Identification and Compensation Technique of Non-Uniform Temperature Field for Lamb Wave-and Multiple Sensors-Based Damage Detection


Abstract
:1. Introduction
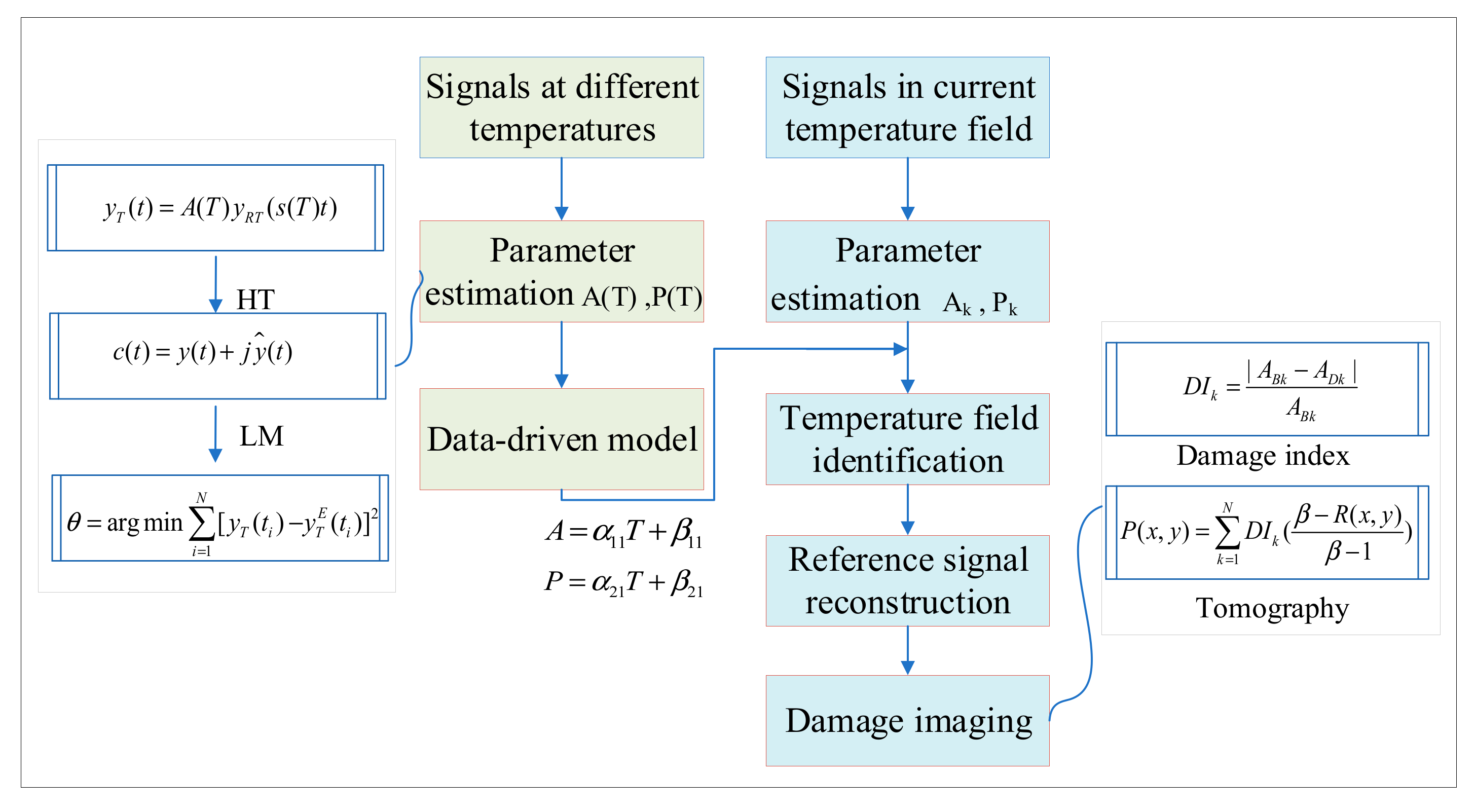
2. Temperature Compensation Principle
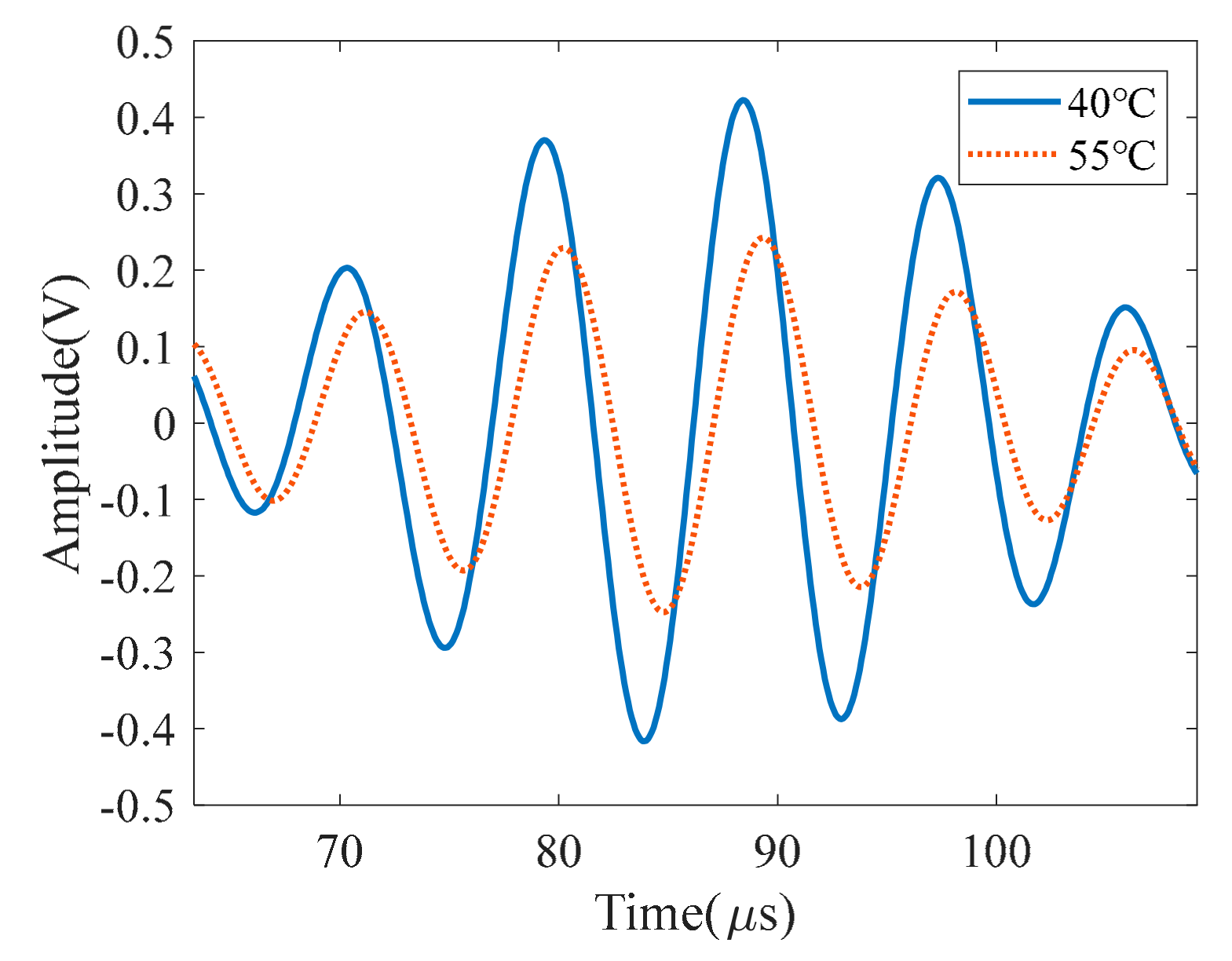
2.1. Parameter Estimation and Signal Reconstruction for Compensation
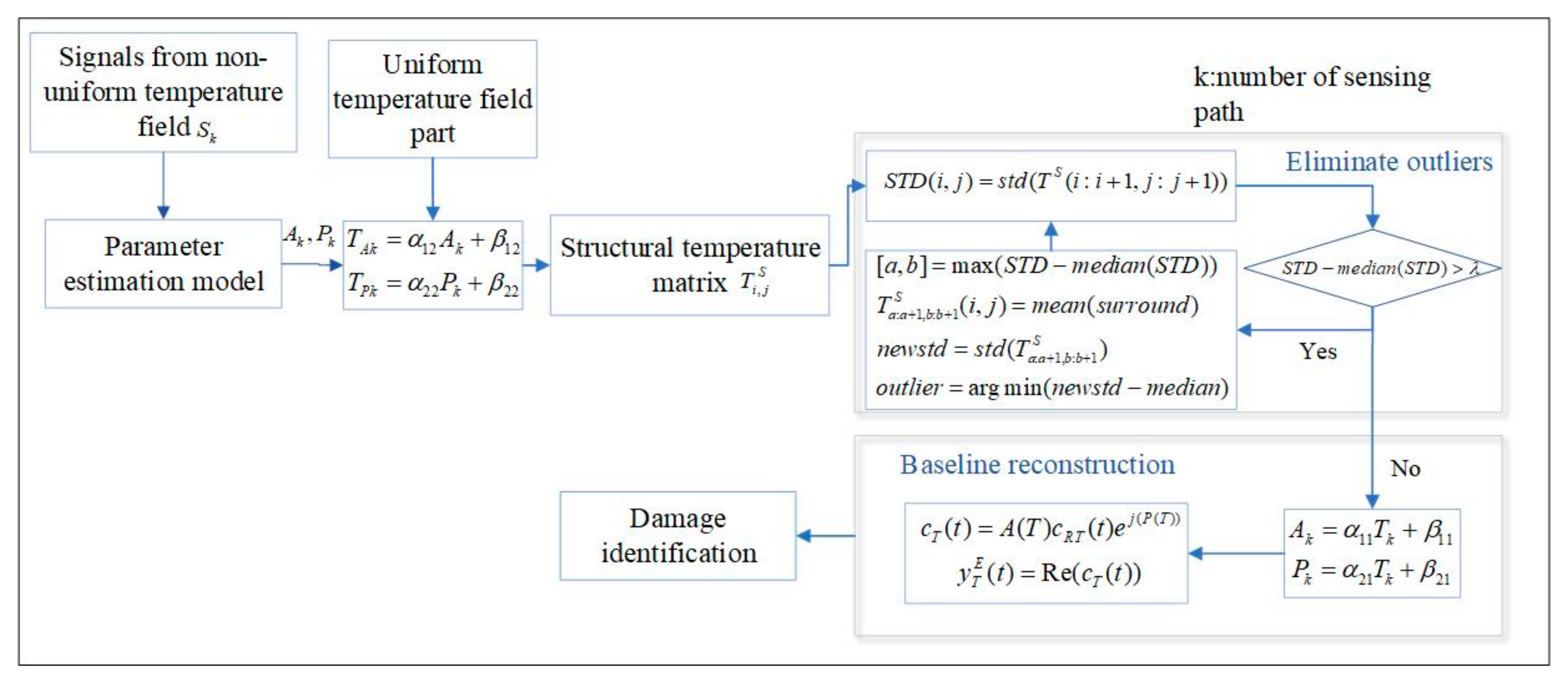
2.2. Identification and Compensation of Non-Uniform Temperature Field
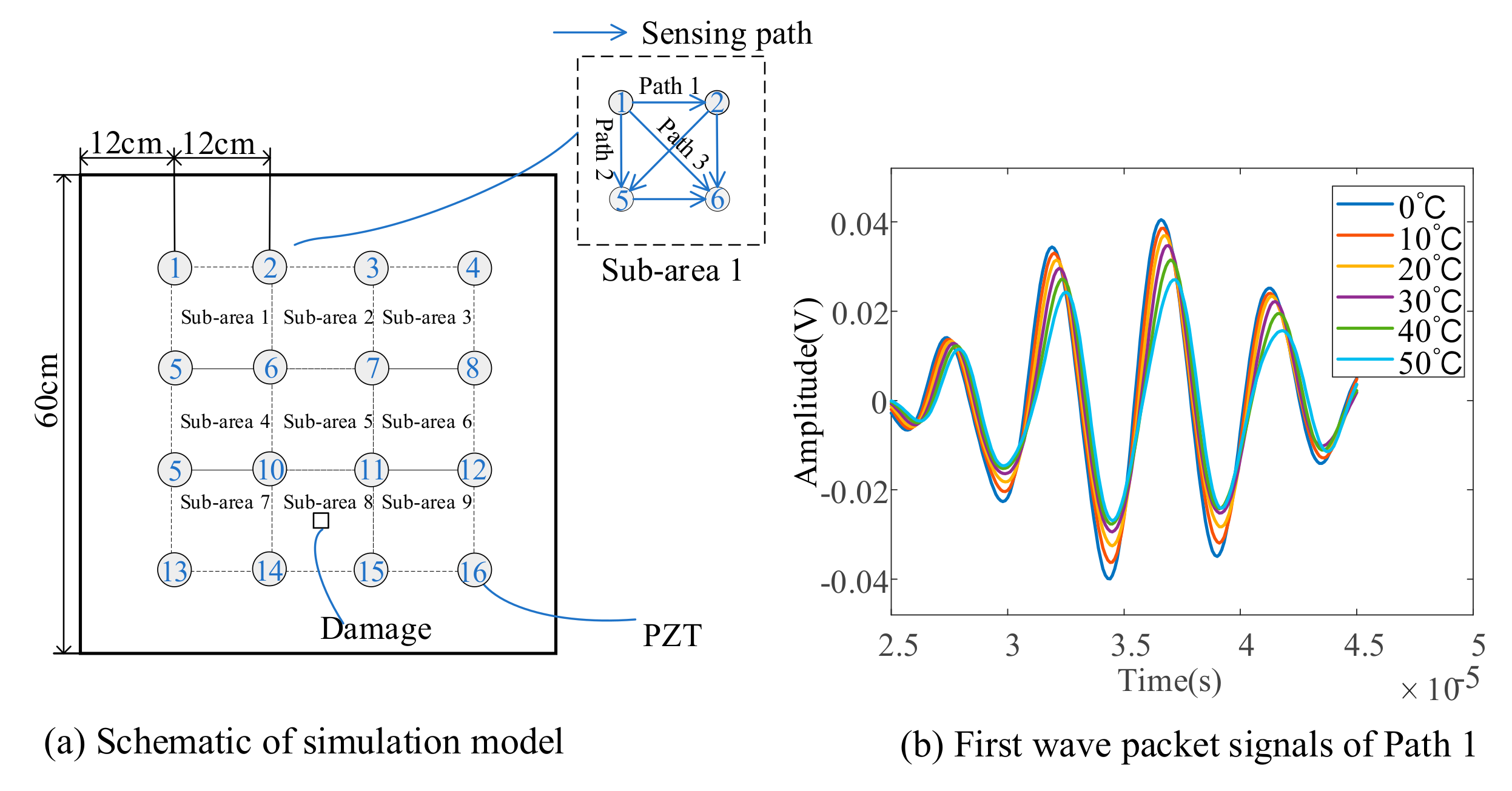
3. Simulation Verification
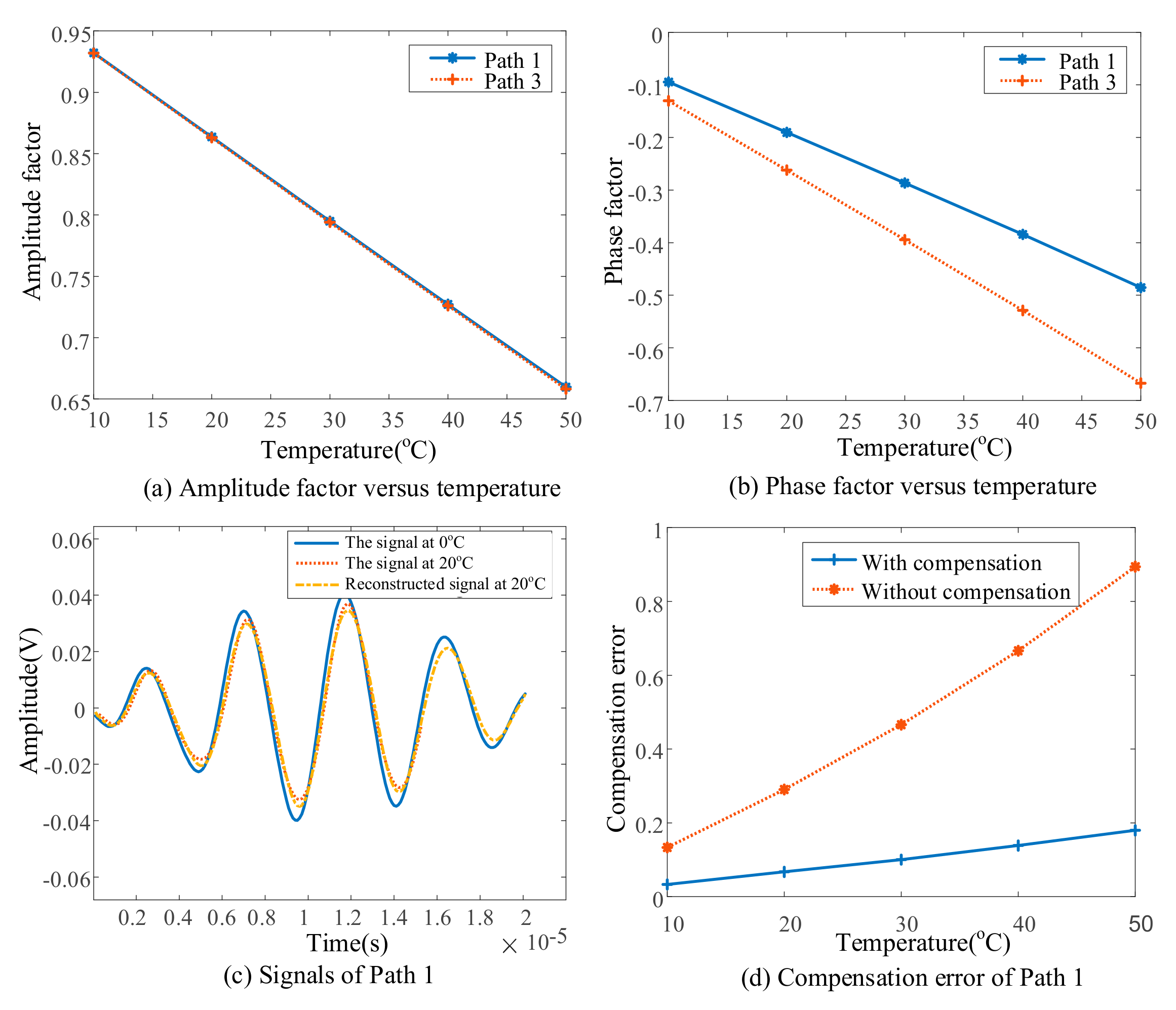
3.1. Parameter Estimation and Signal Reconstruction
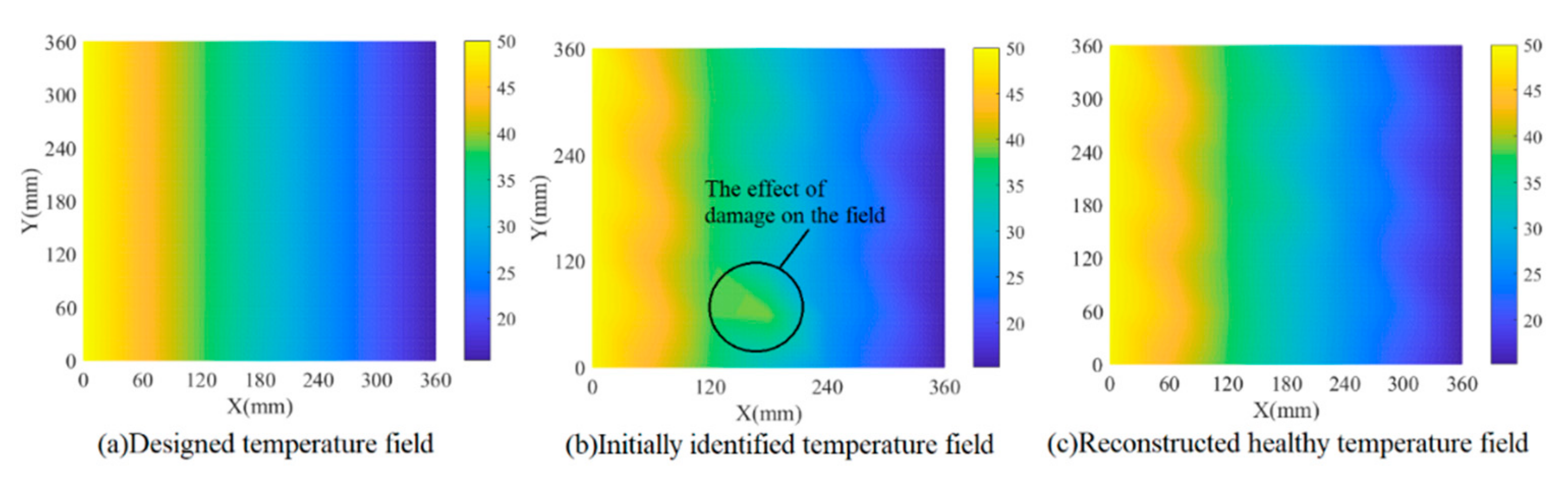
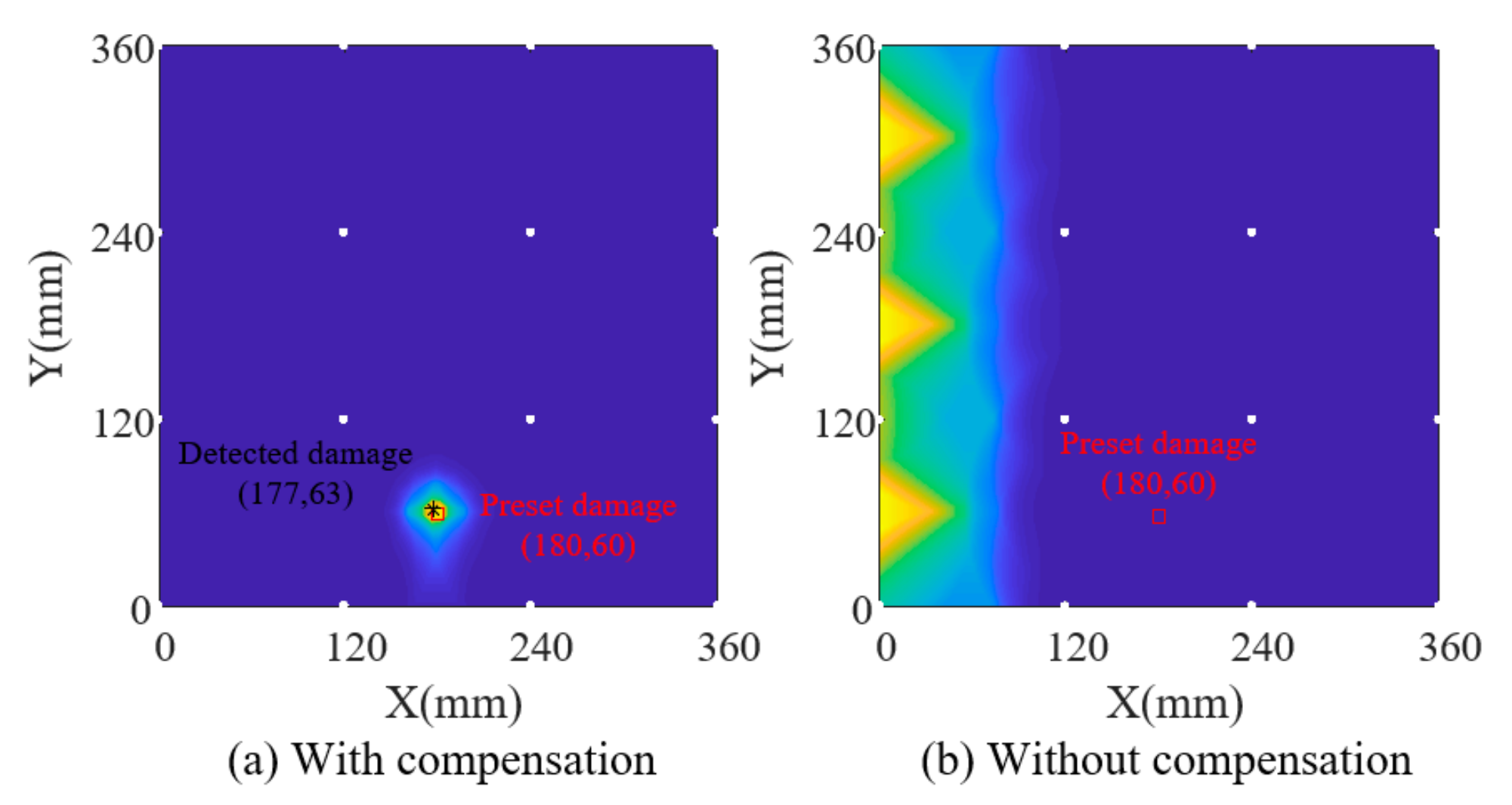
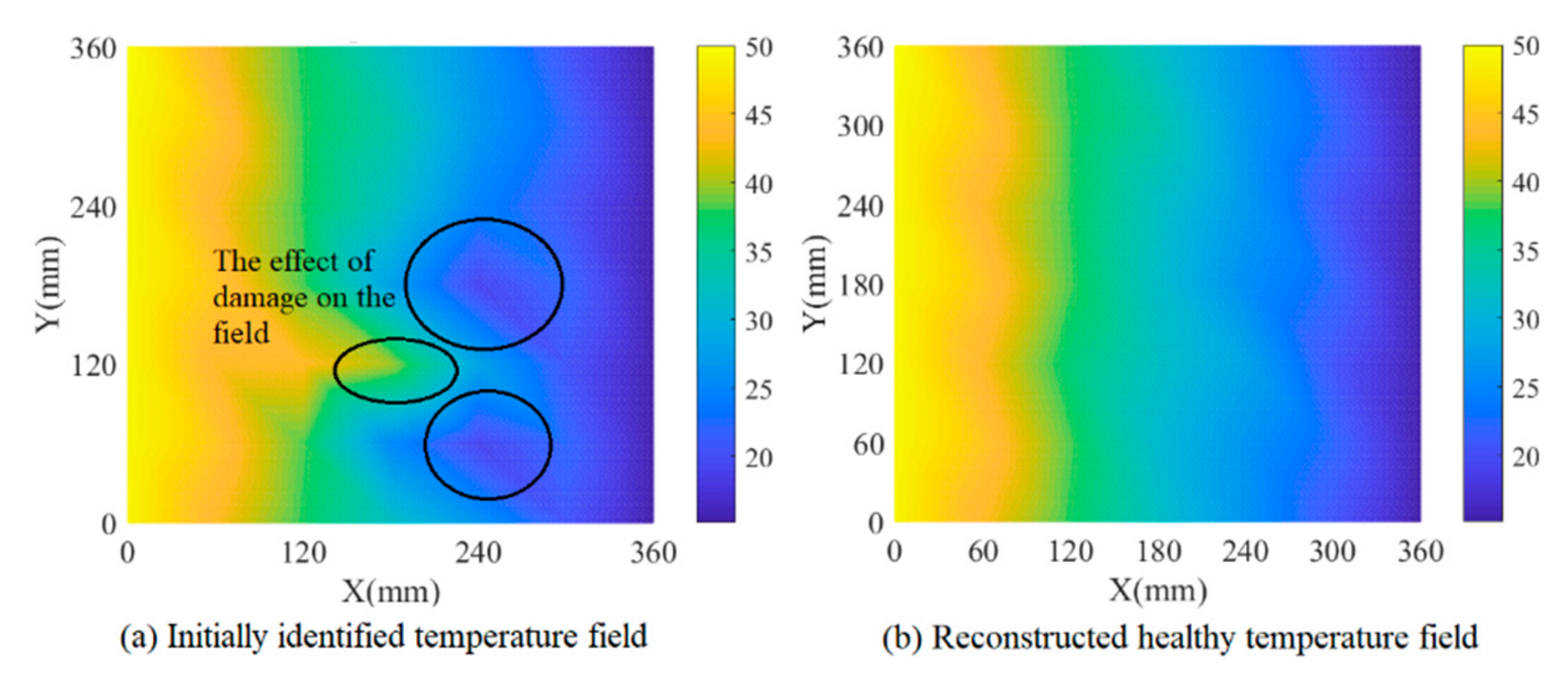
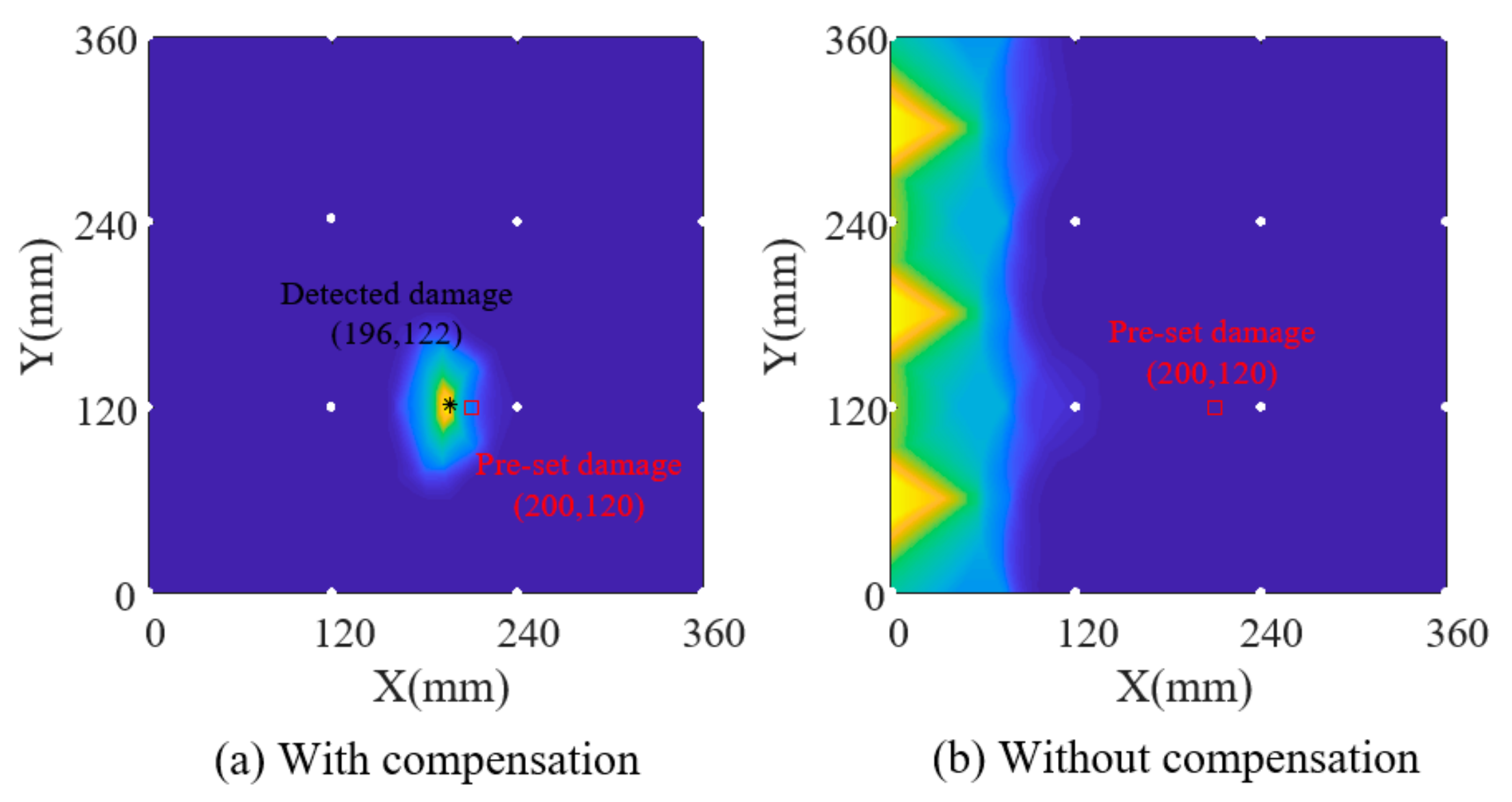
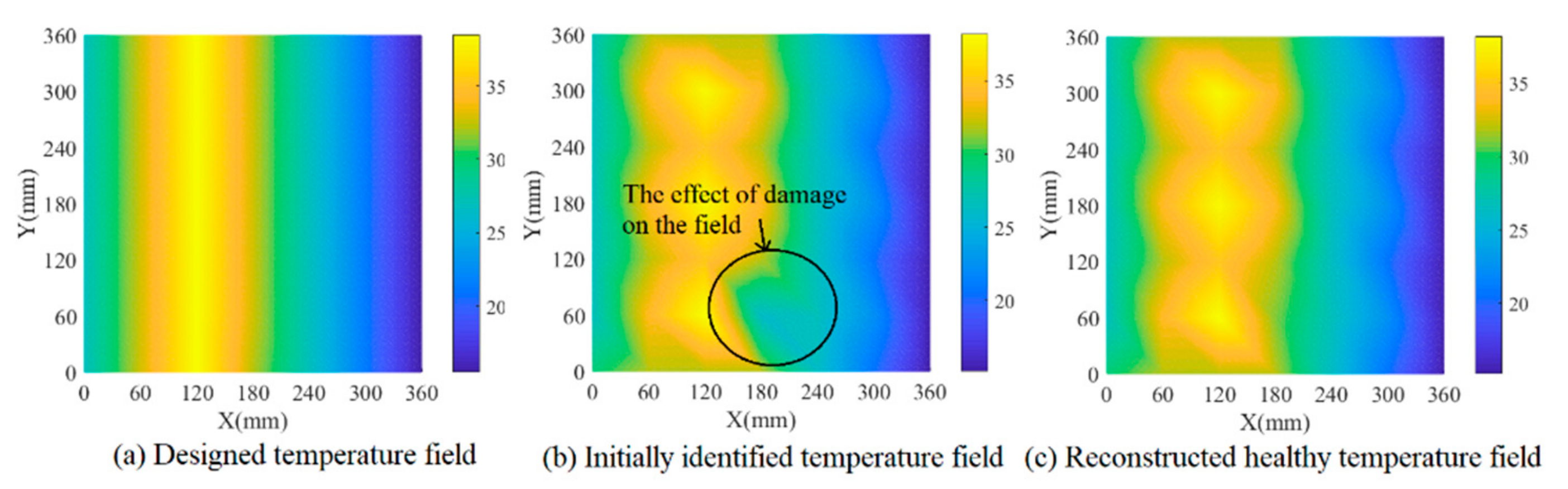
3.2. Identification of Non-Uniform Temperature Field and Damage Imaging
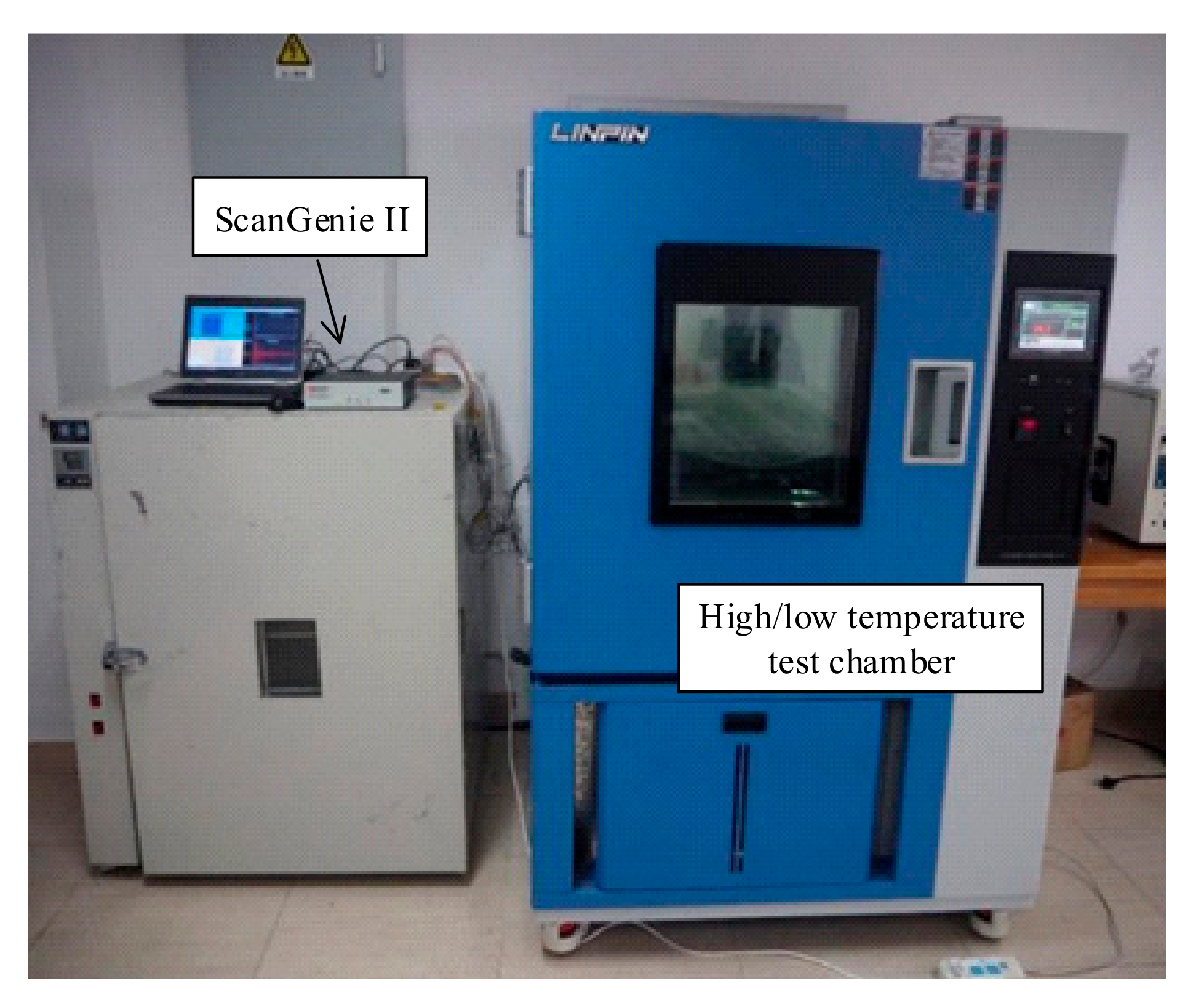
4. Experiment Verification
5. Conclusions
Author Contributions
Funding
Conflicts of Interest
References
- Qing, X.; Li, W.; Wang, Y.; Wang, Y.; Sun, H. Piezoelectric transducer-based structural health monitoring for aircraft applications. Sensors 2019, 19, 545. [Google Scholar] [CrossRef] [PubMed]
- Shan, S.; Qiu, J.; Zhang, C.; Ji, H.; Cheng, L. Multi-damage localization on large complex structures through an extended delay-and-sum based method. Struct. Health Monit. 2016, 15, 50–64. [Google Scholar] [CrossRef]
- Kudela, P.; Radzienski, M.; Ostachowicz, W.; Yang, Z. Structural health monitoring system based on a concept of Lamb wave focusing by the piezoelectric array. Mech. Syst. Signal Process. 2018, 108, 21–32. [Google Scholar] [CrossRef]
- Bao, Q.; Yuan, S.; Guo, F.; Qiu, L. Transmitter beamforming and weighted image fusion–based multiple signal classification algorithm for corrosion monitoring. Struct. Health Monit. 2019, 18, 621–634. [Google Scholar] [CrossRef]
- Tian, Z.; Howden, S.; Ma, Z.; Xiao, W.; Yu, L. Pulsed laser-scanning laser Doppler vibrometer (PL-SLDV) phased arrays for damage detection in aluminum plates. Mech. Syst. Signal Process. 2019, 121, 158–170. [Google Scholar] [CrossRef]
- Hay, T.R.; Royer, R.L.; Gao, H.; Zhao, X.; Rose, J.L. A comparison of embedded sensor Lamb wave ultrasonic tomography approaches for material loss detection. Smart Mater. Struct. 2006, 15, 946–951. [Google Scholar] [CrossRef]
- Zhou, L.; Sun, H.; He, Z. Fractal dimension-based damage imaging for composites. Shock Vib. 2013, 20, 979–988. [Google Scholar] [CrossRef]
- Ratassepp, M.; Rao, J.; Fan, Z. Quantitative imaging of Young’s modulus in plates using guided wave tomography. NDT E Int. 2018, 94, 22–30. [Google Scholar] [CrossRef]
- Li, W.; Xu, Y.; Qing, X.; Yang, Z. Quantitative imaging of surface cracks in polymer bonded explosives by surface wave tomographic approach. Polym. Test. 2019, 74, 63–71. [Google Scholar] [CrossRef]
- Li, D.; Shi, M.; Xu, F.; Liu, C.; Zhang, J.; Ta, D. A new approach to guided wave ray tomography for temperature-robust damage detection using piezoelectric sensors. Sensors 2018, 18, 3518. [Google Scholar] [CrossRef]
- Kim, D.K.; Lee, J.K.; Seung, H.M.; Park, C.I.; Kim, Y.Y. Omnidirectional shear horizontal wave based tomography for damage detection in a metallic plate with the compensation for the transfer functions of transducer. Ultrasonics 2018, 88, 72–83. [Google Scholar] [CrossRef] [PubMed]
- He, J.; Yuan, F.-G. Lamb-wave-based two-dimensional areal scan damage imaging using reverse-time migration with a normalized zero-lag cross-correlation imaging condition. Struct. Health Monit. 2016, 16, 444–457. [Google Scholar] [CrossRef]
- Wang, L.; Yuan, F.G. Damage Identification in a Composite Plate using Prestack Reverse-time Migration Technique. Struct. Health Monit. 2005, 4, 195–211. [Google Scholar] [CrossRef]
- Mitra, M.; Gopalakrishnan, S. Guided wave based structural health monitoring: A review. Smart Mater. Struct. 2016, 25, 053001. [Google Scholar] [CrossRef]
- Su, Z.; Ye, L.; Lu, Y. Guided Lamb waves for identification of damage in composite structures: A review. J. Sound Vib. 2006, 295, 753–780. [Google Scholar] [CrossRef]
- Sun, H.; Zhang, A.; Wang, Y.; Qing, X. Baseline-free damage imaging for metal and composite plate-type structures based on similar paths. Int. J. Distrib. Sens. Netw. 2019, 15, 1550147719843054. [Google Scholar] [CrossRef]
- Wang, Q.; Yuan, S. Baseline-free Imaging Method based on New PZT Sensor Arrangements. J. Intell. Mater. Syst. Struct. 2009, 20, 1663–1673. [Google Scholar]
- Liu, Z.; Yu, H.; Fan, J.H.; He, C.; Wu, B. Baseline-free delamination inspection in composite plates by synthesizing non-contact air-coupled Lamb wave scan method and virtual time reversal algorithm. Smart Mater. Struct. 2015, 24, 045014. [Google Scholar] [CrossRef]
- Yeum, C.M.; Sohn, H.; Lim, H.J.; Ihn, J.B. Reference-free delamination detection using Lamb waves. Struct. Control Health Monit. 2014, 21, 675–684. [Google Scholar] [CrossRef]
- Lu, Y.; Michaels, J.E. A methodology for structural health monitoring with diffuse ultrasonic waves in the presence of temperature variations. Ultrasonics 2005, 43, 717–731. [Google Scholar] [CrossRef]
- Konstantinidis, G.; Drinkwater, B.W.; Wilcox, P.D. The temperature stability of guided wave structural health monitoring systems. Smart Mater. Struct. 2006, 15, 967–976. [Google Scholar] [CrossRef]
- Clarke, T.; Simonetti, F.; Cawley, P. Guided wave health monitoring of complex structures by sparse array systems: Influence of temperature changes on performance. J. Sound Vib. 2010, 329, 2306–2322. [Google Scholar] [CrossRef]
- Roy, S.; Lonkar, K.; Janapati, V.; Chang, F.-K. A novel physics-based temperature compensation model for structural health monitoring using ultrasonic guided waves. Struct. Health Monit. An Int. J. 2014, 13, 321–342. [Google Scholar] [CrossRef]
- Wang, Y.; Gao, L.; Yuan, S.; Qiu, L.; Qing, X. An adaptive filter–based temperature compensation technique for structural health monitoring. J. Intell. Mater. Syst. Struct. 2014, 25, 2187–2198. [Google Scholar] [CrossRef]
- Fendzi, C.; Rébillat, M.; Mechbal, N.; Guskov, M.; Coffignal, G. A data-driven temperature compensation approach for Structural Health Monitoring using Lamb waves. Struct. Health Monit. An Int. J. 2016, 15, 525–540. [Google Scholar] [CrossRef] [Green Version]
- Beard, S.; Liu, B.; Qing, X.; Zhang, D. Challenges in implementation of SHM. In Proceedings of the 6th International Workshop on Structural Health Monitoring, Stanford, CA, USA, 4–6 September 2007; pp. 65–84. [Google Scholar]





{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Parameter | The Host Structure | Piezoelectric Sensor | Adhesive | |
|---|---|---|---|---|
| E | d31 | e33 | Ea | |
| Value at 20 °C | 69 GPa | −168 × 10−12 m/V | 15 × 10−9 F/m | |
| Sensitivity | −0.04 GPa/°C | −0.5 m/V °C | 0.14 × 10−9 F/m °C | |
| Simulation Model | Damage Location | Temperature Field |
|---|---|---|
| Model 1 | (240, 60) | Gradient |
| Model 2 | (200, 120) | Gradient |
| Model 3 | (240, 60) | More complex |
© 2019 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Sun, H.; Yi, J.; Xu, Y.; Wang, Y.; Qing, X. Identification and Compensation Technique of Non-Uniform Temperature Field for Lamb Wave-and Multiple Sensors-Based Damage Detection. Sensors 2019, 19, 2930. https://doi.org/10.3390/s19132930
Sun H, Yi J, Xu Y, Wang Y, Qing X. Identification and Compensation Technique of Non-Uniform Temperature Field for Lamb Wave-and Multiple Sensors-Based Damage Detection. Sensors. 2019; 19(13):2930. https://doi.org/10.3390/s19132930
Chicago/Turabian StyleSun, Hu, Junyan Yi, Yu Xu, Yishou Wang, and Xinlin Qing. 2019. "Identification and Compensation Technique of Non-Uniform Temperature Field for Lamb Wave-and Multiple Sensors-Based Damage Detection" Sensors 19, no. 13: 2930. https://doi.org/10.3390/s19132930