Single Inertial Sensor-Based Neural Networks to Estimate COM-COP Inclination Angle During Walking

Abstract
:1. Introduction
2. Materials and Methods
2.1. Subjects, Apparatus, and Gait Experiments
2.2. Calculation of the COM-COP Inclination Angle
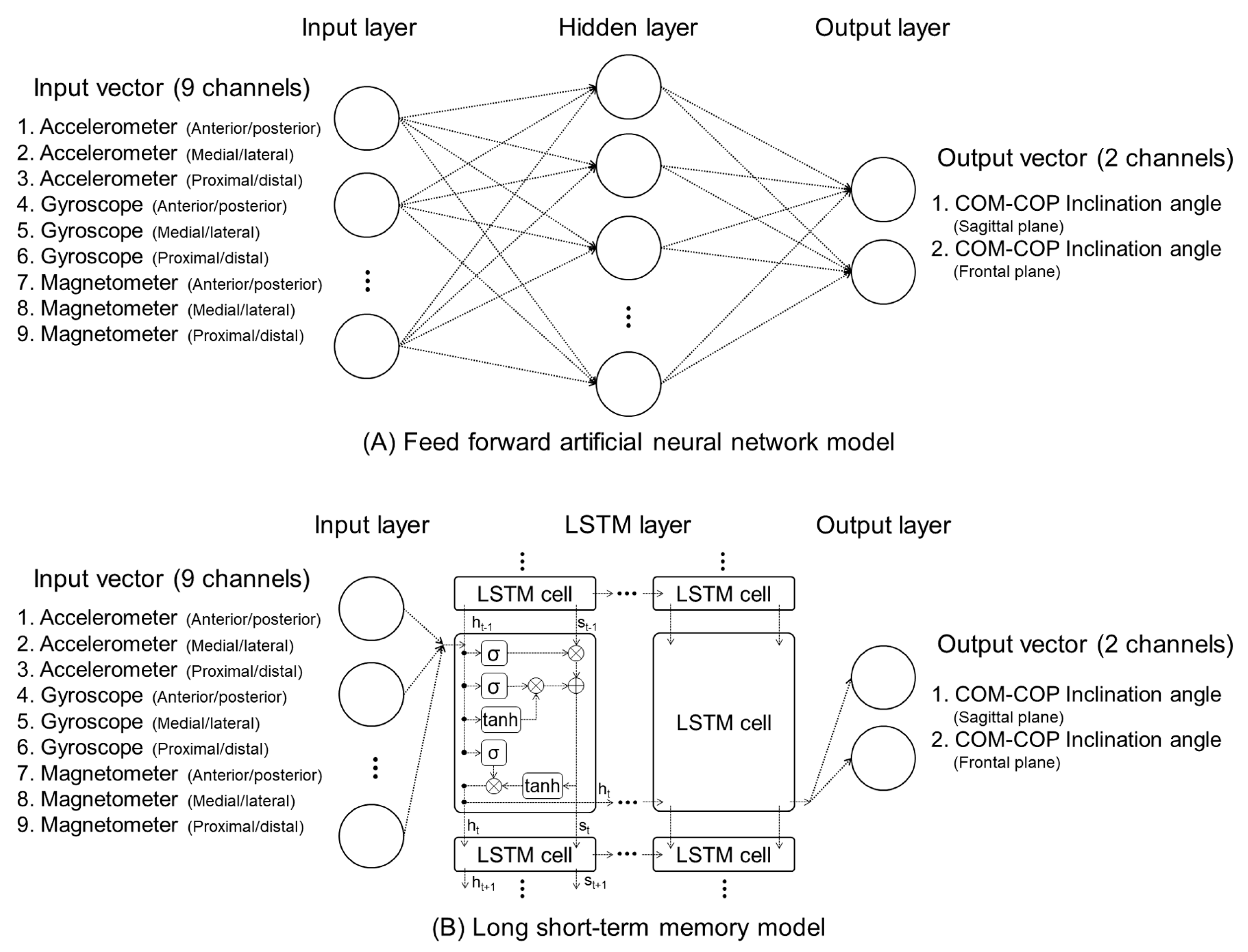
2.3. Artificial Neural Networks
2.4. Statistics
3. Results
4. Discussion
5. Conclusions
Author Contributions
Funding
Conflicts of Interest
References
- Lin, D.; Seol, H.; Nussbaum, M.A.; Madiqan, M.L. Reliability of COP-based postural sway measures and age-related differences. Gait Posture 2008, 28, 337–342. [Google Scholar] [CrossRef] [PubMed]
- Honeycutt, P.D.; Ramsey, P. Factors contributing to falls in elderly men living in the community. Geriatr. Nurs. 2002, 23, 250–255. [Google Scholar] [CrossRef] [PubMed]
- Stevens, J.A. Fatalities and injuries from falls among older adults—United States, 1993–2003 and 2001–2005. Morb. Mortal. Wkly. Rep. 2006, 55, 234–245. [Google Scholar]
- Hahn, M.E.; Chou, L.S. Age-related reduction in sagittal plane center of mass motion during obstacle crossing. J. Biomech. 2004, 37, 837–844. [Google Scholar] [CrossRef] [PubMed]
- Prince, F.; Corriveau, H.; Hebert, R.; Winter, D.A. Gait in the elderly. Gait Posture 1997, 5, 128–135. [Google Scholar] [CrossRef]
- Kaya, B.K.; Krebs, D.E.; Riley, P.O. Dynamic stability in elders: momentum control in locomotor ADL. J. Gerontol. 1998, 53, 126–134. [Google Scholar] [CrossRef] [PubMed]
- Corriveau, H.; Hebert, R.; Prince, F.; Raiche, M. Postural control in the elderly: An analysis of test–retest and interrater reliability of the COP-COM variable. Arch. Phys. Med. Rehabilt. 2001, 82, 80–85. [Google Scholar] [CrossRef] [PubMed]
- Choi, A.; Kang, T.G.; Mun, J.H. Biomechanical evaluation of dynamic balance control ability during golf swing. J. Med. Biol. Eng. 2016, 36, 430–439. [Google Scholar] [CrossRef]
- Lee, H.J.; Chou, L.S. Detection of gait instability using the center of mass and center of pressure inclination angles. Arch. Phys. Med. Rehabilt. 2006, 87, 569–575. [Google Scholar] [CrossRef]
- Hong, S.W.; Leu, T.H.; Wang, T.M.; Li, J.D.; Ho, W.P.; Lu, T.W. Control of body’s center of mass motion relative to center of pressure during uphill walking in the elderly. Gait Posture 2015, 42, 523–528. [Google Scholar] [CrossRef]
- Yang, W.C.; Hsu, W.L.; Wu, R.M.; Lu, T.W.; Lin, K.H. Motion analysis of axial rotation and gait stability during turning in people with Parkinson’s disease. Gait Posture 2016, 44, 83–88. [Google Scholar] [CrossRef] [PubMed]
- Galna, B.; Murphy, A.T.; Morris, M.E. Obstacle crossing in Parkinson’s disease: Mediolateral sway of the centre of mass during level-ground walking and obstacle crossing. Gait Posture 2013, 38, 790–794. [Google Scholar] [CrossRef] [PubMed]
- Paul, J.C.; Patel, A.; Bianco, K.; Godwin, E.; Naziri, Q.; Maier, S.; Lafage, V.; Paulino, C.; Errico, T.J. Gait stability improvement after fusion surgery for adolescent idiopathic scoliosis is influenced by corrective measures in coronal and sagittal planes. Gait Posture 2014, 40, 510–515. [Google Scholar] [CrossRef] [PubMed]
- Feng, J.; Pierce, R.; Do, K.P.; Aiona, M. Motion of the center of mass in children with spastic hemiplegia: Balance, energy transfer, and work performed by the affected leg vs. the unaffected leg. Gait Posture 2014, 39, 570–576. [Google Scholar] [CrossRef] [PubMed]
- Krkeljas, Z. Changes in gait and posture as factors of dynamic stability during walking in pregnancy. Hum. Mov. Sci. 2018, 58, 315–320. [Google Scholar] [CrossRef] [PubMed]
- Choi, A.; Sim, T.; Mun, J.H. Improved determination of dynamic balance using the centre of mass and centre of pressure inclination variables in a complete golf swing cycle. J. Sports Sci. 2016, 34, 906–914. [Google Scholar] [CrossRef] [PubMed]
- Choi, A.; Lee, J.M.; Mun, J.H. Ground reaction forces predicted by using artificial neural network during asymmetric movements. Int. J. Precis. Eng. Manuf. 2013, 14, 475–483. [Google Scholar] [CrossRef]
- McPoil, T.G.; Cornwall, M.W.; Yamada, W. A comparison of two in-shoe plantar pressure measurement systems. Lower Extrem. 1995, 2, 95–103. [Google Scholar]
- Orlin, M.N.; McPoil, T.G. Plantar pressure assessment. Phys. Ther. 2000, 80, 399–409. [Google Scholar] [CrossRef]
- Ngoh, K.J.H.; Gouwanda, D.; Gopalai, A.A.; Chong, Y.Z. Estimation of vertical ground reaction force during running using neural network model and uniaxial accelerometer. J. Biomech. 2018, 76, 269–273. [Google Scholar] [CrossRef]
- Santhiranayagam, B.K.; Lai, D.T.; Sparrow, W.A.; Begg, R.K. A machine learning approach to estimate minimum toe clearance using inertial measurement units. J. Biomech. 2015, 48, 4309–4316. [Google Scholar] [CrossRef] [PubMed]
- Findlow, A.; Goulermas, J.Y.; Nester, C.; Howard, D.; Kenney, L.P.J. Predicting lower limb joint kinematics using wearable motion sensors. Gait Posture 2008, 28, 120–126. [Google Scholar] [CrossRef] [PubMed]
- Byun, S.; Han, J.W.; Kim, T.H.; Kim, K.W. Test-retest reliability and concurrent validity of a single tri-axial accelerometer-based gait analysis in older adults with normal cognition. PLoS ONE 2016, 11, e0158956. [Google Scholar] [CrossRef] [PubMed]
- Esser, P.; Dawes, H.; Collett, J.; Howells, K. IMU: Inertial sensing of vertical CoM movement. J. Biomech. 2009, 42, 1578–1581. [Google Scholar] [CrossRef] [PubMed]
- Schollhorn, W.I. Applications of artificial neural nets in clinical biomechanics. Clin. Biomech. 2004, 19, 876–898. [Google Scholar] [CrossRef] [PubMed]
- Liu, Y.; Shih, S.M.; Tian, S.L.; Zhong, Y.J.; Li, L. Lower extremity joint torque predicted by using artificial neural network during vertical jump. J. Biomech. 2009, 42, 906–911. [Google Scholar] [CrossRef] [PubMed]
- Dao, T.T. From deep learning to transfer learning for the prediction of skeletal muscle forces. Med. Biol. Eng. Comput. 2018, 57, 1049–1058. [Google Scholar] [CrossRef] [PubMed]
- Montero-Odasso, M.; Hachinski, V. Preludes to brain failure: executive dysfunction and gait disturbances. Neurol. Sci. 2014, 35, 601–604. [Google Scholar] [CrossRef] [PubMed]
- Benson, L.C.; Clermont, C.A.; Osis, S.T.; Kobsar, D.; Feber, R. Classifying running speed conditions using a single wearable sensor: Optimal segmentation and feature extraction methods. J. Biomech. 2018, 71, 94–99. [Google Scholar] [CrossRef] [PubMed]
- Choi, A.; Yun, T.S.; Suh, S.W.; Yang, J.H.; Park, H.; Lee, S.; Roh, M.S.; Kang, T.G.; Mun, J.H. Determination of input variables for the development of a gait asymmetry expert system in patients with idiopathic scoliosis. Int. J. Precis. Eng. Manuf. 2013, 14, 811–818. [Google Scholar] [CrossRef]
- Hu, B.; Dixon, P.C.; Jacobs, J.V.; Dennerlein, J.T.; Schiffman, J.M. Machine learning algorithms based on signals from a single wearable inertial sensor can detect surface- and age-related differences in walking. J. Biomech. 2018, 71, 37–42. [Google Scholar] [CrossRef] [PubMed]
- Plotnik, M.; Bartsch, R.P.; Zeev, A.; Giladi, N.; Hausdorff, J.M. Effects of walking speed on asymmetry and bilateral coordination of gait. Gait Posture 2013, 38, 864–869. [Google Scholar] [CrossRef] [PubMed] [Green Version]
- Lafond, D.; Duarte, M.; Prince, F. Comparison of three methods to estimate the center of mass during balance assessment. J. Biomech. 2004, 37, 1421–1426. [Google Scholar] [CrossRef]
- Choi, A.; Joo, S.B.; Oh, E.; Mun, J.H. Kinematic evaluation of movement smoothness in golf: relationship between the normalized jerk cost of body joints and the clubhead. Biomed. Eng. Online 2014, 13, 20. [Google Scholar] [CrossRef] [PubMed]
- Winter, D.A. Biomechanics and Motor Control of Human Movement, 2nd ed.; John Wiley &Sons: Hoboken, NJ, USA, 1990. [Google Scholar]
- Winter, D.A. Human balance and posture control during standing walking. Gait Posture 1995, 3, 193–214. [Google Scholar] [CrossRef]
- Hsue, B.J.; Miller, F.; Su, F.C. The dynamic balance of the children with cerebral palsy and typical developing during gait. Part I: Spatial relationship between COM and COP trajectories. Gait Posture 2009, 29, 465–470. [Google Scholar] [CrossRef]
- Arjmand, N.; Ekrami, O.; Shirazi-Adl, A.; Plamondon, A.; Parnianpour, M. Relative performances of artificial neural network and regression mapping tools in evaluation of spinal loads and muscle forces during static lifting. J. Biomech. 2013, 46, 1454–1462. [Google Scholar] [CrossRef]
- Lisboa, P.J. A review of evidence of health benefit from artificial neural networks in medical intervention. Neural Netw. 2002, 15, 11–39. [Google Scholar] [CrossRef]
- Kipp, K.; Giordanelli, M.; Geiser, C. Predicting net joint moments during a weightlifting exercise with a neural network model. J. Biomech. 2018, 74, 225–229. [Google Scholar] [CrossRef] [Green Version]
- Liu, M.M.; Herzog, W.; Savelberg, H.H. Dynamic muscle force prediction from EMG: an artificial neural network approach. J. Electromyogr. Kinesiol. 1999, 9, 391–400. [Google Scholar] [CrossRef]
- Nweke, H.F.; Teh, Y.W.; Al-Garadi, M.A.; Alo, U.R. Deep learning algorithms for human activity recognition using mobile and wearable sensor networks: State of the art and research challenges. Expert Syst. Appl. 2018, 105, 233–261. [Google Scholar] [CrossRef]
- Winter, D.A.; Sidwall, H.G.; Hobson, D.A. Measurement and reduction of noise in kinematics of locomotion. J. Biomech. 1974, 7, 157–159. [Google Scholar] [CrossRef]
- Kim, T.H.; Choi, A.; Heo, H.M.; Kim, K.; Lee, K.; Mun, J.H. Machine learning -based pre-impact fall detection model to discriminate various types of fall. J. Biomech. Eng. 2019, 141, 081010. [Google Scholar] [CrossRef] [PubMed]
- Mazilu, S.; Hardegger, M.; Zhu, Z.; Roggen, D.; Troester, G.; Plotnik, M.; Hausdorff, J.M. Online detection of freezing of gait with smartphones and machine learning techniques. In Proceedings of the 2012 6th International Conference on Pervasive Computing Technologies for Healthcare (PervasiveHealth) and Workshops, San Diego, CA, USA, 21–24 May 2012; pp. 123–130. [Google Scholar]







{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Filtering Cutoff Frequencies of Inputs | FFANN | LSTM | |||
|---|---|---|---|---|---|
| r | RMSE (deg) | r | RMSE (deg) | ||
| Sagittal plane | 2 Hz | 0.73 | 3.76 (0.54) | 0.90 | 2.24 (0.61) |
| 10 Hz | 0.81 | 3.01 (0.18) | 0.92 | 1.97 (0.81) | |
| 25 Hz | 0.76 | 3.43 (0.32) | 0.91 | 2.13 (0.71) | |
| Frontal plane | 2 Hz | 0.86 | 1.33 (0.22) | 0.95 | 0.85 (0.19) |
| 10 Hz | 0.87 | 1.27 (0.05) | 0.96 | 0.82 (0.16) | |
| 25 Hz | 0.84 | 1.42 (0.10) | 0.96 | 0.81 (0.10) | |
© 2019 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Choi, A.; Jung, H.; Mun, J.H. Single Inertial Sensor-Based Neural Networks to Estimate COM-COP Inclination Angle During Walking. Sensors 2019, 19, 2974. https://doi.org/10.3390/s19132974
Choi A, Jung H, Mun JH. Single Inertial Sensor-Based Neural Networks to Estimate COM-COP Inclination Angle During Walking. Sensors. 2019; 19(13):2974. https://doi.org/10.3390/s19132974
Chicago/Turabian StyleChoi, Ahnryul, Hyunwoo Jung, and Joung Hwan Mun. 2019. "Single Inertial Sensor-Based Neural Networks to Estimate COM-COP Inclination Angle During Walking" Sensors 19, no. 13: 2974. https://doi.org/10.3390/s19132974