1. Introduction
Error modeling is the basis of sensor system design. In many fields that emphasize safety, reliability, and integrity, error modeling tends to pay more attention to the tail characteristics of error. It is necessary to ensure that the error model has a thicker tail than the real error distribution so that our hypothesis testing, anomaly detection, and performance analysis process based on the error model can meet the integrity requirements. Especially in the safety-of-life field (such as aircraft precision approach, etc.), conservative error estimation is more important.
As a “patch” of traditional global navigation satellite systems (GNSSs), the basic purpose of a satellite-based augmentation system (SBAS) [
1] includes three aspects. The first is to provide the differential correction parameters of the ephemeris and clock error and the ionosphere delay error to improve the positioning accuracy. The second is to increase the number of available satellites and improve the DOP (dilution of precision) value by adding additional GEO (Geostationary) satellites as range sources. The third is to broadcast the corresponding confidence intervals of the differential corrections, that is, the integrity parameters of user differential range error (UDRE) and grid ionospheric vertical error (GIVE), to provide integrity service for the users (mainly aircraft users) in a wide range. Among them, the most important purpose of SBAS is to improve the integrity application of satellite navigation in the process of aircraft precision approach.
SBAS integrity is based on the fault tree model [
2,
3]. The fault tree helps system builders sort out all kinds of risks and threat models that may cause integrity anomalies. The corresponding fault elimination method is designed (fault elimination here refers to anomaly detection, variance inflation, and other means to reduce or eliminate the impact of the fault on system integrity). Basically, fault tree includes a fault branch and a fault-free branch. The model parameter estimation and protection level (PL) calculation are all carried out under the fault-free branch. The fault branch is mainly responsible for detecting abnormal conditions through various types of monitors and generating alarm marks in time. In this paper, under the framework of the fault-free branch, an efficient and conservative sensor error modeling method is studied to make sure that it can meet certain system risk performance requirements at the same time to achieve a more accurate simulation of the real distribution characteristics.
Many physical phenomena in nature show the characteristics of a Gaussian distribution due to the additive action of a large number of independent random variables. The error model in the form of a Gaussian distribution is widely used. SBAS integrity-related concepts, including error model parameter estimation and protection level equation, are all based on the assumption of a zero mean Gaussian distribution [
4]. Gaussian assumptions have the advantage of simple forms of broadcast parameters, a small amount of data, and convenient user calculation. But in fact, the data are not completely in line with Gaussian distribution characteristics, or do not have enough data to support the verification of the distribution (especially the tail characteristics) of the model [
5]. Scholars have carried out research and proposed a series of overbound methods to solve this modeling problem.
The overbound method actually involves two aspects: one is the relationship between the overbound function and the actual distribution, and the other is the specific form to describe the overbound function. Here, we use an overbound function instead of an overbound distribution to emphasize that it is not required to be a probability distribution function (PDF).
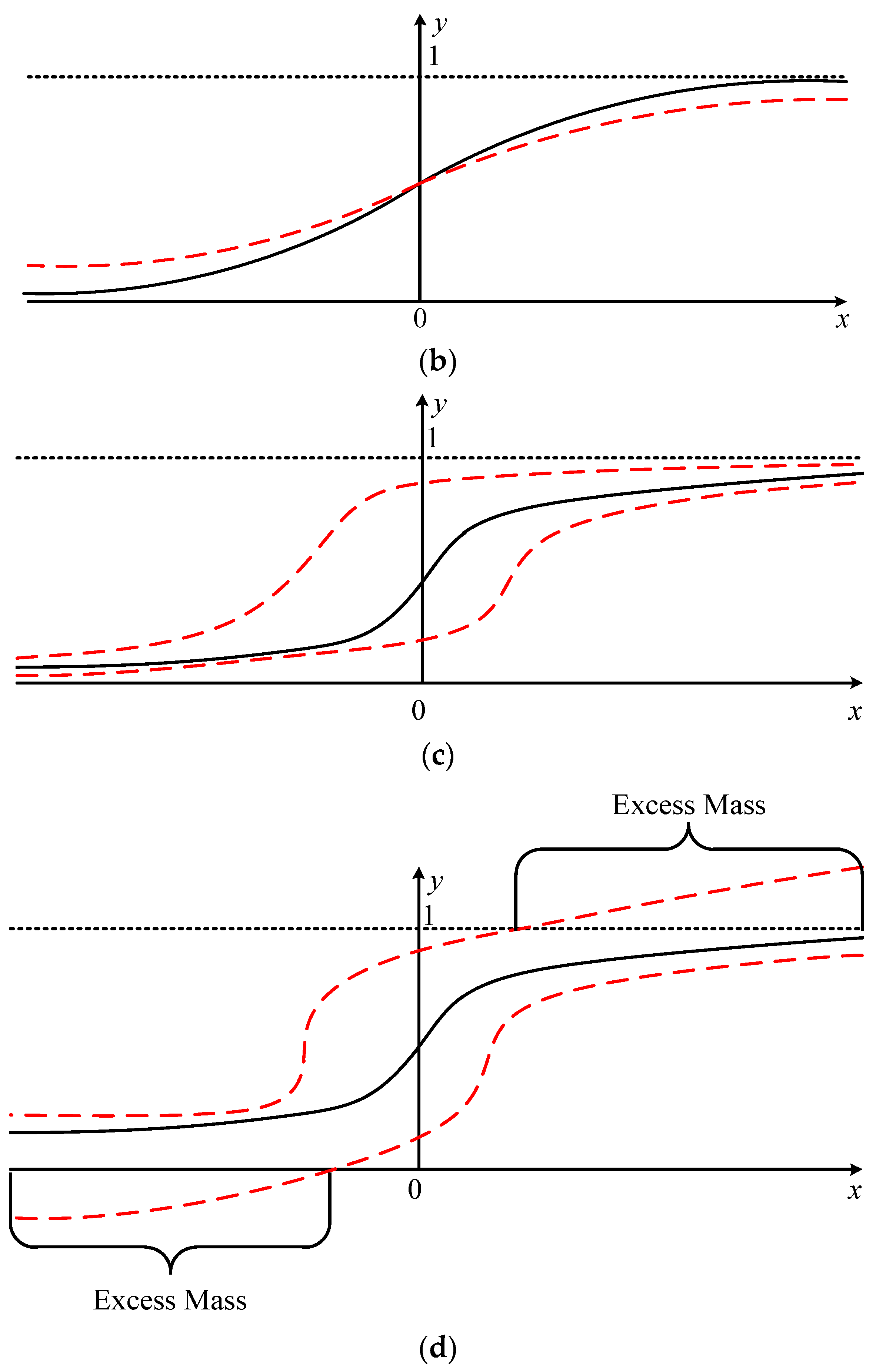
As far as the “relationship” is concerned, it is mainly used to explain what characteristics the established error model should have in order to meet the conservative requirements in the integrity application. SBAS integrity describes the relationship between the actual position error and the protection level calculated by the broadcast parameters. It is defined in the position domain, while the distribution characteristics of the error sources are described in the range domain. The overbound property should be obtained after a convolution operation. The first one is called the tail overbound method [
6], which makes the overbound function (the error model we established) have a thicker tail by assigning a greater probability to the values exceeding a certain threshold. But because the tail overbound method only describes the tail characteristics of the error distribution, it cannot ensure that the overbound property is still valid in the position domain. In order to solve this problem, a cumulative distribution function (CDF) overbound method [
7] is proposed. It requires that the CDF result of the overbound function in the left part is larger than the CDF of the real error. In contrast, the result in the right half is smaller (
Figure A1b). However, the establishment of this method requires that the actual distribution (that is, the real error characteristic) is zero mean, symmetric, and unimodal. In fact, the actual distribution characteristic is difficult to determine. The paired overbound method [
8,
9] is an improvement of CDF overbound. It uses two overbound functions to model the error distribution characteristics from the left and right sides, respectively, which fundamentally solves the problem of the CDF overbound method being dependent on characteristics of the actual error distribution. At present, it has been applied to the error modeling of practical systems. The above overbound methods all require that the overbound function has the characteristics of a PDF (that is, when the value of a random variable tends to the boundary, the result of the probability distribution tends to one). But in fact, the overbound function does not need to have a real physical meaning—it can be regarded as a conservative way to describe the real error characteristics from a mathematical point of view. Based on this consideration, some scholars have further proposed the EMC (excess mass CDF) method [
10]. By removing the restriction that the maximum value of the probability distribution is 1, it effectively reduces the conservatism of the error model and thus improves the availability performance of a SBAS. Although the idea of excess mass was originally used in the paired overbound method, it can also be applied in other methods. The above analyses are aimed at error modeling in the vertical direction and do not take into account the correlation between the errors of epochs; [
11] gives research about these two problems with the help of paired Gaussian overbound functions and the autoregressive first-order model.
For the specific form of the overbound function, in addition to the most basic Gaussian distribution, some scholars have proposed Gauss–Laplace [
12], NIG (Normal Inverse Gaussian) [
13], multi-Gauss [
14], and so on. The purpose of their design is to solve the problem of the Gaussian distribution being too conservative in dealing with heavy-tailed characteristics and to improve the availability of the system. However, the non-Gaussian distribution defined in the range domain cannot lead to an analytical error distribution in the position domain, and a series of numerical methods such as feature domain transformation [
15] need to be used. This will result in greater computational complexity for the user when calculating the protection level results.
All of the above analyses describe the distribution characteristics of error sources in the range domain (or measurement domain). For a LAAS (local area augmentation system), we can even define the error model in the position domain by making use of the property that the heavy-tailed error will gradually approach the Gaussian distribution after many convolution operations, and the availability performance can thus be improved [
16,
17]. However, for a wide area differential augmentation system such as WAAS (wide area augmentation system), the geometric difference in satellite observation between users is large and the error correlation is small, so it is difficult to broadcast the error confidence interval directly from the position domain. At present, the error model used in practical systems such as WAAS and LAAS are still Gaussian distributions. With the construction of dual-frequency multi-constellation SBASs (DFMC SBASs), it will provide an opportunity for error modeling in the form of non-zero mean and non-Gaussian distributions [
18,
19,
20,
21].
In this paper, a modified paired overbound method is proposed, which still uses the left and right functions to overbound the distribution characteristics of the real error but relaxes the requirements of the overbound function, which no longer has to meet the properties of the probability distribution function. It reduces the calculated protection level while meeting the requirements of integrity and thus improving the availability of the system. In the second part of this paper, the purpose and function of the overbound method are analyzed, and several overbound methods (especially the relationship between the overbound function and the actual error distribution) and their applicable scenarios are introduced in detail. In the third part, a modified paired overbound method is proposed, and its overbound properties of single error source and multi-error source convolution are proved and deduced in detail. In the fourth part, the error data obtained from the real ephemeris are analyzed, and the results show that the modified method plays a positive role in improving availability when compared with the traditional paired overbound method. At the same time, we also show the robustness of the modified method in the case of abnormal data loss. In the last part, the main work of this paper is summarized.
3. Modified Paired Overbound Method and Its Integrity
3.1. Modified Paired Overbound Method
The paired overbound method can be applied under arbitrary error distributions, and the problems existing in the hypothesis and verification of the actual error distribution can be effectively avoided. At the same time, it defines the relationship within the whole range of independent variables and can satisfy the convolution requirement when converting from range domain to position domain. However, the left and right parts of paired overbound are required to be greater or smaller than the actual error distribution at the same time, which will make the envelope be too conservative. In addition, the envelope will gradually increase with the increase in convolutions (the number of error sources). As a contrast, the CDF overbound method only takes into account the unilateral characteristics, and the limit function is more approximate to the real error distribution. However, the main problem of CDF overbound is that the actual error distribution must be zero mean, symmetrical, and unimodal. The modified paired overbound method proposed in this paper combines the advantages of CDF overbound and paired overbound. The main idea is to relax the limitation that the overbound function must meet the characteristic of probability distribution and to describe the unilateral relationship. Thus the envelope of the actual error distributions from the left and right overbound functions is better than that of the traditional paired overbound method. In fact, the modified method is the result of “convolution before combination” of the error distributions, which can effectively reduce the overall protection level results and improve the availability of the system.
The following formula gives the description of the relationship between the overbound function and the actual error distribution by the modified paired overbound method.
In
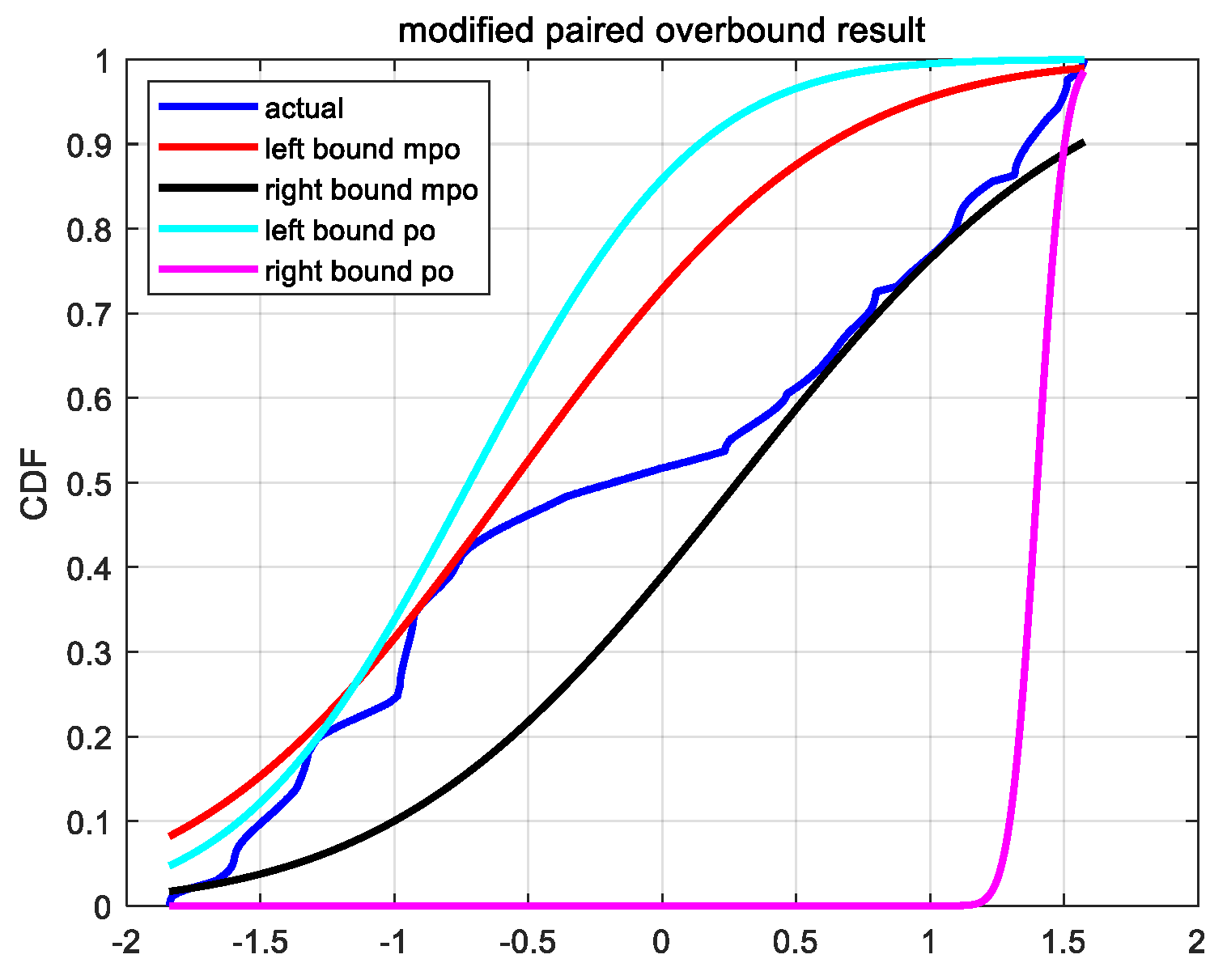
Figure 1, we graphically show the differences between the two overbound methods. We make use of the difference between the precise satellite position provided by IGS (International GNSS Service) and the broadcast satellite position modified by SBAS and obtain the ephemeris error data.
Figure 1 shows the ephemeris errors in the
x direction of the PRN1 GPS satellite. The time is from 2017day121 UT 00:00:00 to UT 12:00:00. The sampling interval is 30 s. More information about the data source and the data pre-processing method is described in
Section 4.1.
In
Figure 1, the dark blue curve represents the empirical CDF obtained from the actual error samples. The light-blue and light-red curves represent the CDF of the left and right overbound function obtained by the original paired overbound (PO) method, respectively. The red and black curves represent the CDF of the left and right overbound function obtained by the proposed modified paired overbound (MPO) method, respectively. As we can see, the overbound function obtained from the modified method is a better approximation to the empirical error distribution. In addition, we need to give two more explanations about
Figure 1. One is that near the 25% quantile (lower left corner in
Figure 1), the MPO and PO methods seem to have their own advantages and disadvantages. The other is that the right overbound function of the PO method seems to be particularly poor. For the first one, the reason is that under the definition of MPO (Equation (8)) and PO (Equation (7)), we could have infinite candidates of (
μ,
σ). As for which candidate (
μ,
σ) is selected, this is strongly related to the optimal criterion. Here, we choose the candidate that has the smallest difference with the empirical CDF. Therefore, at some quartile points, it does not exclude that the overbound CDF obtained from the PO method is closer to the empirical CDF. For the second one, it is actually determined by the characteristics of the empirical CDF, and the thicker the tail of the empirical CDF, the more obvious this phenomenon is. This also verifies the necessity of the MPO method proposed in this paper from another aspect.
The correctness (conservatism for a single random variable and sum of variables) of the modified paired overbound method is explained below.
3.2. Overbound Property for a Single Error Source
In this subsection, we will prove that the overbound function obtained by Equation (8) is a conservative estimate of the actual error distribution. That is, it should be explained that the following formula is valid.
The subscripts l and r represent the left and right overbound functions, respectively, and the superscripts o and a represent the overbound distribution and the actual error distribution, respectively (here we use o instead of m in Equation (1) to emphasize that the error estimate is a kind of overbound estimation).
According to the definition in (8), we have that
And because the CDF
Ga is increasing, we have that
Similarly, for the right part we have,
Thus, the Equation (9) can be proved.
3.3. Overbound Property after Convolution
Here, we prove that the overbound property still holds after the convolution operation. The linear operation includes addition and multiplication operations, and the random variable multiplied by a constant will not affect its distribution. Therefore, here we mainly explain the relationship between the original error distribution and the distribution after the addition operation. Take the case of an addition of two random variables as an example.
where
m and
n represent two random errors, and
Lm is the left overbound function. By subtraction, we have that
From Equation (8), we know that the result of the above equation is always greater than 0. That is to say, when the error distribution is overbounded at the beginning, it is not necessary to overbound the whole range of independent variables as in the traditional paired overbound method, but the final result can still achieve the effect of the traditional one. And the same is true for the right part.
3.4. Trade-off between Mean and Standard Deviation
For the paired overbound method, there are two variables: bias and standard deviation. For a certain VPL result, the corresponding error distribution is no longer unique. The conservatism requirement can be satisfied (overbound the existing sampling points) both by increasing the bias term or the standard deviation term. The following figure shows an example.
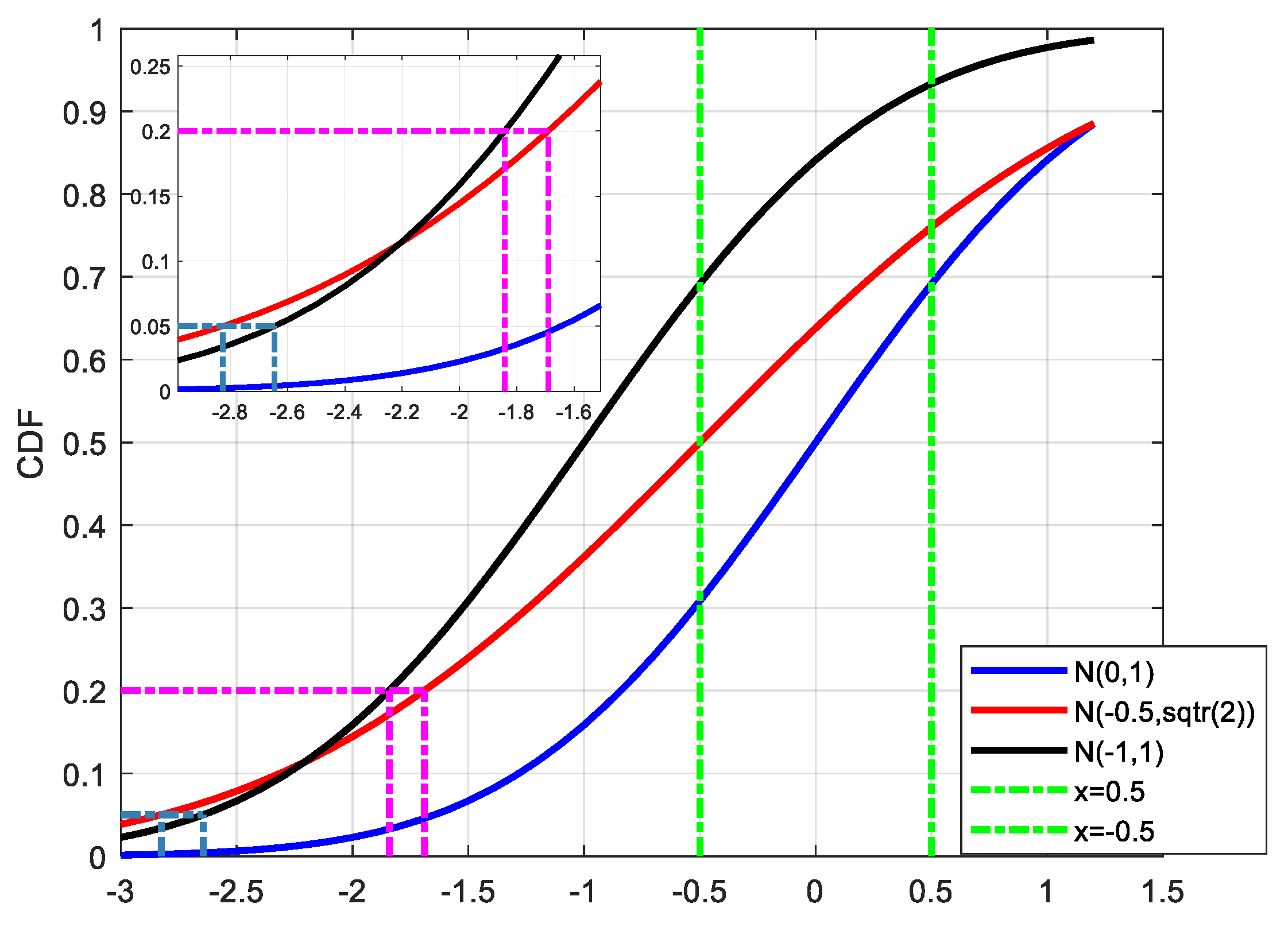
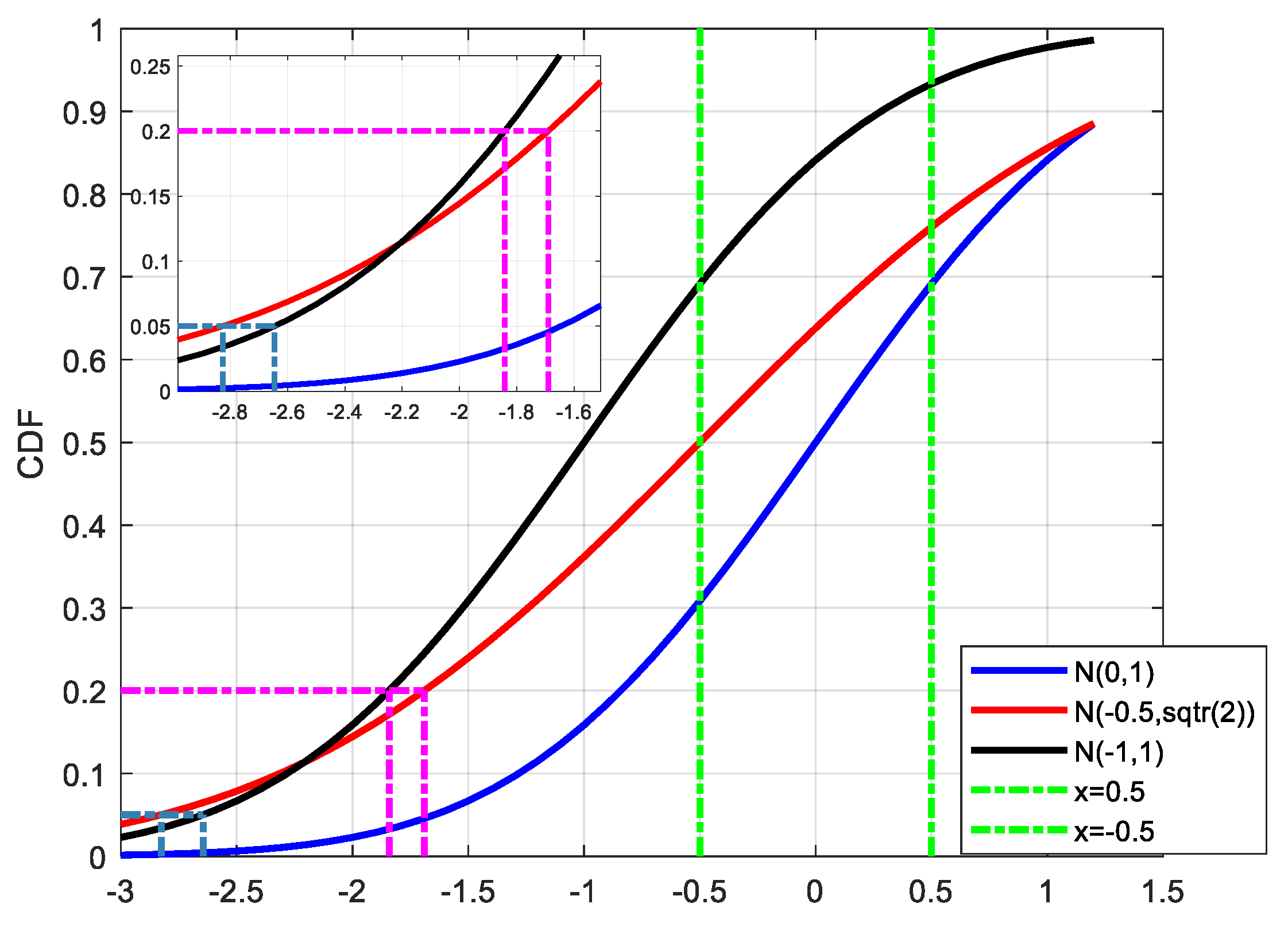
In
Figure 2, the blue curve represents the actual error distribution, which obeys the standard Gaussian distribution with a mean value of 0 and a standard deviation of 1 (N(0,1), N stands for the Gaussian distribution). Assuming that the samples are randomly sampled from N(0,1) with a range of [−0.5 0.5], the maximum value of the samples is no bigger than 0.5 and the minimum value of the samples is no smaller than −0.5. When doing overbounding, we should make sure that all the samples are satisfied with the definition of the overbound method.
The red and black curves represent the CDF results of N(−0.5,) and N(−1,1), respectively, which both can be regarded as overbound results for N(0,1) with the samples in the range of [−0.5,0.5]. (In this case, the left part is taken as an example.) It can be seen that under the case of P = 0.05, the corresponding percentiles of N(−0.5,) and N(−1,1) are −2.8262 and −2.6449, respectively, and thus the overbound function N(−1,1) will be regarded as a better choice for its smaller percentile result (in its absolute form). However, under the case of P = 0.2, the percentiles of N(−0.5,) and N(−1,1) are −1.6902 and −1.8416, and thus the overbound function N(−0.5,) will have better availability. It can be seen that we may get a different conclusion on the choice of an overbound function under a different probability, and it is inappropriate to evaluate the modeling performance just relying on a few points.
The trade-off relationship between mean and standard deviation in the paired overbound method is found in the literature, but there is no detailed explanation of how we should evaluate the performance of the overbound function at this time. Here, we need to make a detailed analysis of this problem.
The trade-off between
σ and
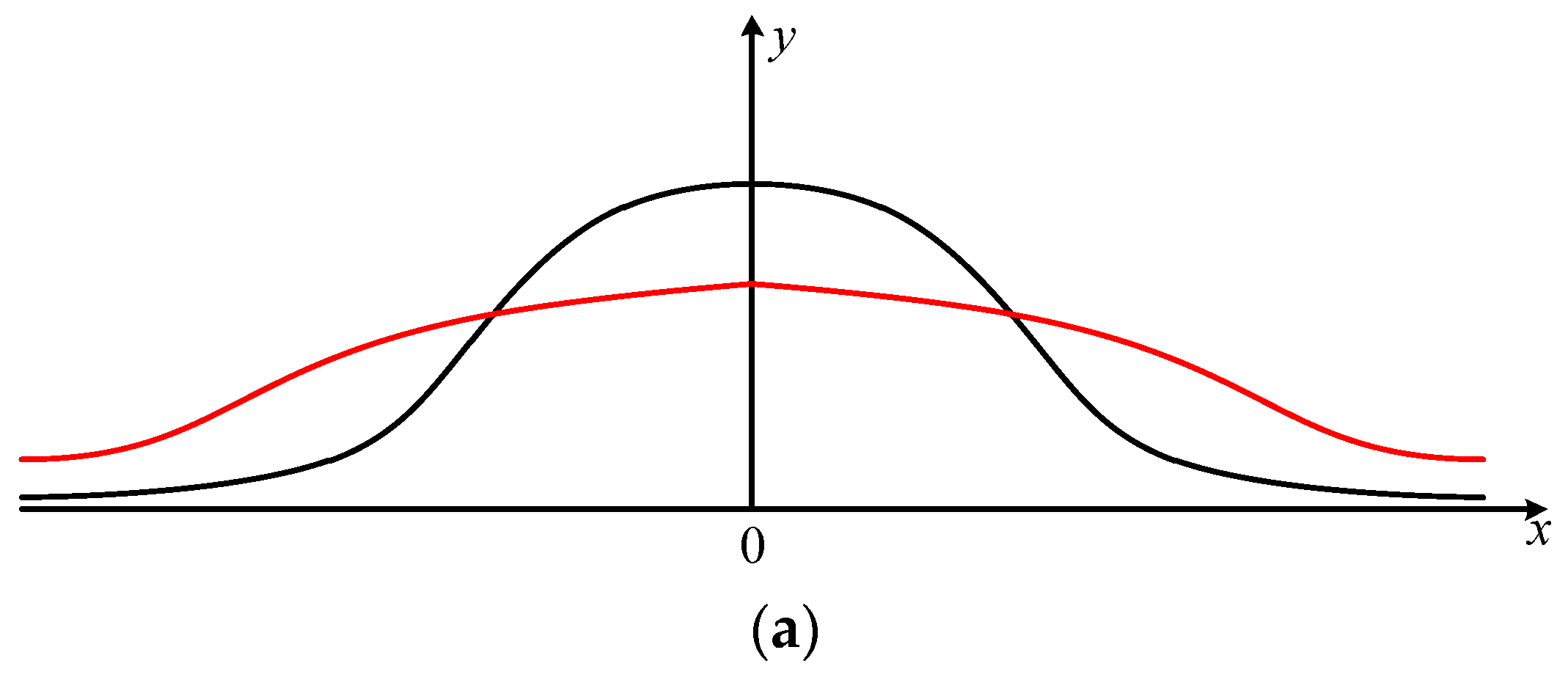
μ is an intuitive external representation, and its inner embodiment is the trade-off between availability and integrity. As shown in
Figure 2, for the case where the actual error is heavy-tailed, either increasing the mean or the standard deviation of the Gaussian distribution could achieve the purpose of overbounding, but their performances are different. In the extreme case, the characteristic of the overbound function obtained by increasing the mean value tends to reach that of a step response (the CDF of a pulse function). Suppose that the jump in the CDF of a step response is
x =
x0. This means that the data with an absolute value bigger than
are all regarded as “unavailable”. It is similar to the concept of hard cut-off. If
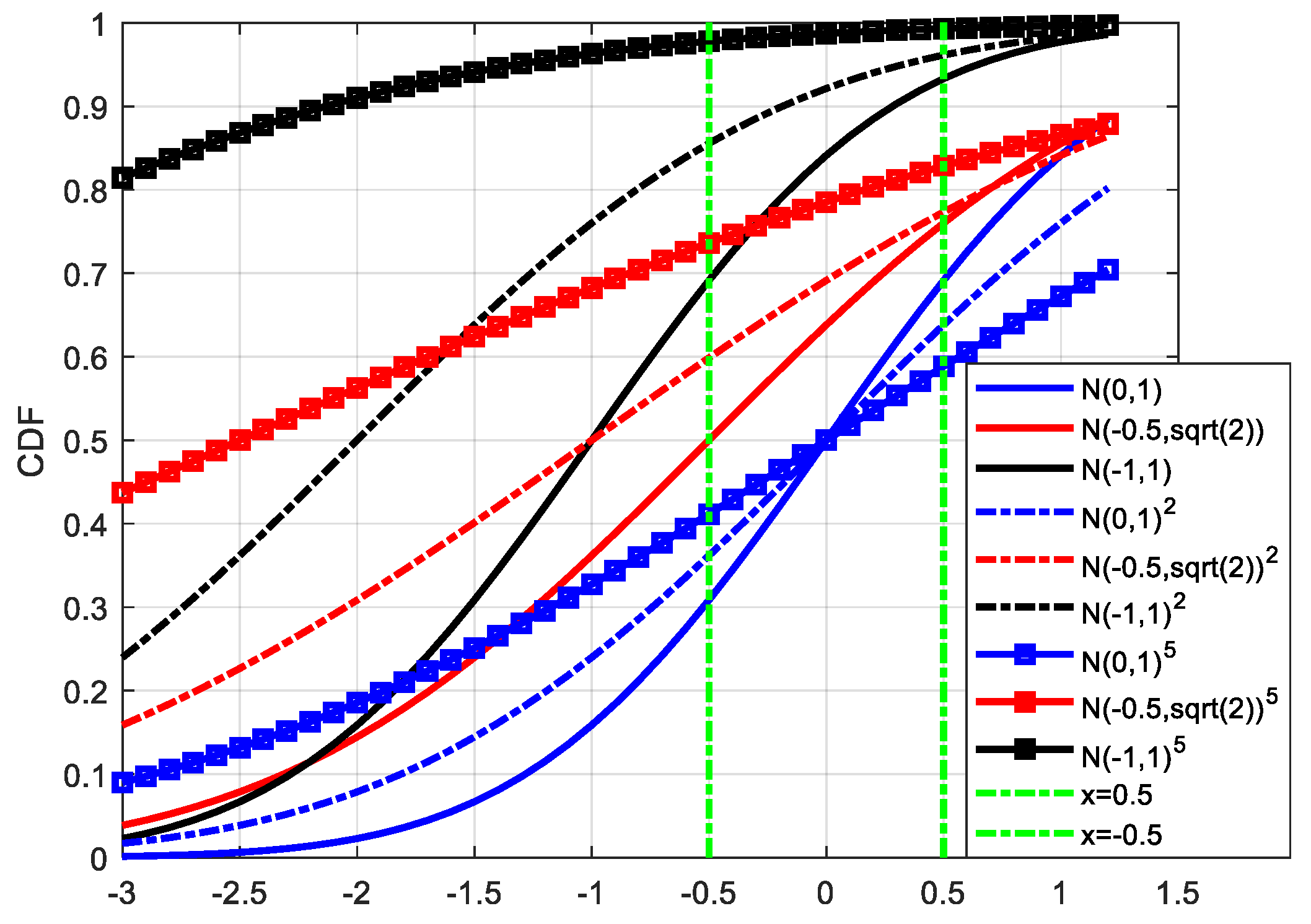
x0 is too small, the availability will be harmed, and if it is too large, it will affect the integrity of the system. Besides, multiple convolutions are involved in the conversion from range domain to position domain. With the increase in convolutions, the problem caused by excessive dependence on the mean of the Gaussian distribution will become more serious. The following figure shows the relationship between the overbound function and the actual error after 1, 2, and 5 convolutions.
In
Figure 3, blue, red, and black curves represent the distribution of N(0,1), N(−0.5,
), and N(−1,1), respectively. Solid lines, dashed lines, and lines with square markers represent the results after 1, 2, and 5 convolutions, respectively. It can be seen from the figure that with the gradual increase in convolutions, the difference between the overbound function and the actual error is greater, and the distributions are approaching the CDF of a step response, especially for the overbound function with a larger mean value. In this case, although the corresponding percentiles are smaller under some probabilities, it should not be considered a good model of the actual error.
Here, we introduce the concept of
EVPL to illustrate the overall performance of the overbound function in the whole probability value space, namely [0,1]. It is defined as
where
pi denotes probability, and
VPL(
pi) denotes the percentile corresponding to
pi under the standard normal distribution. In discrete form, it can be expressed as
Below, we will start with this indicator to analyze the performance differences between the improved method proposed in this paper and the traditional paired overbound method.
4. Performance Analysis
4.1. Data Collection
In this paper, we take the overbound of satellite position error as an example. The difference between the precise ephemeris data provided by IGS [
31] and the broadcast ephemeris which is corrected by SBAS (in this case, EGNOS). The EGNOS augmentation information comes from the EGNOS Message Service (EMS) [
32], which is provided by ESA (European Space Agency). The constellation is a GPS constellation. For availability performance analysis, it is assumed that users are located in the ECAC (European Civil Aviation Conference) [
33] area, whose longitude range is −40°~40° and latitude range is 20°~70°. Users are distributed in a grid mesh, and the grid resolution is 1° × 1°. The date is from 27 April 2017 (day117) to 3 May 2017 (day123), a total of 7 days. To avoid correlation between the data, the sample interval is selected as 600 s.
4.2. Generation of Overbound Parameters
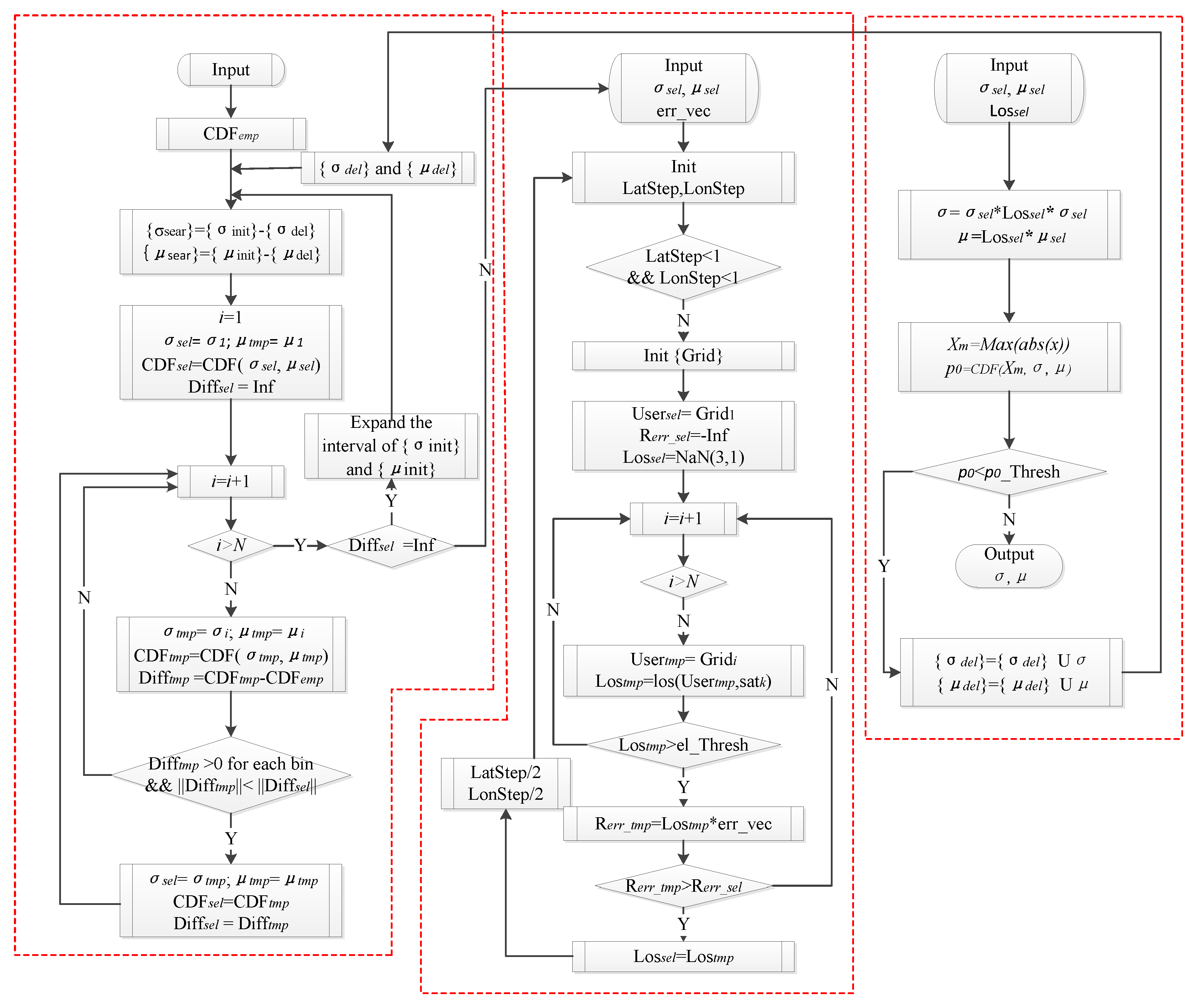
After getting the error samples, we then get the parameters of the overbound function. The detailed procedure is shown in
Appendix A. It is mainly divided into the following three parts: overbounding the error in a single direction, finding the worst user location in the range domain. and hypothesis testing of the results.
1. Calculate overbound results in the x, y, and z direction.
We take the x direction as an example. For the error sample set of each satellite, the search range and search step of the parameters and are first set, and we look for a parameter pair (,) that brings the CDF result closest to the empirical CDF. At the same time, this (,) must meet the requirement that the overbound function is not less than the empirical CDF. If such a (,) does not exist, we should then increase the search range until the appropriate parameters are successfully found or the number of searches reaches the setting threshold.
2. Find the worst user location in the service area and obtain the scalar overbound result in the range domain.
When the overbound results are obtained in each of the three directions, if the value in any direction of a satellite is empty, the UDRE of the satellite at that time is marked as “Do not use”; otherwise, the worst user location (WUL) needs to be calculated and the scalar overbound result in the range domain needs to be generated. The methods of calculating the WUL can roughly be divided into two parts: the exhaustive search method and the geometric calculation method [
34]. Here, our main purpose is to verify the performance of the modified paired overbound method, so we choose the exhaustive search method for its simplicity.
Specifically, first we need to calculate the observation vectors from the users to satellites. Then we get the corresponding scalar error in the range domain by combining the observation vector with the ephemeris error vector. At last, the WUL vector
, corresponding to the maximum error in the range domain that satisfies the elevation threshold, is found. The overbound parameters (
,
) in the range domain can be calculated according to the following equations.
3. Hypothesis test of the obtained results
The overbound results in the range domain for each satellite at each time can be obtained by the above two steps, which need to be further tested to meet the requirements of false alarm and misdetection. The hypothesis test is based on the fact that an event with a small probability hardly occurs, and if it does occur under a hypothesis, it is reasonable for us to believe that the hypothesis itself is wrong. In the hypothesis test, the conclusion of “reject H0” is more persuasive. “Accept H0” does not mean that H0 must be correct, but that there is no contradiction between the observation and H0. Therefore, if we want to use the hypothesis test method to prove the validity of a conclusion, it is best to raise the H0 hypothesis to “the conclusion is not true”. If it is refused, then the conclusion is credible.
Based on the above considerations, we make that
where
ptail represents a probability of exceeding a certain
X0, that is, the tail probability for the actual error distribution.
p0 is calculated from the overbound parameters estimated above.
The test statistic
T is defined as the number of times in the sample set the absolute value of error exceeds
X0. If H1 is true, namely, the actual tail probability
ptail is less than
p0, the number of large deviations should be small. Thus, the rejection domain has the form
We calculate the value of threshold C according to the requirement of false alarm.
Here, we choose X0 = max(X). If the hypothesis test fails, the first step is to return to estimating the overbound parameters, and the search range of and should be adjusted accordingly.
4.3. Availability Performance
4.3.1. Overbound Property for a Single Error Source
First of all, we compare the difference between the overbound functions obtained under the traditional paired overbound method and the modified paired overbound method, and the empirical error CDF. First, we need to define a proper metric to describe this kind of difference. It should at least satisfy the following four characters:
- ■
Since both the MPO and PO methods are defined from the perspective of the CDF, it is natural for us to define a metric from the point of view of the CDF to describe the difference between the overbound function and the empirical CDF.
- ■
In order to maintain the overbound property when transferring from range domain to position domain, one of the most basic requirements is that the overbound function should be defined within the entire range of independent variables. Thus, we want to define it not only in some special positions (like the traditional total variation distance [
35]), but also
in the entire range of independent variables.
- ■
The metric needs to have unique zero points. That is to say, if and only if the overbound function and the empirical CDF are the same, the result of the metric is zero. Otherwise, it will be difficult to define what is the best approximation of the empirical CDF. Thus, some metrics that are based on the PDF (like the Kullback–Leibler divergence [
36]) cannot be selected.
- ■
Because integrity actually places more emphasis on overbounding for the sampling points that are far from the core part and with a very small probability of occurrence, we do not want to weigh the divergence according to its probability. That is the reason why we did not choose a more “standard” Carmer–von Mises [
37] distance.
Based on the reasons above, we use the concept of sum of difference (SUMD) to describe the difference, which is defined as
In the following
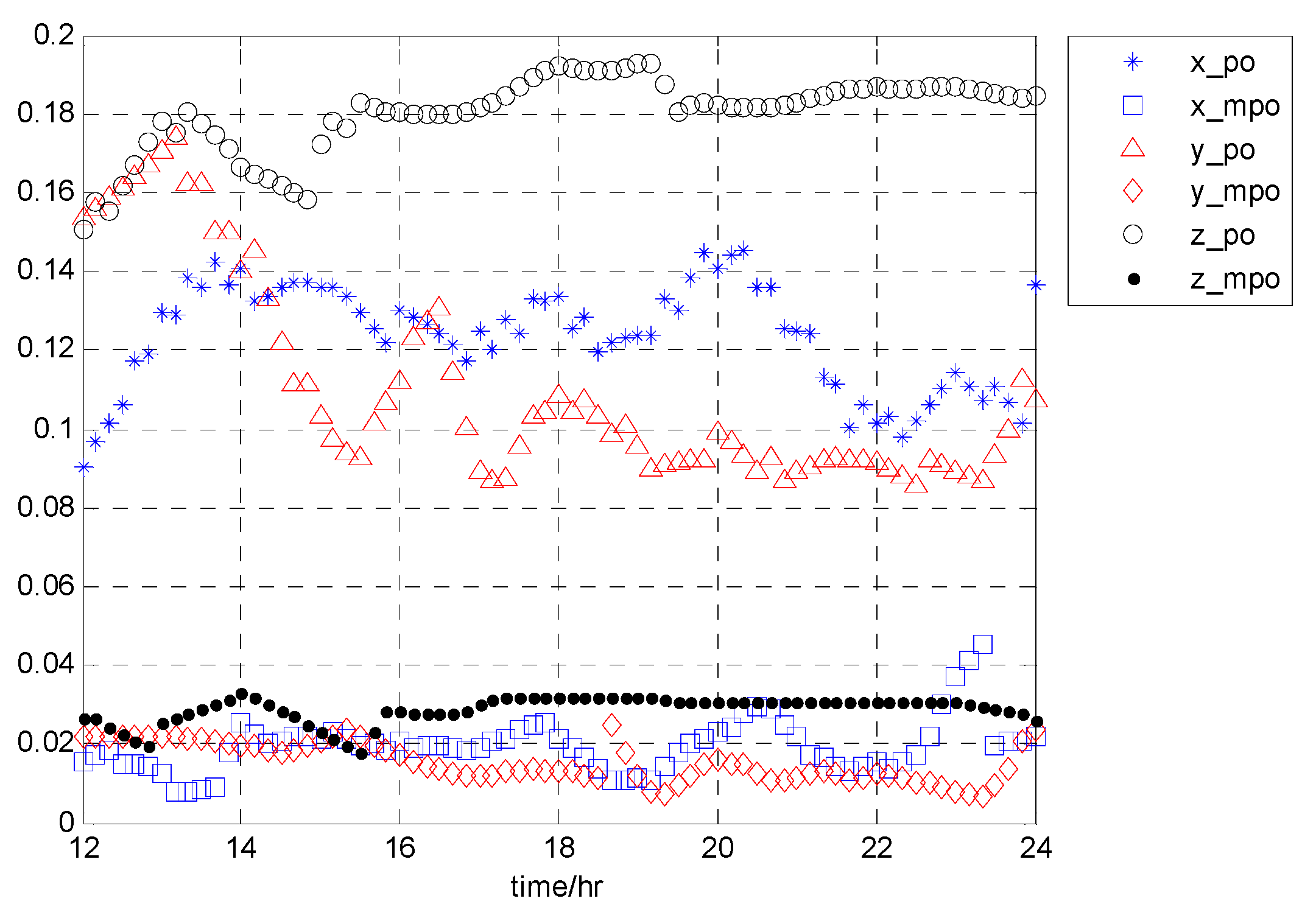
Figure 4, satellite PRN1 is taken as an example to show the variation of the CDF difference with time (2017day121 UT12:00:00~24:00:00) for the two overbound methods. Blue, red, and black curves represent the results in the x, y, and z directions (in the ECEF (Earth Centered Earth Fixed) coordinates frame), respectively.
The horizontal axis represents time with a resolution of 1/6 h. The vertical axis represents the SUMD results, which have been averaged over the whole range of independent variables. Using the data of the first 12 h, we estimate the overbound result of the current epoch. The overbound results vary slowly with time. It can be seen that compared with the traditional PO method, the MPO method proposed in this paper can better approximate the empirical CDF in three directions. Furthermore, in
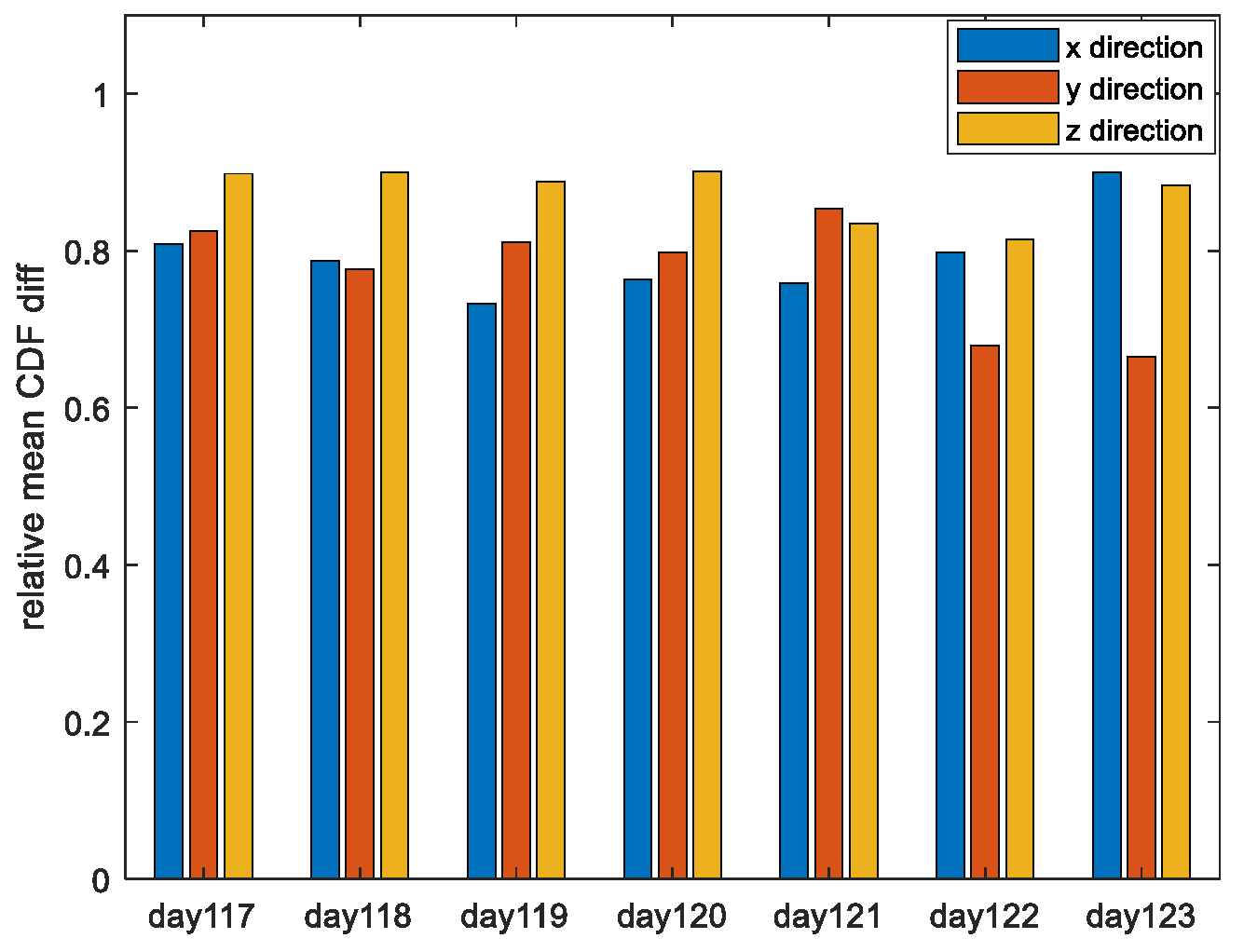
Figure 5, we statistic the performance improvement of our proposed PO method under the SUMD index.
The date is from 2017day117 to 2017day123. Taking satellite PRN1 as an example, the rate of performance improvement with the MPO method compared to the PO method for all three directions of the two paired overbound methods is shown.
It can be seen that when the single error source is overbound, the method proposed in this paper can obtain a more accurate approximation of the actual error distribution than the traditional method when the overbound requirements defined in Equations (7) and (8) are satisfied. Specifically, under the experimental conditions given in this paper, the mean difference between the overbound function obtained by the traditional paired overbound method and the empirical error distribution in the x, y, and z directions are 21.09%, 12.29%, and 14.06%, respectively. (The results of other valid satellites are similar to those of PRN1.) The mean differences obtained by the modified paired overbound method are 4.48%, 2.73%, and 1.79% for the three directions. The increase is not less than 70%.
4.3.2. Overbound Property in the Position Domain
Above, the performances of the two paired overbound methods on a single error source are analyzed in the range domain. Using the MAAST tool [
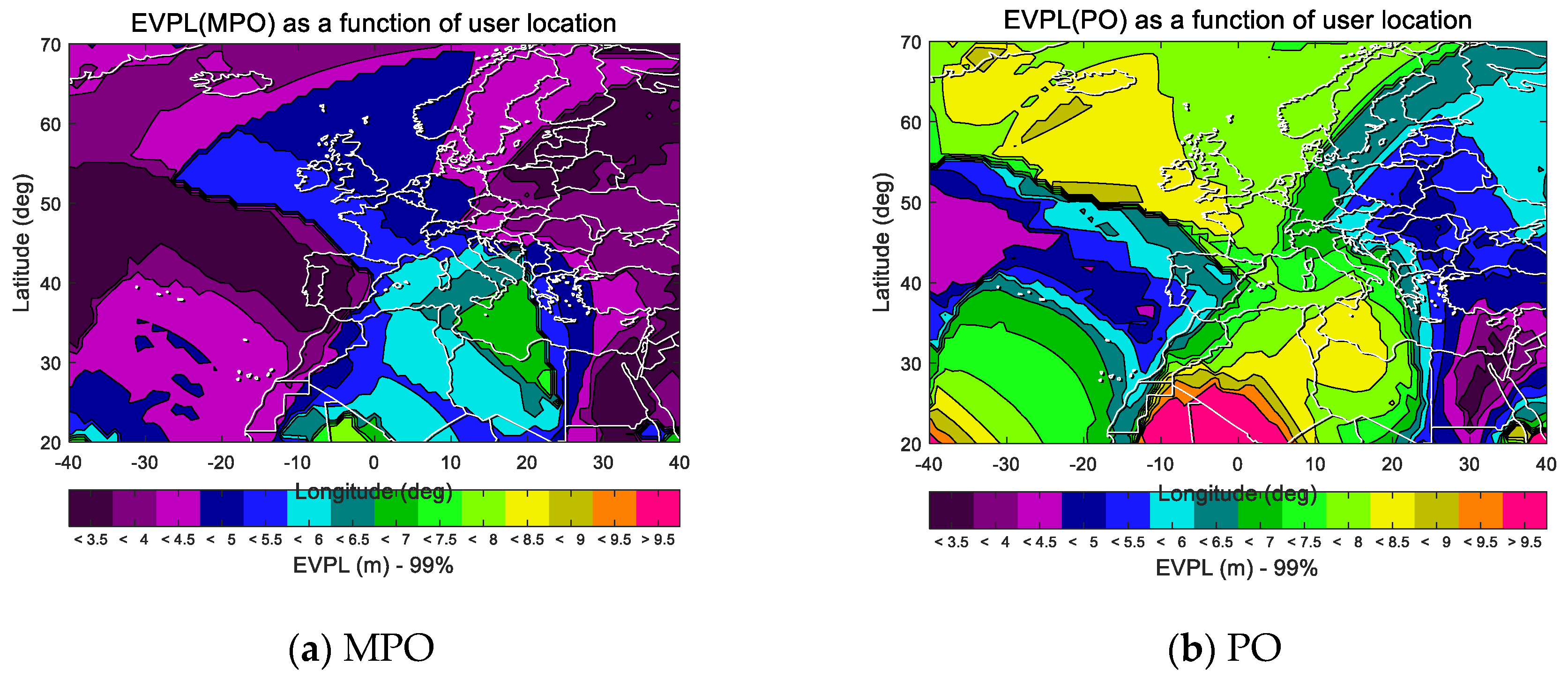
38], we further compare the difference in availability between the two overbound methods (that is, the error distributions of multiple error sources after convolution). Under the experimental settings given in
Section 4.1, the following
Figure 6 show the EVPL results of users in the ECAC area at a 99% time ratio in the case of 2017day121. The definition of the EVPL metric and the reasons for using it for availability evaluation are described in detail in
Section 3.4.
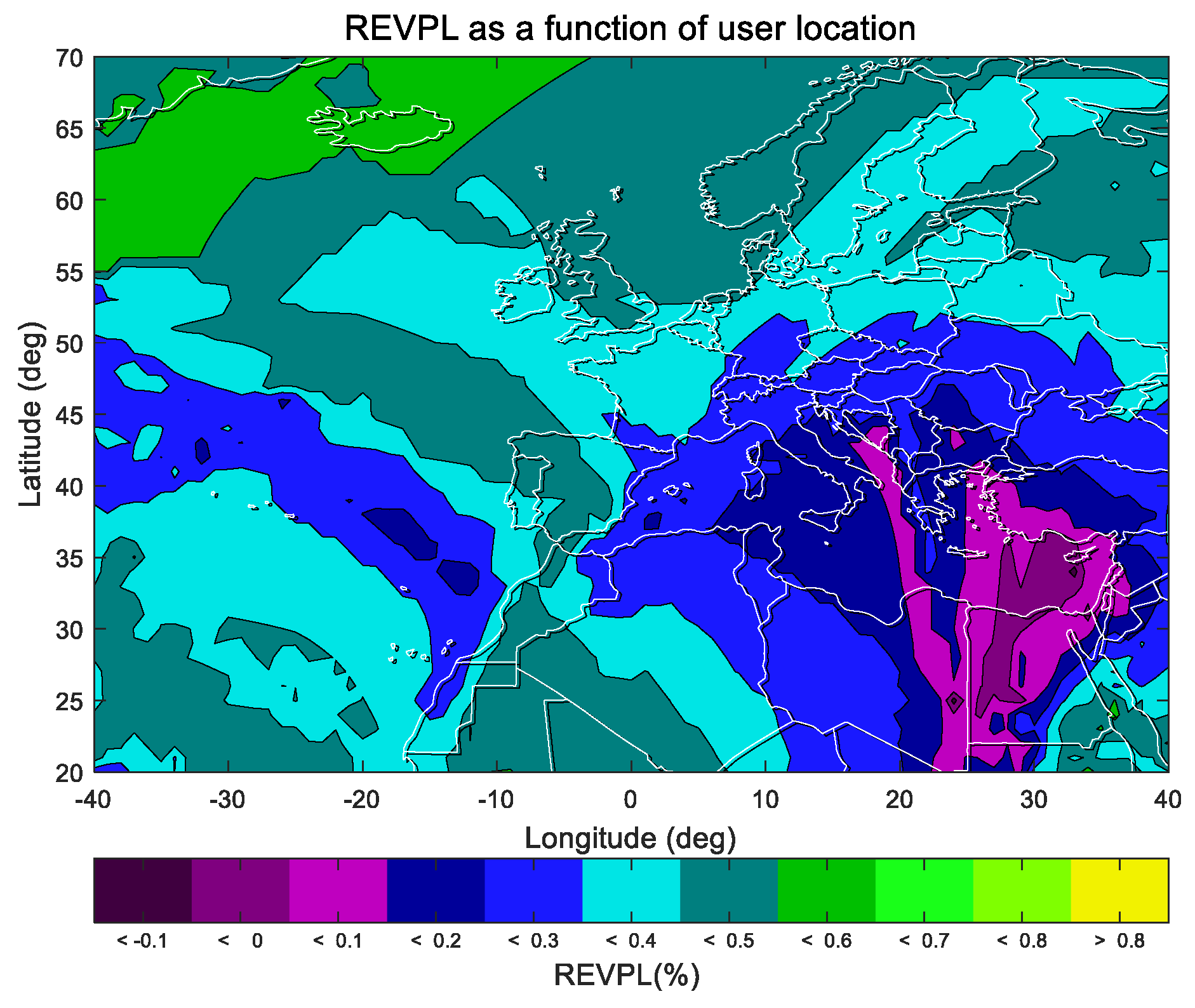
The indicator relative EVPL (REVPL), measuring the ratio of performance improvement, is defined as
where
xi represents the user location,
EVPL is the indicator defined in
Section 3.4, and the subscripts
po and
mpo correspond to the traditional paired overbound method and the modified paired overbound method.
pct represents the percentage of time and is used to obtain the
EVPL(
pct), which is the percentile under a probability of
pct. The REVPL result is shown below.
Statistics are provided to show the proportion of users with different rates of growth.
Table 1 describes the difference between EVPL results obtained from the MPO and PO methods (REVPL in Equation (26)) for all the users located in the ECAC area. The first row in the table represents the intervals in which the REVPL results are located. The second row represents the percentage of users falling into the corresponding interval in the ECAC area. According to the definition of Equation (26), if the REVPL value is greater than 0, the smaller the EVPL results from the MPO method, which means a higher availability. It can be seen that in about 99% of the regions, the results of the REVPL are greater than 0, which indicates the better availability performance of our proposed MPO method. In
Table 2, Further statistics are provided on the proportion of users in intervals with different rates of growth during 2017day117 ~ 2017day123. Here, the interval given in
Figure 7 is adjusted to merge some of the intervals with smaller proportions.
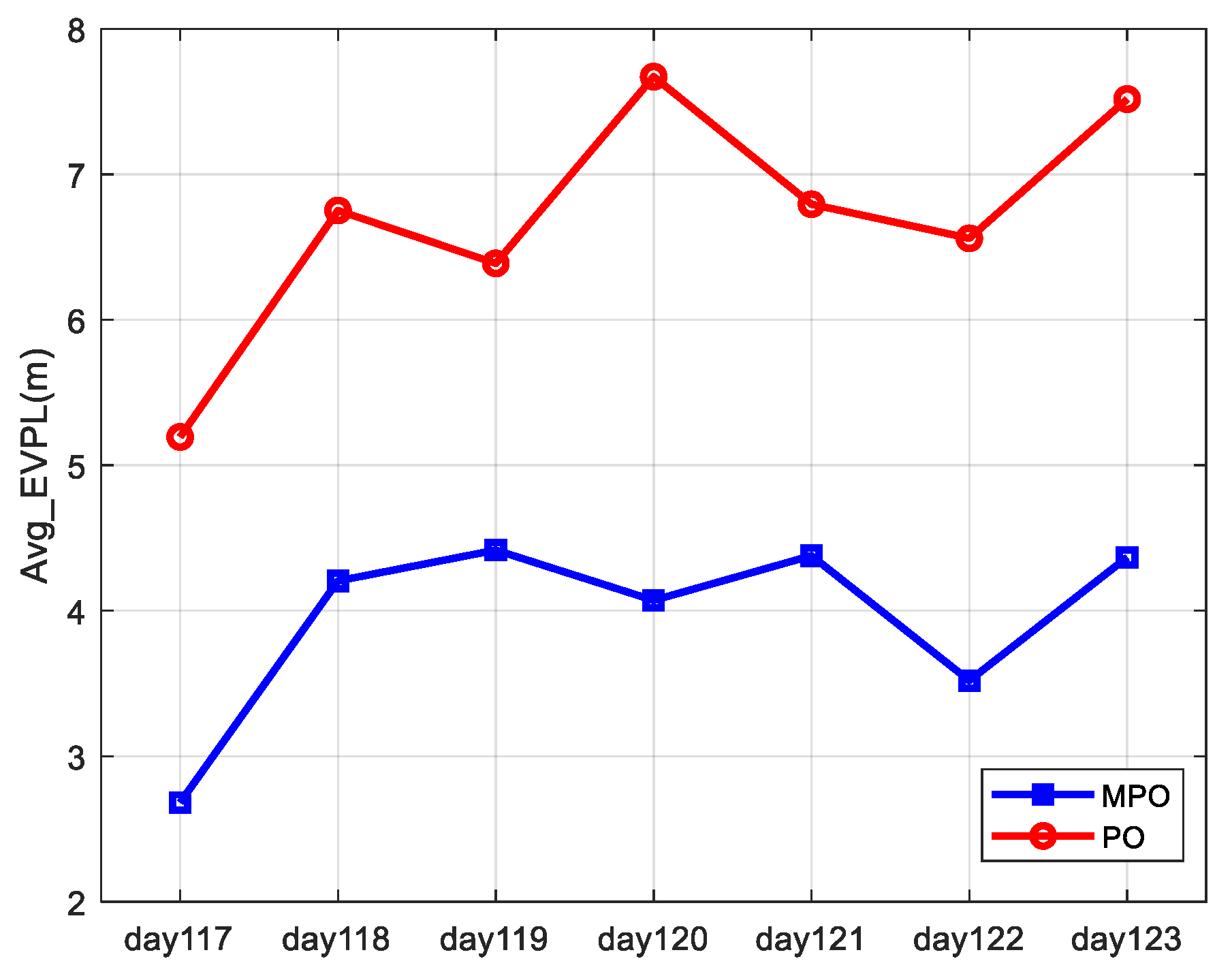
The average EVPL (99%) results for all users in the service area are analyzed as an overall description of the availability of the two paired overbound methods. As shown in
Figure 8, the horizontal coordinates are the analysis date, and the vertical coordinates are the average EVPL (99%) results. The blue and red curves represent the results obtained by the MPO and PO methods.
The daily average EVPL (99%) results are not exactly the same because the distribution of satellite error corrected by SBAS is different on different dates. Comparing the results obtained by the MPO and PO methods, we can see that the two results have similar trends, indicating that both of them can correctly reflect the actual error characteristics but that the MPO method can lead to a better availability performance.
4.4. Robustness for Large Errors
This section will show that in addition to availability, the improved paired overbound method proposed in this paper is more robust to large deviations. That is, assuming that for a certain set of error samples, pairs of overbound parameters are obtained by using the MPO and PO methods described above, the parameter (σ,μ) corresponding to the MPO method can “tolerate” larger deviations. The content of this section can be divided into three parts. First, we define the robustness of overbound to large deviations (here, a large deviation means that the value is far from core of the distribution). Secondly, the robustness of the overbound results is quantitatively described by the index of “maximum allowable deviation”. Finally, the performance difference between the proposed MPO method and the traditional PO method in terms of robustness is compared by using the defined “maximum allowable deviation”.
Generally speaking, robustness refers to the nature of a system that can still work properly under abnormal circumstances. For conservative error overbounding, because SBAS integrity places more emphasis on the conservative modeling of sample data that are far from the core and have a small probability of occurrence, the influence of the loss of a “large deviation” sample on the result is far from the influence of the loss of a sample that is near the core of the distribution. Thus, we define the robustness of conservative error overbound as: when a “large deviation” sample is lost, the overbound property could still be guaranteed by using the overbound result that is generated from the remaining data.
This problem can be expressed in mathematical form as follows: for a certain data set {
Xi},
I = 1, 2, …,
N. The overbound parameters obtained by the MPO and PO methods are (
) and (
), respectively. Under a certain integrity risk (the missed detection probability)
, the tolerable maximum deviation is
where
Q(·) is the CDF function of the Gaussian distribution. The larger the
Xmax value, the greater the maximum allowable deviation, and the stronger the robustness.
We will show that there is a great chance that the tolerable maximum deviation Xmax_mpo obtained by the MPO method is greater than the result Xmax_po corresponding to the PO method. That is, if a sample with “large deviation” is mistakenly lost in the process of error data collection or model parameter estimation, the parameters obtained by the MPO method can provide a more robust overbound result.
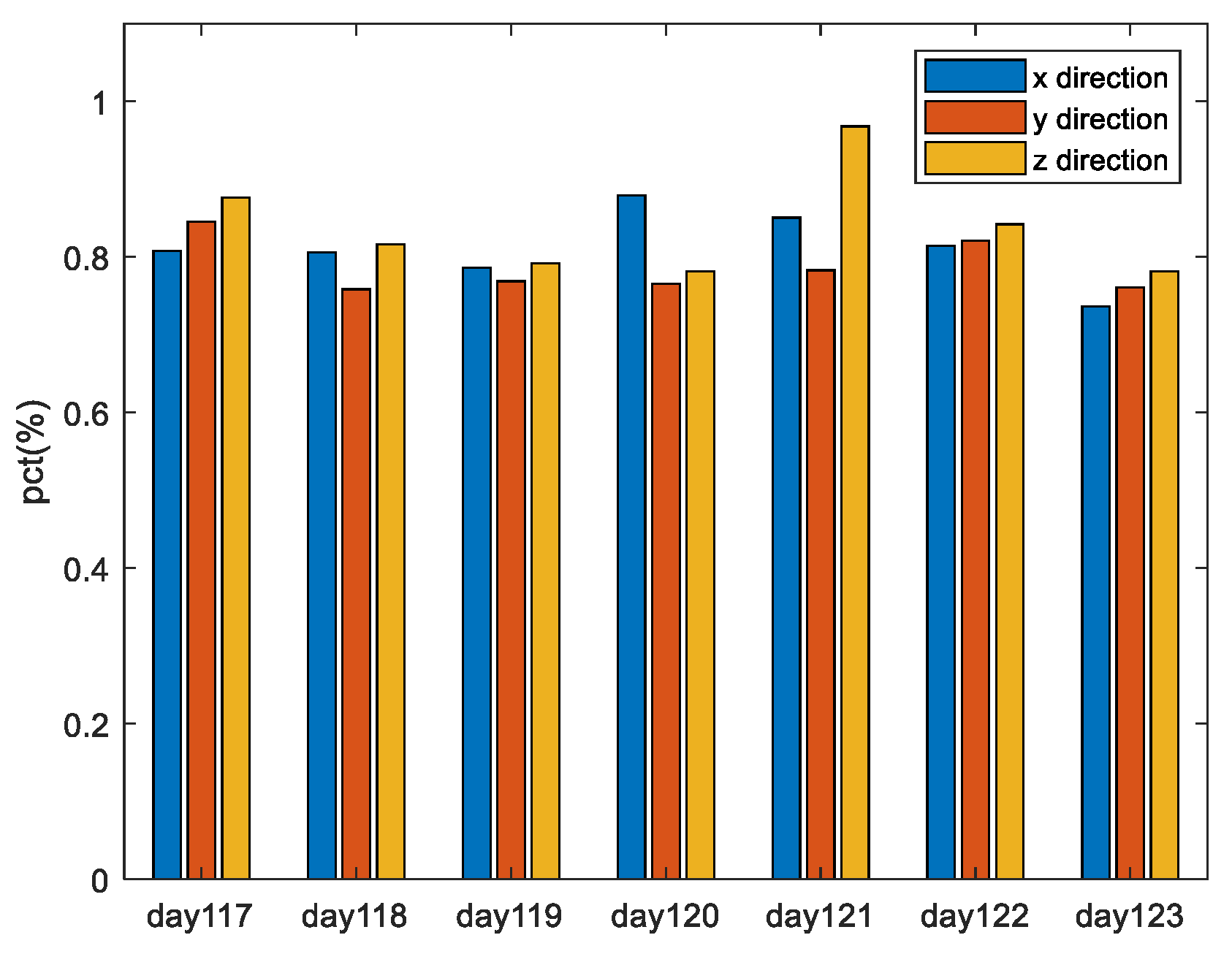
Here, we use the experimental settings in
Section 4.1 to obtain the ephemeris error results of each satellite in the ECEF coordinate system in the three directions; the time is from 2017day117 to 2017day123. We first use the PO and MPO methods to get the overbound functions and then calculate the “maximum allowable deviation” according to Equation (27). Finally, we calculate the probability that the
Xmax_mpo is bigger than
Xmax_po for all the satellites per day. As shown in
Figure 9, the horizontal coordinates are the date, and the vertical coordinates represent the probability that the
Xmax_mpo is greater than the
Xmax_po. Blue, red, and yellow bars represent the results in the three directions of x, y, and z, respectively. It can be seen that the results are similar in the three directions, and the probability that
Xmax_mpo is bigger than
Xmax_po is more than 70% for all days under analysis. That is to say, the MPO method proposed in this paper has “stronger” robustness to large deviations than the PO method, with a probability of more than 70%.













{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}