Multifunctional Ground Control Points with a Wireless Network for Communication with a UAV


Abstract
:1. Introduction
2. Materials and Methods
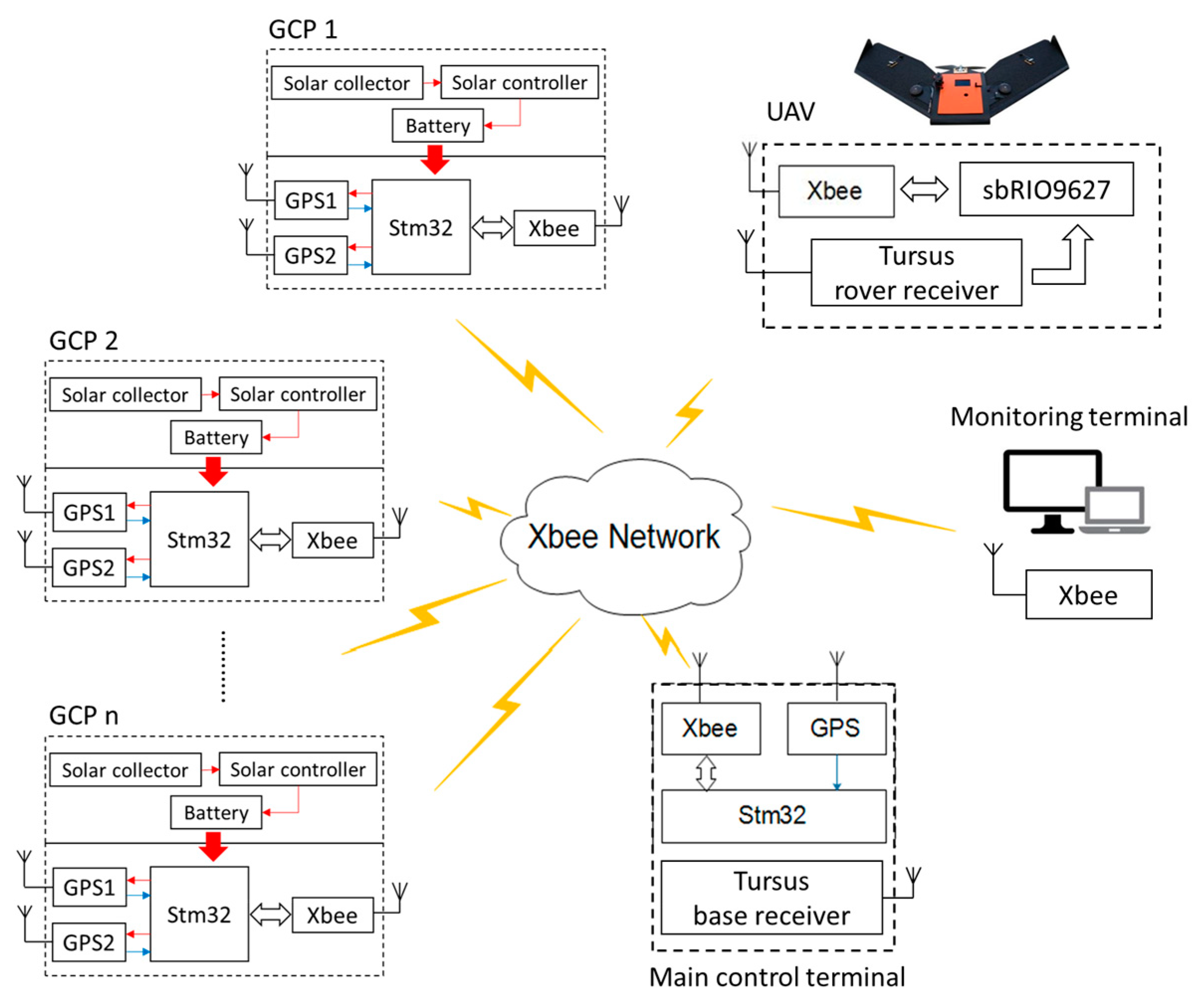
2.1. System Architecture and Principles
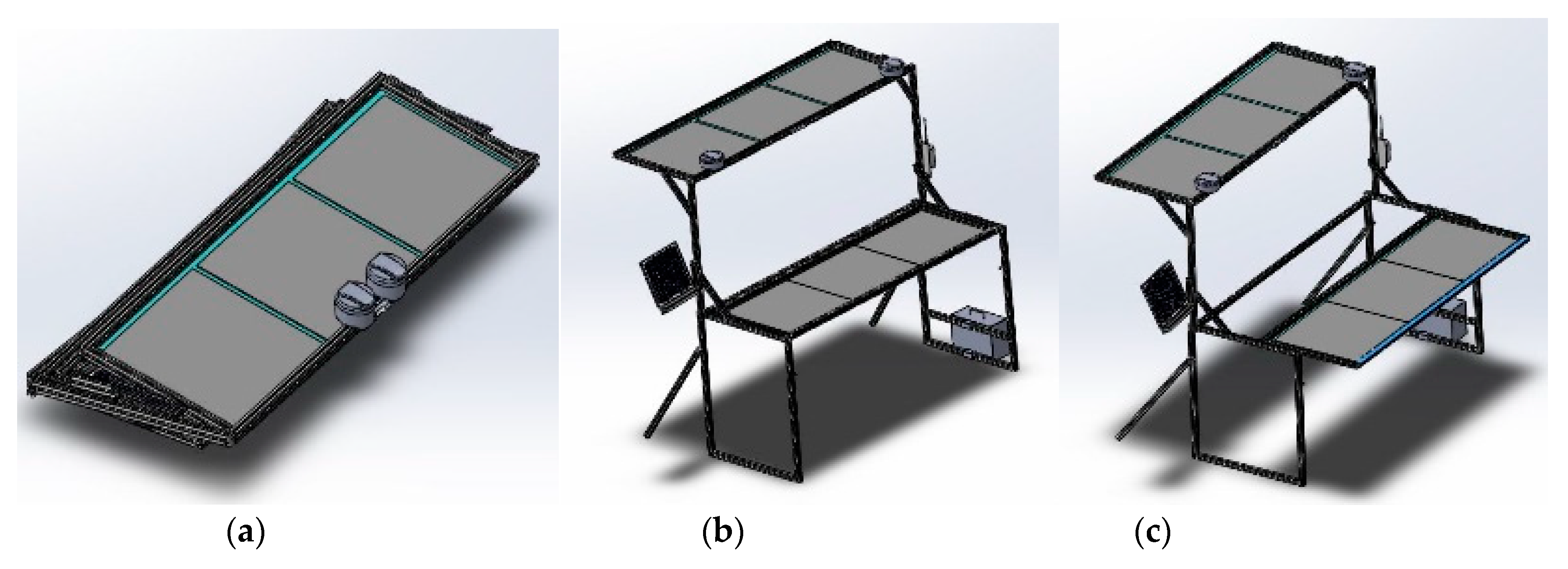
2.2. GCP Structure
2.3. Data Processing Strategy
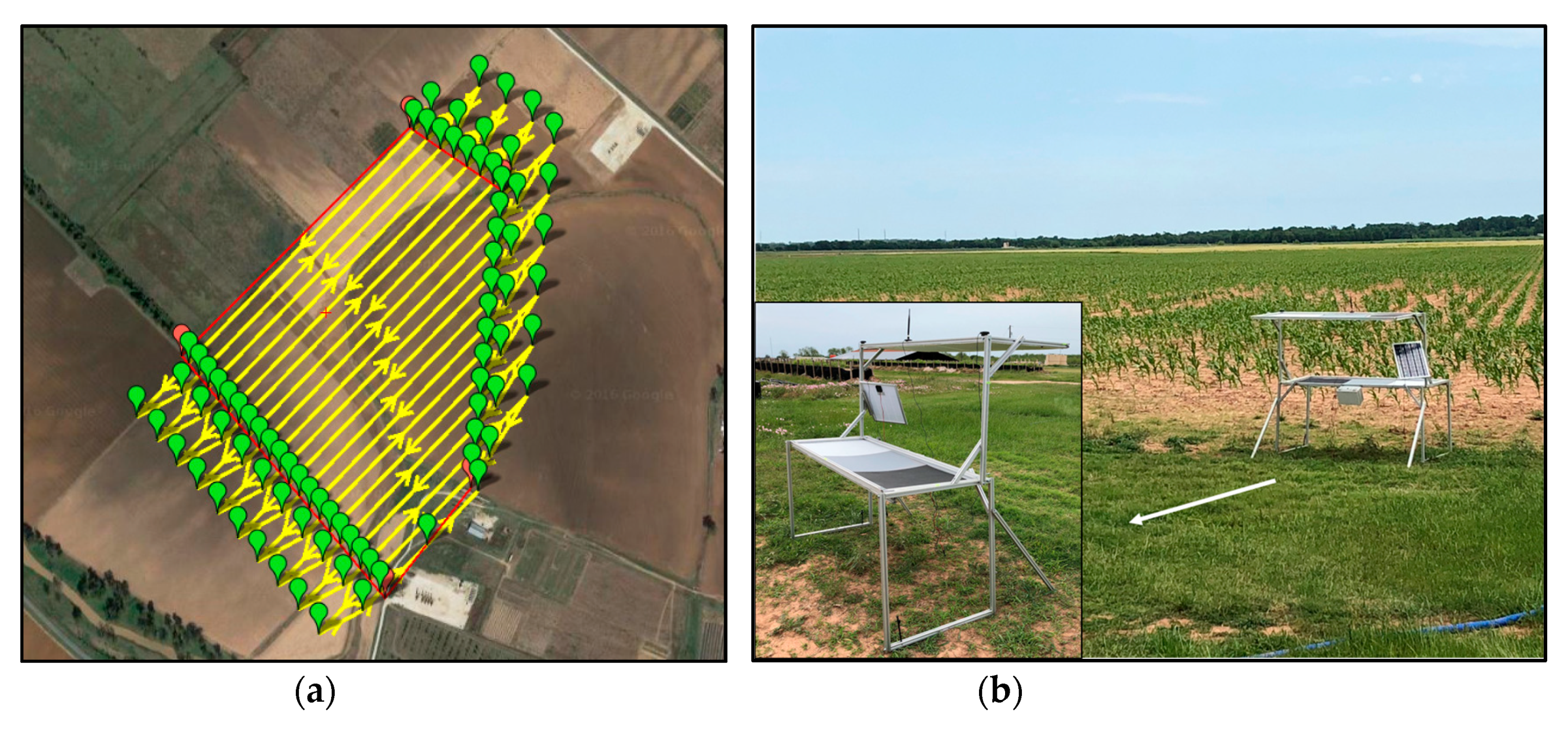
2.4. Field Testing
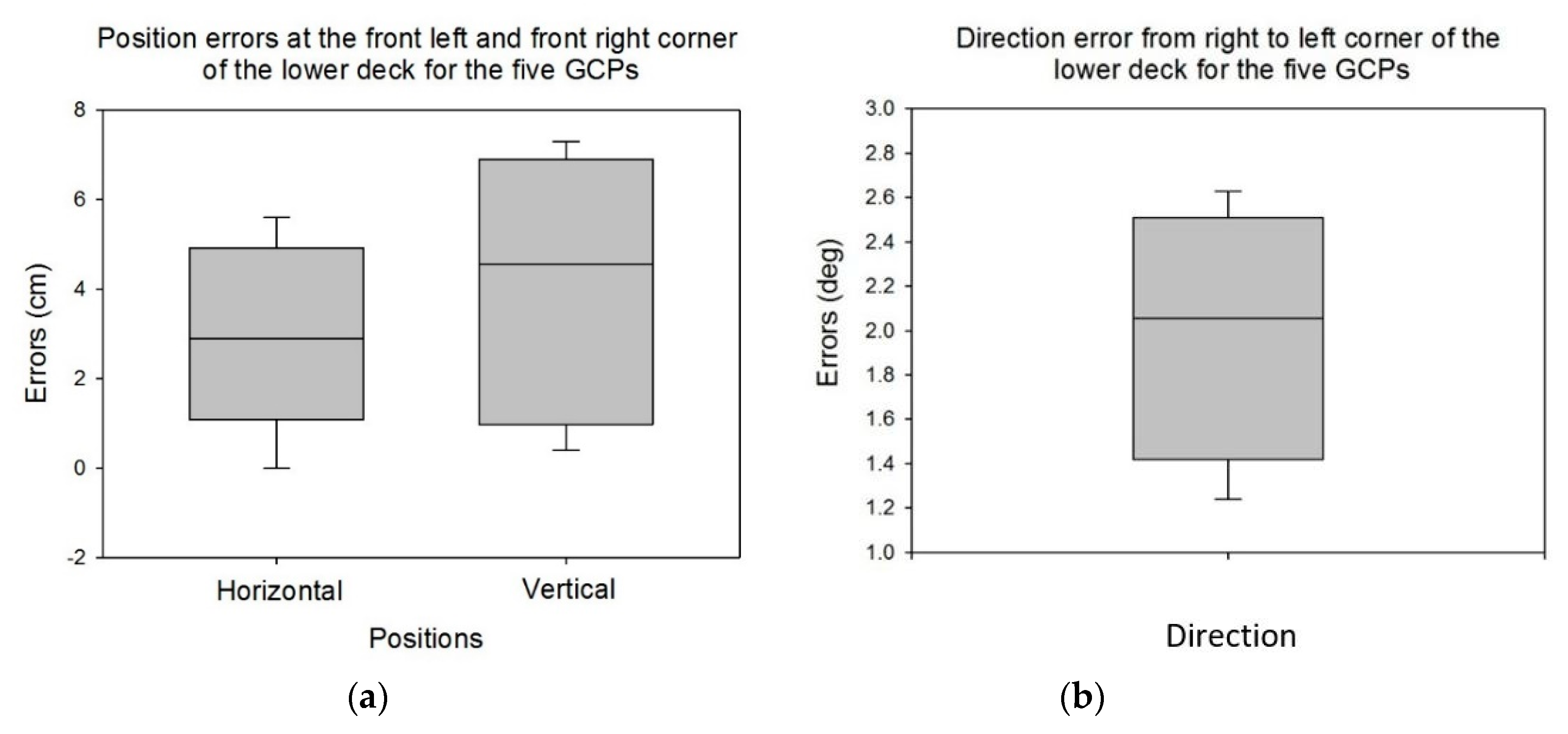
2.4.1. Accuracy Assessment
2.4.2. Validation Experiment
3. Results and Discussion
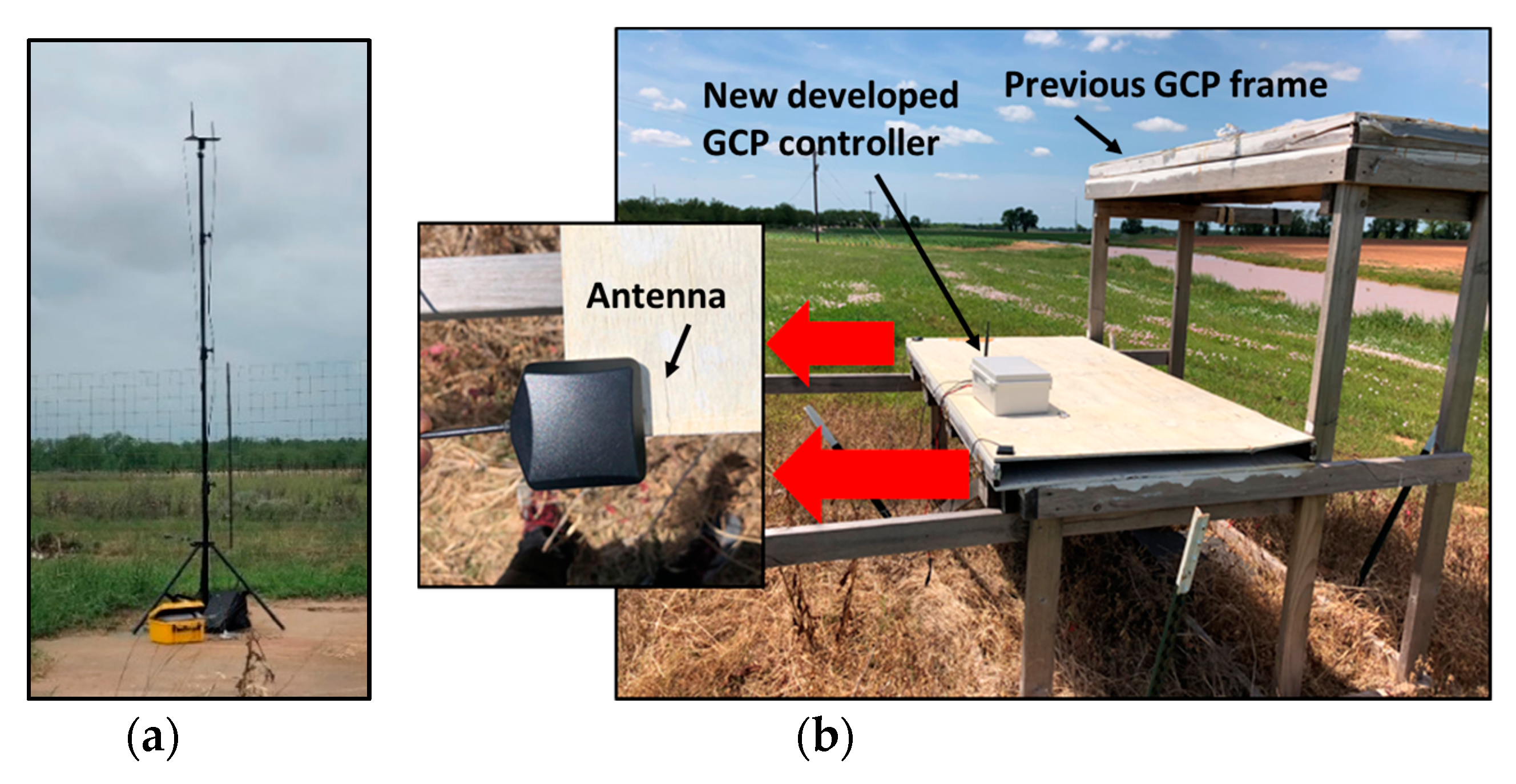
3.1. GCP Physical System and Position Accuracy
3.2. Performance of the Wireless Network
3.3. Field Validation Test
3.4. Advantages and Limitations
4. Conclusions
Author Contributions
Funding
Acknowledgments
Conflicts of Interest
References
- Swain, K.C.; Thomson, S.J.; Jayasuriya, H.P. Adoption of an unmanned helicopter for low-altitude remote sensing to estimate yield and total biomass of a rice crop. Trans. ASABE 2010, 53, 21–27. [Google Scholar] [CrossRef]
- Gonzalez-Dugo, V.; Zarco-Tejada, P.; Nicolás, E.; Nortes, P.A.; Alarcón, J.J.; Intrigliolo, D.S.; Fereres, E.J. Using high resolution UAV thermal imagery to assess the variability in the water status of five fruit tree species within a commercial orchard. Precis. Agric. 2013, 14, 660–678. [Google Scholar] [CrossRef]
- Bendig, J.; Bolten, A.; Bennertz, S.; Broscheit, J.; Eichfuss, S.; Bareth, G. Estimating biomass of barley using crop surface models (CSMs) derived from UAV-based RGB imaging. Remote Sens. 2014, 6, 10395–10412. [Google Scholar] [CrossRef]
- Xiang, H.; Tian, L. Method for automatic georeferencing aerial remote sensing (RS) images from an unmanned aerial vehicle (UAV) platform. Biosyst. Eng. 2011, 108, 104–113. [Google Scholar] [CrossRef]
- Gómez-Candón, D.; De Castro, A.I.; López-Granados, F. Assessing the accuracy of mosaics from unmanned aerial vehicle (UAV) imagery for precision agriculture purposes in wheat. Precis. Agric. 2014, 15, 44–56. [Google Scholar] [CrossRef]
- Wang, J.; Ge, Y.; Heuvelink, G.B.; Zhou, C.; Brus, D. Effect of the sampling design of ground control points on the geometric correction of remotely sensed imagery. Int. J. Appl. Earth Obs. 2012, 18, 91–100. [Google Scholar] [CrossRef]
- Hugenholtz, C.H.; Whitehead, K.; Brown, O.W.; Barchyn, T.E.; Moorman, B.J.; LeClair, A.; Riddell, K.; Hamilton, T. Geomorphological mapping with a small unmanned aircraft system (sUAS): Feature detection and accuracy assessment of a photogrammetrically-derived digital terrain model. Geomorphology 2013, 194, 16–24. [Google Scholar] [CrossRef] [Green Version]
- Patias, P.; Giagkas, F.; Georgiadis, C.; Mallinis, G.; Kaimaris, D.; Tsioukas, V. Evaluating horizontal positional accuracy of low-cost UAV orthomosaics over forest terrain using ground control points extracted from different sources. In Proceedings of the International Conference on Remote Sensing and Geoinformation of the Environment, International Society for Optics and Photonics, Paphos, Cyprus, 20–23 March 2017; p. 104440U. [Google Scholar]
- Turner, D.; Lucieer, A.; Wallace, L. Direct georeferencing of ultrahigh-resolution UAV imagery. IEEE Trans. Geosci. Remote Sens. 2014, 52, 2738–2745. [Google Scholar] [CrossRef]
- Wells, R.R.; Momm, H.G.; Castillo, C. Quantifying uncertainty in high-resolution remotely sensed topographic surveys for ephemeral gully channel monitoring. Earth Surf. Dyn. 2017, 5, 347. [Google Scholar] [CrossRef]
- Propeller. Available online: https://www.propelleraero.com/aeropoints/ (accessed on 10 August 2018).
- Johansen, K.; Raharjo, T. Multi-temporal assessment of lychee tree crop structure using multi-spectral RPAS imagery. Int. Arch. Photogramm. Remote Sens. Spat. Inf. Sci. 2017, 42, 165. [Google Scholar] [CrossRef]
- Johansen, K.; Raharjo, T.; McCabe, M. Using multi-spectral UAV imagery to extract tree crop structural properties and assess pruning effects. Remote Sens. 2018, 10, 854. [Google Scholar] [CrossRef]
- Chiang, K.W.; Tsai, M.L.; Chu, C.H. The development of an UAV borne direct georeferenced photogrammetric platform for ground control point free applications. Sensors 2012, 12, 9161–9180. [Google Scholar] [CrossRef] [PubMed]
- Smhh, D.P.; Atkinson, S.F. Accuracy of rectification using topographic map versus GPS ground control points. Photogramm. Eng. Remote Sens. 2001, 67, 565–570. [Google Scholar]
- Cooley, T.; Anderson, G.P.; Felde, G.W.; Hoke, M.L.; Ratkowski, A.J.; Chetwynd, J.H.; Gardner, J.A.; Adler-Golden, S.M.; Matthew, M.W.; Berk, A.; et al. FLAASH, a MODTRAN4-based atmospheric correction algorithm, its application and validation. In Proceedings of the IEEE International Geoscience and Remote Sensing Symposium, Toronto, ON, Canada, 24–28 June 2002; pp. 1414–1418. [Google Scholar]
- Iqbal, F.; Lucieer, A.; Barry, K. Simplified radiometric calibration for UAS-mounted multispectral sensor. Eur. J. Remote Sens. 2018, 51, 301–313. [Google Scholar] [CrossRef]
- Han, X.; Thomasson, J.A.; Bagnall, G.C.; Pugh, N.A.; Horne, D.W.; Rooney, W.L.; Jung, J.; Chang, A.; Malambo, L.; Popescu, S.C.; Gates, I.T.; Cope, D.A. Measurement and calibration of plant-height from fixed-wing UAV images. Sensors 2018, 18, 4092. [Google Scholar] [CrossRef] [PubMed]
- Satirapod, C.; Homniam, P. GPS precise point positioning software for ground control point establishment in remote sensing applications. J. Surv. Eng. 2006, 132, 11–14. [Google Scholar] [CrossRef]
- Forlani, G.; Dall’Asta, E.; Diotri, F.; Cella, U.M.D.; Roncella, R.; Santise, M. Quality assessment of DSMs produced from UAV flights georeferenced with on-board RTK positioning. Remote Sens. 2018, 10, 311. [Google Scholar] [CrossRef]
- Agüera-Vega, F.; Carvajal-Ramírez, F.; Martínez-Carricondo, P. Assessment of photogrammetric mapping accuracy based on variation ground control points number using unmanned aerial vehicle. Measurement 2017, 98, 221–227. [Google Scholar]
- Oniga, V.E.; Breaban, A.I.; Statescu, F. Determining the optimum number of ground control points for obtaining high precision results based on UAS images. Proceedings 2018, 2, 352. [Google Scholar] [CrossRef]
- Thomasson, J.A.; Shi, Y.; Sima, C.; Yang, C.; Cope, D.A. Automated geographic registration and radiometric correction for UAV-based mosaics. In Proceedings of the Autonomous Air and Ground Sensing Systems for Agricultural Optimization and Phenotyping, International Society for Optics and Photonics, San Diego, CA, USA, 6–10 August 2017; p. 102180K. [Google Scholar]
- Anisi, M.H.; Abdul-Salaam, G.; Abdullah, A.H. A survey of wireless sensor network approaches and their energy consumption for monitoring farm fields in precision agriculture. Precis. Agric. 2015, 16, 216–238. [Google Scholar] [CrossRef]
- Capraro, F.; Tosetti, S.; Rossomando, F.; Mut, V.; Vita Serman, F. Web-based system for the remote monitoring and management of precision irrigation: a case study in an arid region of Argentina. Sensors 2018, 18, 3847. [Google Scholar] [CrossRef] [PubMed]
- Liu, B. Wireless Sensor Network Applications in Precision Agriculture. J. Agric. Syst. Technol. Manag. 2018, 29, 25–37. [Google Scholar]
- Gong, S.; Zhang, C.; Ma, L.; Fang, J.; Wang, S. Design and implementation of a low-power ZigBee wireless temperature humidity sensor network. In Proceedings of the International Conference on Computer and Computing Technologies in Agriculture, Nanchang, China, 22–25 October 2010; pp. 616–622. [Google Scholar]
- Matijevics, I. Wireless sensors networks–theory and practice. In Towards Intelligent Engineering and Information Technology; Springer: Berlin/Heidelberg, Germany, 2009; pp. 405–417. [Google Scholar]
- Hwang, J.; Shin, C.; Yoe, H. Study on an agricultural environment monitoring server system using wireless sensor networks. Sensors 2010, 10, 11189–11211. [Google Scholar] [CrossRef] [PubMed]
- Chaudhary, D.D.; Nayse, S.P.; Waghmare, L.M. Application of wireless sensor networks for greenhouse parameter control in precision agriculture. Int. J. Wirel. Mob. Netw. 2011, 3, 140–149. [Google Scholar] [CrossRef]
- Zhu, Y.; Song, J.; Dong, F. Applications of wireless sensor network in the agriculture environment monitoring. Procedia Eng. 2011, 16, 608–614. [Google Scholar] [CrossRef] [Green Version]
- Gao, R.; Zhou, H.; Su, G. A wireless sensor network environment monitoring system based on TinyOS. In Proceedings of the International Conference on Electronics and Optoelectronics, Dalian, Liaoning, China, 29–31 July 2011; p. V1-497. [Google Scholar]
- Li, L.L.; Yang, S.F.; Wang, L.Y.; Gao, X.M. The greenhouse environment monitoring system based on wireless sensor network technology. In Proceedings of the IEEE International Conference on Cyber Technology in Automation, Control, and Intelligent Systems, Kunming, China, 20–23 March 2011; pp. 265–268. [Google Scholar]
- Online Positioning User Service. Available online: https://www.ngs.noaa.gov/OPUS/ (accessed on 27 April 2018).
- Kim, D.W.; Yun, H.; Jeong, S.J.; Kwon, Y.S.; Kim, S.G.; Lee, W.; Kim, H.J. Modeling and testing of growth status for Chinese cabbage and white radish with UAV-based RGB imagery. Remote Sens. 2018, 10, 563. [Google Scholar] [CrossRef]
- Ouédraogo, M.M.; Degré, A.; Debouche, C.; Lisein, J. The evaluation of unmanned aerial system-based photogrammetry and terrestrial laser scanning to generate DEMs of agricultural watersheds. Geomorphology 2014, 214, 339–355. [Google Scholar] [CrossRef]
- Yun, H.S.; Park, S.H.; Kim, H.J.; Lee, W.D.; Do Lee, K.; Hong, S.Y.; Jung, G.H. Use of unmanned aerial vehicle for multi-temporal monitoring of soybean vegetation fraction. J. Biosyst. Eng. 2016, 41, 126–137. [Google Scholar] [CrossRef]
- Del Pozo, S.; Rodríguez-Gonzálvez, P.; Hernández-López, D.; Felipe-García, B. Vicarious radiometric calibration of a multispectral camera on board an unmanned aerial system. Remote Sens. 2014, 6, 1918–1937. [Google Scholar] [CrossRef]
- Bendig, J.; Bolten, A.; Bareth, G. UAV-based imaging for multi-temporal, very high resolution crop surface models to monitor crop growth variability. J. Photogramm. Remote Sens. Geoinf. Process. 2013, 6, 551–562. [Google Scholar]
- Ruiz, J.; Diaz-Mas, L.; Perez, F.; Viguria, A. Evaluating the accuracy of DEM generation algorithms from UAV imagery. Int. Arch. Photogramm. Remote Sens. Spat. Inf. Sci. 2013, 40, 333–337. [Google Scholar] [CrossRef]







{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Start Marker | Device ID | Instruction ID | End Marker | CRC16 Check |
|---|---|---|---|---|
| 2 bytes | 1 byte | 1 byte | 1 byte | 2 bytes |
| Start Marker | Device ID | Length | Long Left | Lat Left | Long Right | Lat Right | Alt Left | Alt Right | CRC 16 |
|---|---|---|---|---|---|---|---|---|---|
| 2 bytes | 1 byte | 1 byte | 4 bytes | 4 bytes | 4 bytes | 4 bytes | 2 bytes | 2 bytes | 2 bytes |
| RMSE | STDV | AVG | |
|---|---|---|---|
| Horizontal position | 3.3 cm | 2.1 cm | 2.3 cm |
| Vertical position | 4.6 cm | 2.8 cm | 4.2 deg |
| Direction | 1.9 deg | 0.5 deg | 1.9 deg |
| GCP No. | Latitude_L (deg) | Longitude_L (deg) | Latitude_R (deg) | Longitude_R (deg) | Elevation (m) | Direction (deg) |
|---|---|---|---|---|---|---|
| 1 | 30.530725 | −96.427479 | 30.530734 | −96.427497 | 39.95 | 121.39 |
| 2 | 30.529293 | −96.428584 | 30.529280 | −96.428597 | 39.30 | 40.10 |
| 3 | 30.532036 | −96.428840 | 30.532049 | −96.428853 | 38.55 | 138.40 |
| 4 | 30.533206 | −96.430037 | 30.533219 | −96.430051 | 39.27 | 136.48 |
| 5 | 30.533251 | −96.432460 | 30.533264 | −96.432446 | 38.93 | 222.65 |
| 6 | 30.535868 | −96.429613 | 30.535881 | −96.429599 | 39.60 | 221.58 |
| 7 | 30.536026 | −96.427197 | 30.536014 | −96.427183 | 38.45 | 316.52 |
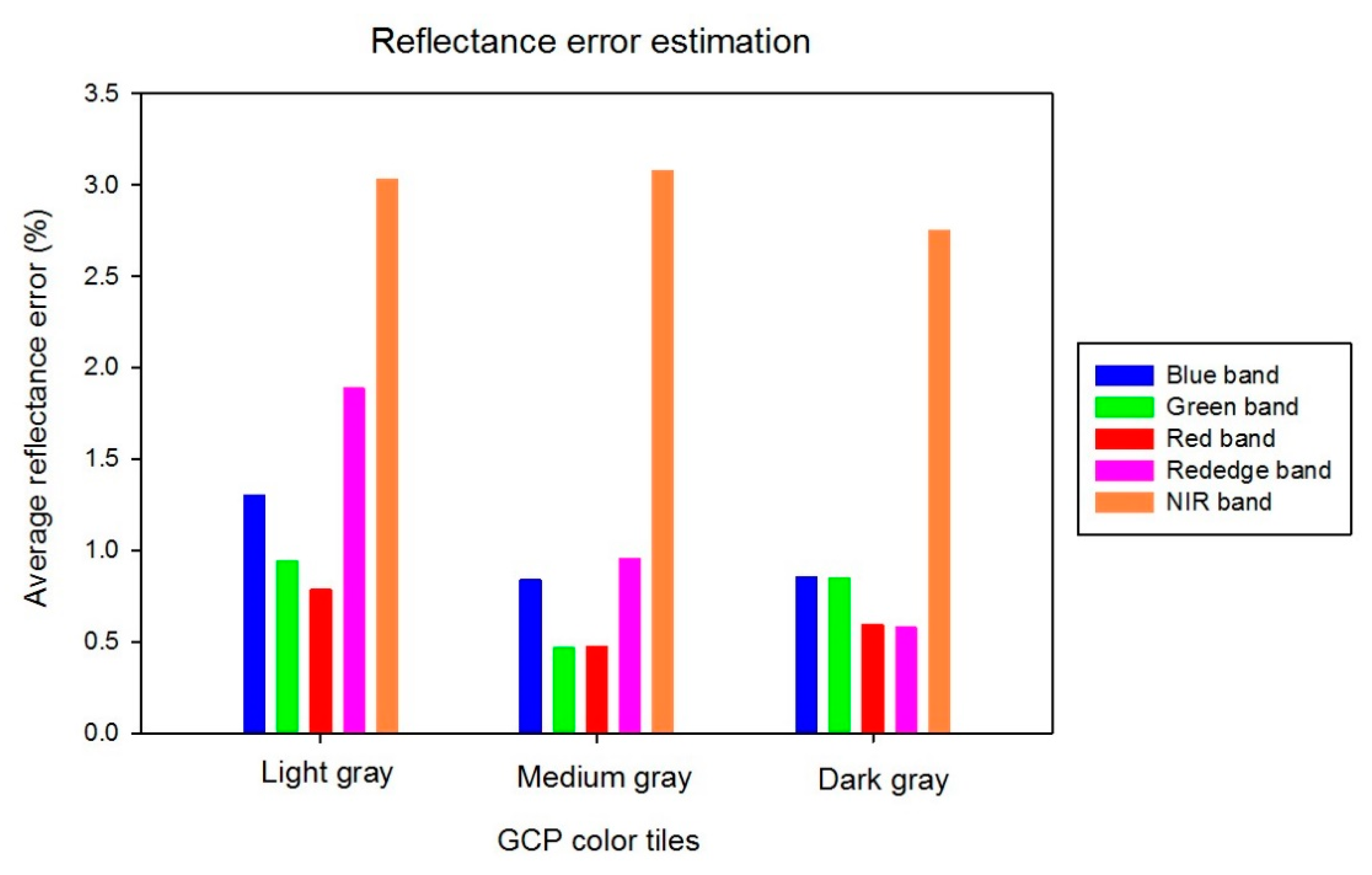
| Band | K (Slope) | C (Intercept) | R2 |
|---|---|---|---|
| 475 nm | 0.001334 | −3.423 | 0.9906 |
| 560 nm | 0.001192 | −4.849 | 0.9924 |
| 668 nm | 0.001434 | −4.790 | 0.9943 |
| 717 nm | 0.001082 | −14.18 | 0.9849 |
| 840 nm | 0.002539 | −20.72 | 0.9622 |
| Color Tile | GCP Layer | Height Error |
|---|---|---|
| Light gray | Upper | 8.04 cm |
| Lower | 9.08 cm | |
| Medium gray | Upper | 8.47 cm |
| Lower | 9.67 cm | |
| Dark gray | Upper | 7. 95 cm |
| Lower | 9.86 cm |
© 2019 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Han, X.; Thomasson, J.A.; Xiang, Y.; Gharakhani, H.; Yadav, P.K.; Rooney, W.L. Multifunctional Ground Control Points with a Wireless Network for Communication with a UAV. Sensors 2019, 19, 2852. https://doi.org/10.3390/s19132852
Han X, Thomasson JA, Xiang Y, Gharakhani H, Yadav PK, Rooney WL. Multifunctional Ground Control Points with a Wireless Network for Communication with a UAV. Sensors. 2019; 19(13):2852. https://doi.org/10.3390/s19132852
Chicago/Turabian StyleHan, Xiongzhe, J. Alex Thomasson, Yang Xiang, Hussein Gharakhani, Pappu K. Yadav, and William L. Rooney. 2019. "Multifunctional Ground Control Points with a Wireless Network for Communication with a UAV" Sensors 19, no. 13: 2852. https://doi.org/10.3390/s19132852
APA StyleHan, X., Thomasson, J. A., Xiang, Y., Gharakhani, H., Yadav, P. K., & Rooney, W. L. (2019). Multifunctional Ground Control Points with a Wireless Network for Communication with a UAV. Sensors, 19(13), 2852. https://doi.org/10.3390/s19132852