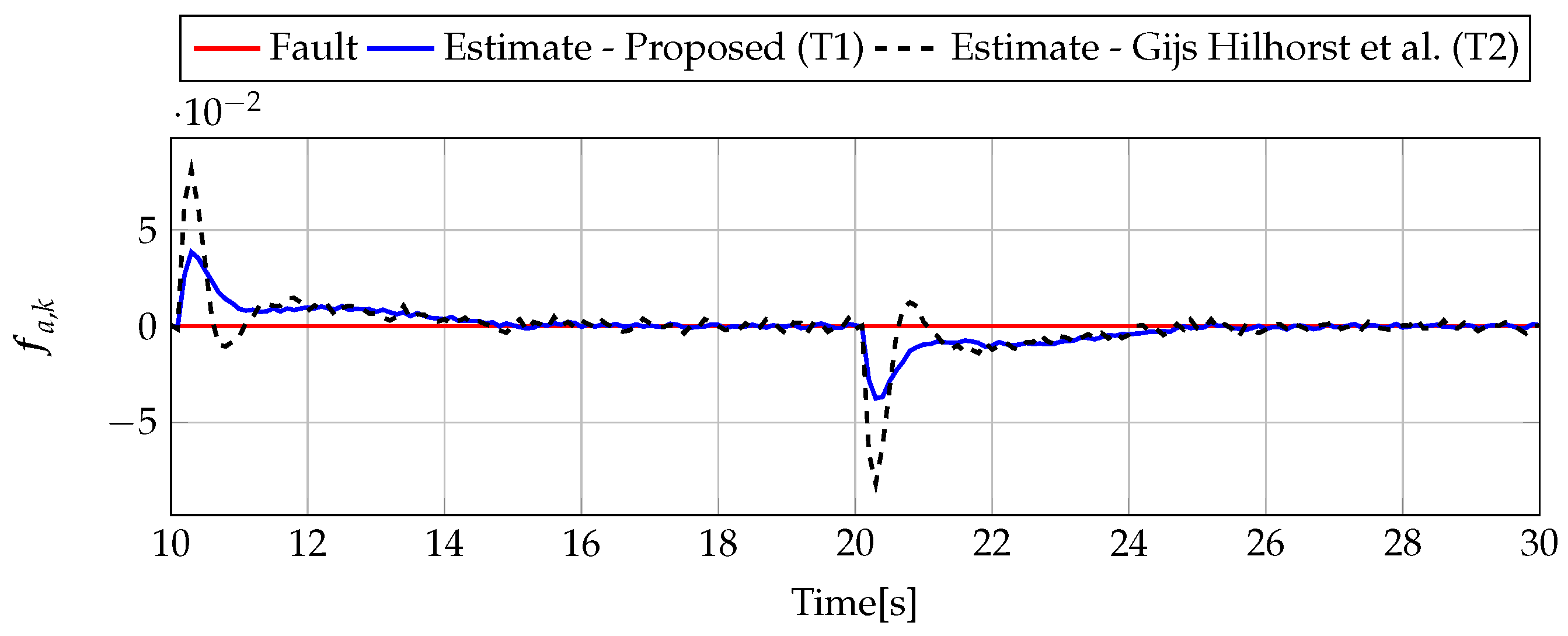
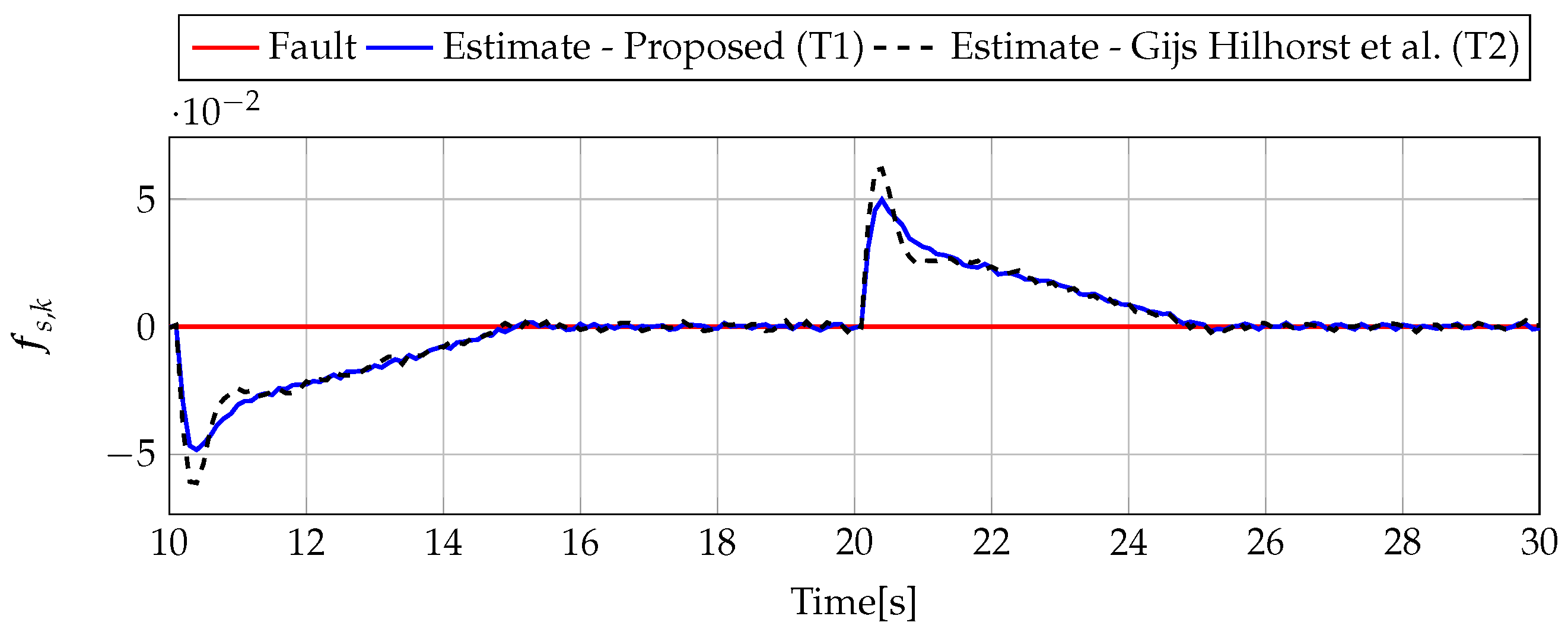
- to propose a novel fault estimator structure capable of estimating possibly simultaneous sensor and actuator faults;
- the proposed estimator can tackle both an exogenous process disturbance with finite energy and a random measurement noise;
- the estimator design procedure allows the minimizing of noise/disturbance effects on both state and fault estimation errors;
- the estimator design procedure yields a fault estimator with a guaranteed trade-off between fault and state estimation quality.
2. Preliminaries
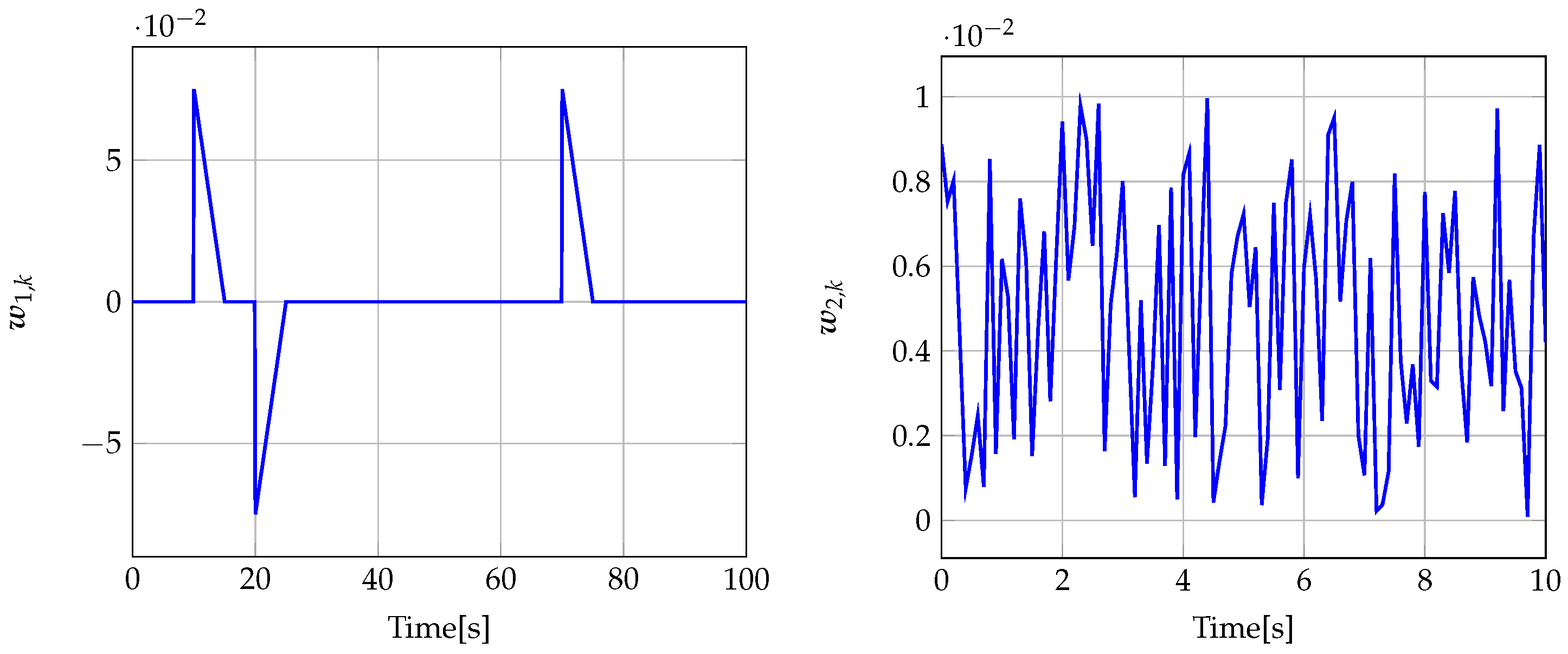
- Assumption 1: The process of exogenous disturbance is bounded in the sense, i.e., ;
- Assumption 2: The measurement noise is a random sequence;
- Assumption 3: Actuator and sensor faults’ rates of change , are bounded in the and sense, i.e., and , respectively.
3. Problem Formulation
4. Fault Estimator Design
5. An Alternative Approach to Fault Estimator Design
6. Final Design Procedure of the Fault Estimation Scheme
- Offline computation:
- Iteratively change the values of and .
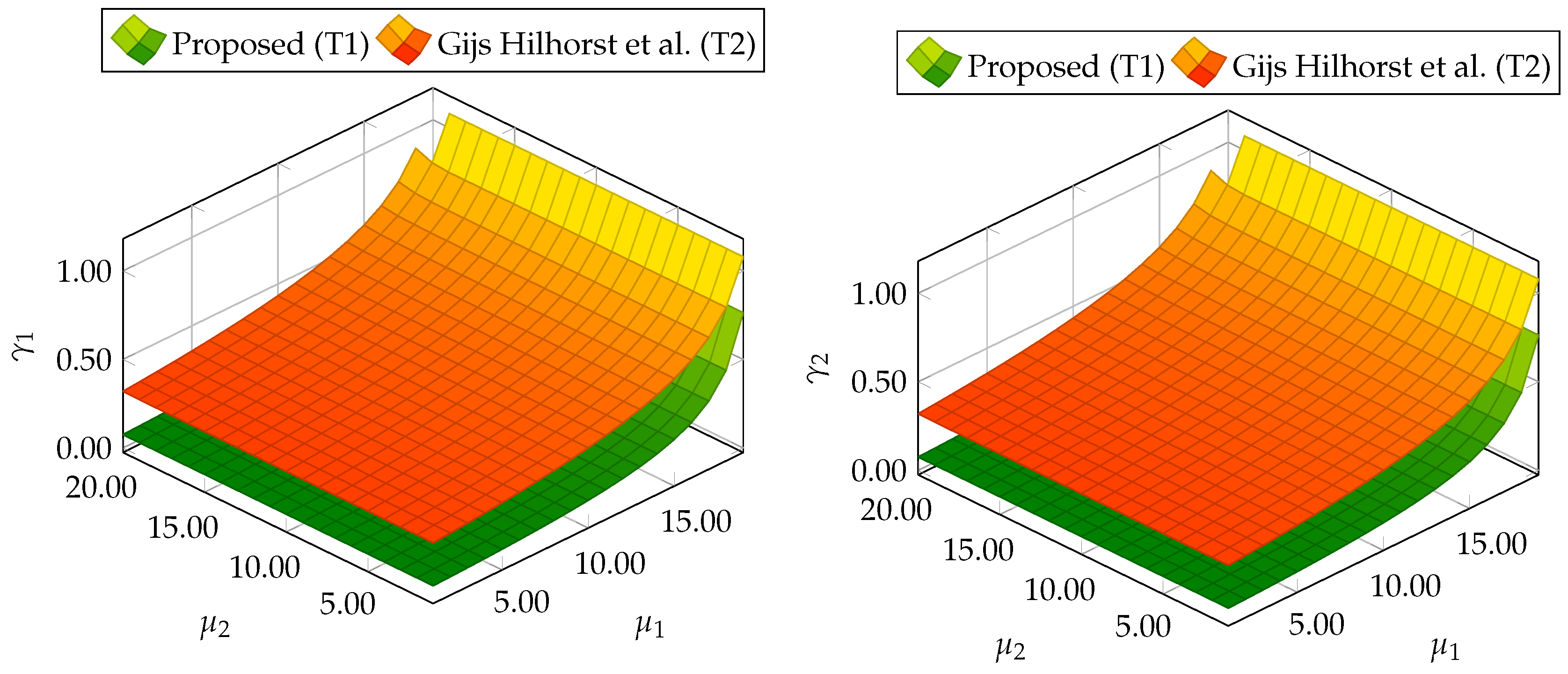
- Solve the optimization problemto find a trade-off between disturbance attenuation levels , , , and , where and .
- If the attenuation levels are not satisfactory, then go to Step 1, or else obtain matrices and and calculate:
- Online computation:
7. Illustrative Examples
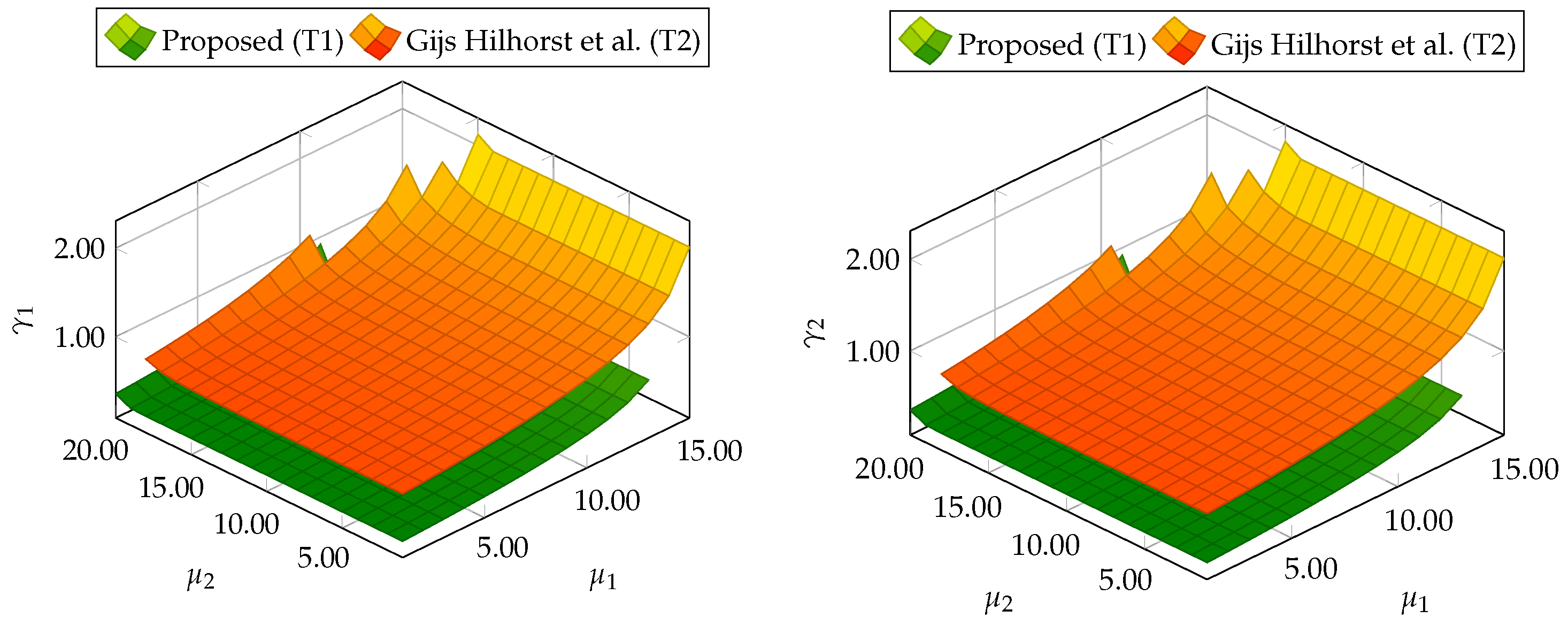
7.1. Analysis of Trade-off—DC Servo-Motor
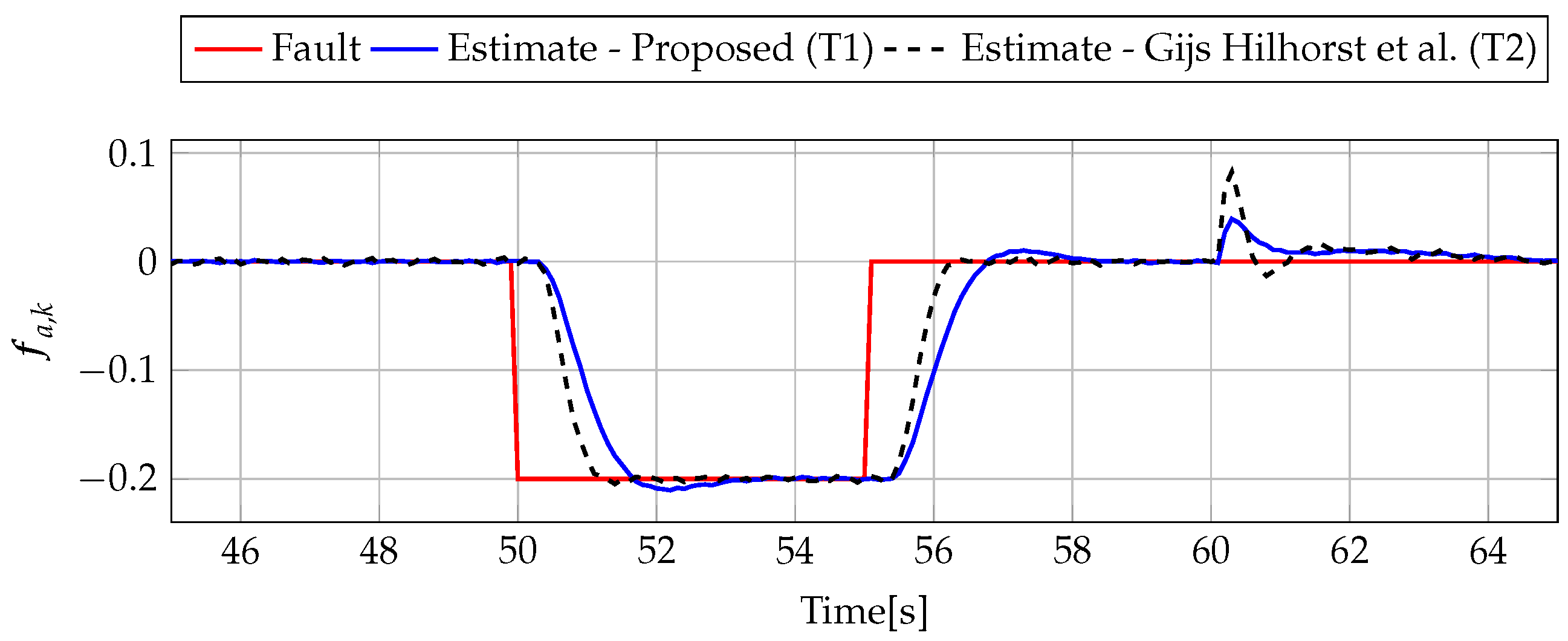
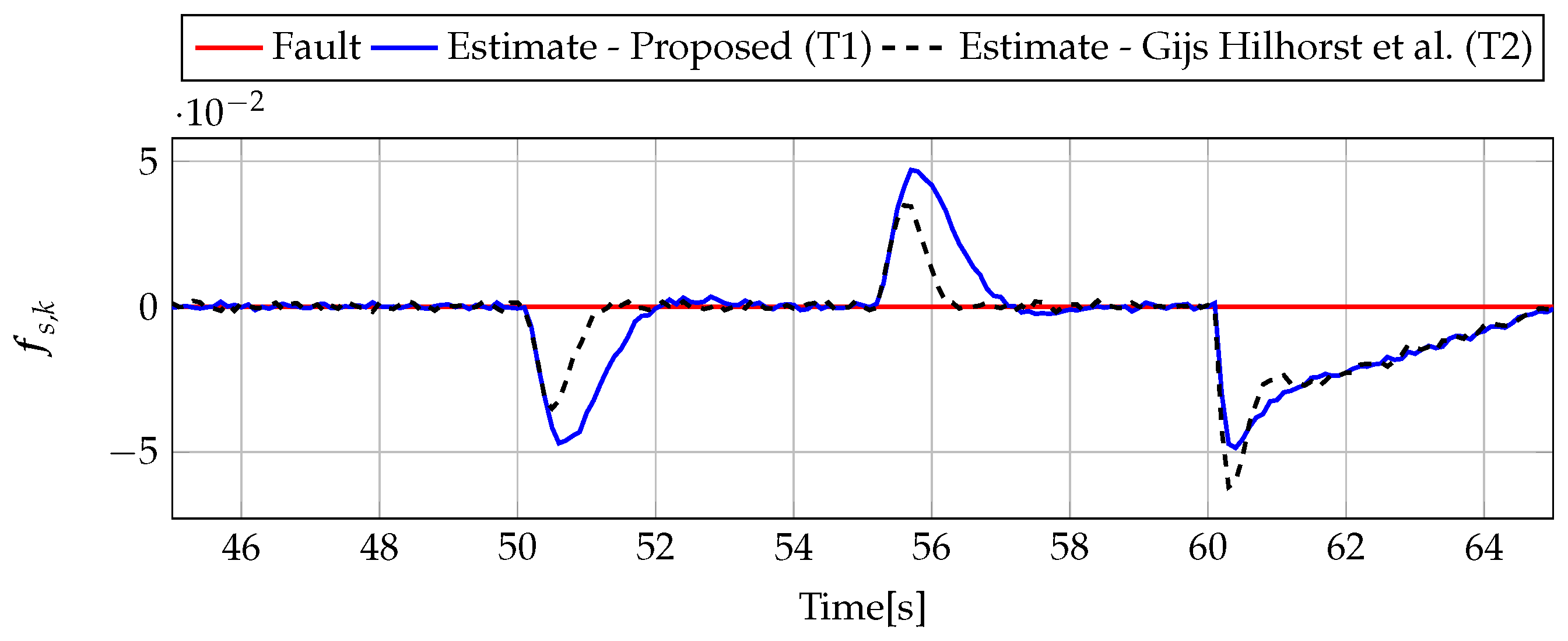
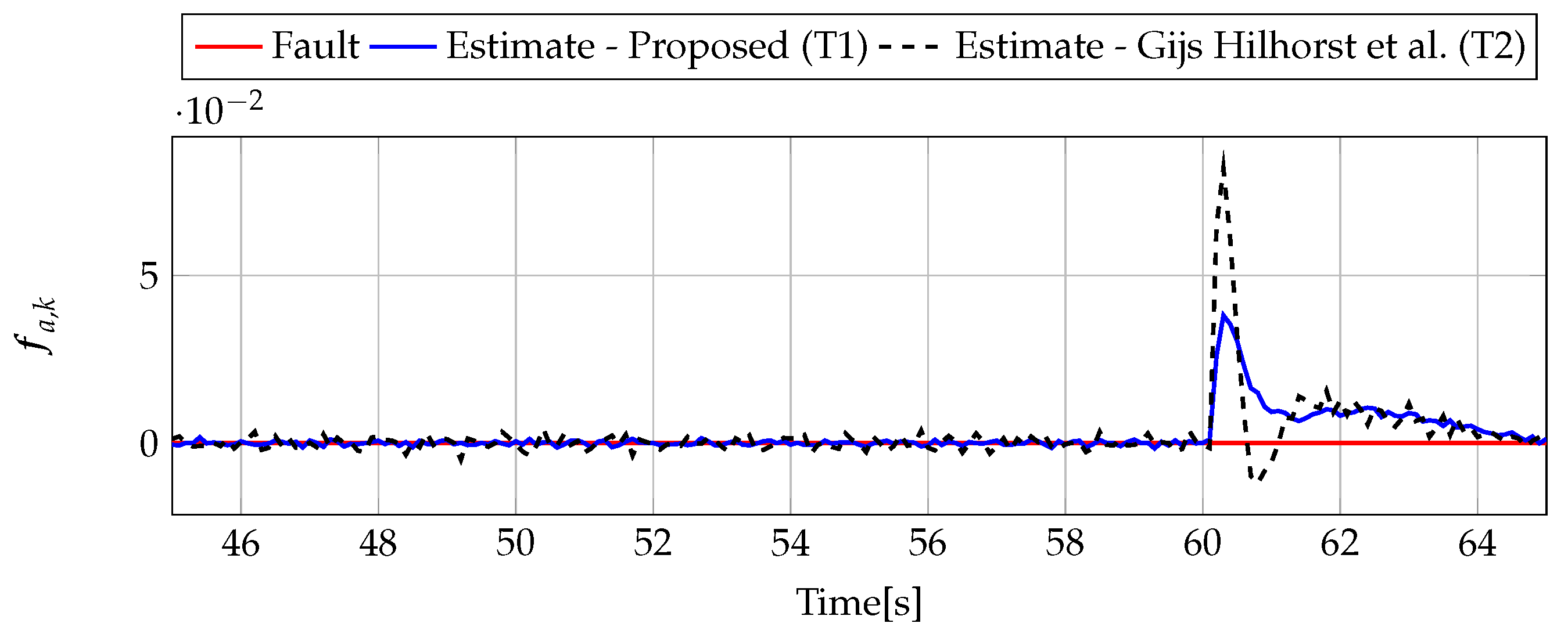
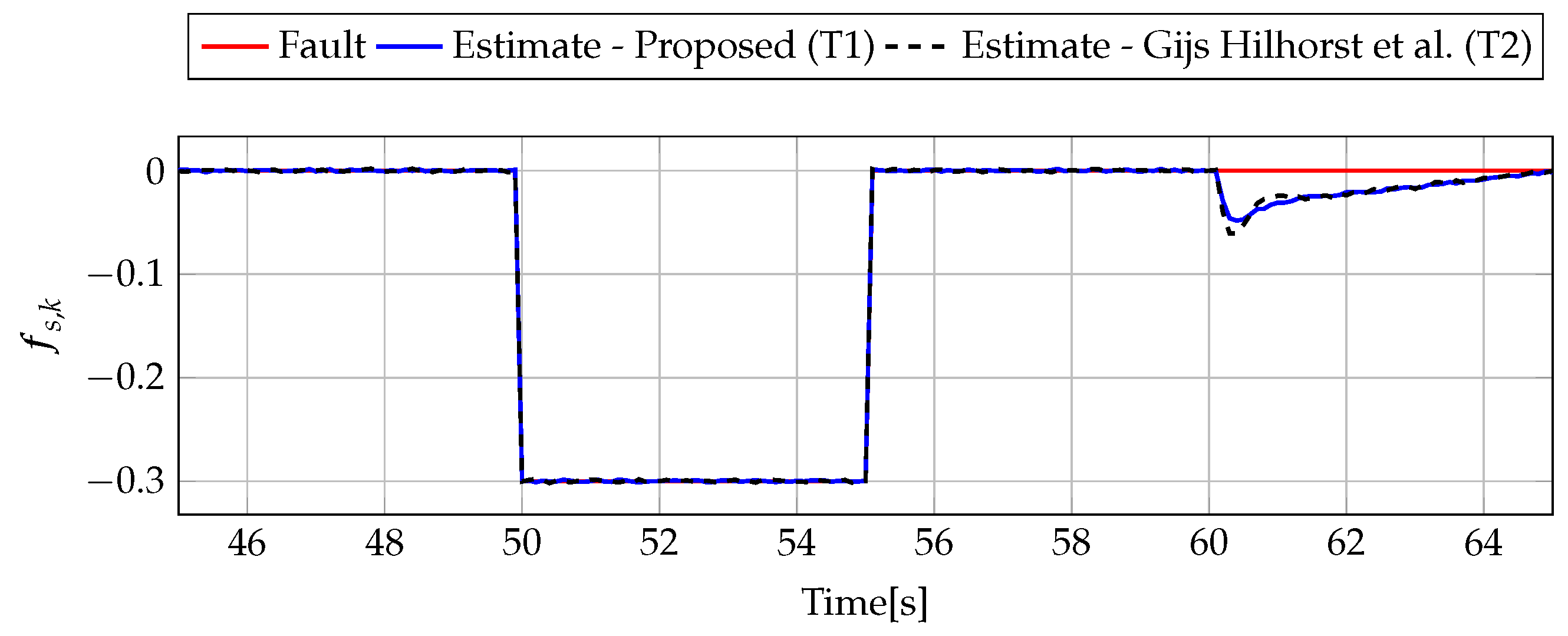
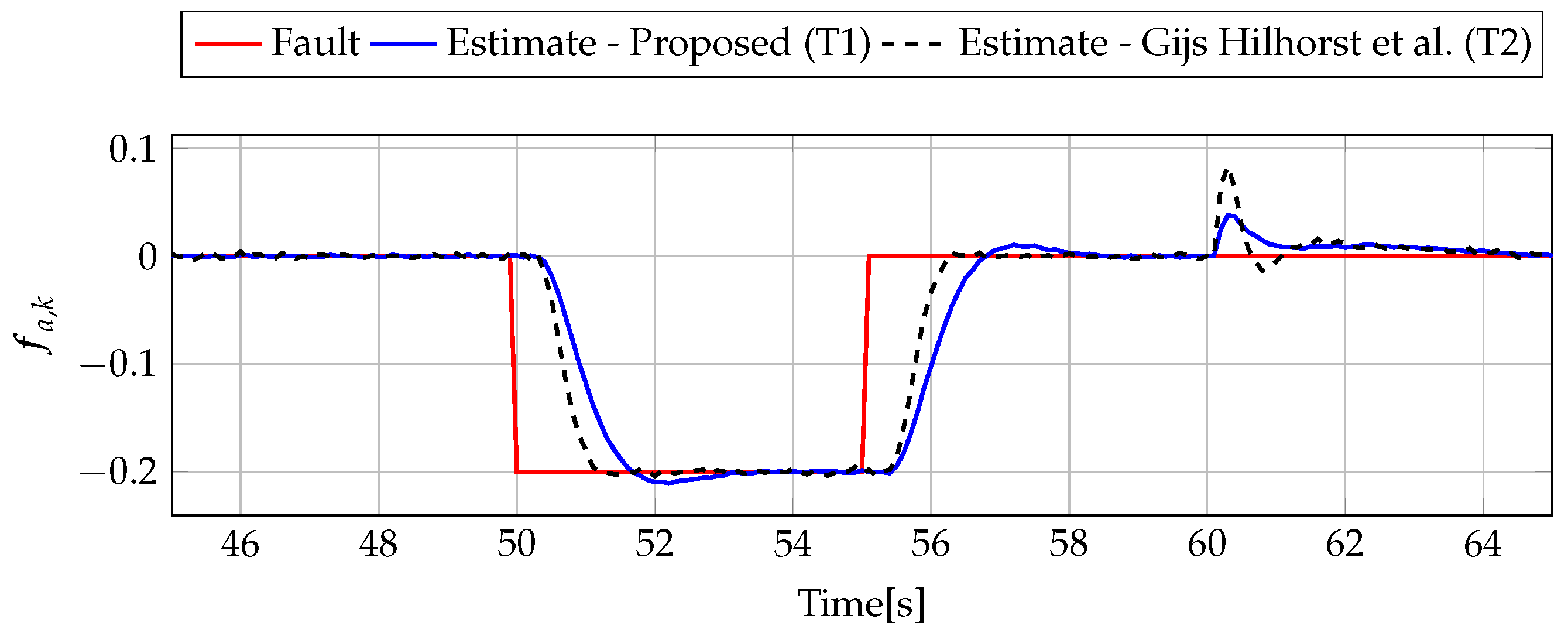
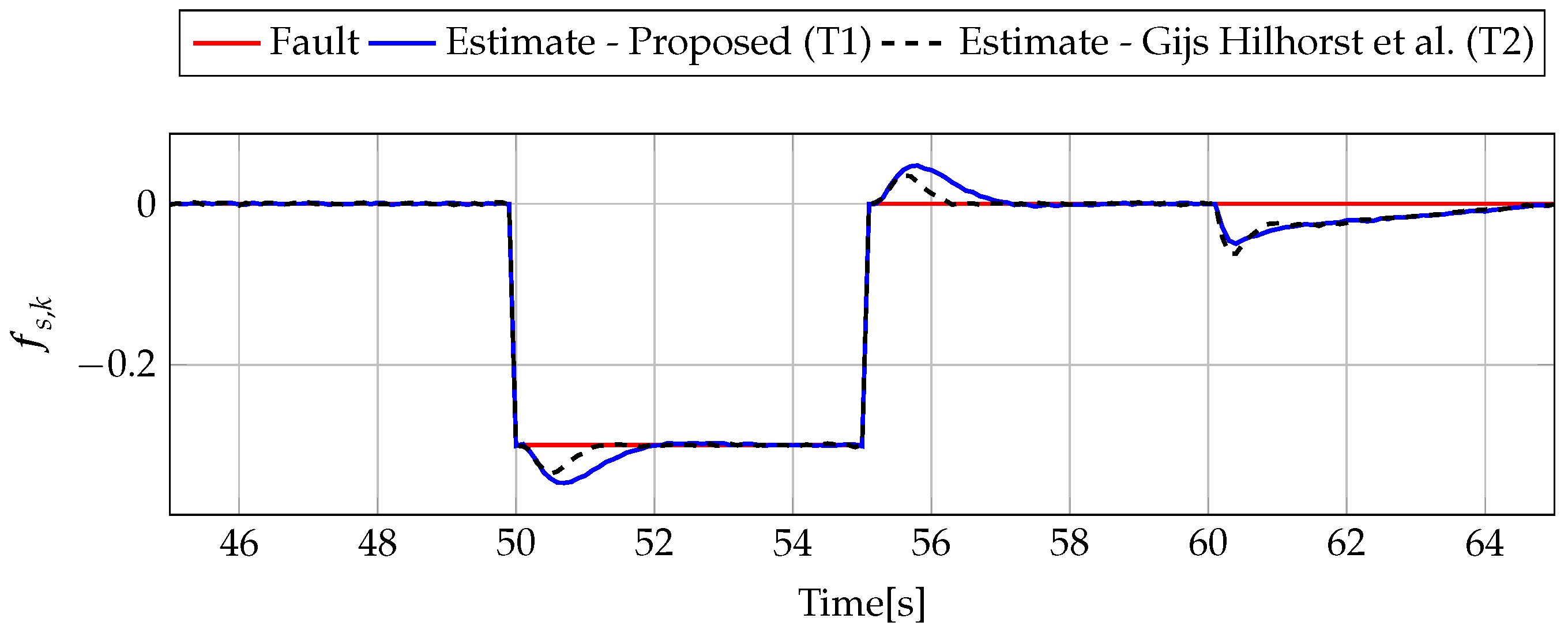
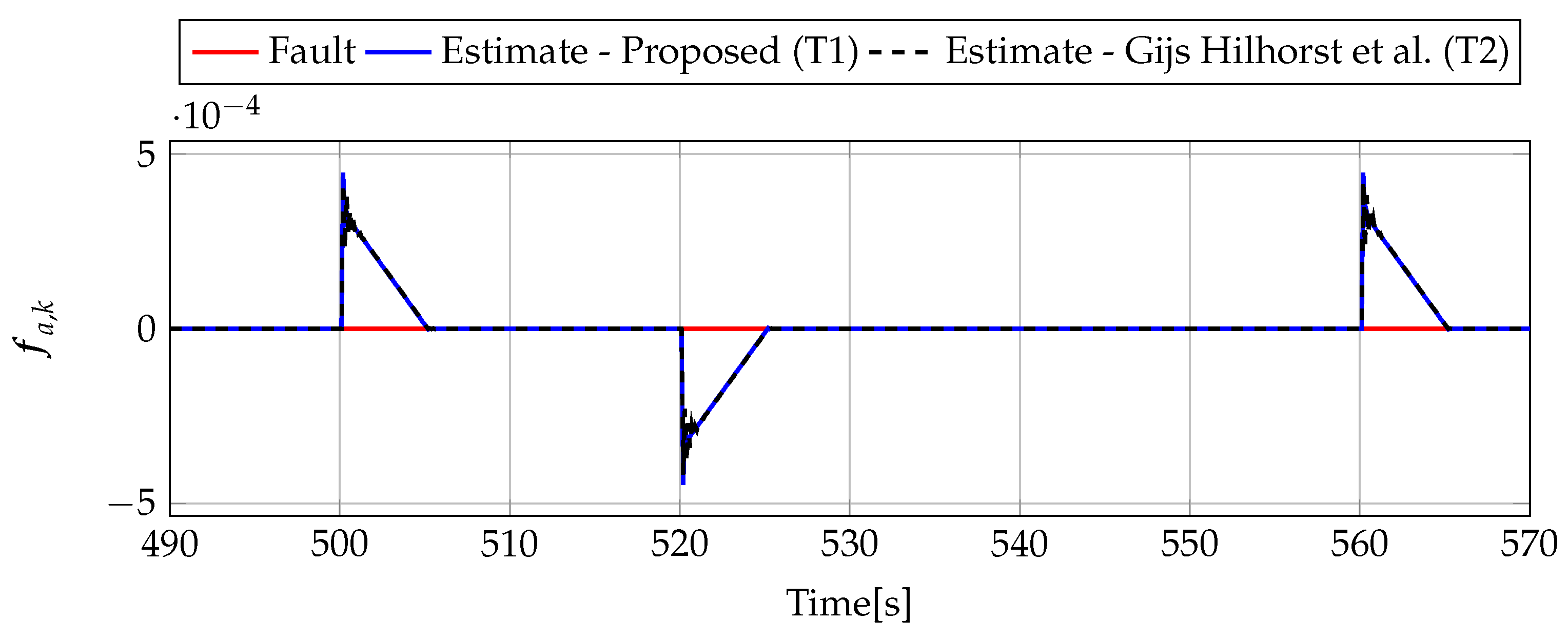
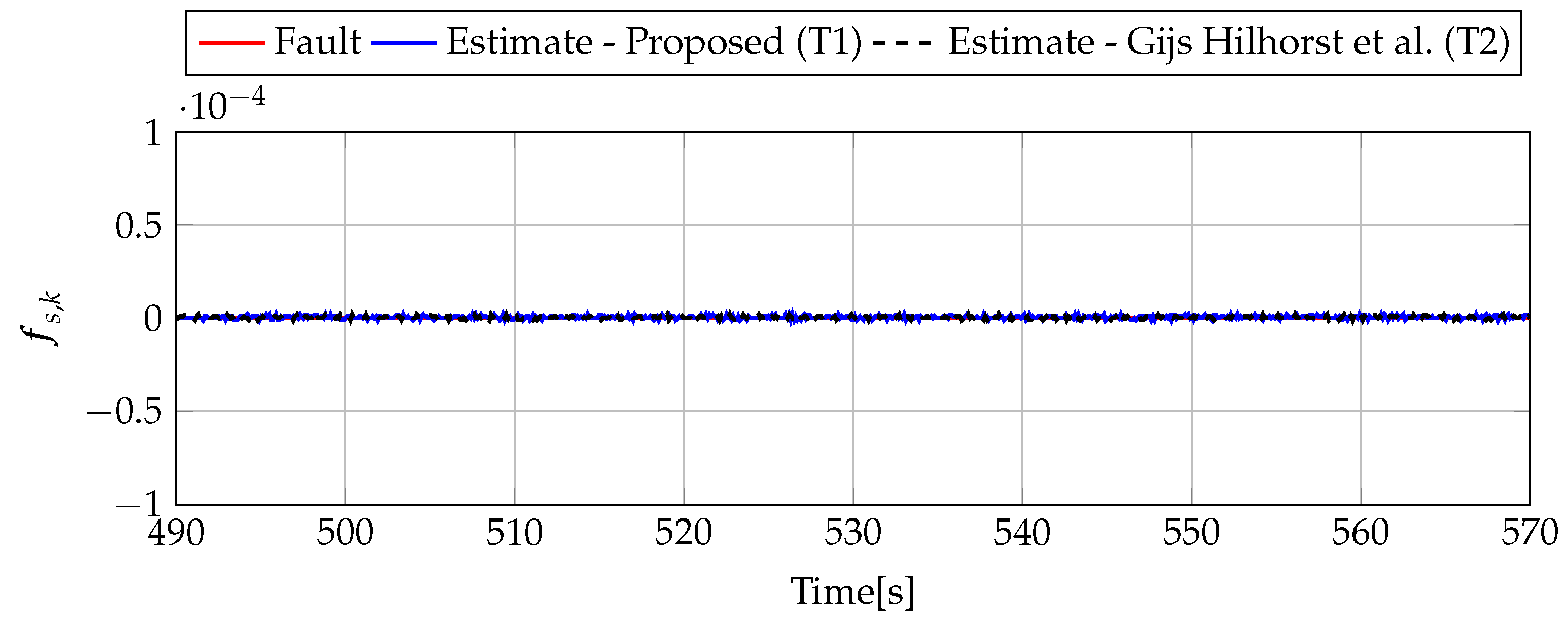
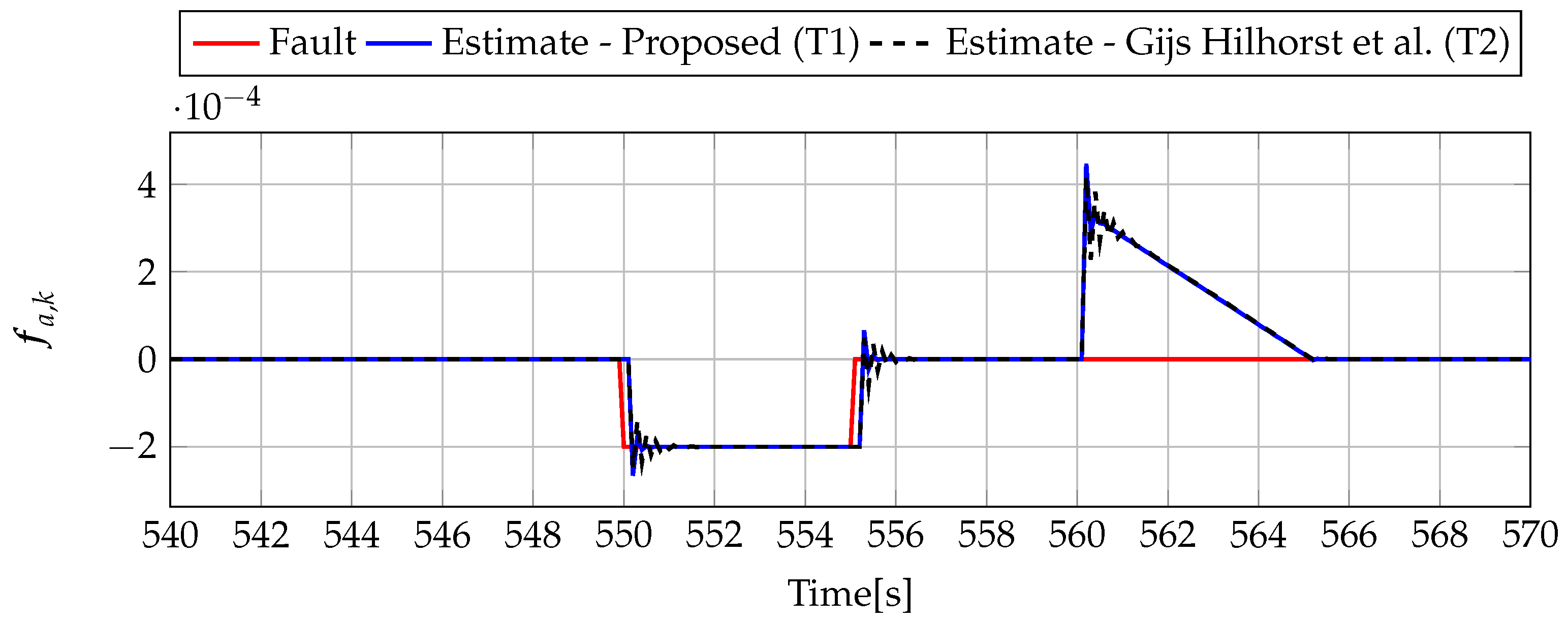
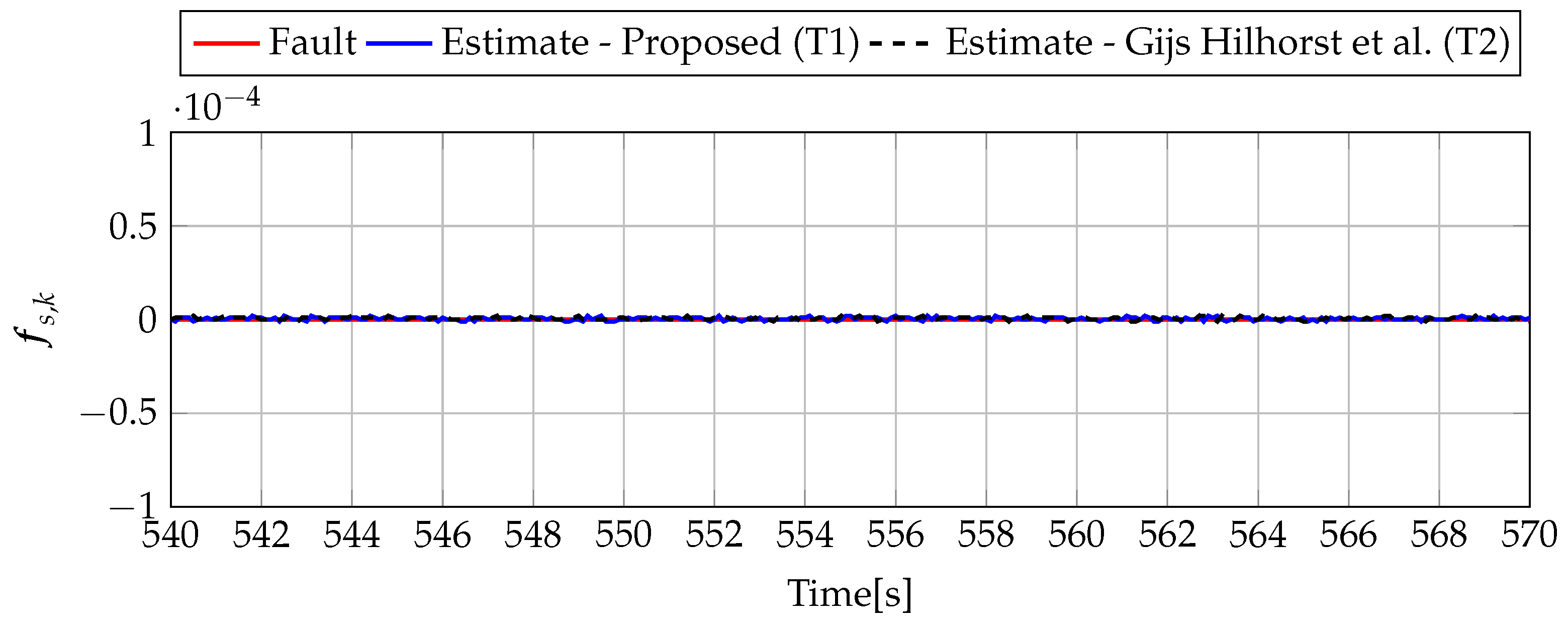
7.2. Simulation Case—DC Servo-Motor
- FS1
- FS2
- FS3
7.3. Analysis of Trade-off—Three-Tank System
7.4. Simulation Case—Three-Tank System
- FS1
- FS2
- FS3
8. Conclusions
Author Contributions
Funding
Acknowledgments
Conflicts of Interest
References
- Gertler, J. Fault Detection and Diagnosis in Engineering Systems; Marcel Dekker: New York, NY, USA, 1998. [Google Scholar]
- Chen, J.; Patton, R.J. Robust Model Based Fault Diagnosis for Dynamic Systems.; Kluwer Academic Publishers: London, UK, 1999. [Google Scholar]
- Witczak, M.; Buciakowski, M.; Mrugalski, M. An approach to fault estimation of non-linear systems: Application to one-link manipulator. In Proceedings of the 19th International Conference On Methods and Models in Automation and Robotics (MMAR), Miedzyzdroje, Poland, 2–5 September 2014; pp. 456–461. [Google Scholar]
- Chadli, M.; Akhenak, A.; Ragot, J.; Maquin, D. State and unknown input estimation for discrete time multiple model. J. Frankl. Inst. 2009, 346, 593–610. [Google Scholar] [CrossRef]
- Isermann, R. Fault Diagnosis Applications: Model Based Condition Monitoring, Actuators, Drives, Machinery, Plants, Sensors, and Fault-tolerant Systems; Springer: Berlin, Germany, 2011. [Google Scholar]
- Ding, S. Model-based Fault Diagnosis Techniques: Design Schemes, Algorithms, and Tools; Springer: Berlin/Heidelberg, Germany, 2008. [Google Scholar]
- Akhenak, A.; Chadli, M.; Maquin, D.; Ragot, J. State estimation via multiple observer with unknown inputs: Application to the three tank system. In Proceedings of the 5th IFAC Symposium on Fault Detection, Supervision and Safety for Technical Processes, Safeprocess’2003, Washington, DC, USA, 9–11 June 2003; p. CDROM. [Google Scholar]
- Akhenak, A.; Chadli, M.; Maquin, D.; Ragot, J. Sliding mode multiple observer for fault detection and isolation. In Proceedings of the 42nd IEEE International Conference on Decision and Control, Maui, HI, USA, 9–12 December 2003; Volume 1, pp. 953–958. [Google Scholar]
- Akhenak, A.; Chadli, M.; Ragot, J.; Maquin, D. Estimation of state and unknown inputs of a nonlinear system represented by a multiple model. IFAC Proc. Vol. 2004, 37, 385–390. [Google Scholar] [CrossRef]
- Blanke, M.; Kinnaert, M.; Lunze, J.; Staroswiecki, M. Diagnosis and Fault-Tolerant Control; Springer: New York, NY, USA, 2003. [Google Scholar]
- Dey, S.; Mohon, S.; Pisu, P.; Ayalew, B. Sensor fault detection, isolation, and estimation in lithium-ion batteries. IEEE Trans. Control Syst. Technol. 2016, 24, 2141–2149. [Google Scholar] [CrossRef]
- Ye, D.; Park, J.H.; Fan, Q.Y. Adaptive robust actuator fault compensation for linear systems using a novel fault estimation mechanism. Int. J. Robust Nonlinear Control 2016, 26, 1597–1614. [Google Scholar] [CrossRef]
- Mrugalski, M.; Luzar, M.; Pazera, M.; Witczak, M.; Aubrun, C. Neural network-based robust actuator fault diagnosis for a non-linear multi-tank system. ISA Trans. 2016, 61, 318–328. [Google Scholar] [CrossRef] [PubMed]
- Buciakowski, M.; Witczak, M.; Puig, V.; Rotondo, D.; Nejjari, F.; Korbicz, J. A bounded-error approach to simultaneous state and actuator fault estimation for a class of nonlinear systems. J. Process Control 2017, 52, 14–25. [Google Scholar] [CrossRef]
- Pröll, S.; Lunze, J.; Jarmolowitz, F. From Structural Analysis to Observer–Based Residual Generation for Fault Detection. Int. J. Appl. Math. Comput. Sci. 2018, 28, 233–245. [Google Scholar] [CrossRef]
- Liu, H.; Zhong, M.; Yang, R. Simultaneous Disturbance Compensation and / Optimization In Fault Detection Of UAVs. Int. J. Appl. Math. Comput. Sci. 2018, 28, 349–362. [Google Scholar] [CrossRef]
- Li, S.; Wang, H.; Aitouche, A.; Tian, Y.; Christov, N. Active fault tolerance control of a wind turbine system using an unknown input observer with an actuator fault. Int. J. Appl. Math. Comput. Sci. 2018, 28, 69–81. [Google Scholar] [CrossRef]
- Srinivasarengan, K.; Ragot, J.; Aubrun, C.; Maquin, D. An adaptive observer design approach for a class of discrete-time nonlinear systems. Int. J. Appl. Math. Comput. Sci. 2018, 28, 55–67. [Google Scholar] [CrossRef]
- Blanke, M.; Kinnaert, M.; Lunze, J.; Staroswiecki, M. Diagnosis and Fault-Tolerant Control, 2nd ed.; Springer: Berlin/Heidelberg, Germany, 2006. [Google Scholar]
- Gaeid, K.S.; Ping, H.W.; Khalid, M.; Masaoud, A. Sensor and sensorless fault tolerant control for induction motors using a wavelet index. Sensors 2012, 12, 4031–4050. [Google Scholar] [CrossRef] [PubMed]
- Tan, J.; Fan, Y.; Yan, P.; Wang, C.; Feng, H. Sliding Mode Fault Tolerant Control for Unmanned Aerial Vehicle with Sensor and Actuator Faults. Sensors 2019, 19, 643. [Google Scholar] [CrossRef] [PubMed]
- Witczak, M.; Puig, V.; de Oca, S. A fault-tolerant control strategy for non-linear discrete-time systems: Application to the twin-rotor system. Int. J. Control 2013, 86, 1788–1799. [Google Scholar] [CrossRef]
- Lan, J.; Patton, R. A new strategy for integration of fault estimation within fault-tolerant control. Automatica 2016, 69, 48–59. [Google Scholar] [CrossRef]
- Witczak, M.; Korbicz, J.; Jozefowicz, R. Design of unknown input observers for non-linear stochastic systems and their application to robust fault diagnosis. Control Cybern. 2013, 42, 227–256. [Google Scholar]
- Veluvolu, K.; Kim, M.; Lee, D. Nonlinear sliding mode high-gain observers for fault estimation. Int. J. Syst. Sci. 2011, 42, 1065–1074. [Google Scholar] [CrossRef]
- Tabatabaeipour, S.M.; Bak, T. Robust observer-based fault estimation and accommodation of discrete-time piecewise linear systems. J. Frankl. Inst. 2014, 351, 277–295. [Google Scholar] [CrossRef]
- Seron, M.M.; Doná, J.A.D. Robust fault estimation and compensation for LPV systems under actuator and sensor faults. Automatica 2015, 52, 294–301. [Google Scholar] [CrossRef]
- Youssef, T.; Chadli, M.; Karimi, H.R.; Wang, R. Actuator and sensor faults estimation based on proportional integral observer for TS fuzzy model. J. Frankl. Inst. 2017, 354, 2524–2542. [Google Scholar] [CrossRef]
- Gillijns, S.; De Moor, B. Unbiased minimum-variance input and state estimation for linear discrete-time systems with direct feedthrough. Automatica 2007, 43, 934–937. [Google Scholar] [CrossRef]
- Witczak, M.; Buciakowski, M.; Puig, V.; Rotondo, D.; Nejjari, F. An LMI approach to robust fault estimation for a class of nonlinear systems. Int. J. Robust Nonlinear Control 2016, 26, 1530–1548. [Google Scholar] [CrossRef]
- Veremey, E.; Knyazkin, Y. Spectral H2 fault estimation observer design based on allocation of the correction effect. J. Theor. Appl. Inf. Technol. 2017, 95, 2776–2782. [Google Scholar]
- Alessandri, A.; Baglietto, M.; Battistelli, G. Design of state estimators for uncertain linear systems using quadratic boundedness. Automatica 2006, 42, 497–502. [Google Scholar] [CrossRef]
- Puig, V. Fault diagnosis and fault tolerant control using set-membership approaches: Application to real case studies. Int. J. Appl. Math. Comput. Sci. 2010, 20, 619–635. [Google Scholar] [CrossRef]
- Che Mid, E.; Dua, V. Model-based parameter estimation for fault detection using multiparametric programming. Ind. Eng. Chem. Res. 2017, 56, 8000–8015. [Google Scholar] [CrossRef]
- Mid, E.C.; Dua, V. Fault Detection in Wastewater Treatment Systems Using Multiparametric Programming. Processes 2018, 6, 231. [Google Scholar] [CrossRef]
- Mid, E.C.; Dua, V. Fault detection of fermentation processes. In Computer Aided Chemical Engineering; Elsevier: Amsterdam, The Netherlands, 2018; Volume 43, pp. 1171–1176. [Google Scholar]
- VanAntwerp, J.; Braatz, R. A tutorial on linear and bilinear matrix inequalities. J. Process Control 2000, 10, 363–385. [Google Scholar] [CrossRef]
- Zhang, Y.; Jiang, J. Bibliographical review on reconfigurable fault-tolerant control systems. Annu. Rev. Control 2008, 32, 229–252. [Google Scholar] [CrossRef]
- Hilhorst, G.; Pipeleers, G.; Oliveira, R.C.; Peres, P.L.; Swevers, J. On Extended LMI Conditions for / Control of Discrete-Time Linear Systems. In Proceedings of the 19th IFAC World Congress, Cape Town, South Africa, 25–29 August 2014; pp. 9307–9312. [Google Scholar]
- Buciakowski, M.; Witczak, M.; Mrugalski, M.; Theilliol, D. A quadratic boundedness approach to robust DC motor fault estimation. Control Eng. Pract. 2017, 66, 181–194. [Google Scholar] [CrossRef]
- INTECO. Multitank System—User’s Manual; INTECO: Bruck an der Mur, Austria, 2013. [Google Scholar]





















{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Proposed (T1) | Hilhorst et al. (T2) | |
|---|---|---|
| 0.3193 | 1.6467 | |
| 0.5666 | 1.1870 | |
| 0.3510 | 0.4597 | |
| 0.9176 | 0.6547 | |
| 0.3227 | 1.6467 | |
| 0.5948 | 0.9920 | |
| 1.0000 | 3.2999 | |
| 0.9595 | 2.2283 | |
| 0.0404 | 1.0716 | |
| 10.0000 | 10.0000 | |
| 9.6806 | 7.41762 | |
| 0.3193 | 2.5823 |
| Proposed (T1) | Hilhorst et al. (T2) | |
|---|---|---|
| 0.7658 | 0.7701 | |
| 0.0079 | 0.0089 | |
| 0.7579 | 0.7611 | |
| 0.7658 | 0.7701 | |
| 0.0251 | 0.0252 | |
| 0.7406 | 0.7449 | |
| 0.0700 | 0.7000 | |
| 0.0088 | 0.0148 | |
| 0.0611 | 0.6851 | |
| 2.0000 | 4.0000 | |
| 1.7528 | 1.9587 | |
| 0.2471 | 2.0412 |
© 2019 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Buciakowski, M.; Pazera, M.; Witczak, M.
A Combined
Buciakowski M, Pazera M, Witczak M.
A Combined
Buciakowski, Mariusz, Marcin Pazera, and Marcin Witczak.
2019. "A Combined
Buciakowski, M., Pazera, M., & Witczak, M.
(2019). A Combined