Water Temperature Observation by Coastal Acoustic Tomography in Artificial Upwelling Area


Abstract
:1. Introduction
2. Theoretical Analysis
2.1. Equations for Sound Speed Deviation Fields
2.2. Inversion Process
3. Experiments
4. Results and Discussions
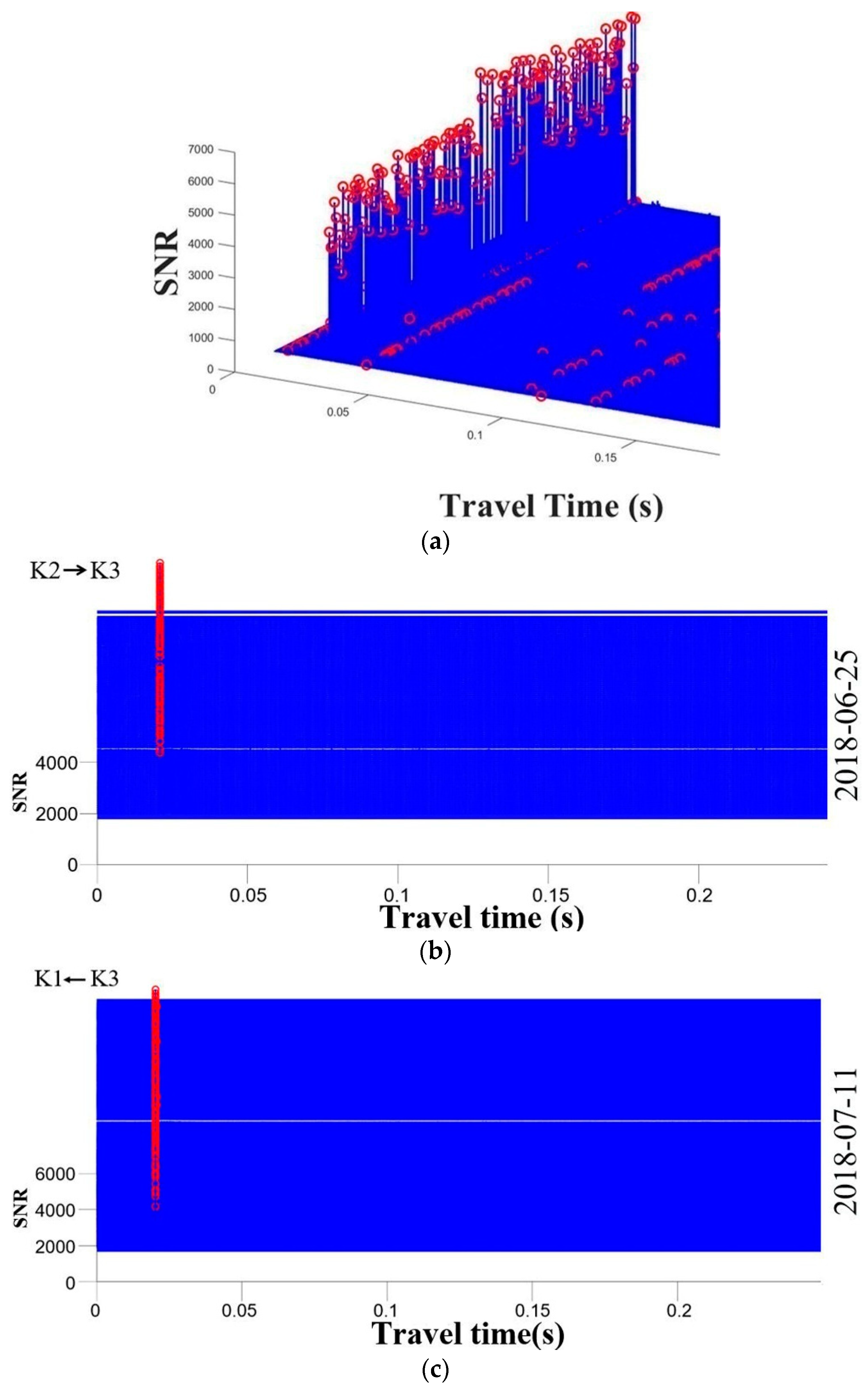
4.1. The Signal Correlation
4.2. Horizontal Temperature Field Mapping
- (1)
- The horizontal temperature distribution of a certain depth could be obtained and displayed. This depth is decided by the transducer placement. To obtain accurate temperature mapping, we suggest each transducer be placed at the same depth.
- (2)
- The temperature of the upwelling area is significantly lower than that of its surrounding regions; this is obvious in Figure 8a,b,d. This is because the cooler water at the depth of 4 m is brought to the surface by upwelling, reducing the water temperature at the surface of the upwelling area. The lowest water temperature is often at the upwelling center.
- (3)
- It is most obvious in Figure 8d that the temperature in the upwelling area is much lower than its surrounding area. Compared with Figure 8a,b, the number of stations in Figure 8d is 4; compared with Figure 8c, the station spacing of Figure 8d is larger. We conclude that increasing the number of stations and station spacing may help to improve the accuracy of the temperature mapping.
- (4)
- The temperature distribution on Figure 8c did not change much before and after the upwelling, possibly because stations K1 and K2, K3 and K4 are positioned too close to each other, resulting in a non-ideal inversion process. However, due to the noticeable change in average temperature, upwelling phenomenon could still be detected.
4.3. Comparison of CAT Results with Temperature Sensor Results
- (1)
- All figures in Figure 9 show that the CAT results are distributed between the depth of 0 and 2 m. This is consistent with the deployed depth of transducer, i.e., approximate 1 m.
- (2)
- The water temperature of the anechoic tank decreases from the surface to the bottom. Especially between 0 and 2 m, the temperature drops sharply. This phenomenon indicates that the closer the transducer is placed on the surface, the more accurate temperature changes it could capture.
- (3)
- Figure 9 also shows that the surface temperature is between 20.5 and 21 °C. After upwelling the water at depth of 4m, the surface temperature drops by about 3 °C.
- (4)
- After the upwelling, the CAT observation results are approximate to the water temperature at the surface. Before the upwelling begins, temperature from CAT observation fluctuates and remains within a certain range. After the upwelling, the temperature begins to drop, but stabilizes as the water flow with different depths is mixed. The temperature change captured by CAT before and after the upwelling is approximately 1 °C.
- (5)
- Figure 9d produces the best results in term of the least temperature fluctuating range with 0.5 °C in CAT observation results. This is also consistent with the conclusion from the inversion results in Section 4.2.
4.4. The Accuracy Analysis of CAT Observation Results
5. Conclusions
- The change in temperature field could be successfully observed by comparing the horizontal temperature field before and after the upwelling.
- The CAT observation results are basically consistent with the temperature sensor results. This proves the feasibility of CAT for artificial upwelling observation.
- The temperature field in the experimental area has the following characteristics before and after the upwelling. Before the upwelling, the water temperature in the vertical direction changes obviously. After upwelling, the water temperature on the surface decreases rapidly by approximately 3 °C, and stabilizes due tothe exchange of water flow from different depths.
Author Contributions
Funding
Conflicts of Interest
References
- Jacob, C.; Buffard, A.; Pioch, S.; Thorin, S. Marine ecosystem restoration and biodiversity offset. Ecol. Eng. 2018, 120, 585–594. [Google Scholar] [CrossRef]
- Pan, Y.W.; Fan, W.; Zhang, D.H.; Chen, J.W. Research progress in artificial upwelling and its potential environmental effects. Sci. China Earth Sci. 2016, 59, 236–248. [Google Scholar] [CrossRef]
- Pan, Y.; You, L.; Li, Y.; Fan, W.; Chan, C.T.A.; Wang, B.J.; Chen, Y. Achieving highly efficient atmospheric CO2 uptake by artificial upwelling. Sustainability 2018, 10, 664. [Google Scholar] [CrossRef]
- Soloviev, A.; Dean, C.; Golbraikh, E.; Gertman, I. Mitigating Local Environmental Extremes with Artificial Ocean Upwelling. In Proceedings of the EGU General Assembly Conference Abstracts, Vienna, Austria, 7–12 April 2018; Volume 20, p. 18473. [Google Scholar]
- Cheng, Y.H.; Ho, C.R.; Zheng, Z.W.; Lee, Y.-H.; Kuo, N.-J. An algorithm for cold patch detection in the Sea off northeast Taiwan using multi-sensor data. Sensors 2009, 9, 5521–5533. [Google Scholar] [CrossRef] [PubMed]
- Tsubaki, K.; Maruyama, S.; Komiya, A.; Mitsugashira, H. Continuous measurement of an artificial upwelling of deep-sea water induced by the perpetual salt fountain. Deep Sea Res. Part I Oceanogr. Res. Pap. 2007, 54, 75–84. [Google Scholar] [CrossRef]
- Xu, Z.; Xiao, C.; Xu, F.; Fan, W.; Pan, H. Preliminary Study on Monitoring System for the Demonstration Area of Artificial Upwelling. In Proceedings of the OCEANS 2018 MTS/IEEE Charleston, Charleston, SC, USA, 22–25 October 2018; pp. 1–7. [Google Scholar]
- Munk, W.; Wunsch, C. Ocean acoustic tomography: A scheme for large scale monitoring. Deep Sea Res. Part A Oceanogr. Res. Pap. 1979, 26, 123–161. [Google Scholar] [CrossRef]
- Yamoaka, H.; Kaneko, A.; Park, J.H.; Zheng, H.; Gohda, N.; Takano, T.; Zhu, X.H.; Takasugi, Y. Coastal acoustic tomography system and its field application. IEEE J. Ocean. Eng. 2002, 27, 283–295. [Google Scholar] [CrossRef]
- Zhu, Z.N.; Zhu, X.H.; Guo, X.; Fan, X.; Zhang, C. Assimilation of coastal acoustic tomography data using an unstructured triangular grid ocean model for water with complex coastlines and islands. J. Geophys. Res. Oceans 2017, 122, 7013–7030. [Google Scholar] [CrossRef]
- Syamsudin, F.; Chen, M.; Kaneko, A.; Adityawarman, Y. Profiling measurement of internal tides in Bali Strait by reciprocal sound transmission. Acoust. Sci. Technol. 2017, 38, 246–253. [Google Scholar] [CrossRef]
- Chen, M.; Syamsudin, F.; Kaneko, A.; Gohda, N. Real-time offshore coastal acoustic tomography enabled with mirror-transpond functionality. IEEE J. Ocean. Eng. 2018. [Google Scholar] [CrossRef]
- Taniguchi, N.; Huang, C.F.; Arai, M.; Howe, B.M. Variation of residual current in the Seto Inland Sea driven by sea level difference between the Bungo and Kii Channels. J. Geophys. Res. Oceans 2018, 123, 2921–2933. [Google Scholar] [CrossRef]
- Li, Y.; Liu, S.; Inaki, S. Dynamic reconstruction algorithm of three-dimensional temperature field measurement by acoustic tomography. Sensors 2017, 17, 2084. [Google Scholar] [CrossRef]
- Cui, J.H.; Kong, J.; Gerla, M.; Zhou, S. The challenges of building scalable mobile underwater wireless sensor networks for aquatic applications. IEEE Netw. 2006, 20, 12. [Google Scholar]
- Parra, L.; Lloret, G.; Lloret, J.; Rodilla, M. Physical sensors for precision aquaculture: A Review. IEEE Sens. J. 2018, 18, 3915–3923. [Google Scholar] [CrossRef]
- Woolfe, K.F.; Lani, S.; Sabra, K.G.; Kuperman, W.A. Monitoring deep-ocean temperatures using acoustic ambient noise. Geophys. Res. Lett. 2015, 42, 2878–2884. [Google Scholar] [CrossRef]
- Carriere, O.; Hermand, J.P.; Calado, L.; Paula, A.C.D.; Silveira, I. Feature-oriented acoustic tomography: Upwelling at Cabo Frio (Brazil). In Proceedings of the OCEANS IEEE, Biloxi, MS, USA, 26–29 October 2009; pp. 1–8. [Google Scholar]
- Zhang, C.; Kaneko, A.; Zhu, X.H.; Gohda, N. Tomographic mapping of a coastal upwelling and the associated diurnal internal tides in Hiroshima Bay, Japan. J. Geophys. Res. Oceans 2015, 120, 4288–4305. [Google Scholar] [CrossRef]
- Chen, M.; Kaneko, A.; Lin, J.; Chuanzheng, Z. Mapping of a Typhoon-Driven Coastal Upwelling by Assimilating Coastal Acoustic Tomography Data. J. Geophys. Res. Oceans 2017, 122, 7822–7837. [Google Scholar] [CrossRef]
- Liu, W.; Zhu, X.; Zhu, Z.; Zhang, Z. A coastal acoustic tomography experiment in the Qiongzhou Strait. In Proceedings of the IEEE/OES China Ocean Acoustics (COA), Harbin, China, 9–11 January 2016; pp. 1–6. [Google Scholar]
- Medwin, H. Speed of sound in water: A simple equation for realistic parameters. J. Acoust. Soc. Am. 1975, 58, 1318–1319. [Google Scholar] [CrossRef]
- Park, J.H.; Kaneko, A. Computer simulation of coastal acoustic tomography by a two-dimensional vortex mode. J. Ocean. 2001, 57, 593–602. [Google Scholar] [CrossRef]
- Leng, J.Y.; Chen, J.W.; Huang, H.C.; Lin, S.; Liu, M.Z.; Liu, J.B. Impact of Structure Design of Artificial Upwelling Tube. Appl. Mech. Mater. 2014, 496, 547–550. [Google Scholar]
- Qiang, Y.; Fan, W.; Xiao, C.; Pan, Y. Effects of operating parameters and injection method on the performance of an artificial upwelling by using airlift pump. Appl. Ocean Res. 2018, 78, 212–222. [Google Scholar] [CrossRef]













{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| 2 | 50 kHz | 1500 m/s | 7.5–30 m | 8 | 4.24 m/s | 0.33–1.32 |
© 2019 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Huang, H.; Guo, Y.; Wang, Z.; Shen, Y.; Wei, Y. Water Temperature Observation by Coastal Acoustic Tomography in Artificial Upwelling Area. Sensors 2019, 19, 2655. https://doi.org/10.3390/s19122655
Huang H, Guo Y, Wang Z, Shen Y, Wei Y. Water Temperature Observation by Coastal Acoustic Tomography in Artificial Upwelling Area. Sensors. 2019; 19(12):2655. https://doi.org/10.3390/s19122655
Chicago/Turabian StyleHuang, Haocai, Yong Guo, Zhikun Wang, Yun Shen, and Yan Wei. 2019. "Water Temperature Observation by Coastal Acoustic Tomography in Artificial Upwelling Area" Sensors 19, no. 12: 2655. https://doi.org/10.3390/s19122655
APA StyleHuang, H., Guo, Y., Wang, Z., Shen, Y., & Wei, Y. (2019). Water Temperature Observation by Coastal Acoustic Tomography in Artificial Upwelling Area. Sensors, 19(12), 2655. https://doi.org/10.3390/s19122655