Partition-Based Joint Placement of Gateway and Controller in SDN-Enabled Integrated Satellite-Terrestrial Networks


Abstract
:1. Introduction
- A Simulated Annealing Partition-based K-Means (SAPKM) algorithm is proposed to ameliorate the joint placement problem in the SDN-enabled ISTNs. By adopting SAPKM, performance indicators can be accomplished in the sub-domains instead of the whole network, which dramatically reduces the complexity of the joint placement problem. Besides, selecting the centroids of the sub-domains as initialized nodes further decreases the number of redundant iterations.
- The joint placement problem in terms of reliability maximization with network latency constraints is analytically formulated. With the appropriate deployment for gateways and controllers, the proposed algorithm will shed light on other performance metrics including controller-switch latency, load balancing, and even the trade-offs among multiple objectives.
- Considering the intrinsic properties of network topologies, i.e. the structure and the density of the internal nodes, experiments are performed on real network topologies varying in size and structure.
- Compared with the existing algorithms, simulation results indicate the merits of the proposed algorithm in shortening network latency, enhancing network reliability with much lower complexity, especially for adapting to large topologies with multiple gateways and controllers to deploy. All the adaptive traits are propitious for studying the online joint placement problem for dynamic networks in the future.
2. Related Works
3. System Model
3.1. An Architecture for SDN-Enabled Integrated Satellite-Terrestrial Networks
3.2. Preliminary Assumptions
3.3. Joint Placement Metrics
3.4. Problem Formulation
4. Network Partition Algorithm for the Joint Placement Problem
4.1. Simulated Annealing Partition-Based K-Means Algorithm
| Algorithm 1 Partition-based K-Means algorithm (PKM). |
Require:
Ensure:
|
| Algorithm 2 Simulated Annealing Partition-based K-Means algorithm (SAPKM). |
Require:
Ensure:
|
4.2. Analysis of the Complexity and Effectiveness of SAPKM
5. Simulation Results
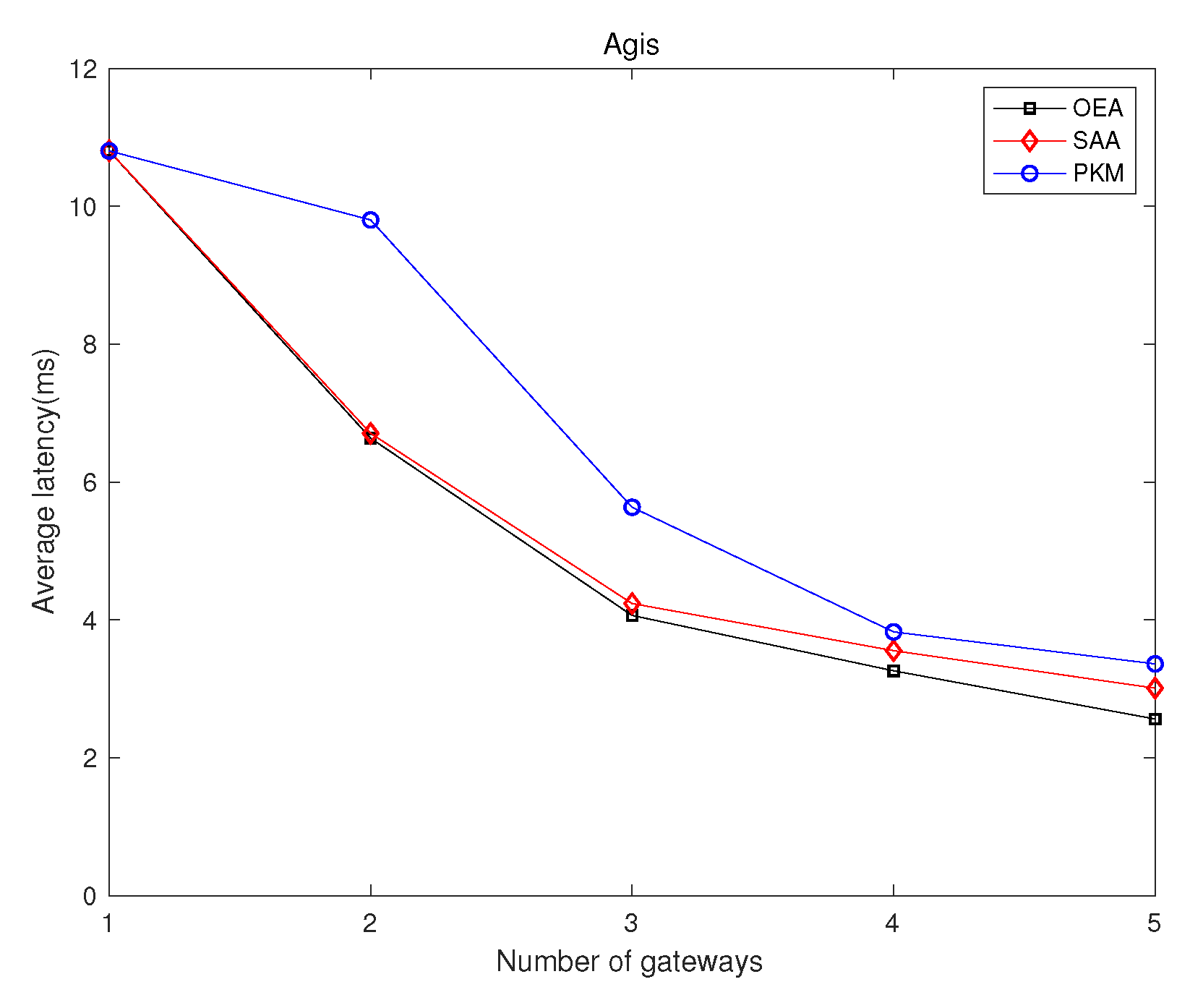
5.1. Network Latency Minimization
5.2. Reliability Maximization with Latency Constraints
6. Conclusions
Author Contributions
Funding
Acknowledgments
Conflicts of Interest
Abbreviations
| 3GPP | Third Generation Partnership Project |
| 5G | Fifth Generation |
| CPP | Controller Placement Problem |
| GEO | Geostationary Orbit |
| gNB | gNodeBs |
| GPP | Gateway Placement Problem |
| ISTNs | Integrated Satellite-Terrestrial Networks |
| JPKM | Joint Partition-Based K-Means |
| NFV | Network Function Virtualization |
| OEA | Optimal Enumeration Algorithm |
| OEAJ | Optimal Enumeration Algorithm for the Joint placement problem |
| QoE | Quality off Experience |
| QoS | Quality of Service |
| PKM | Partition-Based K-Means |
| RAN | Radio Access Network |
| RNs | Relay Nodes |
| SAA | Simulated Annealing Algorithm |
| SACA | Simulated Annealing and Clustering hybrid Algorithm |
| SAPKM | Simulated Annealing Partition-based K-Means |
| SDN | Software-Defined Networking |
References
- 3GPP. Study on New Radio (NR) to Support Non-Terrestrial Networks. In 3rd Generation Partnership Project; TR 38.811 V15.0.0; 3GPP: Valbonne, France, 2018. [Google Scholar]
- 3GPP. Study on Using Satellite Access in 5G. In 3rd Generation Partnership Project; TR 22.822 V16.0.0; 3GPP: Valbonne, France, 2018. [Google Scholar]
- Taleb, T.; Hadjadj-Aoul, Y.; Ahmed, T. Challenges, Opportunities, and Solutions for Converged Satellite and Terrestrial Networks. IEEE Wirel. Commun. 2011, 18, 46–52. [Google Scholar] [CrossRef]
- Niephaus, C.; Kretschmer, M.; Ghinea, G. QoS Provisioning in Converged Satellite and Terrestrial Networks: A Survey of the State-of-the-Art. IEEE Commun. Surv. Tutor. 2016, 18, 2415–2441. [Google Scholar] [CrossRef]
- Feng, B.; Zhou, H.; Zhang, H.; Li, G.; Li, H.; Yu, S.; Chao, H.-C. HetNet: A Flexible Architecture for Heterogeneous Satellite-Terrestrial Networks. IEEE Netw. 2017, 31, 86–92. [Google Scholar] [CrossRef]
- Nobre, J.; Rosário, D.; Both, C.; Cerqueira, E.; Gerla, M. Toward Software-Defined Battlefield Networking. IEEE Commun. Mag. 2016, 54, 152–157. [Google Scholar] [CrossRef]
- Guo, K.; Lin, M.; Zhang, B.; Zhu, W.-P.; Wang, J.-B.; Tsiftsis, T.A. On the performance of LMS communication with hardware impairments and interference. IEEE Trans. Commun. 2019, 67, 1490–1505. [Google Scholar] [CrossRef]
- Guo, K.; An, K.; Zhang, B.; Huang, Y.; Guo, D. Physical layer security for hybrid satellite terrestrial relay networks with joint relay selection and user scheduling. IEEE Access 2018, 6, 55815–55827. [Google Scholar] [CrossRef]
- Guo, K.; An, K.; Zhang, B.; Huang, Y.; Guo, D.; Zheng, G.; Chatzinotas, S. On the performance of the uplink satellite multi-terrestrial relay networks with hardware impairments and interference. IEEE Syst. J. 2019. [Google Scholar] [CrossRef]
- Li, B.; Fei, Z.; Xu, X.; Chu, Z. Resource allocations for secure cognitive satellite-terrestrial networks. IEEE Wirel. Commun. Lett. 2018, 7, 78–81. [Google Scholar] [CrossRef]
- Li, B.; Fei, Z.; Chu, Z.; Zhou, F.; Wong, K.K.; Xiao, P. Robust chance-constrained secure transmission for cognitive satellite-terrestrial networks. IEEE Trans. Vehi. Tech. 2018, 67, 4208–4219. [Google Scholar] [CrossRef]
- Ai, Y.; Mathur, A.; Cheffena, M.; Bhatnagar, M.R.; Lei, H. Physical layer security of hybrid satellite-FSO cooperative systems. IEEE Photonics J. 2019, 11, 1–14. [Google Scholar] [CrossRef]
- Giambene, G.; Kota, S.; Pillai, P. Satellite-5G Integration: A Network Perspective. IEEE Netw. 2018, 32, 25–31. [Google Scholar] [CrossRef]
- Boero, L.; Bruschi, R.; Davoli, F.; Marchese, M.; Patrone, F. Satellite Networking Integration in the 5G Ecosystem: Research Trends and Open Challenges. IEEE Netw. 2018, 32, 9–15. [Google Scholar] [CrossRef]
- Zhu, X.; Jiang, C.; Kuang, L.; Ge, N.; Lu, J. Energy Efficient Resource Allocation in Cloud Based Integrated Terrestrial-Satellite Networks. In Proceedings of the 2018 IEEE International Conference on Communications, Kansas City, MO, USA, 20–24 May 2018; pp. 1–6. [Google Scholar]
- Li, T.; Zhou, H.; Luo, H.; Yu, S. SERvICE: A Software Defined Framework for Integrated Space-Terrestrial Satellite Communication. IEEE Trans. Mob. Comput. 2018, 17, 703–716. [Google Scholar] [CrossRef]
- Li, T.; Zhou, H.; Luo, H.; Xu, Q.; Ye, Y. Using SDN and NFV to Implement Satellite Communication Networks. In Proceedings of the 2016 International Conference on Networking and Network Applications (NaNA), Hakodate, Japan, 23–25 July 2016; pp. 131–134. [Google Scholar]
- Ferrús, R.; Koumaras, H.; Sallent, O.; Agapiou, G.; Rasheed, T.; Kourtis, M.-A.; Boustie, C.; Gélard, P.; Ahmed, T. SDN/NFV-enabled Satellite Communications Networks: Opportunities, Scenarios and Challenges. Phys. Commun. 2016, 18, 95–112. [Google Scholar] [CrossRef]
- Nguyen, V.; Brunstrom, A.; Grinnemo, K.; Taheri, J. SDN/NFV-Based Mobile Packet Core Network Architectures: A Survey. IEEE Commun. Surv. Tutor. 2017, 19, 1567–1602. [Google Scholar] [CrossRef] [Green Version]
- Xiao, P.; Qu, W.; Qi, H.; Li, Z.; Xu, Y. The SDN Controller Placement Problem for WAN. In Proceedings of the 2014 IEEE/CIC International Conference on Communications in China (ICCC), Shanghai, China, 13–15 October 2014; pp. 220–224. [Google Scholar]
- Li, T.; Zhou, H.; Luo, H.; You, I.; Xu, Q. SAT-FLOW: Multi-Strategy Flow Table Management for Software Defined Satellite Networks. IEEE Access 2017, 5, 14952–14966. [Google Scholar] [CrossRef]
- Tanha, M.; Sajjadi, D.; Ruby, R.; Pan, J. Capacity-Aware and Delay-Guaranteed Resilient Controller Placement for Software-Defined WANs. IEEE Trans. Netw. Serv. Manag. 2018, 15, 991–1005. [Google Scholar] [CrossRef]
- Wang, G.; Zhao, Y.; Huang, J.; Wu, Y. An Effective Approach to Controller Placement in Software Defined Wide Area Networks. IEEE Trans. Netw. Serv. Manag. 2018, 15, 344–355. [Google Scholar] [CrossRef]
- Liu, J.; Shi, Y.; Zhao, L.; Cao, Y.; Sun, W.; Kato, N. Joint Placement of Controllers and Gateways in SDN-Enabled 5G-Satellite Integrated Network. IEEE J. Sel. Areas Commun. 2018, 36, 221–232. [Google Scholar] [CrossRef]
- Choi, J.P.; Joo, C. Challenges for efficient and seamless space-terrestrial heterogeneous networks. IEEE Commun. Mag. 2015, 53, 156–162. [Google Scholar] [CrossRef]
- Bertaux, L.; Medjiah, S.; Berthou, P.; Abdellatif, S.; Hakiri, A.; Gelard, P.; Planchou, F.; Bruyere, M. Software defined networking and virtualization for broadband satellite networks. IEEE Commun. Mag. 2015, 53, 54–60. [Google Scholar] [CrossRef]
- Yang, B.; Wu, Y.; Chu, X.; Song, G. Seamless Handover in Software-Defined Satellite Networking. IEEE Commun. Lett. 2016, 20, 1768–1771. [Google Scholar] [CrossRef]
- Evans, B.G. The role of satellites in 5G. In Proceedings of the 7th Advanced Satellite Multimedia Systems Conference and the 13th Signal Processing for Space Communications Workshop (ASMS/SPSC), Livorno, Italy, 8–10 September 2014; pp. 197–202. [Google Scholar]
- Heller, B.; Sherwood, R.; McKeown, N. The Controller Placement Problem. In Proceedings of the 1st ACM International Workshop on Hot Topics in Software Defined Networks, Helsinki, Finland, 13 August 2012; pp. 7–12. [Google Scholar]
- Sallahi, A.; St-Hilaire, M. Optimal Model for the Controller Placement Problem in Software Defined Networks. IEEE Commun. Lett. 2015, 19, 30–33. [Google Scholar] [CrossRef]
- Lange, S.; Gebert, S.; Zinner, T.; Tran-Gia, P.; Hock, D.; Jarschel, M.; Hoffmann, M. Heuristic Approaches to the Controller Placement Problem in Large Scale SDN Networks. IEEE Trans. Netw. Serv. Manag. 2015, 12, 4–17. [Google Scholar] [CrossRef]
- Hu, Y.; Wang, W.; Gong, X.; Que, X.; Cheng, S. On Reliability-Optimized Controller Placement for Software-Defined Networks. China Commun. 2014, 11, 38–54. [Google Scholar] [CrossRef]
- Yao, G.; Bi, J.; Li, Y.; Guo, L. On the Capacitated Controller Placement Problem in Software Defined Networks. IEEE Commun. Lett. 2014, 18, 1339–1342. [Google Scholar] [CrossRef]
- Killi, B.P.R.; Rao, S.V. Capacitated Next Controller Placement in Software Defined Networks. IEEE Trans. Netw. Serv. Manag. 2017, 14, 514–527. [Google Scholar] [CrossRef]
- Chen, W.; Chen, C.; Jiang, X.; Liu, L. Multi-Controller Placement Towards SDN Based on Louvain Heuristic Algorithm. IEEE Access 2018, 6, 49486–49497. [Google Scholar] [CrossRef]
- Ros, F.J.; Ruiz, P.M. Five nines of Southbound Reliability in Software-Defined Networks. In Proceedings of the Third Workshop on Hot Topics in Software Defined Networking, Chicago, IL, USA, 22 August 2014; ACM: New York, NY, USA, 2014; pp. 31–36. [Google Scholar]
- Huque, M.T.I.; Si, W.; Jourjon, G.; Gramoli, V. Large-Scale Dynamic Controller Placement. IEEE Trans. Netw. Serv. Manag. 2017, 14, 63–76. [Google Scholar] [CrossRef]
- Cao, Y.; Shi, Y.; Liu, J.; Kato, N. Optimal Satellite Gateway Placement in Space-Ground Integrated Network for Latency Minimization With Reliability Guarantee. IEEE Wirel. Commun. Lett. 2018, 7, 174–177. [Google Scholar] [CrossRef]
- Cao, Y.; Guo, H.; Liu, J.; Kato, N. Optimal Satellite Gateway Placement in Space-Ground Integrated Networks. IEEE Netw. 2018, 32, 32–37. [Google Scholar] [CrossRef]
- The Internet Topology Zoo. 2012. Available online: http://www.topology-zoo.org/dataset.html (accessed on 6 June 2018).
- Wang, G.; Zhao, Y.; Huang, J.; Wang, W. The Controller Placement Problem in Software Defined Networking: A Survey. IEEE Netw. 2017, 31, 21–27. [Google Scholar] [CrossRef]















{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Type of Network | Type of Path | Network Latency | Network Reliability | Inter-Plane Latency |
|---|---|---|---|---|
| Pure SDN-enabled networks | controller-switch | ✓ | ✓ | |
| gateway-switch | ✓ | |||
| SDN-enabled ISTNs | controller-gateway | ✓ | ||
| controller-switch | ✓ | ✓ |
| Notation | Definition |
|---|---|
| a physical network with node set and link set | |
| the set of terrestrial switch nodes | |
| the set of satellite gateways | |
| the set of SDN controllers | |
| s | the satellite node |
| w | a satellite gateway in |
| c | an SDN controller in |
| u | a switch node in |
| k | the number of satellite gateways |
| m | the number of SDN controllers |
| n | the number of switch nodes |
| failure probability of terrestrial nodes | |
| failure probability of terrestrial links | |
| failure probability of the satellite link from s to w | |
| propagation latency from u to s via w | |
| propagation latency from u to w | |
| propagation latency from w to s | |
| propagation latency constraint: maximum latency the terrestrial networks can tolerate | |
| propagation latency from u to c | |
| reliability of the shortest path from u to c | |
| reliability of s to c via w with the shortest terrestrial path |
| Topology | Number of Nodes | Number of Links | |||
|---|---|---|---|---|---|
| Nsfnet | 13 | 15 | [0, 0.05] | [0, 0.02] | [0, 0.02] |
| Aarnet | 19 | 24 | [0, 0.05] | [0, 0.02] | [0, 0.02] |
| ATT | 25 | 57 | [0, 0.06] | [0, 0.04] | [0, 0.03] |
| Agis | 25 | 30 | [0, 0.06] | [0, 0.04] | [0, 0.03] |
| Geant | 37 | 58 | [0, 0.08] | [0, 0.08] | [0, 0.05] |
| Chinanet | 38 | 62 | [0, 0.08] | [0, 0.08] | [0, 0.05] |
© 2019 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Yang, K.; Zhang, B.; Guo, D. Partition-Based Joint Placement of Gateway and Controller in SDN-Enabled Integrated Satellite-Terrestrial Networks. Sensors 2019, 19, 2774. https://doi.org/10.3390/s19122774
Yang K, Zhang B, Guo D. Partition-Based Joint Placement of Gateway and Controller in SDN-Enabled Integrated Satellite-Terrestrial Networks. Sensors. 2019; 19(12):2774. https://doi.org/10.3390/s19122774
Chicago/Turabian StyleYang, Kongzhe, Bangning Zhang, and Daoxing Guo. 2019. "Partition-Based Joint Placement of Gateway and Controller in SDN-Enabled Integrated Satellite-Terrestrial Networks" Sensors 19, no. 12: 2774. https://doi.org/10.3390/s19122774